
Abstract
Space-based Earth observation is now developing rapidly because of the advantages in coverage, convenience, and flexibility. However, it is difficult for one single satellite to realize the quick observation of wide areas. In order to catch all the significant information of a wide area in a short time, multi-satellite observation mission would be proposed. In this article, a mission planning method for online multi-satellite wide area observation is established to serve future multi-satellite observation missions. Firstly, a method for area division is proposed, and the whole area is divided into subareas. Then the multi-satellite observation path planning is realized by a strategy of path deduction. After that, a remaining time allocation method to maximize the observation gazing time of each subarea is proposed. Finally, the algorithms for the whole mission planning process are provided. Numerical simulations show that the mission planning method is able to ensure the complete coverage of different wide target areas, with high reliability and low computational complexity.
Keywords
Introduction
Space-based Earth observation is now developing rapidly, because compared with other Earth surface observation methods, space-based Earth observation has advantages in coverage, convenience, and flexibility, thus becoming a mainstream satellite function. 1 –4 Nowadays, space-based observation plays an increasingly significant role in national economic activities, disaster forecasting, land surveying and mapping, meteorological monitoring, and national defense construction. 5,6 So far, about 200 Earth observation satellites, which are above 50 kg, have been launched all over the world. As estimated, more than 400 observation satellites will be in orbit within the next decade. 3
The low Earth orbit (LEO) satellite, with the apogee altitude less than 3000 km, is the mostly used kind of satellites in space, compared with the medium Earth orbit satellite, geosynchronous Earth orbit satellite, and the highly eccentric orbit satellite, accounting for more than 80% of all the satellites in orbit. 7 And the LEO satellite becomes the most common platform in space-based observation.
Many research studies have been conducted to study the theoretical problems of LEO observation satellites, including the calculation for the visibility of targets, the coverage of the observation mission, the overtopping situation above target points, and so on. 8 –15 Ali et al. proposed an algorithm to determine the visibility-time function of the circular LEO satellite at a target point on the ground, based on approximating the subastral point trajectory as a great circle during a short time interval of observation period, neglecting the Earth’s rotation. 16 Palmer and Mai provided a fast algorithm for the prediction of passes of a LEO satellite over any given location through the sophisticated analytic model of the orbit. 17 On this basis, Wu and Palmer offered a prediction approach consisted of the coarse search, the imaging estimation, and the imaging refinement for satellite online mission planning. 18
However, due to the limitation of the field of view, the attitude maneuverability, and the insufficient observation window time of one single LEO satellite, the coverage of the surface area is still limited within one observation window time, which makes it difficult for a single satellite to quickly complete the observation of large areas. When the next observation window arrives, the effective target information might have been lost.
An effective solution is to use satellite formations that consist of multiple satellites with imaging load to observe a wide area on the ground in a short time. 19,20 When multi-satellite observes the wide area of the Earth, the coverage of the whole target area is achieved by gazing at each subarea one by one by the satellites. In the mission, the satellites gaze different subareas according to the time-target sequence obtained by the online mission planning program, as illustrated in Figure 1.

Diagram of multi-satellite wide area observation.
One of the core issues of the multi-satellite wide area observation is to establish an online mission planning method that takes both the space position constraints and the actual attitude maneuverability of satellites into consideration. So, this article proposed a mission planning program that plans the gazing sequence of each satellite according to the relative position, the size of the target area, the size of the satellite field of view, the satellite attitude maneuverability, and the position and velocity of each satellite in the formation.
In this article, a method to divide the whole area into subareas is defined at first in the second section In the third section, the multi-satellite observation path planning is realized by a strategy of path deduction. After that, a method to maximize the observation gazing time of each subarea is proposed. A multi-satellite wide area observation mission planning algorithm is also summarized. Numerical simulations for the mission planning method are proposed in the fourth section.
Subarea division of the wide area
It is assumed that the target area is parallel to the subastral point trajectory, with the center point of longitude

