
Abstract
Recent years, electronically controlled air suspension has been widely used in vehicles to improve the riding comfort and the road holding ability. This article presents a new nonlinear adaptive sliding-mode control method for electronically controlled air suspension. A nonlinear dynamical model of electronically controlled air suspension is established, where the nonlinear dynamical characteristic of the air spring is considered. Based on the proposed nonlinear dynamic model, an adaptive sliding-mode control method is presented to stabilize the displacement of electronically controlled air suspension in the presence of parameter uncertainties. Parameter adaptive laws are designed to estimate the unknown parameters in electronically controlled air suspension. Stability analysis of the proposed nonlinear adaptive sliding-mode control method is given using Lyapunov stability theory. At last, the reliability of the proposed control method is evaluated by the computer simulation. Simulation research shows that the proposed control method can obtain the satisfactory control performance for electronically controlled air suspension.
Keywords
Introduction
In vehicles, the main function of the suspension system is to improve the riding comfort and the road holding ability. Suspension system can suppress the acceleration amplitude of the sprung mass in a vehicle and reduce the tire deflection. Therefore, using the suspension system, the riding comfort and the road holding ability can be enhanced effectively.
From a control point of view, suspension includes passive suspension and active suspension. In the passive suspension, the elastic stiffness and the damping parameters of the suspension are not controlled. Elastic stiffness and damping parameters of the suspension do not vary with the road conditions. In the active suspension, the suspension force is controlled, and elastic stiffness or damping parameters of the suspension can be adjusted according to the road conditions. Compared with the passive suspension, the active suspension has the better performance for improving the riding comfort and the road holding ability.
Electronically controlled air suspension (ECAS) is an important type of active suspension system, where the nonlinear air spring is utilized to replace the traditional steel spring in the suspension system. 1 –3 Compared with other types of suspension system, ECAS can better enhance the riding comfort and the road holding ability.
In recent years, some new control methods of the various suspension systems including ECAS have been proposed to enhance the riding comfort and the road holding ability of the vehicle, such as optimal control, 4,5 robust control, 6 –11 fuzzy control, 12 –14 multi-agent control, 15,16 and so on. Although these existing works have obtained the acceptable control performance for the suspension system in vehicles, there are some important issues should be further discussed. For example, in the existing works, spring component in the suspension system is often assumed as a liner spring. In fact, air spring in ECAS is a typical nonlinear spring. Meanwhile, for the difficulty of the online measuring, some key parameters in ECAS are unknown, such as the stiffness coefficient of the spring, the equivalent stiffness coefficient of the tire, the equivalent damping coefficient of the damper, and so on. Parameter uncertainty in ECAS is an important problem, which is rarely considered in the existing work.
In this article, a nonlinear adaptive sliding-mode control method of ECAS is proposed. At first, a nonlinear state-space model of ECAS is formulated to describe the dynamic behavior of ECAS, where the nonlinear dynamical characteristic of the air spring is considered. Based on the nonlinear dynamical model, an adaptive sliding-mode control method is presented to control the displacement of ECAS in the presence of parameter uncertainty. Parameter adaptive laws are given to estimate the unknown parameters. The innovations and contributions of this article are summarized and listed as follows. The nonlinear dynamical model of ECAS is derived, where the nonlinear characteristics of the air spring are introduced. To solve the difficulty of the nonlinearity and unknown parameters, an adaptive sliding-mode control is presented for ECAS. Parameter adaptive laws are designed to estimate the unknown parameters in ECAS. Compared with the existing control methods for ECAS, sliding-mode control with parameter adaptive laws is firstly used to control ECAS.
The rest of this article is organized as follows. The nonlinear state-space model of a quarter-car ECAS is described in the second section. The adaptive sliding-mode control method of ECAS is designed in the third section. The fourth section is the presentation and analysis of the simulation results. At last, some conclusions are given in the fifth section.
Descriptions and modeling of ECAS
The following nomenclature is used throughout this article.
Nomenclature: ms: sprung mass mu: unsprung mass k: equivalent stiffness coefficient of the spring kt: equivalent stiffness coefficient of the tire b: equivalent damping coefficient of the damper Fa: air spring force Fb: damper force Ft: tire force F: suspension force zs: vertical displacement of the sprung mass zu: vertical displacement of the unsprung mass zr: vertical road profile
A simplified quarter-car model of ECAS is shown in Figure 1.

