
Abstract
On-orbit capture is an important technique for the space debris removal, refueling, or malfunction satellite repairing. While due to the uncertainty of the motion parameters of the space noncooperative target, the impact between the capture device and the noncooperative target during the capturing process is inevitable, which may bring strong vibration perturbation to the base satellite, and potentially alter the position and the attitude of the servicing spacecraft, or even cause failure of on-orbit tasks. This article presents a new and alternative method for passive suppression of spacecraft impact and perturbation during noncooperative spacecraft capture. The passive device based on bioinspired X-shape is installed between the satellite and the capture device. In the capture process, nonlinear damping of the passive isolation structure can significantly reduce impact/vibration perturbation. For performance analysis, dynamic equations of the isolation system are established. Based on which, the relationship between structure parameters and isolation performance is systematically analyzed. Experiments are conducted for verification of the effectiveness of the proposed method. Moreover, an optimal process using the non-dominated sorting genetic algorithm II optimization method is developed to minimize impact/vibration perturbation effect, and optimal solutions can provide useful reference for the passive isolation system design.
Keywords
Introduction
On-orbit servicing using space robots has been proposed for many applications including inspection, assembly, and retrieval of malfunctioning satellites or orbital debris in recent years, and it will become routine work in future space operation. For the on-orbit servicing missions for the noncooperative space target parameters or dynamics parameters can not be obtained, like the space debris removal mission, because the parameters of the motion of the them, the mass, the rotation angular speed are hardly to obtain. 1,2 A capturing operation consists of three specific phases: the pre-capture phase, the capture phase, and the post-capture phase. For noncooperative targets especially tumbling ones, it is difficult to obtain accurate motion/dynamics states. In addition, there are errors and time delay in control system of on-orbit servicing. Thus, in capture phase, the impact between the space capture device and the noncooperative target is inevitable, which can result in undesired structure vibration of flexible links or drifting movement for the satellite platform, 3 or even cause damage to the on-board instruments of the servicing spacecraft. Thus, the impact/vibration perturbation control is essential in the capture process.
For the impact/vibration perturbation problem in capturing operations missions, there are several different types, including the active control, the passive isolation, and the semi-active control. Active system is very attractive and powerful, as it can use sensors and external actuators to provide feedback signals and control force. There are many works that have been published on this subject. Shibli et al. studied a unified control-oriented modeling of a free-flying space robot to deal with kinematics, constraints, and dynamics of a free-flying space robot interacting with a target satellite. 4 In the study by Carrella et al., 5 a composite controller combining disturbance observer-based control with proportional differential control (PD) control for the flexible spacecraft attitude stability has been investigated. In the studies by Geng et al., 6,7 the biases in the model that cause degradation of tracking performance are studied, and a Markovian jump ionospheric bias model is presented to transform the model uncertainties to the parameter randomness. Then an optimal linear joint estimator is developed to minimize the mean-squared error sense. Although these active control approaches can perform well in particular vibration control problems, the associated problems are also obvious, such as instability due to spillover effect, 8 and high-power demands strictly limit space applications. In the studies by Robertson et al. 9 and Liu et al., 10 a semi-active vibration suppression system was developed to avoid disadvantages of active systems. The semi-active vibration suppression system does not require any external energy to suppress vibrations but does require external controllers, sensors, and other devices, which consume a substantial amount of electrical energy. Passive isolation systems for impact/vibration perturbation control isolation have been widely applied for space applications, as dynamic energy can be dissipated by structural damping and the friction of passive system. Advantages of passive systems lie on high reliability, simple construction, easy maintenance, and independence of external power. In the study by Casciati et al., 11 the performance of spring-mass-damper (SMD) for repetitive impact is studied, and it showed that the increase of linear damping in SMD system can result in smaller resonant amplitude, while the smaller resonate amplitude may cause worse isolation performance beyond resonant range . In the studies by Onoda et al. 12,13 and Makihara et al., 14 quasi-zero-stiffness isolation, which can realize negative, zero stiffness was studied, but complex nonlinear behavior may be instable in practice.
In recent years, due to low cost and high reliability, passive impact/vibration isolation methods based on bioinspired X-shaped structure were proposed and studied. 15 –17 In the X-shaped structure, nonlinear damping and stiffness induced by geometric relationship of rod, rotation joints, and spring were exploited to isolate vibration perturbation. It demonstrated that the X-shaped structure can perform good vibration due to the nonlinear damping and stiffness which can be designed through changing structure parameters. In the studies by Dai et al., 18,19 the X-shaped structure is applied in the post-capture vibration suppression, and numerical simulations are provided to demonstrate validation of the proposed isolation structure.
Based on the feasibility investigation of previous results, 19 in this paper, a passive impact/vibration suppression system is proposed and established for capturing noncooperative space targets, and experiments of the impact/vibration isolation systems are provided to validate performance. Based on the relationship between structure parameters and isolation performance, an optimization process is provided to optimize structure parameter and improve impact/vibration isolation performance. The main contributions of this article include the following: (1) A passive impact/vibration suppression system is developed and its dynamic equations of passive isolation structures are systematically investigated for space noncooperative target capture. (2) Prototype of the passive isolation system is developed, and experiments of position/attitude perturbation isolation are conducted for validation. It is shown that experiments results are consistent with that obtained with the numerical approach. (3) Based on analysis of relationship between structure parameters and the suppression performance, an optimization process is proposed to improve vibration isolation performance of the system. The optimization results can provide useful reference for the design of the passive isolation system.
The rest of the article is organized as follows: In the second section, the geometric relationship of passive isolation structures is given, and dynamic equations of the two-degree passive isolation system are developed. Based on these, the relationship between structure parameters and passive suppression effect is analyzed. In the third section, ground experiments of passive isolation are developed to verify the proposed isolation structure systems. Then in the fourth section, an impact/vibration perturbation isolation optimization process is proposed, and structure parameters are optimized to minimize perturbation displacement, velocity, and maximal acceleration. Finally, conclusions are given in the fifth section.
Modeling of the passive impact/vibration isolation system
Problem statement
As motion parameters of the space noncooperative target cannot be obtained accurately in capture, the perturbation between the manipulator and the space target is inevitable. The large impact or vibration perturbation caused by the spacecraft capture can seriously affect the stability and security of the satellite base, which may result in failure of on-orbit task. For space noncooperative target capture, assuming