Diagram of spatial dimensions in observation.
According to an attitude control strategy, the yaw angles of the satellites all set to be 0 when staring at targets. When gazing at the surface of the Earth, the field of view of the cameras carried by satellites are measured by the length d and width c, respectively, representing the length and the width of ground coverage in condition of orthographic projection, measured by the distances parallel and perpendicular to the direction of satellite velocity.
During the observation period, the displacement of ground surface caused by the rotation of the Earth is commensurate to the magnitude of the camera field of view. Therefore, the influence of the rotation of the Earth must be taken into account in the planning of wide area observation mission. So in this section, an observation plane coordinate system of cameras is established, to avoid the influence of Earth rotation in the process of dividing subareas and path planning.
The camera observation plane coordinate system takes the center point of the whole target area at the time of overtopping as the origin. The value y represents the distance along the track direction of the subastral point, and the value x represents the arc distance perpendicular to the track of the subastral point. The definition of the observation coordination system is illustrated in Figure 3.

Diagram of the observation plane coordinate system.
If the target area is parallel to the subastral point trajectory as assumed before, it becomes a standard rectangle in the camera observation coordinate system, whose length direction coincides with y direction and width direction coincides with x direction. On this basis, the area shall be divided into numbered subareas.
By solving the visibility of the regional center point

The numbering rule of subareas.
The visibility of the central points of the subareas is used to represent the visibility of subareas. So in order to calculate the visible period of one subarea, the longitude and latitude of the central point of this subarea in Earth center fix (ECF) coordinate should firstly be backstepping solved according to the coordinate value of the central point in the observation system. Then the visibility prediction methods as Wu and Palmer, 18 Ali et al., 16 and Palmer and Mai 17 proposed can be used to solve the visible periods of the central points, which is equal to the visible periods of corresponding subareas.
The transformation from the observation coordinate system to ECF system is time-dependent, because of the rotation of the Earth. A method for calculating the ECF longitude and latitude of the center points of the subarea by its subarea number is given below.
Firstly, the coordinate values of the central point of the subarea in the observation coordinate system are calculated by the subarea number

And if the number starts at the lower left corner, then

Meanwhile, if the number starts at the lower right corner, then

After determining the coordinates

where
After the time t is calculated, the position

Geometric relation diagram of overtopping time.
Take the positive and negative of the angles into consideration, α is solved by

where α gets positive when it is clockwise as in Figure 5.
Ignoring the ellipticity of the Earth, once the vector


To define the quaternion

According to the properties of quaternions

While in ECF system, the geocentric vector

Through the transformation from rectangular coordinates to spherical coordinates, the longitude and latitude
Path planning for multi-satellite observation
Path deduction
Path deduction proposed in this article is used to simulate one satellite’s observation and attitude maneuver along a given route. The idea of path deduction is to accumulate time continuously and keep judging whether the next subarea by the given observation route would be visible or not after maneuvering to there. If the next subarea is invisible, it is abandoned and replaced by the subarea next to it, until the end of the route.
Considering the coverage efficiency, maneuvering time-consuming, and mission characteristics, the deduction route chosen in this article is an S-shaped path, starting from the subarea

The S-shaped deduction path.
For example, it is assumed that the satellite has established the attitude of gazing at the first subarea
The time-consuming taken by the satellite to switch its gazing attitude from one subarea center to another can be estimated by a linear formula, that

where, d means the distance between the two subarea centers, cm
is a coefficient of maneuver time-consuming, and
After the path deduction started from subarea

The result of the first time path deduction.
Take Figure 7 as an example, it can be found that
Multi-satellite path planning
The first satellite’s observation path has been obtained after the path deduction. On this basis, the path for the other satellites can be deducted.
The principle for multi-satellite path planning is similar to the first path deduction, all the satellite should follow the given observation route. However, the start of the path deduction is moved to the first subarea that has not been covered in the former path. If one subarea has already been covered before, it should be skipped in the following path deduction process.
Take the second path deduction as an example, as illustrated in Figure 8, the red points are covered in the first path deduction, and the new start point subarea becomes the first uncovered subarea in the first path deduction. Also, the subareas that have already been covered in the first path should be skipped in the following deduction, from then on.

