
Abstract
Calculation of the moving mechanism on a trajectory described by a planar differentiable curve is challenging. The difficulty arises in compliance with high-precision movement. The new method of calculation based on the intrinsic properties of the plane is proposed. The method is based on mathematical linguistics and relational algebra. First, these disciplines are applied to analyze the intrinsic properties of the Euclidean plane. Calculation of classic and new methods for moving point for the flat rod is shown for comparison. Analytical formulas for Jordan curves can be obtained in some cases. The experiments in the areas of geometric modeling and control of a robot are listed briefly. The analytic solution was obtained by nontraditional methods not only for centrally symmetric conic sections but also for Jordan curves.
Introduction
Trajectories of the mechatronic system were calculated based on the principles of Archimedean mechanism. The design is constructed of linear and circular movements, as it exists in nature. At the same time, a set of movements is a much more complex path, such as the epicycloid, hypocycloid, and so on. The accuracy of the calculation mechanism depends on the methods of geometrical control. 1 There are only approximate methods for complex differentiable curves. Let us try to provide accurate calculation methods on the basis of amendments to the analytic geometry. 2
The new branches of geometry appear by transferring the results of other mathematical sections, such as set theory, algebra, and so on, generally. Mathematics is the language with which God has written the universe. The key words in this Galileo aphorism will assume the words “language” and “write.” Let’s remove the emphasis from the word “mathematics” as has been done yet. Proof of Galileo thesis and output of similarity method by Leibniz are identical to a large extent. Hilbert formulating axioms for Euclidean plane suggested that the construction of linguistic rules must be considered. The main results in mathematical linguistics are prepared using semiotic and structural analysis. They are base solutions in the natural and formal language theory 3 and used in artificial intelligence theory sometimes. Symmetry as the basis of the similarity method and their analysis using semiotic method was applied in the research.
Convex geometry is greatly close to analytic geometry. Important practical results are obtained from its use. It is formulated by adding Zermelo-Fraenkel (ZF) axioms of set theory. The main objective of the reported studies is to get sensible results in mechatronic systems and Computer Aided Design/Computer Aided Manufacturing (CAD/CAM). Codd’s relational algebra as a practical part of ZF theory has been applied additionally. Proofs by Galileo and Leibniz are based on geometric constructions. We used mathematical linguistics to improve the accuracy of geometrical modeling in CAD/CAM, mechatronics, and so on. We obtained the Euclidean plane as text.
The table of symmetries
Hilbert formulating axioms for Euclidean plane suggested that the construction of linguistic rules must be considered. We obtained the Euclidean plane as text by analogy with semiotic analysis of drawings according Leibniz’s method of similarity. Levels of study of the text are internal relations in plane. The basic postulates used were permutation, mirror and unitary matrix symmetries by Dieudonne 4 ; table automorphisms and transfer symmetry by Weyl; definition of symmetry by Born; and binary automorphisms by Bachman.
Main attention of research was devoted to permutation symmetry. 5 The Euclidean plane is a relation table. The proof is easy, because relation algebra may be working with finite and indefinite table. The conduct of symmetry was considered by relation algebra and semiotic analysis. Application of the method to the Dieudonne automorphisms shows that binary symmetry belongs to two mathematical disciplines: set theory and universal algebra.
Extended table of Dieudonne symmetries was built on the basis of knowledge symmetry and relational algebra. The current presentation of this table is: Existing of set (A≠Ø Zermelo). Existing of relation (a1Ra2 Codd). Membership element of set (a∈A Fraenkel). Universal relation (f : Ω → Ω' implication). Linguistic description of the set (Descartes). Linguistic presentation of the relation (Descartes). Saving cardinality ( Saving power relations (n = const in Linguistic order ( Mathematical order (ai ≺ ai+1, where ai,ai+1 ∈ R Kantor). Permutation (
ai ↔ aj). Mirror (ai
·−1 = −ai
).
Since the connection between automorphisms 10 and 12 was first opened by Gilbert, the symmetry of knowledge may be named in his honor. Symmetry with numbers 1 and 2 is combined as
The linear transformations for central symmetric conic sections
Elliptic and hyperbolic trajectory can be calculated using nonprojective transformations by the classical method 6 or direct analytical method. 2,5,7 Nonprojective solutions for Jordan curves are absent.
Let there be an arbitrary figure Φ —Jordan curve in the Euclidean plane R 2 in a Cartesian coordinate system defined by the parametric equation:

