
Abstract
This article introduces time-efficient path planning algorithms handling both path length and safety within a reasonable computational time. The path is planned considering the robot’s size so that as the robot traverses the constructed path, it doesn’t collide with an obstacle boundary. This article introduces two virtual robots deploying virtual nodes which discretize the obstacle-free space into a topological map. Using the topological map, the planner generates a safe and near-optimal path within a reasonable computational time. It is proved that our planner finds a safe path to the goal in finite time. Using MATLAB simulations, we verify the effectiveness of our path planning algorithms by comparing it with the rapidly-exploring random tree (RRT)-star algorithm in three-dimensional environments.
Introduction
Safe path planning is important for autonomous vehicle navigation. For real-time applications, it is required that a path planner finds a safe solution path within a reasonable amount of time. This article introduces novel path planning algorithms handling both path length and safety within a reasonable computational time.
There are many papers on path planning of an autonomous vehicle. 1 –7 A-star or Dijkstra algorithms 1 –3 divide the workspace into multiple grid cells. As the workspace size increases, the number of grid cells required to represent the workspace also increases. It is well-known that the computational load of the A-star or Dijkstra algorithms increases considerably as we increase grid sizes or environment complexity. Thus, computing a path using A-star or Dijkstra algorithms in a large complex environment may not be feasible.
A-star or Dijkstra algorithms use grids with blocked and unblocked cells to represent terrain. However, paths formed by grid edges can be suboptimal and unrealistic looking, since the possible headings are artificially constrained. Thus, 8,9 presented any-angle path planning on grids such that paths are not constrained to grid edges.
The original A-star algorithm was later further extended to bidirectional A-star search, 10,11 where two separate unidirectional A-star searches are carried out simultaneously from both the start and the goal. A forward A-star search is carried out from the start toward the goal, while a backward A-star search is carried out from the goal toward the start.
There are many path planning methods which are used in environments without grid cells. 4,5,12 –21 For instance, a Voronoi diagram can be used to build a safe path for a robot in two dimensions. 12 –19,22 However, a Voronoi diagram path may be unnecessarily long, especially in a situation where a passage between two obstacles is too wide.
Many path planning algorithms, such as RRT-star, 4,5 used random sampling to generate a path in environments without grid cells. RRT-star approaches can easily handle three-dimensional (3-D) space and nonholonomic constraints, such as robot arm manipulators and steering. 20 The solution constructed by RRT-star converges to the optimum solution asymptotically by spending infinite time. 5 However, waiting for infinite time is not possible in practice. This inspired us to develop path planning algorithms which can generate a near-optimal path within a reasonable amount of time.
Recall that paths formed by grid edges can be suboptimal and unrealistic looking, since the possible headings are artificially constrained. 8,9 This problem doesn’t occur in the proposed approach, since we consider path planning which doesn’t require grid cells. This article introduces novel path planning algorithms handling both path length and safety within a reasonable computational time.
In the literature on robotics, there are many papers on multi-robot systems. 23 –36 Coordinating multiple robots can be utilized in many tasks, such as sensor network building, surveillance, exploration, intruder capture, rendezvous, or formation control.
The proposed path planning method was developed inspired by multi-robot networking algorithms in the study by Kim. 18,19,23,37 The purpose of the work by Kim 18,19,23,37 was to use multiple robots deploying nodes so that the complete network is built as fast as possible. The major distinction from the work by Kim 18,19,23,37 is that this article handles building a safe path to the goal as fast as possible. Another distinction from the work by Kim 18,19,23,37 is that this article considers virtual robots which can move with infinite speed. Note that a real robot cannot move with infinite speed. However, a virtual robot can move with infinite speed, since a virtual robot exists in simulations and is used to build a path using simulations.