Diagram of multi-satellite path planning.
Remaining time allocation
After multi-satellite path planning, the observation path and time series for each satellite in the formation would be obtained, including the number of the subareas, the maneuvering starting time

As for

It is possible to increase the gazing time for each subarea, but the excessive increase of the gazing time in one subarea would lead to the lack of gazing preconditions for subsequent subareas following the result of path deduction. The minimum allowable gazing time increment for all current subareas in the path is defined as the remaining time.
Before the remaining time allocation, the gazing time for all the subareas in the path except the last one is equal to
The idea of remaining time allocation proposed in this article is to calculate the difference

Then let the gazing time for the subareas from the first one to number q
1 extend for

Let the gazing time for subareas from number
The rest may be deduced by analogy, until the
Process of the algorithm
The whole process for multi-satellite wide area observation mission planning is summarized as follows.
A. Input: Inputting the initial time of program t
0. Inputting the orbit elements of each satellite Inputting the target area as Inputting the size of the satellites’ field of view inputted as c and d. Inputting the critical angle k for effective imaging. Inputting the attitude maneuverability Inputting the minimum gazing time for each subarea
B. Initialization: Calling the visibility prediction algorithm, get tc
and Judging if the target area is on left or right. Dividing the target area into subareas and numbering each subarea as Calculating Calling the visibility prediction algorithm, to get the visible period
C. Path planning:
For each satellite, Starting from the first uncovered subarea Marking subarea Finding out the next uncovered subarea If there is no more uncovered subarea, going to If If Assigning
D. Remaining time allocation:
For each satellite,
Find out all the
E. Output:
For each satellite,
Outputting the
Numerical simulations
In the third section, a method of multi-satellite wide area observation mission planning is given. In this section, the effectiveness of the method proposed would be validated by taking one Earth observation mission by a serial satellite formation as examples.
In order to accurately calculate the state of Earth in the ECI system, the starting time of the simulation needs to be given.
In the fourth section, the time January 22, 2019, 00:00:00.000 UTCG is marked as time t 0. At t 0, the orbit elements of each satellite in the serial formation are shown in Table 1.
List of orbit elements of satellites.

Example 1
Assuming that each satellite has similar attitude maneuverability and imaging performance, the parameters used in the simulation are shown in Table 2.
List of the parameters used in the simulation for example 1.

Through mission planning, the observation path of each satellite is shown in Figure 9 and the observation sequence obtained is shown in Table 3.

The observation path obtained by mission planning in example 1.
Observation sequence obtained by mission planning in example 1.

Example 2
Similarly, assuming that each satellite has similar attitude maneuverability and imaging performance, the parameters used in the simulation are shown in Table 4.
List of the parameters used in the simulation for example 2.

Through mission planning, the observation path of each satellite is shown in Figure 10 and the observation sequence obtained is shown in Table 5.

