
Abstract
For the unmanned surface vessel in performing military missions, the safety and controllability are two basic requirements, which need reachable communication channel and reliable data transmission. This article proposes an adaptive switching model with multichannel resource and the unmanned surface vessel shore-to-sea data intercommunication design method. The scheme adopts various mechanisms such as data space, standardized encapsulation, numbering and verification, and active/passive retransmission, which can ensure reliable data transmission and provide reliable communication information for unmanned surface vessel during autonomous mission. A sea trial is also carried out on the unmanned surface vessel control system based on the design scheme. Data analysis shows that the system can successfully realize communication switching and continuous data transformation, which is consistent with design expectation, and guarantees the continuous monitoring and control of unmanned surface vessel by shore-based control station.
Introduction
As an unmanned marine intelligent delivery platform, the unmanned surface vessel (USV) is an integrated high-tech intelligent agent that combines ship design, data processing, artificial intelligence, command and control. It is involved in fields of automatic driving, autonomous collision avoidance, mission planning, target recognition, and integrated navigation. Being capable of independent planning and autonomous navigation, the USV can undertake long-term, large-scale, and low-cost marine scientific research and engineering tasks. Therefore, it is widely used in both civil and military fields, and has become a hot spot for national concern and dedicated research. Currently, the United States, boasting the largest number of USVs and the highest level of technology, leads the development of USV around the world. 1,2 In 2007, the US Navy released the Navy Unmanned Surface Vehicle Plan, stating that the application of weapons and equipment on USV must be controlled by the operators, thus maintaining a technical challenge for USV during communications, especially in range over the horizon. 3 In 2018, the US Department of Defense released the 8th edition of the Unmanned Systems Integrated Roadmap (2017–2042), indicating that there is a strong controversy over the use of lethal weapons by USVs, and emphasizing the threat identification and decision-making participation of operators in the use of autonomous weapons. 4 In 2019, entrusted by the US Naval Research Office, the American RAND Corporation compiled the Advanced Unmanned Systems, that is, Current and Future Unmanned Marine Equipment Technical Analysis, which also emphasized the need for remote decision-making control based on the operator when using the weapon. 5 From the development of USV route and planning, it can be seen that autonomy, intelligence, and grouping of unmanned systems are the main trends in the future. At the same time, legal, trust, and security constraints also exist to stipulate that the use of lethal weapons must be controlled or determined by human, and reliable shore-to-sea interoperability is the basis for weapon use and control.
Due to the development route and broad application prospects of USV, automatic control algorithms such as proportion-integration-differentiation (PID) control, trajectory tracking control, 6 fuzzy control, 7 hover control, 8 neural network control, 9,10 sliding mode control, 11 and saturated control 12 appear in automatic driving. Three-dimensional real-time path planning algorithms, 13 artificial potential field method, 14 and improved particle algorithm 15 are proposed in automatic collision avoidance. The realization of these technologies greatly supports the autonomous motion control of USV platforms. However, there are few research studies on reliable communication of USV control system. Existing research includes Beidou-based data transmission research. 16,17 It should be pointed out that the data transmission capability of Beidou channel is extremely limited with large delay, which is not enough to support the practical control of weapons. Research on dual-channel remote control of digital radio and Beidou mainly proposes the idea of timeout retransmission and verification to ensure the reliable transmission of data. 18 In the study by Cui et al., 19 an optimized multi-USVs network topology control algorithm based on EM-DPOS is proposed, targeting the optimal control of communication links. However, the sea clutter and barrier occlusion occur in USV communication, which results in unstability of data transformation and high bit error ratio. How to ensure the reliable data transformation remains unsolvable.
Motivated by the discussions above, this article aims at solving the problem by multichannel adaptive deployment. Based on the four-channel USV control system, the multichannel adaptive deployment algorithm is proposed and the USV data communication protocol is designed, which can guarantee the shore-to-sea information transmission and data transmission reliability with low redundancy. The practical sea trial is conducted to demonstrate the effectiveness of the proposed algorithm and protocol.
Overall design of USV communication system
Channel resource configuration
The USV is equipped with four communication devices: broadband data link, satellite communication equipment, shortwave radio, and Beidou satellite navigation system.
Broadband data link is a kind of commonly used wireless communication equipment with fast communication speed, large bandwidth, short delay, and high timeliness. It can realize multichannel high-definition video transmission, while the drawback is the high demand on the environment, such as the unobstructed line of sight.
Satellite communication equipment has a large coverage area, long communication distance, good communication quality, and high reliability, but it suffers from large delay and high cost of use.
Shortwave communication is widely used in maritime strategic and tactical command communication, which is the unique remote communication method that is not subject to the network hub and active relay system. The advantages of shortwave communication are the convenience of use, flexibility in networking, and long communication distance, while the disadvantages are the narrow frequency band, poor stability, and small communication capacity.
Short message communication of Beidou satellite navigation system is free of space and region restriction, and does not depend on the ground station. However, because of its large communication delay, extremely small channel capacity, and relatively poor reliability, it can only serve as an emergency channel when other channels are unreachable.
Communication design of multichannel USV control system
When the USV is performing tasks (such as the strike mission), the reliable reception of decision control command and the timely transformation of execution process information are essential to the safety and control of the process. In this sense, a reachable communication link is required. This article proposes an adaptive deployment technology for multichannel resources to ensure reliable communication connection between shore-based control stations and USV.
The communication of the USV control system is shown in Figure 1, where the USV control system consists of a shore-based control station and a ship-borne control system. The shore-based control station can be deployed on a shore base or mother ship, responsible for real-time monitoring of USV and decision-making control of mission-critical key points. As shown in Figure 1, the shore-based control station mainly comprises a monitoring center and a wireless communication device, and the channel adaptive module of the monitoring center is responsible for state monitoring, traffic statistics, error statistics, and data transceiver link selection of each communication device. The ship-borne control system mainly consists of ship-borne control center, communication system, load, navigation system, and platform system. The ship-borne control center also deploys a channel adaptive module, which is used to interact and handle information with the ship-borne carrier of the communication device. This article focuses on the adaptive method of USV control system to communication resources, namely the channel adaptive module design and the reliable communication protocol design, so as to achieve channel reachability and reliable information transmission between the shore-based control station and the USV.

