
Abstract
Robots with complex motion paths are very rarely designed. The main obstacle is the lack of the necessary mathematical apparatus, despite the fact that the theory was proposed by Newton. We managed to formulate a new method for obtaining linear transformation parameters. It can be used for ellipse, hyperbola, as well as for other complex flat differentiable curves. A theorem for receiving the values of a transformed curve is formulated in the general case. The theoretical algorithm and the results of experimental studies using the geometric modeling method are presented. The proposed method works for all test curves, but this does not mean that it can always be used. Separation of the characteristic equation imposes additional complexity. Additional research is necessary, but it can be applied to many mechatronic frameworks now.
Introduction
Kinematics pairs with simple trajectories of motion are the basis for the design of robots, including at the present time. However, even Newton proposed to design mechatronic systems with complex trajectories of motion. Designing a robot with a complex trajectory of motion is possible due to approximation methods, but the accuracy of movement is lost. Engineering calculations are based on the movement of the point. If the motion is simple, the developer gets a simple dependence on the functions (hyperbolic) sine and cosine of one argument. The trajectory of motion is an ellipse (hyperbola). Both curves belong to the class of centrally symmetric conic sections. The solution of the resulting dependence was found in 17th centure. 1 To be fair, it should be noted that the final calculation methods were completed in the middle of the last century. 2
The ideal status is to achieve gait moving of robot will be similar to gait pattern of human or others living organism. 3,4 Gait pattern is a unique dynamic stereotype represented by gait parameters. Description of modeling and control of robot with the shape of two link snake with using of geometric mechanics at modeling mixed mechanical locomotion system is described by Tlach et al. 5
If the resultant system depends on a double parameter or includes the product (partial) of trigonometric functions, then an analytical solution has not been found so far. Approximating methods are used for calculations. They make it possible to find a solution, but technical meanings are lost. Various tests of product parameters are required for the final design. Obviously, if the engineer received an analytical solution in this case, the time of manufacture and production is decreased significantly.
The algorithms and methods of approximation are studding in the present for robots moving calculations. New approaches are proposed. 6 –10 The primary character of all methods is that they have an error. It is obvious that the design will mostly satisfy the necessary conditions if the accuracy of the calculations is ideal and the product precession will depend on manufacturing admittance only.
Let us try to find an analytical solution for complex motions using a new geometric theory. 11
Nonclassic method of linear transformations
The task of developing a mechatronic system by a complex motion trajectory was formulated by Newton.
4
He defined the concept of a canonical equation. For example, for conical sections, it has the form
Let there be an trajectory by figure
Dieudonne considered three types of symmetries on the plane: the unitary matrix