Among many papers on path planning of robots, our approach is novel in using unique concepts, such as virtual robots and virtual nodes. Initially, two virtual robots are deployed at the goal and the start, respectively. A forward search by one virtual robot is carried out from the start toward the goal, while a backward search by another virtual robot is carried out from the goal toward the start. This bidirectional search is developed inspired by bidirectional A-star search in the literature. 10,11
Once two virtual robots are deployed, then they keep deploying virtual nodes which discretize the obstacle-free space into a topological map. In other words, the virtual robots deploy virtual nodes so that the network structure, called the traversible graph, can be built in the environments. Here, traversible graph satisfies that an edge in the graph can be traversed by a robot safely without collision, since the edge is not blocked by an obstacle.
Once the traversible graph is built, then we search for a shortest path between the start and the goal using the graph. This way, our planner generates a safe and near-optimal path within a reasonable computational time. We plan a path considering the robot’s size so that as the robot traverses the constructed path, it doesn’t collide with an obstacle.
In the literature, 4,5,20 tree may expand randomly to any direction, not toward the goal directly. However, this random expansion may slow down the process of finding a path to the goal. A-star algorithms use heuristics to guide its search toward the goal. The proposed path plan strategy is similar to A-star algorithms, 1 since under our approach, a virtual robot tries to move toward its destination directly if it is possible. This direct movement is used to find a path between the start and the goal in a time-efficient manner.
It is proved that our planner based on two virtual robots generates a safe path to the goal in finite time. Using MATLAB simulations, we verify the effectiveness of our path planning algorithms by comparing it with the RRT-star algorithm in 3-D environments.
The organization of this article is as follows. The second section introduces assumptions and definitions. The third section presents our path planning algorithms using virtual robots. The fourth section shows simulation results to verify the effectiveness of our algorithms. The fifth section provides conclusions.
Assumptions and definitions
We consider a workspace with obstacles. Let goal denote a point in an obstacle-free space. Let us assume that the location of the goal is known to a robot. The problem to be solved in this article is as follows: build a safe path from the start to the goal so that a robot can arrive at the goal as fast as possible while avoiding collision.
Consider the case in which we build a safe path for a robot whose size can be approximated as a sphere with radius r. We use two virtual robots, R
1 and R
2, in order to plan the path of the real robot. Here, Ri
, where
R 1 starts from the start point, and R 2 starts from the goal point. R 1 searches for a path to the goal point, and R 2 searchers for a path to the start point. The goal point is set as the destination of R 1. Also, the start point is set as the destination of R 2.
We say that Ri
collides with an obstacle in the case where the sphere, centered at
Let
We say that
Ri
iteratively deploys virtual nodes on its way so that the connected network is built. Virtual nodes discretize the obstacle-free space into a topological map. Each virtual node has spherical sensing coverage with radius
It is assumed that in the case where a node detects another node, the two nodes can communicate with each other. This implies that the communication range is longer than the sensing range. This assumption was also used in the study by Kim. 18,19,37 Also, the communication and sensing abilities of a node begin working once the node is deployed. This approach of using robots deploying nodes is inspired by multi-robot networking algorithms in the study by Kim. 18,19,37
Recall that Ri
iteratively deploys virtual nodes on its way so that the connected network is built. Let the traversible graph Ii
be defined by a set
Every vertex in
Nc is a tuning parameter for our path planning. As Nc increases, the graph Ii becomes denser by having more edges. As the graph becomes denser, we can find a shorter path using the graph Ii .
See Figure 1 for an illustration. This figure depicts Ii
as Nc
varies. In the case where