USV control system. USV: unmanned surface vessel.
Multichannel resource deployment method
Definition of channel resource
According to the application environment of the channel adaptive module, it needs to complete communication link state monitoring, traffic statistics, and error statistics without manual intervention. When a state abnormality or a high bit error rate occurs, the link is automatically selected and switched seamlessly. In order to construct a universal channel adaptive deployment model, the USV communication resource space
Parameter definition of communication devices.

The channel real-time working status is defined as

The channel real-time availability index is defined by

where

Channel availability index can also be presented as the average of the three statistical periods

The smaller the value of channel availability index
Adaptive deployment model
According to the channel capability and the error mode, five connection states of the USV control system are defined, namely, full connection, sub-connection, weak connection, extremely weak connection, and no connection. Their correspondence relationship with channel state is shown in Table 2. The four connection states correspond to four levels of data communication support capabilities, with full connection indicating complete scene visual control, sub-connection indicating optional scene visual control, weak connection representing full data visual control, extremely weak connection representing key data visual control, and no connection standing for complete dependence on autonomous control of the ship-borne control system. According to communication device configuration, there is generally no connection state unless it is subject to extreme communication interference.
Correspondence between connection status and channel status.
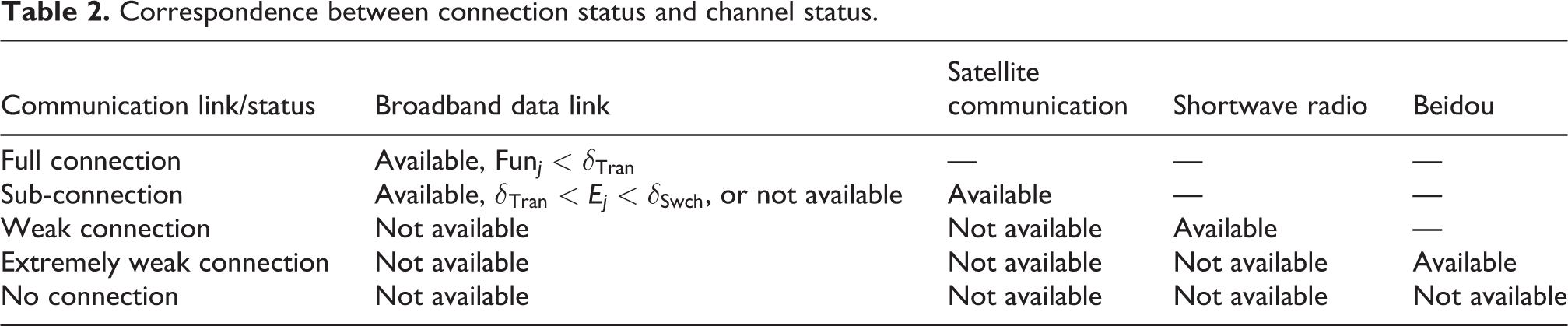
In Table 2, the symbol “—” stands for no consideration of the corresponding channel status,
Define the transmission data type Kl of a single channel as