In case that the noncooperative target has flexible appendages like solar sailing panel, the impact perturbation in capture can result in vibration perturbation. In this article, based on the study of bioinspired passive isolation structure in Wu et al., 15 a passive isolation structure is developed. The space noncooperative target capture using the passive impact/isolation is shown in Figure 1. The passive isolation system is installed between the capture mechanism and the satellite base. In the noncooperative target capture, the impact/vibration perturbation is transferred from the capture mechanism to the passive isolation structure, and then affect the state of satellite base.

The diagram of the noncooperative target capture.
Modeling of the passive impact/vibration isolation system
The schematic diagram of the two-degree perturbation isolation structure is shown in Figure 2, and

Two-degree impact perturbation suppression system.
From Figure 3, geometrical relation of variables The geometric relationship of perturbation suppression system.
Then it has

The Lagrange’s equations are used to formulate nonlinear dynamics system. The kinetic energy of impact suppression system is

And the potential energy of the whole system can be written as

Then the whole energy is

where

The equations of motion of present system under external forces can be established by Lagrange’s equations

Then dynamic equation can be obtained as

Then it has

Using Taylor expansion series, this equation can be transformed as

where

Impact/vibration suppression
In this section, taken example of the passive isolation, the relationship between isolation system parameters and the isolation performance is studied and analyzed in case of the impact perturbation and the vibration perturbation.
Impact perturbation
In case of the impact isolation for the noncooperative spacecraft, the external force

The effect of parameter k 1 (a) position displacement, (b) the velocity, (c) the acceleration.