This figure depicts Ii
as Nc
varies. In the case where
Since an edge in
Suppose that
Once the combined graph is built, then we say that I
1 and I
2 are connected to each other. We also say that
Recall that each virtual node has spherical sensing coverage with radius
Some points on the coverBoundary of n exist on obstacle boundaries, since a sensor ray of n can be blocked by an obstacle. In the case where the sensors of the node n detect no obstacles, the footprint becomes the sphere whose center corresponds to n and the radius of which is
An openSpace of n denotes the set of points on the coverBoundary of n, which are not on obstacle boundaries. An openFront of n is the subset of an openSpace such that all points on the openFront are not inside a footPrint of any other node. In the case where every node has no openFront, the footPrints of all nodes cover the entire workspace.
We need to simulate a node n emitting many sensor rays surrounding n. Suppose that the virtual node n emits q 2 sensor rays surrounding n to detect a nearby obstacle. Here, q is a positive integer. Then, we generate q 2 points on the coverBoundary of n. As q increases, we obtain densely spaced points on the coverBoundary.
Suppose that a node n emits q 2 sensor rays surrounding n to detect a nearby obstacle. Then, q 2 points are generated on the coverBoundary of n. We use this generation method in our MATLAB simulations (see the “Simulation results” section).
Consider a unit vector
Then, we rotate the resulting vector by one angle among
The resulting vector after two rotations is


