
Abstract
Aiming to improve the positioning accuracy of vehicle integrated navigation system (strapdown inertial navigation system/Global Positioning System) when Global Positioning System signal is blocked, a mixed prediction method combined with radial basis function neural network, time series analysis, and unscented Kalman filter algorithms is proposed. The method is composed by dual modes of radial basis function neural network training and prediction. When Global Positioning System works properly, radial basis function neural network and time series analysis are trained by the error between Global Positioning System and strapdown inertial navigation system. Furthermore, the predicted values of both radial basis function neural network and time series analysis are applied to unscented Kalman filter measurement updates during Global Positioning System outages. The performance of this method is verified by computer simulation. The simulation results indicated that the proposed method can provide higher positioning precision than unscented Kalman filter, especially when Global Positioning System signal temporary outages occur.
Keywords
Introduction
The vehicle integrated navigation systems commonly consist of two navigation technologies: strapdown inertial navigation system (SINS) and Global Positioning System (GPS). SINS is a self-contained system, which measure angular rates and accelerations by three orthogonal gyroscopes and three orthogonal accelerometers. It can provide attitude, velocity, and position information of vehicles through mathematical transformation. However, during the measurement process, the system error accumulates with time. GPS is a satellite-based radio navigation system, it can provide accurate positioning information for a long period of time when no less than four satellites in sight. When vehicles moving through highway tunnel, urban areas, or dense foliage, the GPS signal is easily lost. In order to break through the problems of SINS and GPS on their own, SINS/GPS integration algorithm using Kalman filter (KF) is proposed to provide high-precision navigation information. GPS serves as external measurement to offset inertial navigation system (INS) errors.
Kalman filter is normally regard as the standard information fusion algorithm for SINS/GPS integration navigation system with Gaussian noises. However, When GPS outages happen, KF relies merely on the system error model and the past information, cause the SINS errors accumulate during long-term GPS signal outages. Aiming to improve the restriction of KF, researchers inquire into substitutive solutions of SINS/GPS integration navigation system, principally base on the artificial intelligence (AI). 1 When GPS signal is receiving well, the AI is trained by the outputs of SINS/GPS integration navigation system. When GPS signal is blocked, the trained AI will correct INS errors to insure the position precision.
Researchers proposed many different approaches that apply in different cases. Jwo et al. proposed a method based on radial basis function network and particle swarm optimization to predict errors and filter high-frequency noise. 2 The method can realize the online identification of nonlinear dynamic errors, so as to compensate modeling errors. The performance has been greatly improved compared with Kalman filter. Wang et al. proposed methods combine with adaptive Kalman filter and neural network, which aim to predict the errors and reduce estimation noise. 3 Neural network aided adaptive Kalman filter (AKF) to complete covariance matching and make the relationship between covariance and corresponding character map to the corresponding image. The proposed method uses both the training results of neural network and the updated covariance to adjust AKF. The method can reduce the estimation noise and keep the ergodicity of the selected samples. But these two methods above didn’t consider the situation when GPS signal outages.
Malleswaran et al. presented the Evolutionary Algorithm-based Recurrent Neural Network to improve the position precision of navigation system. 4 The method based on recursive neural network combines genetic algorithm and particle swarm optimization and other evolutionary learning algorithms. The network can operate in training mode and predictive mode, it receives longitude, latitude, and attitude information from INS mechanization. When GPS signal is available, the neural network uses the synaptic weights to accumulate the acquired navigation knowledge. The estimation error will continuously reduce during the learning process of neural network, so as to obtain the optimal network parameters. They provide the performance or the proposed neural network by simulation and experiment. Xu et al. proposed a hybrid positioning method, which includes a new parallel-dual-H ∞ filter and an extreme learning machine module with good generalization ability. 5 The method solves the problems of GPS interruption and uncertain nonlinear drift of micro-electromechanical systems (MEMS) INS. The performance of the proposed method is proved by different road experiments. However, these two algorithms above only measured positioning accuracy without assessing the velocity precision.
Yao et al. proposed a new robust least squares support vector machine assisted fusion method to maintain high precision of GPS/INS integration navigation system when GPS outages. 6 The method establishes the relationship between yaw, specific force, velocity, and position increment. The algorithm assigns different weights to different data so that the system is not affected by outliers. The comparison results show that this algorithm can effectively provide the location correction during GPS signal outages, which is superior to the traditional least squares support vector machine method. Belhajem et al. proposed a hybrid method consist of EKF and neural network to improve the real-time positioning performance of the vehicle. 7 When GPS signals are available, the neural network learn the position error according to trained on different dynamics and interrupt times, so as to correct the prediction of future EKF during GPS signal interruption. The test results shows that the position accuracy of the hybrid method is higher than traditional EKF. Nevertheless, the two methods above did not consider to compensate the forecast error of neural network.
Some of the methods discussed above did not provide solutions to guarantee the positioning accuracy when navigation system could not capture GPS signals. The others were did not assess the velocity accuracy, furthermore, they did not consider to adjust the prediction error of neural network. Aiming to provide good performance to the navigation system, this article propose a hybrid prediction method to assist unscented Kalman filter (UKF) when GPS signal temporary outages occur. When GPS signal is available, radial basis function neural network (RBFNN) are trained by angular rate of gyroscope and specific force information of accelerometer and both position and velocity errors between SINS and GPS, time series analysis (TSA) are trained by the differences of position and velocity between SINS/GPS integration navigation system and the outputs of RBFNN. When GPS outages happen, the prediction of position and velocity errors by both RBFNN and TSA are provided to correct SINS errors, make sure the good performance of navigation system. This method has been simulated and verified on MATLAB by using vehicle simulation data. Meanwhile, the proposed algorithm were compared with UKF, and the result errors were analyzed.
Algorithms description
The algorithms proposed in this article is applied for SINS/GPS loosely coupled integrated system. The state equation and measurement equation are given as follows 8
where the X represents the navigation system state vector; F represents system matrix; W represents the system noise vector. Z represents measurement vector; H represents measurement matrix; V represents the measurement noise vector. The state vector X has 15 variates and is set as follows 9