The effect of parameter k 2 (a) position displacement, (b) the velocity, (c) the acceleration.
The influence of the rod length for the impact isolation performance is shown in Figure 6, the rod length is set as

The effect of rod length (a) position displacement, (b) the velocity, (c) the acceleration.
The effects of rotation friction are shown in Figure 7. The rotation friction coefficients are set as
The curves of the displacement, the velocity, and the acceleration for different value of layer number can be found in Figure 8. The layer number is set as

The effect of rotation friction coefficients (a) position displacement, (b) the velocity, (c) the acceleration.
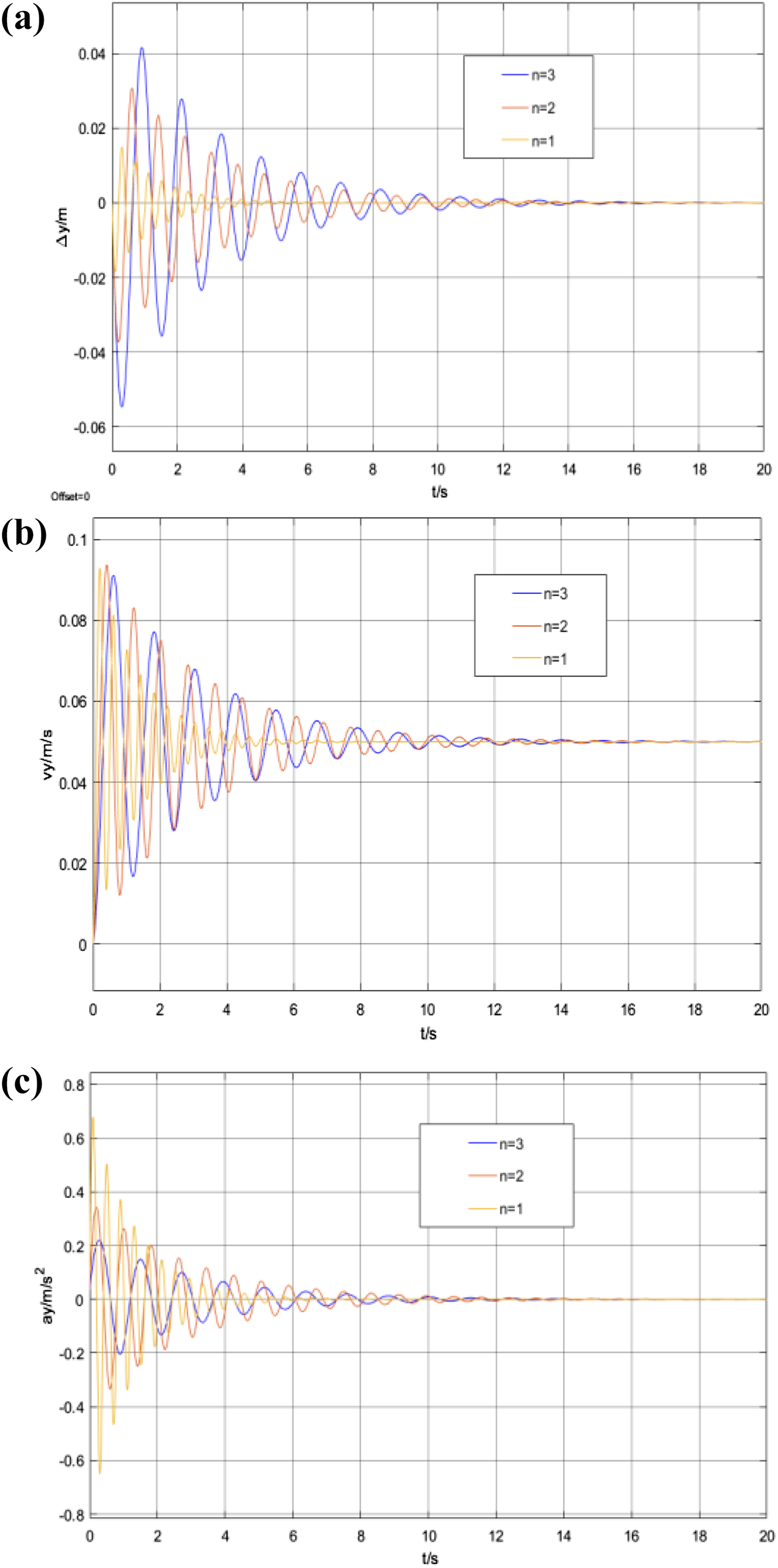
The effect of layer number (a) position displacement, (b) the velocity, (c) the acceleration.
The influence of the assembly angle for impact isolation performance is provided in Figure 9. The assembly angle is set as

The effect of assembly angle (a) position displacement, (b) the velocity, (c) the acceleration.
Vibration isolation
The vibration isolation structure is set as