where K is the total number of types of information transmitted by the shore-based control station and the USV in one direction,

Furthermore, define the channel switching loss C to evaluate the completeness of information transmission with

where
Reliable communication protocol design
With the advancement of autonomy and intelligence of USV, the USV ship-borne control system is now capable of performing tasks independently without relying on shore-based control commands. The shore-based control stations mainly perform status monitoring and necessary decision-making intervention control (such as target confirmation and strike control). The status monitoring mainly includes the reported messages from USV to shore-based control station, such as navigation status information, load status information, intelligence information, self-determination information, task execution monitoring information, and alarm information, to facilitate real-time grasping of USV status and handling of emergency situation of operators of shore-based control station; the operator of shore-based control station sends control commands to the USV as needed, such as task interruption, target confirmation, and fire. In view of the safe navigation control and mission execution requirements of USV, this section mainly standardizes the data to support unmanned automatic processing of it by the control system, and uses common protocol header and retransmission mechanism to ensure reliable data transmission.
Data set design
The USV data set is a complete data set

where the detailed definitions are presented in Table 3.
Definition of data set individual parameters.

After the USV control system is started, initialize the
Sort the data individuals in data space

where
Data transmission and verification
The wireless channel resources are extremely precious during USV shore-to-sea interconnection, therefore, the principle of necessity and compactness must be observed in designing the interworking data. The shore-based control station sends control data set to the USV, and the USV sends planning data set, intelligence data set, status data set, and alarm data set to the shore-based control station. In order to facilitate integrated data processing and security detection, as well as function expansion, the data are sent according to the 4-byte standard format shown in Table 4.
Standard format for USV shore-to-sea interconnection data.
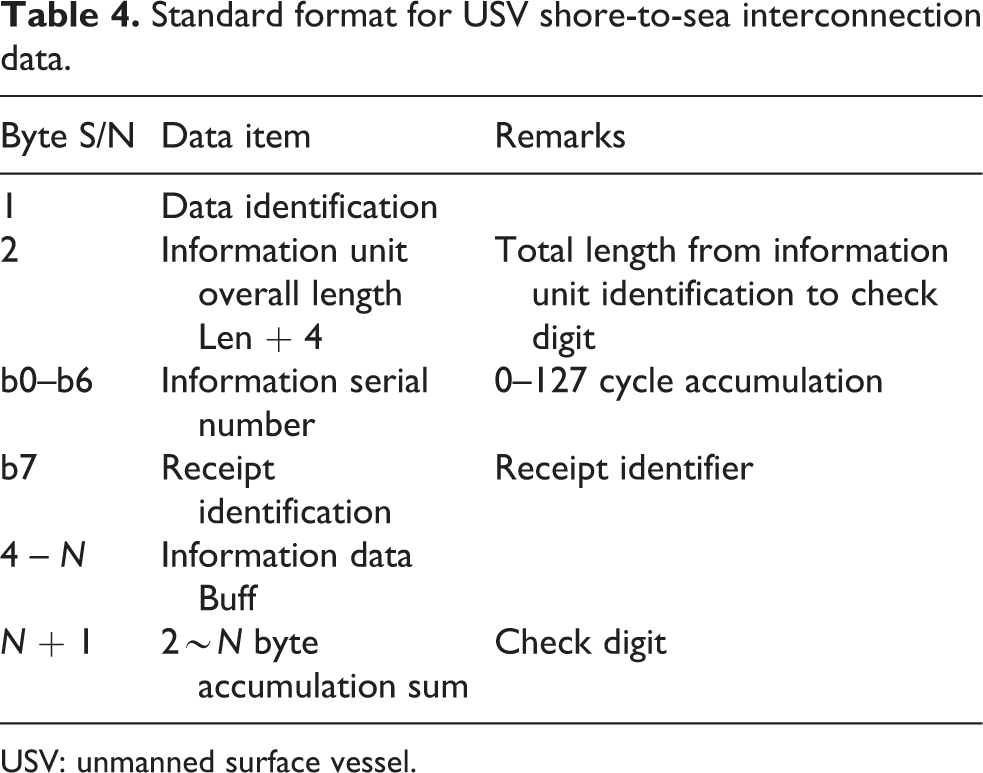
USV: unmanned surface vessel.
Data reception: After receiving the data, first perform general validity discrimination, including packet loss or out-of-order discrimination, error identification and receipt processing. Packet loss or out-of-order processing: The receiver identifies whether the packet is lost or out of order according to the serial number. When the packet is lost, the specified serial number message is sent. When the packet is out of order, it is reordered according to the serial number and issued for execution. Check digit processing: The receiver calculates whether the data packet has an error phenomenon according to the check digit. If the check is incorrect, the specified message is sent to request a retransmission command; if the receipt is required, the generated return message shall be returned via the original channel.
Data transmission: When the USV control system receives data space I change message, it extracts the Infoi of data to be sent, fills the corresponding data item in Table 4, generates the information serial number, calculates the check digit, and organizes the data to be transmitted through Link marked channel. The message will not be sent when the Link is empty.
Data retransmission mechanism
In data transmission, the error code and out-of-sequence problems during transmission are solved by increasing the serial number and check digit. To further increase the reliability of data transmission, addition of data retransmission mechanism is required so as to ensure the successful receipt of data by the other party. There are two types of retransmission mechanisms in the system design, one being the timeout retransmission, and the other being the request retransmission.
The timeout retransmission is the active reissue act of the sender regarding those data information requiring return receipt. When a channel frame drop or a flag bit error occurs, the sender will automatically retransmit the message within the specified time
The request retransmission is the passive reissue act of the sender responding to the receiver request. When the receiving end receives a data gram indicating a verification error or a packet loss, it sends a retransmission request to the sender, and the sender immediately retransmits the corresponding data according to the request.
Data analysis
In order to verify that the proposed design method in this article can adaptively switch the data communication link to ensure the continuity and reliability of data communication when the channel state changes, a USV marine verification trial is carried out. The shore-based control is deployed at an altitude of 63.7 m. At the same time, the USV sails against the shore-based control station at a constant speed of 10 m/s. The data flow and the bit error rate are collected in every 2-s period, and the results are presented in Figures 2 and 3.