Let

Here,

Otherwise, we set

Here,
Recall that both ψ and θ are selected from q values, respectively. Thus, in total, q 2 points are generated using equation (5).
See Figure 2 for an illustration of

An illustration of
Let
Recall that

Recall that

For the virtual robot
Ri
.


The above condition implies that Ri
doesn’t collide with an obstacle boundary while Ri
moves from n to any point in
Path planning
A time-efficient path planning algorithm is presented in Algorithm 1. This section presents the algorithm in detail.
Algorithm 1 iterates until a node in I
1 is connected to a node in I
2. Once I
1 is connected to I
2, then we generate a new combined graph
Figure 3 illustrates Ri
deploying a new node. In this figure, Ri
is a sphere-shaped robot. The robot moves inside a tunnel in this figure. The tunnel boundaries are depicted with red curves, and the trajectory of the robot is depicted with a yellow curve. The large dots on the trajectory of the robot indicate the nodes deployed by the robot. The maximum sensing range of each node is depicted as a dotted sphere with radius
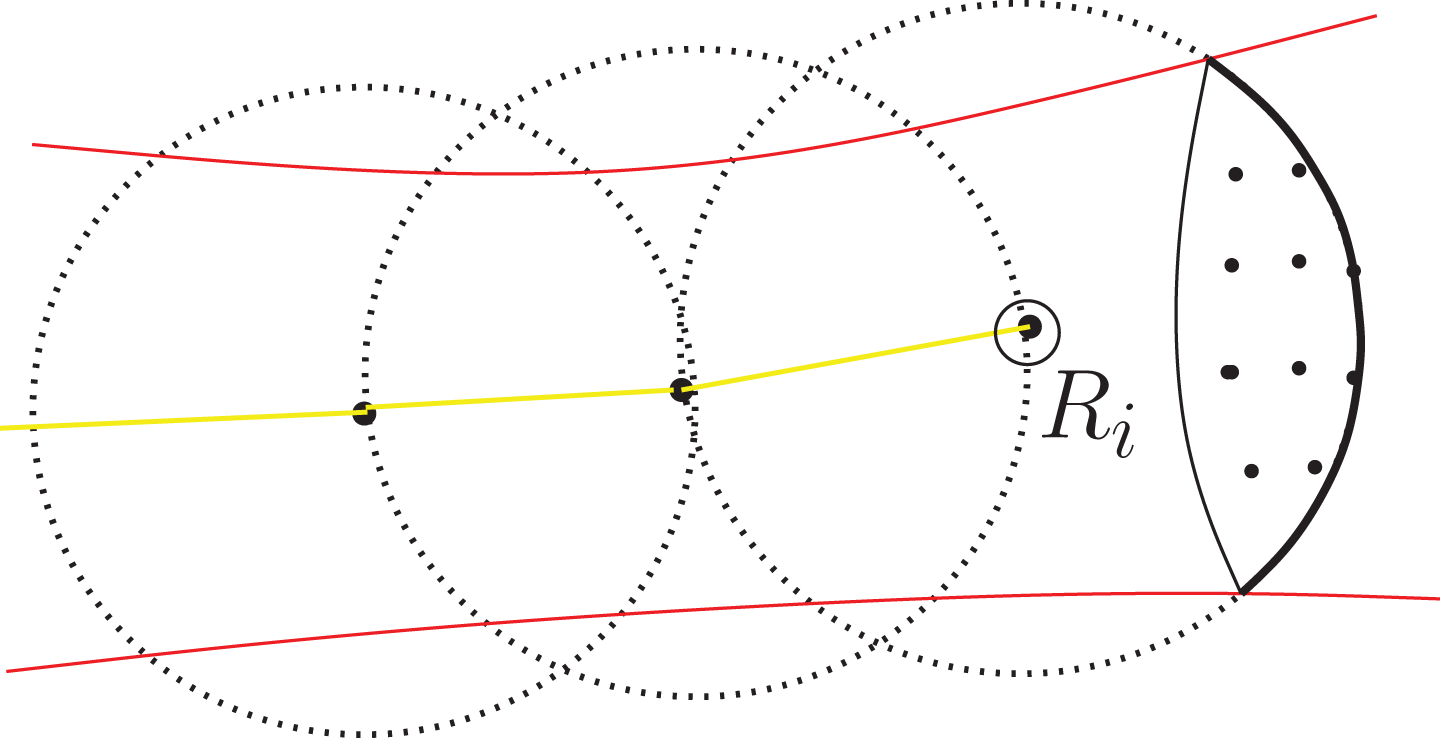
Ri
deploying a new node. The maximum sensing range of each node is depicted as a dotted sphere with radius
Using Ii
, Ri
searches for a node, say
Let
Since we select a random FrontierPoint, the path plan result changes as we run Algorithm 1 multiple times. This random selection is presented in Algorithm 3, which is a sub-algorithm of Algorithm 1. Once
Ri
.