(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency
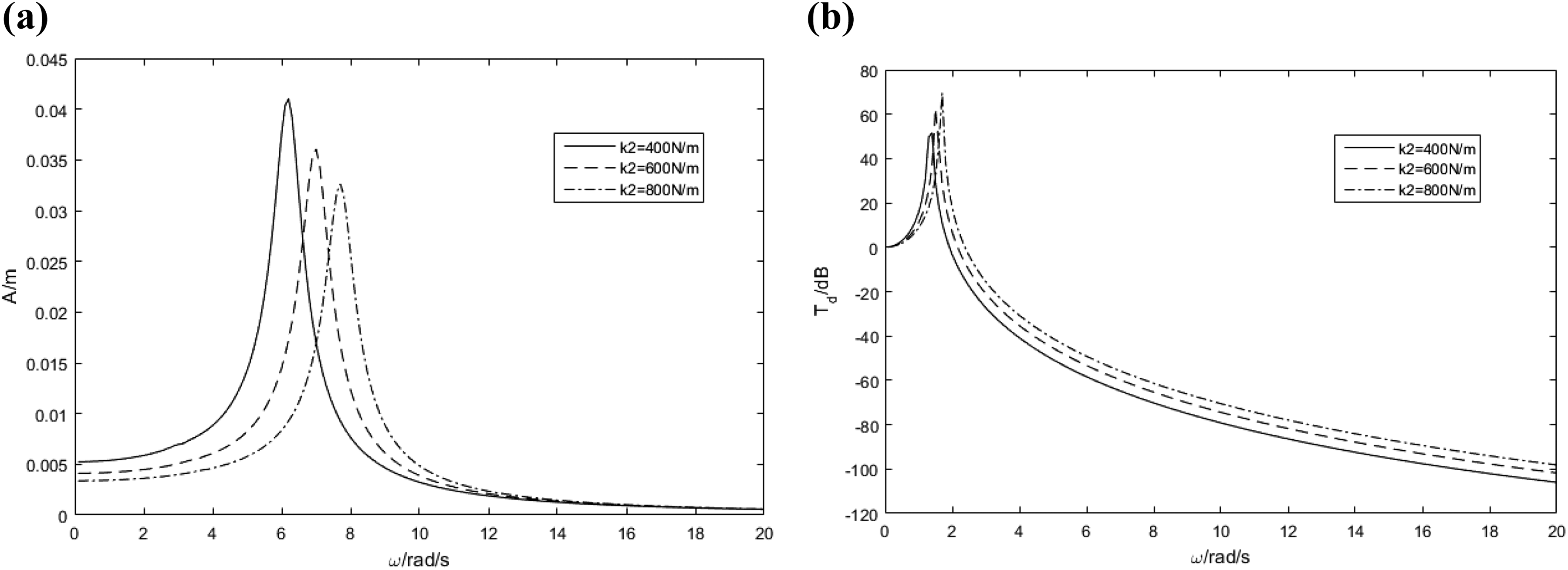
(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency

(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency (c).

(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency (l).
The influence of rotation friction coefficients for the maximum amplitude and the displacement transmissibility are shown in Figure 12. The rotation friction coefficients are set as

(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency (n).
The effect of the rod length for the maximum amplitude and the displacement transmissibility is shown in Figure 13. The rod length is set as
The influence of layer number for maximum amplitude and displacement transmissibility are shown in Figure 14. The layer number is set as
The curves of effect of assembly angle for maximum amplitude and displacement transmissibility are shown in Figure 15. The assembly angle in three cases is set as