Relationship between bit error rate and distance of four types of communication equipment.

Relationship between channel flow and distance of four types of communication equipment.
It can be seen from Figure 2 that the bit error rate starts to rise sharply when the distance of the broadband data link is about 27 km. At 30 km, the bit error rate exceeds 0.8, and the channel is basically unavailable; when it reaches to 31 km, manually turn off the satellite communication terminal to cause fault, and the bit error rate jumps to 1, while the error rate of shortwave radio station and Beidou has maintained at a low level.
Referring to Figures 2 and 3, when the error rate of the broadband data link rises, data information channel starts to transfer, data traffic of the broadband data link decreases and data traffic of the satellite communication increases. The sum of broadband data link and satellite communication data traffic is less than the initial total traffic about 25 M, and channel switching loss occurs. At 31 km, the satellite communication is closed, and the satellite communication traffic quickly becomes 0. Due to the high bit error rate of the broadband data link, the information transmission link is transferred to the radio and the Beidou, with the radio data traffic first increasing and then remaining steady. From the relationship between distance and bit error rate and channel data traffic, the data analysis results are consistent with the design expectations.
Conclusion
This article constructs a USV-oriented multichannel resources adaptive deployment technology and reliable communication protocol. This technology realizes the maximum communication link reachability and low redundancy reliable data transmission through adaptive deployment of communication links and reliability assurance of transmission protocols, therefore, ensures the timeliness and effectiveness of the intervention control of the shore-based control station. Having been verified by sea trials, the technology can effectively perform adaptive and seamless switching of links to achieve link reachability, and ensure information connectivity through various mechanisms such as standard data format encapsulation, coding, verification, and retransmission, so as to provide communication support for the safe and controllable operation of USV during autonomous missions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant 61903083, the Natural Science Foundation of Jiangsu Province of China under grant BK20190333, and the Southeast University “Zhishan Youth Scholars” Project.