Nonorthogonal basis.
This basis determined the new direct method

where
Linear transformations of complex curves
Theoretical studies of the existence region of the angle
The characteristic equation
Theorem
A transformation
Proof
Let us prove the reverse. Let us suppose a transformation
Any singular transformation obeys a permutation symmetry as well as a non-singular conversion, since the resultant parametric system has the form
The trivial solution of the characteristic equation exists for scaling, axial compression, and rotation. The above systems did not differ much from simple transformations. The orthogonal basis does not change after all the listed conversions.
Various hypotheses have been put forward about changing the system (1) for complex curves, including:
The appearance of an independent angle
Change the record of the view function
If there is
All hypotheses are refuted theoretically. 11
The transformation of shear
Computational experiments were carried out using the method of geometric modeling. The program algorithm is quite simple.
The requested transformation parameters.
We output curve(s) will transform every part of the line of it.
Output is black.
Forward transformation parameters.
Output a new curve(s) with parameters obtained in yellow.
The experiments were carried out on plane curves with at least two symmetries Ci or Di (Weyl symmetries), in particular, the Jeromeau lemniscate, Pascal’s cochlea, various epicycloids and hypocycloids, and so on.
To solve this problem it was assumed that for the Jordan curves, in addition to the method of finding the parameters of a linear transformation, it is necessary to consider the inverse transformation from a local nonorthogonal linear coordinate system to an orthogonal one. Let us consider that the angles of the vectors of the basis have the values α and
The large number of alternatives that needs to be considered is the biggest problem for subsequent research.
The first condition for the multiplicity of solutions is the location of the basis. The classical method can have its own angle α of inclination in the range
The second manifold is determined by the form of the characteristic equation. The form of the characteristic equation has four variants. The first and second conditions contain the same situations, therefore the number of actual variants does not exceed 10. The angle
We assume that the central angle of a nonorthogonal basis can be different and depends on the type of transformation shear by X
A total of 256 options were considered. The results of the experiments and two small trivial theorems have made it possible to reduce the number of variants to 16. Computational experiments were carried out. They made it possible to find a non-projective solution for extracting the analytic formula of the transformed plane differentiable curve.
General solution algorithm
Lemma
Each arbitrary nonsingular matrix
These statements allowed finding a method of linear transformations for complex curves.
Let us split the transformation matrix into the product of two matrices:
Let us find the transformation
Let us consider a new curve description system:
Let us perform an additional transformation
Let us transform
Let us rotate the curve by its own angle α and multiply it by the scalars
The analytical formula of the transformed complex curve is found as
The lemma does not hold for transformation groups
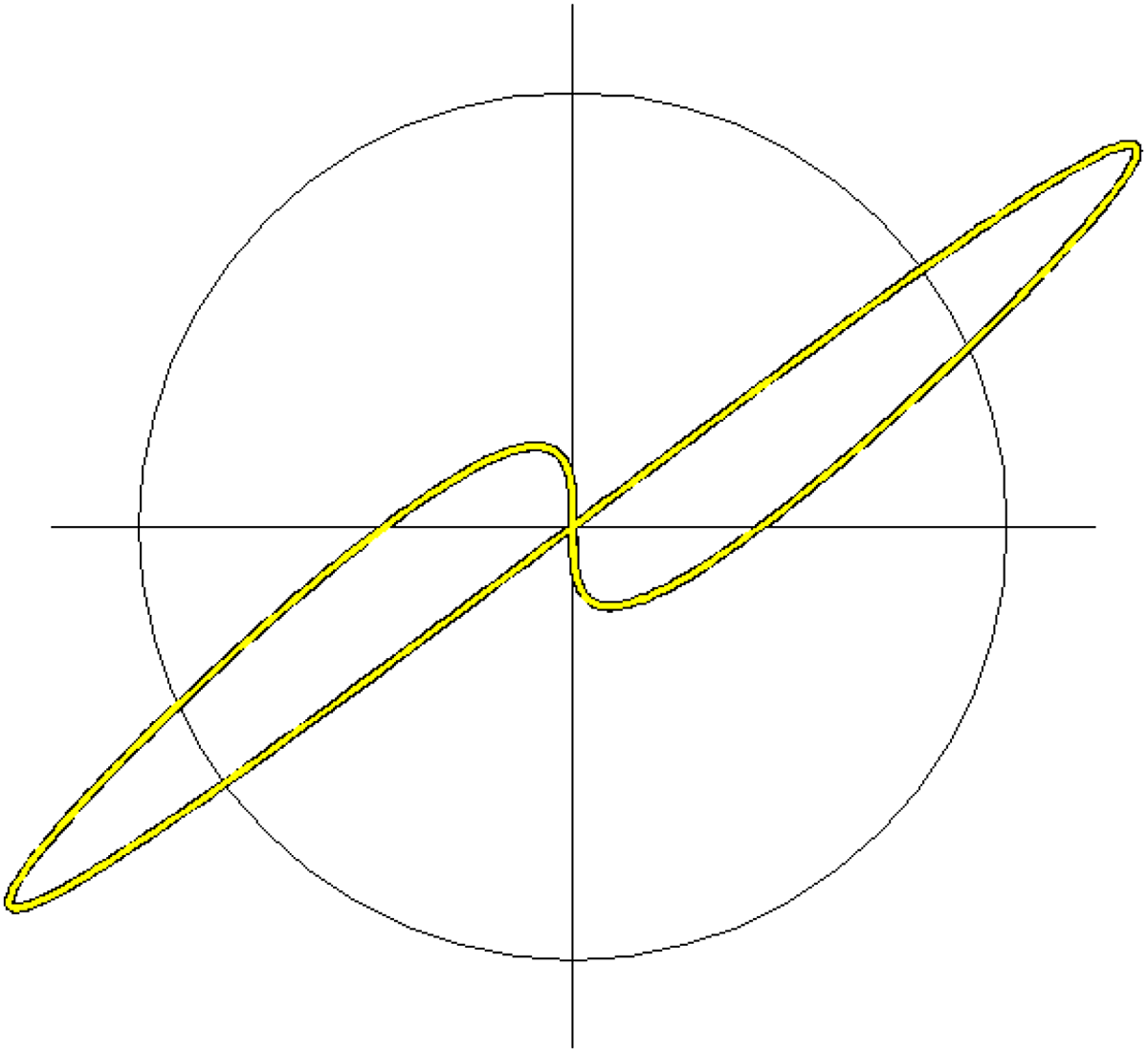
Let’s consider an example. Let the Jeromeau lemniscate (Figure 2) be transformed with a matrix