in which
Measurement vector Z is defined as follows

where
The commonly data fusion method is the optimum estimation based on Kalman filter. KF algorithm is a linear minimum variance estimation method, which essence is to obtain the optimal solution of Bayesian estimation by using recursive algorithm. KF is the optimal estimation method of linear problem, but it is limited to the state estimation of linear system. 10,11 The properties of SINS/GPS integrated navigation system is nonlinearity. However, Kalman filter directly treated the system model as a linear model, which will bring large errors, affecting the performance of the whole system. Furthermore, Kalman filter will appear divergence phenomenon with the increase of filtering time. The UKF algorithm was adopted in this article to solve the nonlinear and filter volatilization problems.
The basic principle of UKF is based on unscented transformation (UT), which uses a set of deterministic sampling points to approximate the posterior probability density. 12 The transform process is given as follows: 13,14
Suppose the nonlinear transformation is






in which
The mean value and variance of y can be acquired by the following formulas



The calculation process of UKF includes two stages: prediction and update. The prediction process is depended on dynamic error model and past information, and update process is accomplished by external measurement data. UKF outputs the differences of between GPS and SINS measurements, and used the output results to revise the INS errors. UKF outputs the differences between GPS and SINS measurements, which is used to revise the INS errors.
RBF neural network
There are many different neural network applied to predict system state, such as wavelet neural network, RBFNN, back propagation neural network, and adaptive resonance theory neural network. 15 –17 Compared with the other neural networks previously mentioned, RBF model has faster learning speed than the other models, and it is simple to design, furthermore, it doesn’t have the local minima problems and do not suffer from paralysis pathologies. Therefore, RBFNN has been extensive used in prediction.
RBFNN operation principle is use the distance between the input vector and a reference vector RBF is a function to activate the corresponding hidden unit by using the distance between the input vector and a reference vector to activate the corresponding hidden unit. RBFNN get the radial basis functions by the previous input and output message and calculate the current output by the current input and the radial basis functions. 18 –20 The characteristic of RBF is that its response increases or decreases monotonically with the distance between the center reference vector and the input sample vector.
RBFNN is a three-layer forward neural network, the basic components include (1) input layer; (2) hidden layer; and (3) output layer. The structure of RBFNN is shown in Figure 1. The function of the input layer is to transfer the input sample to the hidden layer without any data processing of the input sample. When the difference between the input sample and the reference vector is below the specified threshold range, the hidden layer makes nonlinear transformation of the input data. The function of the output layer is to perform the linear transformation from the hidden layer to the output space. 21

Schematic diagram of RBFNN. RBFNN: radial basis function neural network.
The activation function of RBFNN hidden layer generally adopts Gaussian function, which is given as

where
RBFNN output is the linear combination of hidden layer neuron output, which is given as follows

where
The function of RBFNN is to realize nonlinear mapping from M-dimensional input space to N-dimensional output space through P-dimensional hidden space. The establishment of RBFNN model needs four parameters, the number of hidden nodes P, the center reference vector rj , the width dj of Gaussian function, and weight vector Wi of output layer. The hidden node number P can be figured out by repeated experiments. In this article, self-organizing clustering algorithm is adopted to train RBFNN parameters. The algorithm includes two steps: the first step is calculate rj and dj by K-means clustering algorithm. In order to avoid too flat or too sharp of each RBF function, we defined the dj as 22

where
Most strategy of GPS/SINS integrated navigation realize by GPS aiding SINS position. As is well-known, the main sources of the position error and velocity error of SINS are caused by the inertial sensor errors,
23
and they also in connection with the measurement vector Z. In this article, we use the angular velocity
Time series analysis
There are errors between the RBFNN prediction result
This article selects auto-regressive (AR) model as the TSA model to predict the residual error