Ri visits the closestPoint(i) of n before visiting other FrontierPoints of n. In other words, Ri moves toward its destination directly if it is possible. This direct movement is used to search for a feasible path in a time-efficient manner.
This movement toward the destination distinguishes our article from tree expansion strategies in the literature. 4,5,20 In the literature, 4,5,20 tree may expand randomly to any direction, not toward the goal directly. Since Ri moves toward its destination directly if it is possible, the computational efficiency of our path plan strategy increases considerably. The proposed path plan strategy is similar to A-star algorithms, 1 since A-star algorithms use heuristics to guide its search toward the goal.
Once Ri
reaches
Algorithm 4 presents the path planning from the start to the goal using the traversible graph I. We use the Dijkstra algorithm which finds the shortest path along the traversible graph I. (The Dijkstra algorithm is optimal in finding the shortest path. The A-star algorithm uses a heuristic function to guide its search toward the goal. As far as the authors know, the A-star is suboptimal in finding the shortest path, due to this heuristic function.)
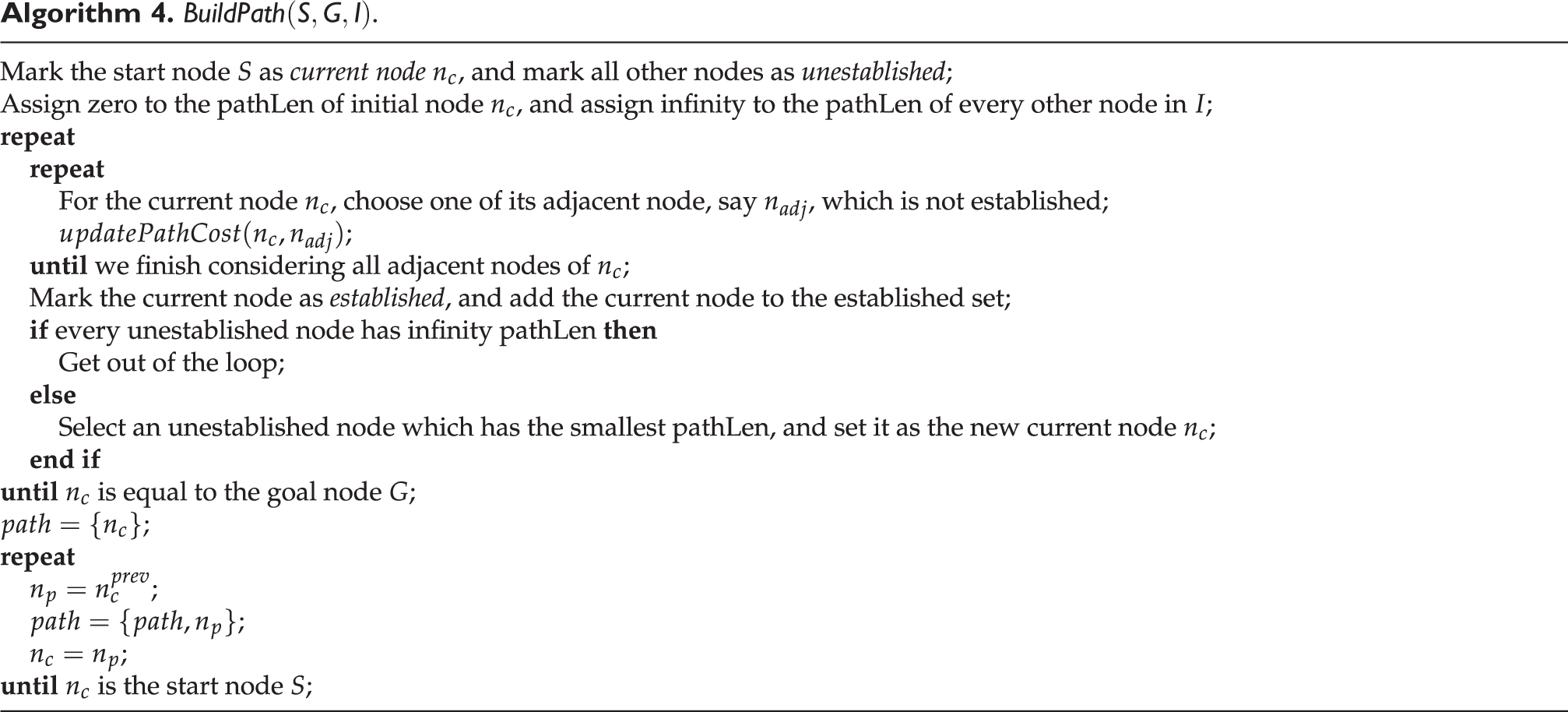