(a) Amplitude versus excitation frequency and (b) displacement transmissibility versus frequency (θ 0).
In sum, from the simulation results, it is found that, for both of the impact case and the vibration case, the isolation performance is significantly influenced by the structure parameters, like the stiffness parameter, the layer number, the rod length, and the rod friction of the system. The simulation results demonstrate that the relationship between these structure parameters and the isolation performance is highly nonlinear. From equation (9), it can be found that, in case of impact
Experiments on impact perturbation
In this section, to verify the efficiency of the proposed method for both the impact isolation and the vibration isolation, experiments of the position isolation performance are provided using the two-degree passive isolation system.
To validate the performance of the proposed impact/vibration isolation system, a scaled physical model was built, in Aerospace Flight and Dynamical Laboratory at Northwestern Polytechnic University, as shown in Figure 16. The schematic of the isolation system shows that the isolation structure is installed between the front and the behind platforms to isolate impact/vibration that transforms from the front platform to the back platform. The front platform represents capture mechanism of the satellite, and the behind platform represents the satellite base.
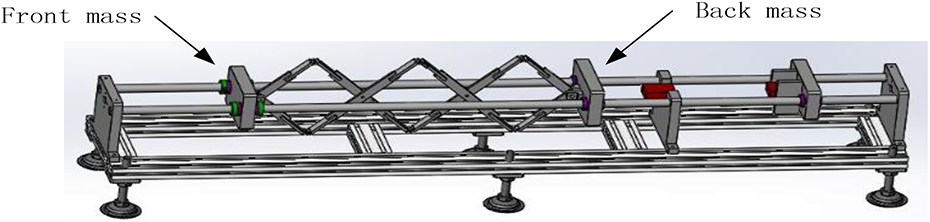
The ground experiment system of the X-shape impact/vibration isolation.
In experiment equipment, the front mass, the back mass, and the isolation system can slide on smooth parallel bars. As the friction is very small and can be ignored, the whole system can be utilized as simplification of the two-degree of spacecraft impact/vibration isolation modeling. In this experiment simulation section, structure parameters are chosen as

Impact isolation experiment.
The numerical and experiment simulation results are shown in Figures 18
to 20. From Figure 18, it is shown that the system keeps stable after 0.84 s. The maximum relative displacement is about 0.015 m, and the final relative displacement is zero using the numerical simulation result; while experiment simulation results show that the displacement did not change after 1.32 s, the maximum relative displacement reaches to 0.040 m, and the average final relative displacement is 0.004 m. For velocity, the maximum velocity using the numerical approach is about

Displacement of impact isolation experiment.