Jeromeau lemniscate.
The matrices of the transition from the basis to the basis coincide with the classical matrix, but the rows in the matrix are permutated. In addition, there are two matrices.
Let us look at the results of geometric modeling in detail.
Experiments
The research work was carried out over the Jeromeau lemniscate to simplify, which is defined by the parametric system
Computer experiments.

We did not cite all the illustrations for each experiment, but they differ in the form of the curve only. The algorithm may be used.
Additional studies were carried out for limaçon of Pascal by system
Test 1.
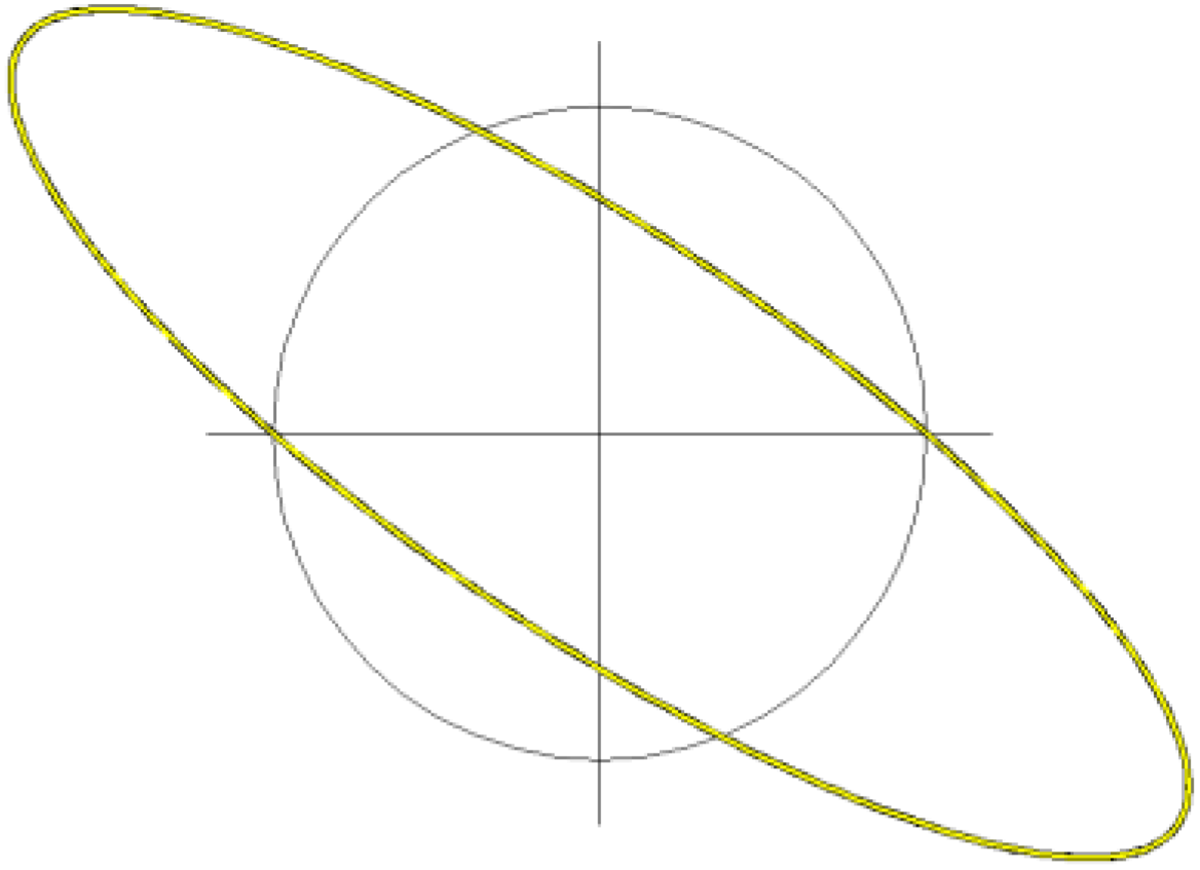
Circle.