We explain Algorithm 4 briefly. Recall that two nodes n
1 and n
2 are adjacent in the case where
The pathLen of a shortest path, say

Equation (10) results in




which is presented in Algorithm 5.
Analysis
In this subsection, we analyze the performance of our algorithms theoretically.
Recall the definition of FrontierPoints as follows. Among
For this analysis, we consider the case where a sensor coverage is infinitesimally small (
The following theorem proves that in the case where Ri cannot find an openFront, the entire obstacle-free space is covered by footPrints.
Theorem 1
In the case where Ri cannot find an openFront, the entire obstacle-free space is covered by footPrints.
Proof
Using the transposition rule, we prove the following statement: in the case where an obstacle-free space, which is not covered by footPrints, exists, then Ri can find an openFront.□
Suppose that an obstacle-free space, which is not covered by footPrints, exists. Let O denote this uncovered obstacle-free space. According to the definition of an openFront, at least one node has an openFront along the boundary of O. Thus, Ri can find this openFront.
Theorem 1 implies that in the case where Ri cannot find an openFront, the entire obstacle-free space is covered by footPrints. Thus, I 1 and I 2 are connected to each other before Ri cannot find an openFront. This implies that Algorithm 1 proceeds until I 1 and I 2 are connected to each other.
Theorem 2 proves that the real robot doesn’t collide with an obstacle boundary as it traverses edges in
Theorem 2
As the real robot traverses edges in I, it doesn’t collide with an obstacle boundary.
Proof
Using the definition of I, every edge, say
The real robot doesn’t collide with an obstacle boundary as it traverses the path built using Algorithm 1. In Algorithm 1, Algorithm 4 generates a path to the goal using the traversible graph I. While the real robot traverses edges of I until meeting the goal, the robot doesn’t collide with an obstacle boundary using Theorem 2.
Simulation results
This section verifies the performance of Algorithm 1 using extensive simulations. The real robot’s initial position is
We compare the proposed algorithm with the RRT-star algorithm in the study by Sertac and Emilio. 5 The settings of the RRT-star algorithm are as follows. Two nodes are neighbors in the case where the distance between the two nodes is smaller than 10 distance units. The step size (expansion of the tree within one time step) in the RRT-star algorithm is set as 10 distance units.
The solution constructed by the RRT-star algorithm converges to the optimum solution asymptotically by spending infinite amount of time. 5 Since we cannot wait for infinite time, we finish the RRT-star algorithm in the case where the relative distance between the constructed node and the goal position is smaller than 10 distance units.
Fifty Monte-Carlo simulations are implemented to verify the performance of our method rigorously. This article uses two metrics for comparison with the RRT-star algorithm. The first metric is the computational time. Let
In Algorithm 3, we randomly select one FrontierPoint of n as
Figure 4. depicts the cluttered environment considered in the simulations. Each obstacle has a spherical shape.
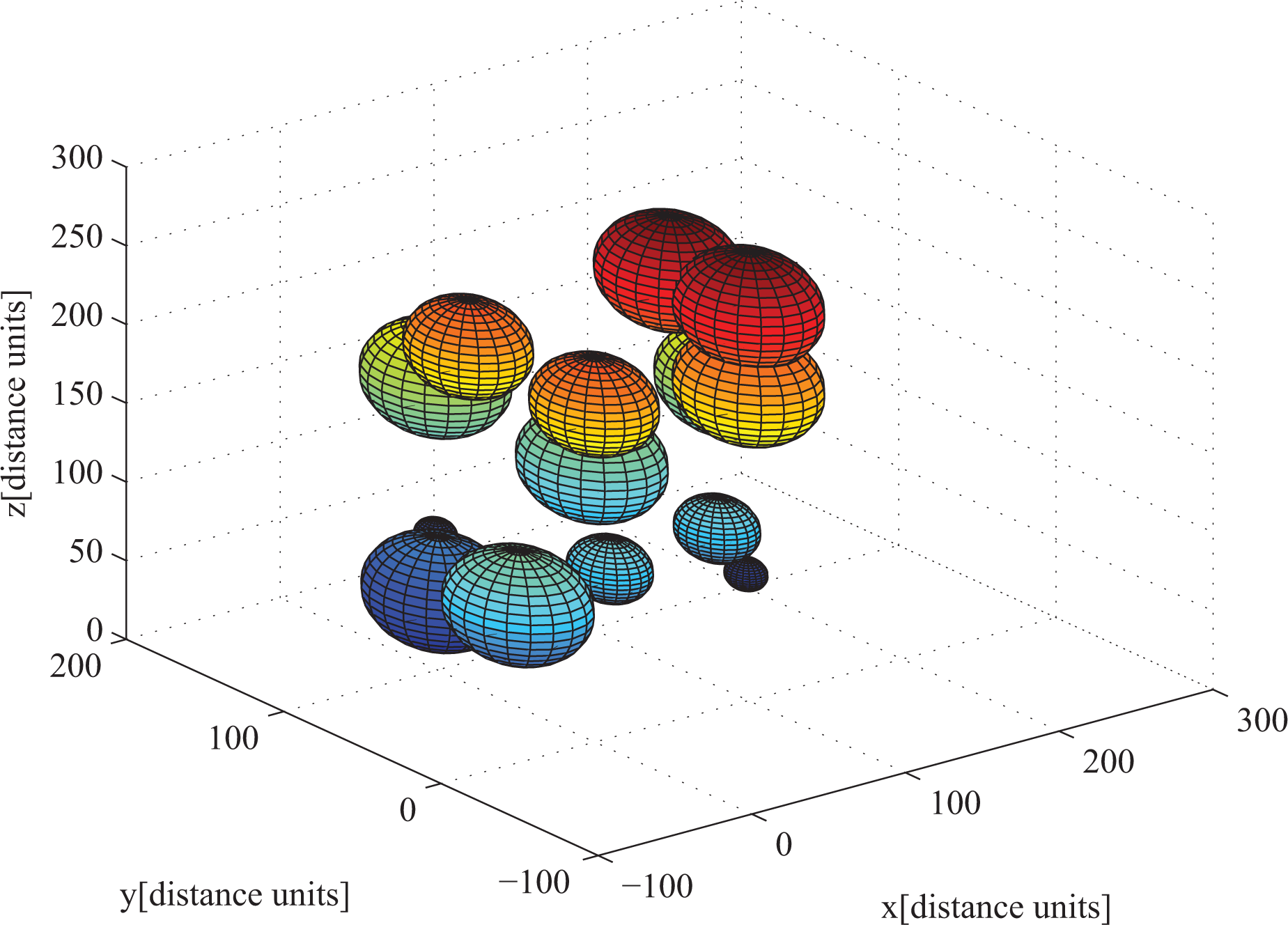
Each obstacle has a spherical shape.
Table 2 presents the analysis of both the proposed method (Algorithm 1) and the RRT-star. In the proposed planning method, we set
The effect of changing
This subsection presents the effect of changing
The analysis of both the proposed method and the RRT-star.