Modeling process of AR model. AR: auto-regressive.
The AR model is defined as follows

where
The most commonly used method of estimating the AR coefficient is least square method. Using the least square method to estimate parameters doesn’t need much priori knowledge, which has smaller amount of calculation and simple arithmetic, it also gives good convergent results.
25,26
The residual sequence is given as

The least squares solution of AR coefficient B can be acquired from equation (18) as follows

where

The imitative effect of AR model in connection with the order q. On the one hand, using high-order of AR model fitting to the residual
Based on the information theory, H Akaike, a famous professor of statistics in Japan, put forward the AIC by weighing the applicability and complexity of the model comprehensively. AIC function is defined as

where L is the maximum likelihood function of AR model. Because of the model order with the minimum AIC value is the most suitable one, the order q is set to 5, and the sample number is set to 20.
Structure of the proposed model
The proposed system can work in two modes: training mode and prediction mode. The operational process of the proposed model is trained RBFNN and TSA when GPS signal is available, and use the predict value of both RBFNN and TSA to compensating the errors of integration navigation system when GPS outages.
When GPS signal comes with good reception, the error Z between GPS measurements

Block diagram of the proposed system when GPS signal available. GPS: Global Positioning System.
When GPS signal is blocked, the proposed method works in prediction model. RBFNN regard the angular velocity of gyro and accelerated velocity of accelerometer as the inputs to obtain the prediction value

Block diagram of the proposed system when GPS outages. GPS: Global Positioning System.
Experiment and analysis
Experimental setup
In this experiment, the trajectory data are created by MATLAB simulated program according to the vehicle driving characteristics. The main parameter of the simulated system, including initial error of system, each correlated error of SIMU and GPS, which is set as Table 1.
Specifications of simulation model.
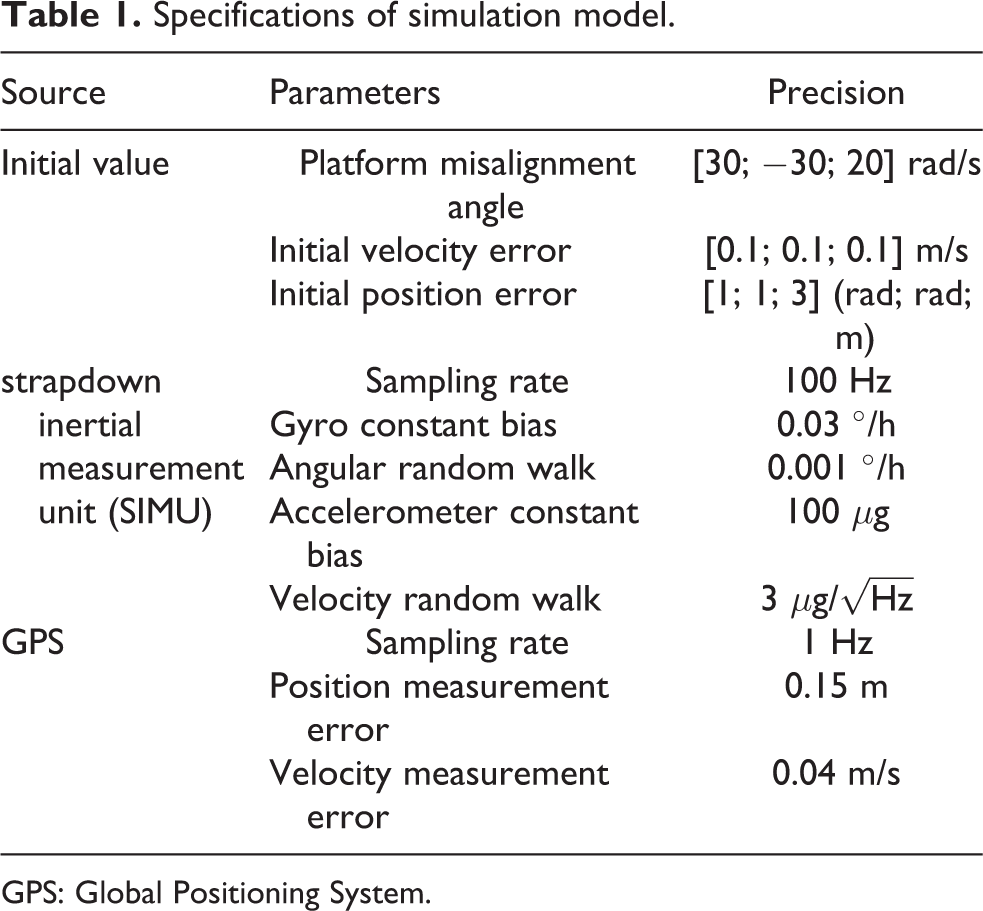
GPS: Global Positioning System.
The location of the vehicle simulation experimental is set in Harbin, China. In order to investigate the effect of information fusion method with different locked-out time, five GPS outages are selected in the whole trajectory, the GPS blocked time span is set 50 s, 100 s, 300 s, 500 s, 800 s, respectively. Both the vehicle trajectory and the starting and ending time of each GPS signal outages is shown as Figure 5.