Limacon.

Steiner curve.

Parabola.

Evolute (test 6).

Evolute (test 7).

Evolute (test 8).
The algorithm is also checked for a circle (Figure 7). The parameters are the same as for the astroid. The algorithm works, as can be seen from the figure.
The characteristic equation
Practical orientation of research
Kinematic pairs with simple travel paths are the basis for a robot design. Perhaps even Newton has in some way designed mechatronic systems with complex motion trajectories. Designing a robot with a complex trajectory of motion is possible in an approximate manner, in addition it is also possible to follow the designed trajectory of motion during the designing process.
The obtained results can be applied in the field of robotics, mainly due to its accuracy of trajectory calculation and rendering, but also by reverse validation of motion control of monitored robot effectors. The proposed model is applicable for simulation of a two-wheel self-balancing mobile robotic system or other unstable robotic vehicles with parallel wheel alignment (from a physical point of view). Robotic devices belonging to this category of robotic systems require some degree of intelligence (autonomous behavior), described in the literature as a mobile service robot. A convenient addition to the precise regulation and control of mobile service robots is the implementation of inertia navigation, which provides reverse validation and control, for example, for a tilting system implemented on a two-wheel self-balancing mobile robotic system.
Conclusion
Engineering calculations determine the functional capabilities of the mechatronic system. The main method of obtaining is approximation, that is, the inaccuracies were established down in the project before machining. Exact calculation is available for trajectories by conical sections only. Newton proposed a classification for the analytical solution of the problem for complex plane curves, but calculation methods have not yet appeared.
The main disadvantage of the previously obtained types of transformations is the study conducted on the orthogonal basis only. The transformation parameters of a complex curve depend solely on the type of transformation and the properties of space. This is the approach of the article. Initially, a new method for obtaining parameters was found only for centrally symmetric conical sections. 18,19 Further theoretical and experimental studies made it possible to substantiate the applicability of this method to Jordan curves. 20 The new method was tested in computer geometric modeling and on the trajectories of robot tests in laboratory conditions. Recent studies have made it possible to find a general calculation algorithm on a nonorthogonal basis. The method combines one type of calculation with any plane curve that describes the trajectory of the robot. The algorithm will help to reveal the meanings and practical solutions for many natural and technical sciences.
The authors believe that the development of a space application method can provide a solution for obtaining the exact trajectory of any robot. Thus, the accuracy of the robot will depend only on the accuracy of the production equipment. Combining the method with Hamiltonian mechanics can become the theoretical basis for development.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The contribution is sponsored by the project 015STU-4/2018 Specialised laboratory supported by multimedia textbook for subject “Production systems design and operation” for STU Bratislava and by the project 013TUKE-4/2019: Modern educational tools and methods for forming creativity and increasing practical skills and habits for graduates of technical university study programmes. This publication has been written thanks to support of the Operational Program Research and Innovation for the project: “Výskum pokročilých metód inteligentného spracovania informácií”, ITMS code: NFP313010T570 co-financed by the European Regional Development Found.