The observation path obtained by mission planning in example 2.
Observation sequence obtained by mission planning in example 2.
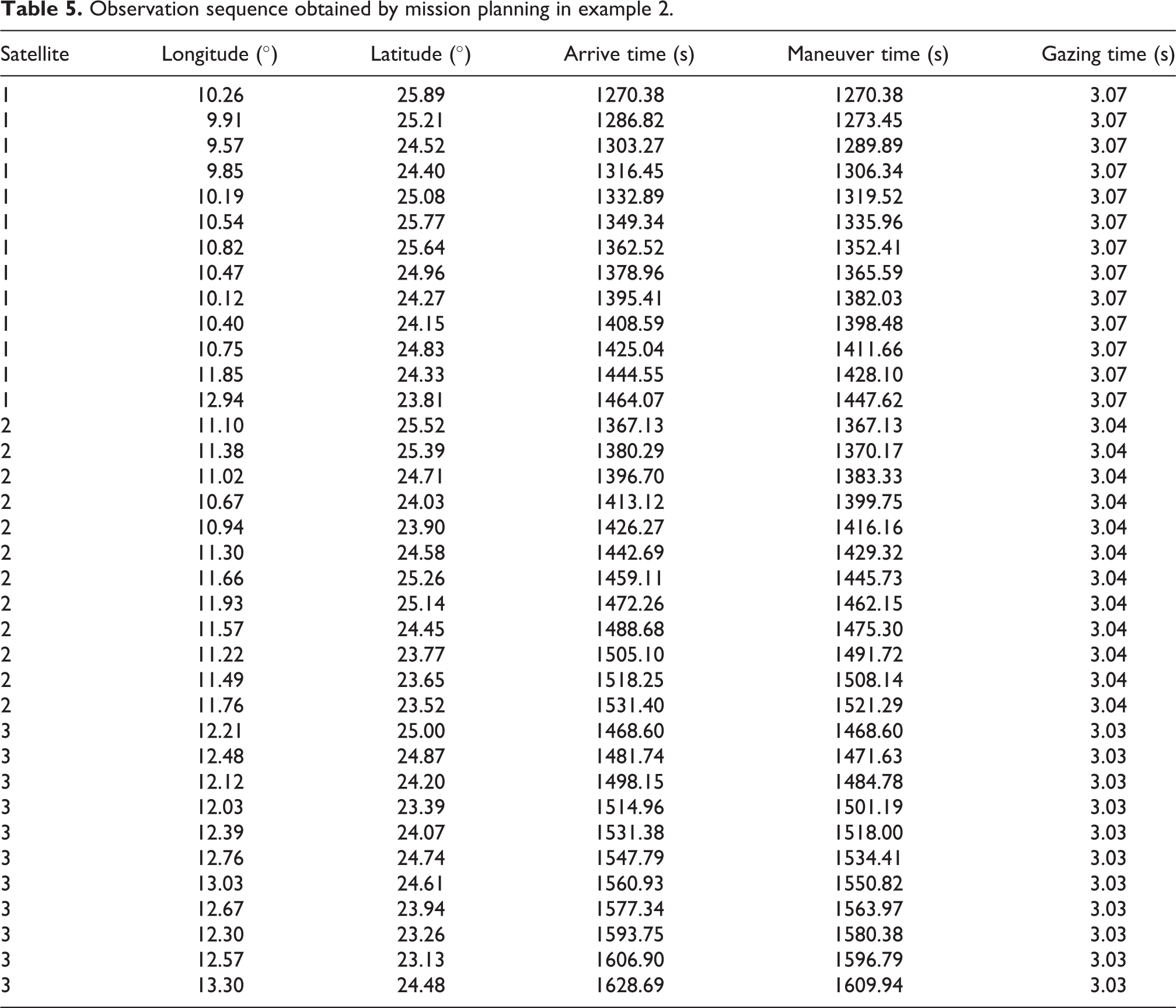
According to the simulation results, through the online mission planning program, the satellite formation has effectively completed the observation coverage of the wide area, and the observation time of each subarea has been increased as much as possible.
Conclusion
The mission planning method introduced in this article takes full account of space geometric constraints and satellite attitude maneuverability. It completes the mission planning by an S-type path deduction and remaining time allocation. This method effectively reduces the amount of computation, so that can be realized online.
It is noteworthy that this article focuses on the elaboration of the basic principles of the mission planning method, and the ideal geometric model is used in the spatial relationship to simplify the formulation of algorithms. When applied to the process of practical application, the influence factors such as the ellipse of the Earth, the height of the target area, and the perturbation of the orbit should be taken into consideration.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China under grant no. 61903278, the Natural Science Foundation of Hubei Province under grant no. 2018CFB180, and the Fundamental Research Funds for the Central Universities under grant no. 2042019kf0044.