where functions fx and fy (t) are piecewise continuous. If the equation’s figure is defined, it is always possible to write. Class of shapes defined only by the implicit function F(x, y) = 0 is not considered in this research. We carry out any transformation of the figure Φ defined by the matrix, where it is necessary to obtain the parameters of the transformed figure (to solve the characteristic equation).
The basis of the direct method of linear transformations is a manifestation of the adjustable symmetry, namely
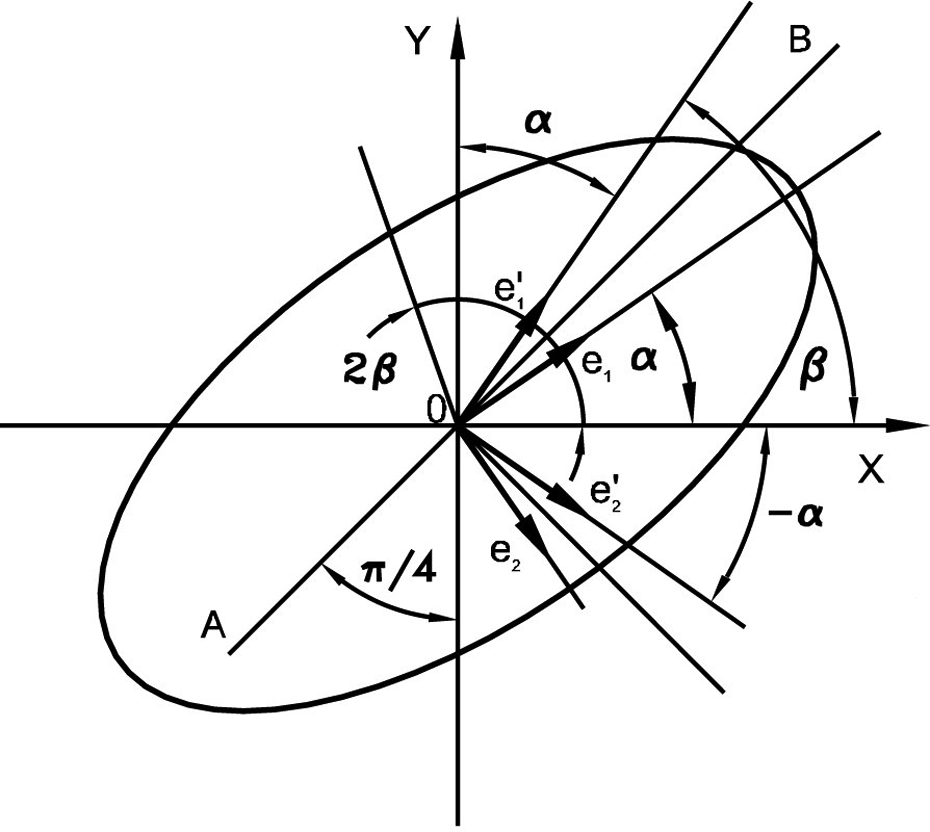
Nonorthogonal basis.

Parameters semiaxes are considered difficult in the classical method, since they represent a radical dependence.
A new direct analytical method for the linear transformation was proposed earlier. Free from radicals, it is more simple and accessible for further mathematical derivations. The method is based on the permutation symmetry and other symmetries. 7
We calculate the angle β which is symmetrical to own corner α for the system:

in the first step. The angle α is determined using the two equations:

and

Angles are equal if the calculation and transformation is correct. The coefficients λ 1 = c and λ 2 = d are equal.

and


and

The initial system will be
For example, let us consider the motion of a point located outside the axis of the flat rod. The system of equations describing the motion of the third point is
Solution classical method for the transformation matrix
Where
Application for planar differentiable curves
Unfortunately, general solution for Jordan curve could not be obtained. If the result of the calculations obtained for the systems:




For example, the system
Parameters for converting epicycloid modulo 2 with parametric system of equations
Error in transformation of epicycloid.
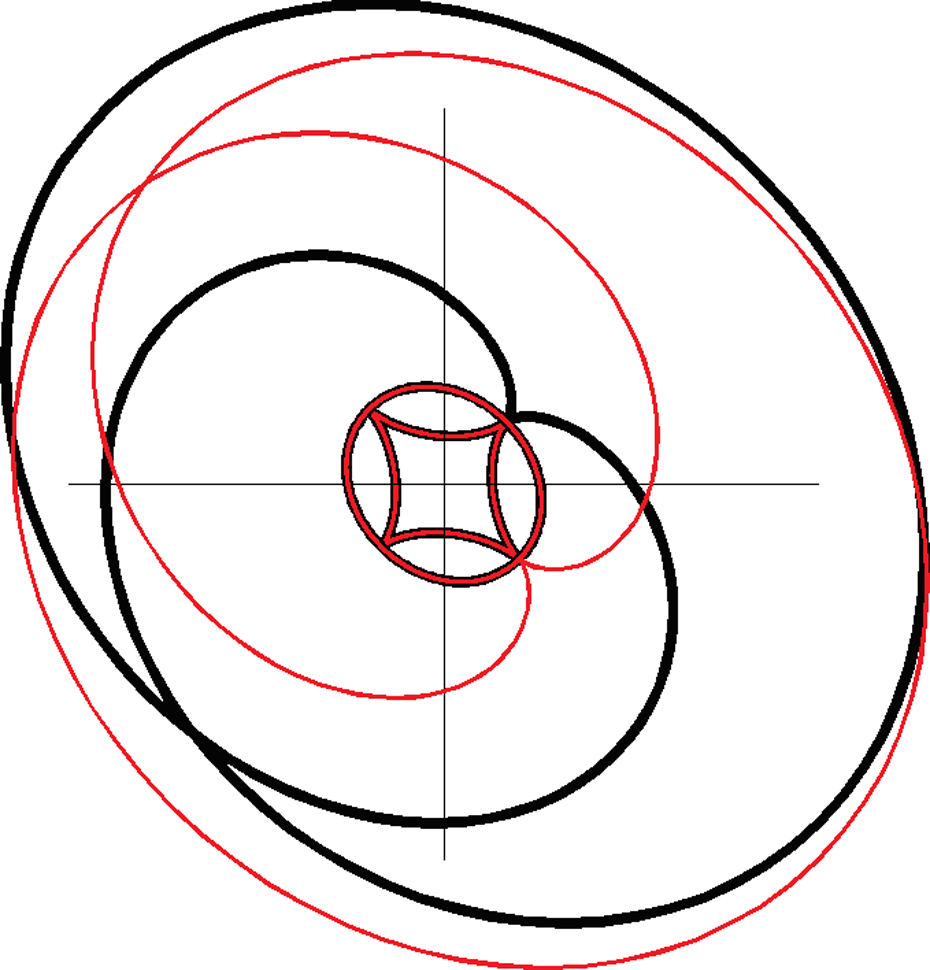
The program algorithm is quite simple: The requested transformation parameters; Asteroid, epicycloids and ellipse are output after transformation by every part of the line of it and the output is black; Forward transformation parameters; The new obtained curves are output in red.
With minimal appeals to the mathematical theory, the research method of geometric modeling will be carried out. Consider the three curves, astroid, epicycloid modulo 2, and the ellipse. The last curve is not a contradictory method of calculation. We will investigate the direct analytical method as a black box, and the results are compared with the mathematical theory.
Solution of the characteristic parametrical systems (10–13) can be different. Vector
Results of experiments.