Velocity of impact isolation experiment.
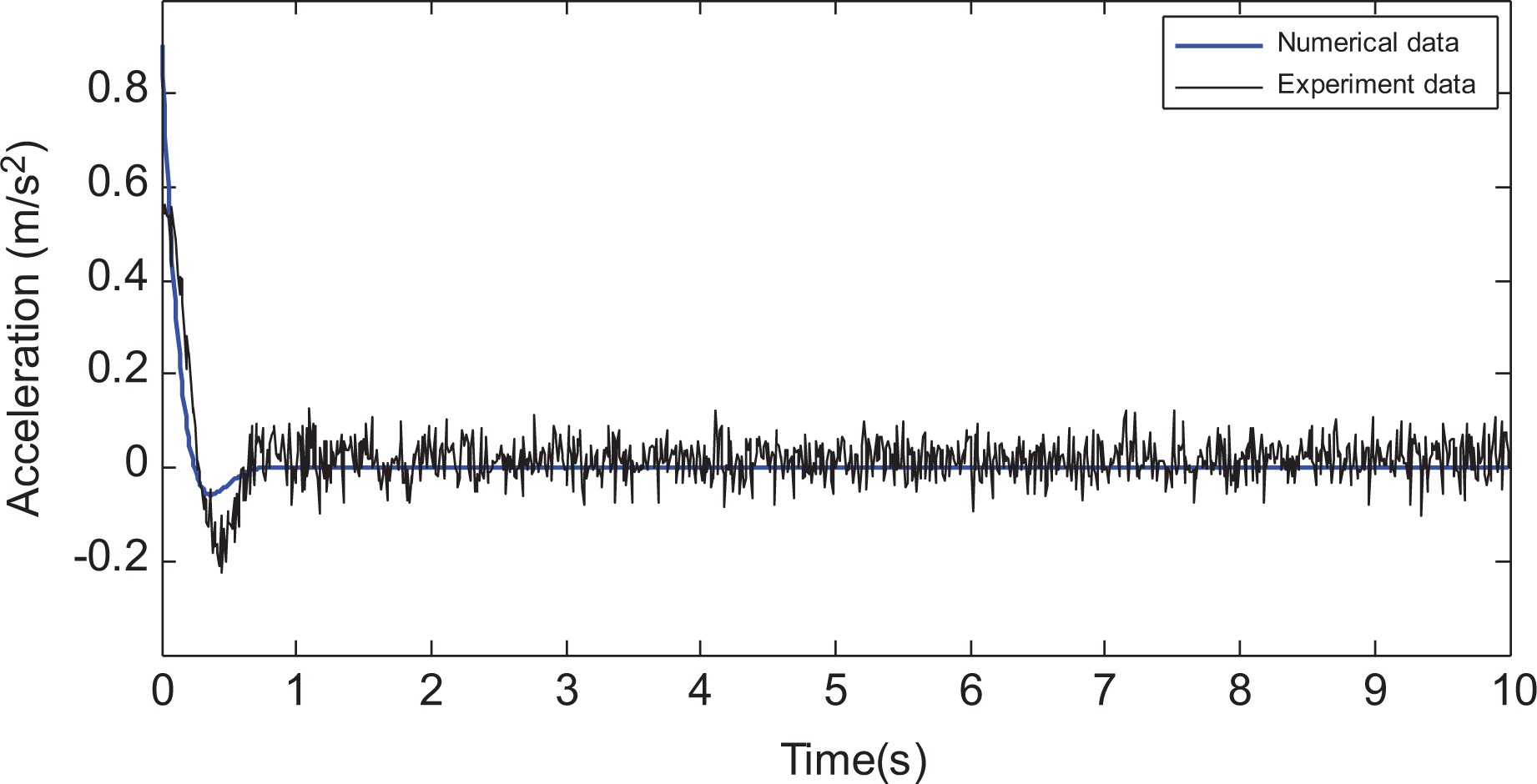
Acceleration of impact isolation experiment.
In case of the vibration isolation experiment, as shown in Figure 21, the vibration generation is utilized as the vibration resource, and other experiment facilities are same as impact isolation experiment. The vibration resource is
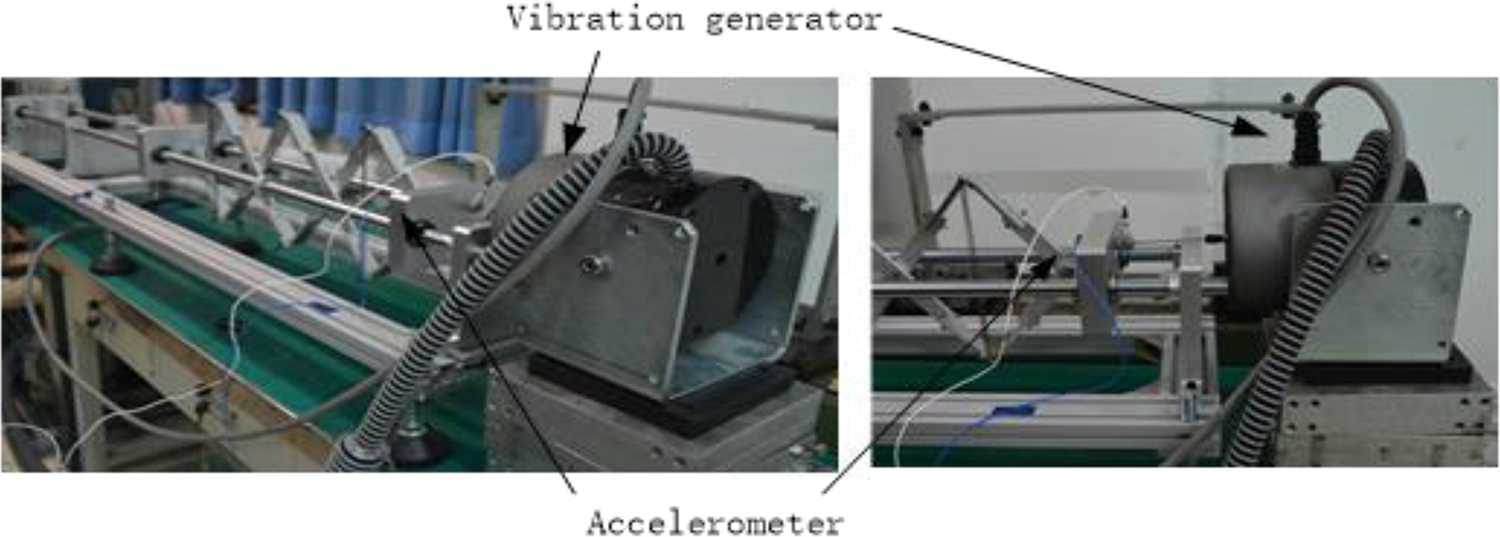
Vibration isolation experiment.
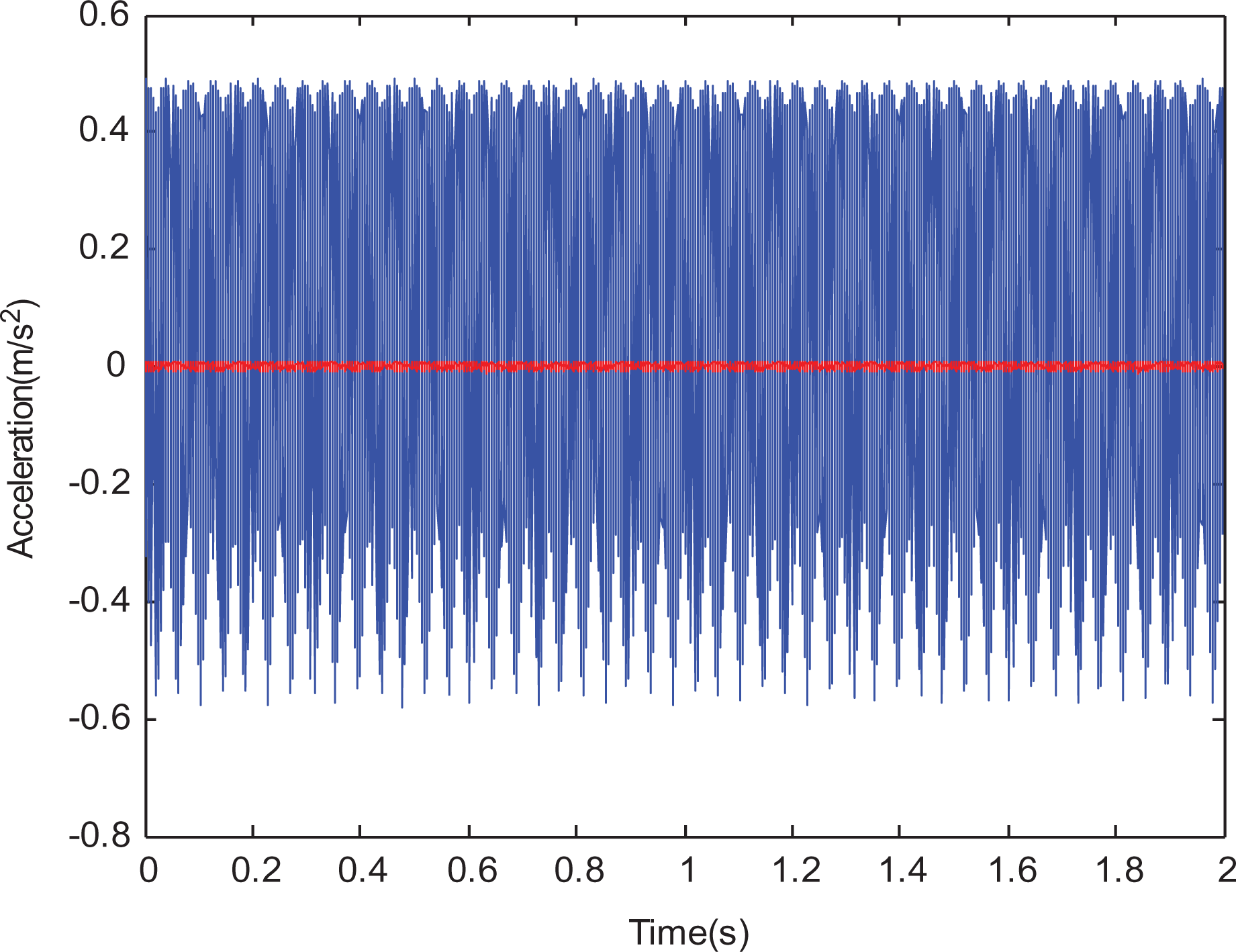
Vibration isolation experiment results.