Trajectory of the vehicle.
Experiment and result analysis
In order to testify the effectiveness of the proposed method, we adopt three different data fusion method to process the same trajectory data and same GPS signal blocking segments (4000–4050 s, 6100–6200 s, 7500–7800 s, 9800–10,300 s, 11,800–12,600 s). The evaluation criteria of the three data fusion methods is the positioning error and velocity error during GPS outages, so that the one with the minimum error is the optimal method. The three composite method are UKF method, RBFNN assist UKF method, both RBFNN and TSA assist UKF method, respectively.
The latitude error

Latitude error during GPS outages. GPS: Global Positioning System.

Longitude error during GPS outages. GPS: Global Positioning System.

East velocity error during GPS outages. GPS: Global Positioning System.

North velocity error during GPS outages. GPS: Global Positioning System.
Comparing with the UKF method, the positioning accuracy of RBFNN assist UKF method have certain enhancement. RBFNN build the nonlinear model of the position error and the velocity error between SINS and GPS. The predict value of RBFNN is used for system error correction. Nevertheless, the prediction of RBFNN completely dependent on historical data, the prediction accuracy is decreases with time, and the prediction error increase rapidly during long-term GPS signal outages (800 s).
The proposed method introduce TSA to predict the residual between Z and
To process the whole 16,235 sample data (sampling frequency: 1 Hz), UKF method spend 188.85 s, RBFNN assist UKF method spend 233.87 s, the proposed method spend 237.80 s. Compared with the trajectory length, the increase time between the proposed method and UKF method could be ignored. This shows, the proposed method dose not impact the computing speed of the integration navigation system.
Table 2 shows the root-mean-square (RMS) error and maximum error of position and velocity during GPS outages. As seen from the Table 2, both RMS error and maximum error of the proposed mixed prediction method are less than the other two methods during various GPS outages. Especially, during 800 s long outages, the RMS latitude error of UKF method and RBFNN assist UKF method are 698.217 m and 416.831 m, respectively, while the RMS latitude error of the proposed mixed prediction method is 167.361 m. The maximum latitude error of UKF method and RBFNN assist UKF method are 1527.105 m, 1000.037 m respectively, while the maximum error of the proposed mixed prediction method is 398.145 m.
RMS error and maximum error of position and velocity during GPS outages.

RMS: root-mean-square; UKF: unscented Kalman filter; RBF: radial basis function; TSA: time series analysis; GPS: Global Positioning System.
Table 3 shows that the percentage reduction of latitude RMS error between the proposed method and UKF method, the largest percentage is 83.09%, the least percentage is 43.26%. The percentage reduction of longitude RMS error between the proposed method and UKF method, the largest percentage is 88.76%, the least percentage is 61.21%. The percentage reduction of east velocity RMS error between the proposed method and UKF method, the largest percentage is 94.78%, the least percentage is 76.35%. The percentage reduction of north velocity RMS error between the proposed method and UKF method, the largest percentage is 89.32%, the least percentage is 54.46%. The positioning performance of the proposed method is obvious better than the other two methods.
Percentage reduction of RMS errors between proposed method and UKF method in different GPS outages time.

RMS: root-mean-square; GPS: Global Positioning System; UKF: unscented Kalman filter.
Conclusion
This article propose a compounded prediction algorithm to assist UKF during short or long GPS outages. The algorithm use the RBFNN and TSA to predict the position error and velocity error between SINS and GPS, then use the predict error to correct the error of SINS, thereby improve accuracy of both positioning and velocity during GPS signal is blocked. The proposed mixed prediction method is compared with UKF method and RBF assist UKF method by simulation experiment, and its superior performance is proved by the result of the experiment. Both the maximum error and root-mean-square error of the proposed method are less than the corresponding error of other methods.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61573113, 61673128, 61573117) and Natural Science Foundation of Heilongjiang Province (F2015031).