Path plan strategy.


The effect of changing

Conclusions
This article introduces novel path planning algorithms handling both path length and safety within a reasonable computational time. The proposed planner is based on unique concepts such as virtual robots and virtual nodes.
Initially, two virtual robots are deployed at the goal and the start, respectively. A forward search by one virtual robot is carried out from the start toward the goal, while a backward search by another virtual robot is carried out from the goal toward the start.
Two virtual robots deploy virtual nodes which discretize the obstacle-free space into a topological map. Using the topological map, the planner generates a safe and near-optimal path within a reasonable computational time. It is proved that our planner finds a safe path to the goal in finite time.
Using MATLAB simulations, we verify the effectiveness of our path planning algorithms by comparing it with the RRT-star algorithm. As our future works, we will do experiments using autonomous aerial vehicles to verify the effectiveness of the proposed approach.
The proposed planning method can be applied in two-dimensional (2-D) environments, as well as in 3-D environments. In 2-D environments, a virtual robot has a circular shape instead of spherical shape. Also, sensor coverage is depicted as a circle in 2-D case. In 2-D environments, FrontierPoints are generated on circles, instead of spheres. Then, the path plan algorithms in this article can still be applied.
As our future works, we will extend the proposed planning method to the path planning of an industrial robot arm. There are many papers on the path planning of an industrial robot arm.
38
–45
For a robot with d degrees-of-freedom (DOF), the configuration space (c-space) represents each DOF as a dimension in its coordinate system. Each d-dimensional point in the c-space represents the d joint angles of the robot. Due to this property, motion planning in the c-space is simpler than that in geometric spaces. A motion planning task involves connecting two points in the c-space, with obstacles mapping from the Cartesian space to the c-space using forward-kinematic collision checks.
46
Once the c-space is given, then the proposed planning method, which is extended to d dimensional space, can be applied to search for a safe path in the c-space. The extension of the proposed planning method to
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Research Foundation (NRF) of Korea grant funded by the Korea government (MSIT) (no. 2019057282).