Displacement transmissibility of vibration isolation experiment.
The displacement transmissibility is shown in Figure 23. In numerical simulations, the maximum displacement transmissibility is about 18.2, while in experiment it is about 36.5. The average error between numerical and experiment is 24.3%. As the friction coefficients and rotation friction coefficients cannot be obtained accurately, the experiment simulation result is considered to be consistent with experiment results. It should be noted that in this experiment the small vibration/impact perturbation is applied to demonstrate the efficiency of the proposed isolation system. In practice, the size of isolation structure can be enlarged and can bear big perturbation. Besides, given the parameters of isolation structure, the maximum impact/vibration perturbation it can suffer can be obtained, which can provide safety constraints for on-orbit capture mission design.
Performance optimization
Optimization problem statement
For the space noncooperative target capture mission, the displacement, the velocity, and the acceleration of the servicing spacecraft can be regarded as indexes of impact/vibration isolation performance. From the second and third sections, it can be found that the geometric parameters, stiffness, friction coefficients, and the layer number of the isolation structure can significantly influence the isolation performance. In this section, an optimization program is developed to minimize the impact/vibration perturbation. Considering the indexes of the isolation performance as the optimal targets, then the isolation performance optimization problem can be converted as a multi-objective optimization problem (MOP). A MOP can be stated as follows