Application for the design of robots
The circle and the ellipse are the basis for many of the kinematic mechanisms, such as a flat crank, crank, and so on. Payment mechanism causes the trajectory of its motion. 8 Detailed information as a condition of the mentioned calculations are described in detail in the monograph. 6 It is also linked to the causes of payment mechanism. The solution of differential equations can be obtained in an analytical form if the trajectory is given using the exact analytical formula.
Calculation of the trajectory of motion actuators and automatic machines with high precision is important for efficient production.
9
The calculations of the motion trajectory of the kinematic mechanisms often yield a system of parametric equations of a circle or ellipse
Experiments were carried out on the basis of the developed stand to check the adequacy of the developed mathematical model. The design of the stand was assembled from aluminum profiles, linear modules, and fasteners (RK Rose+Krieger, Minden, Germany). Simple and cheap robot (Figure 4) to move along the path of the executive body of the ellipse and the circle may be developed on the basis of the proposed mathematical model. 10 –12 Experiments have shown a difference between the theoretical and actual trajectory of less than 5%. This robot can be carved with milling cutter details in the form of an ellipse and a circle made of different materials, such as glass, metal, ceramics, and wood. The robot with laser can burn through in different materials is not necessarily circular holes. Experiments with the Jordan curves are the path of movement carried out in the laboratory plant (Figure 5).

Results of transformations from Table 1.

Robot.

Laboratory stand.
Conclusions
The characteristic parametrical system
The analytical solution for calculating is opened for the complex trajectories of the mechatronic system. Precision of designing is defined within a computer data storage and precision of machining equipment. People design symmetrical mechatronic systems as a rule. Therefore, most of mechatronic systems can be calculated using the method proposed in this article.
Analytical geometry is the simplest of the existing geometries. We have shown the possibility of obtaining exact formulas based on it, the opportunity to build robots on the mathematical theory. The calculation cannot be made for all linear parametric systems. Development of the theory will extend the class of systems, and, in turn, accurate and high-speed robots will enable designing. The stated mathematical calculation is a suitable method for determining the trajectory of mobile robots and industrial robots anywhere. It is necessary to follow the programmed process of the trajectory with extremely high precision. They are mainly engineering technologies, material handling in precise manufacturing process as well as electrical engineering and the fabrication of new products by advanced printing methods.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The contribution is sponsored by VEGA MŠ SR No 1/0367/15 prepared project “Research and development of a new autonomous system for checking a trajectory of a robot” and project KEGA MŠ SR No 006STU-4/2015 prepared project University textbook “The means of automated production” by interactive multimedia format for STU Bratislava and Kosice. The article was supported by the VEGA 1/0477/14 project “Research of influence of selected characteristics of machining process on achieved quality of machined surface and problem free assembly using high technologies” supported by the scientific grant agency of the Ministry of Education of the Slovak Republic and of Slovak Academy of Sciences. This publication is the result of implementation of the project: “UNIVERSITY SCIENTIFIC PARK: CAMPUS MTF STU - CAMBO” (ITMS: 26220220179) supported by the Research & Development Operational Program funded by the EFRR. This contribution is also supported by the Operational Project Research and Development of Centre of Excellence of Five Axis Machining, ITMS 26220120013, co-financed by the European Funds for Regional Development and supported by Minobrnauki of Russian Federation, Grant GZ/TVG 14.