where
Optimization process and results analysis
As stated in the “Optimization problem statement” section, three indexes including position displacement, velocity, and acceleration of capture satellite are set as objects of optimization targets. The isolation system parameters, like stiffness, rod length, initial assembly angle, friction coefficients, are set as optimal variables. In this section, non-dominated sorting genetic algorithm (NSGA) is applied for the impact/vibration isolation performance problem. The detailed algorithm flow is provided as follows: Step 1: Select an initial population randomly from the set: Step 2: Calculate if these variables can satisfy boundary constraints. Step 3: Initialize Step 4: Set Step 5: Generate subpopulation using GA cross-variation algorithm. Step 6: Form population and subpopulation as a new population, and return to step 2. If the evolution number satisfies the stopping criterion, record the best range.
Here an impact/vibration perturbation isolation structure system optimization problem is provided. As stated in the “Optimization problem statement” section, in space target capture, the relative velocity vr
is set as

The optimal result of the impact isolation and vibration isolation are shown in Figures 24 and 25. Each point in the figure is an optimal result, and all of these points formed optimal Pareto set. The results show that the acceleration range is

Impact isolation optimization result.

Vibration isolation optimization result.
In the on-orbit servicing application, the impact between the capture satellite and the target is inevitable and it is difficult to obtain the magnitude of impulse and disturbance force accurately. However, as the relative velocity between the servicing satellite and the target satellite can be estimated, the range of the impact/vibration magnitude can also be estimated. Thus, the proposed optimization approach can be utilized to optimize the structure parameters to minimize the impact/vibration perturbation performance, in order to guarantee the safety of the on-orbit servicing. It is useful in the structure design of the impact/vibration isolation system. Taking example of the malfunction satellite capture, given the range of the structure parameters of the isolation system, the optimal isolation performance, namely the displacement, the minimal impact acceleration of the servicing satellite can be obtained using the proposed method. These impact/vibration isolation performance results can be utilized to calculate the maximum control error of the servicing satellite in the process of the control system design.
Conclusions
In this article, a passive anti-vibration/impact method for impact/vibration perturbation isolation of space noncooperative target capture is presented systematically with both theoretical analysis and experimental validation on ground. The following conclusions can be drawn: Novel prototypes of a passive isolation structure system are developed, and the corresponding dynamics equations are established and analyzed systematically for capturing noncooperative space targets. For position perturbation, the maximum error between numerical simulation results and experiment results for the impact isolation is less than 25.5% (position displacement), and for vibration case, the error between the numerical simulation and the experiment result is less than 24.3% (displacement transmission). Considering there are a few parameters, like friction coefficients, which cannot be obtained accurately in experiments and also due to noise effect, the overall results demonstrate a reasonable match between theoretical and experimental results. For space noncooperative targets capture, the parameters of the X-shaped structures can significantly affect isolation performance. An optimization process is developed to optimize impact/vibration perturbation isolation performance. It is shown that the optimization process based on NSGA-II algorithm can optimize structure parameters to minimize perturbation.
Footnotes
Acknowledgment
The authors would like to thank the colleagues from Northwestern Polytechnic University and the Hong Kong Polytechnic University for their valuable assistance in the laboratory experiments.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 11802238) and science award project of Xi’an city (grant no. 201616HK1020QYC1).