Simplified model of a quarter-car ECAS. ECAS: electronically controlled air suspension.
In this section, sprung mass ms is the mass of the vehicle body. Unsprung mass mu is the assembled mass of the axle and wheel.
The nonlinear force of the air spring Fa is modeled as

where ε is a constant.
The damper force Fb is modeled as

When the vehicle is traveling, the tire is assured contact with the road surface. The tire can be modeled as a linear spring with the equivalent stiffness coefficient kt. Therefore, the tire force is formulated as

Based on Newton’s second law, the dynamic equation of the active suspension system is derived as


In this article, the control signal is selected as

State variables are defined as

According to equations (6) and (7), the system dynamics of ECAS are rewritten as the following state-space form model
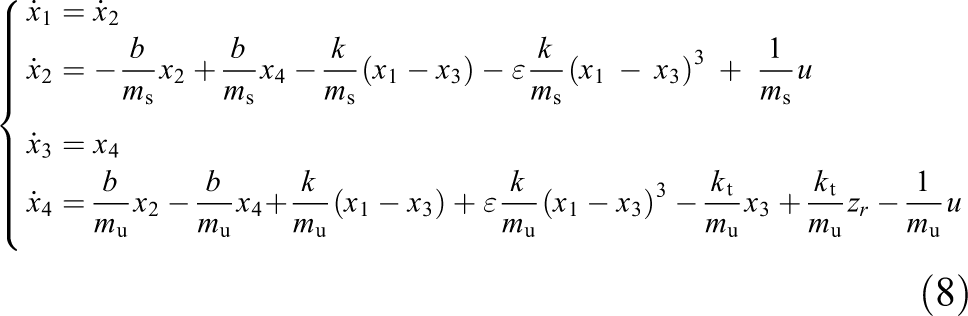

where y is the suspension displacement.
Letting
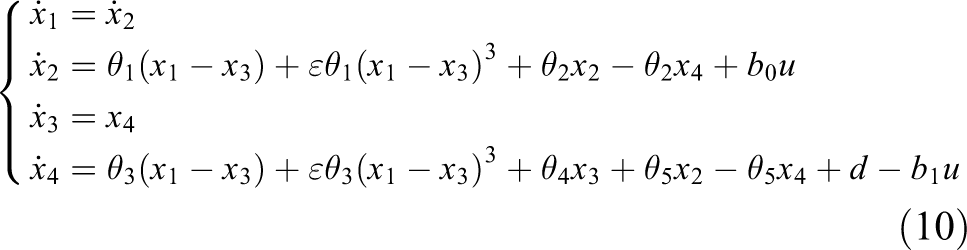
In equation (10), d is the unknown external disturbance, which satisfies the following constraint inequality

where D is a known constant, indicating the maximum value of d.
Nonlinear adaptive sliding-mode control method of ECAS
In this section, based on the state-space model (10), the nonlinear adaptive sliding-mode tracking control method is designed to control ECAS. Parameter adaptive laws are given to estimate the unknown parameters in ECAS. To get a better description of the proposed control method, at first, we design a sliding-mode control of ECAS without considering the unknown parameters in the “Sliding-mode control of ECAS” section. Based on the control method in “Sliding-mode control of ECAS” section, an adaptive sliding-mode control of ECAS is designed in “Adaptive sliding-mode control of ECAS” section, where parameter adaptive laws are given to estimate the unknown parameters in ECAS.
Sliding-mode control of ECAS
The tracking error of displacement of ECAS is defined as

where yd is the setting point of displacement.
In this section, s is the sliding-mode surface. s is described as

where c is a positive constant.
Sliding-mode control signal consists of two parts, including the equivalent control signal and the switching control signal.
17
The equivalent control signal is the control which keeps the trajectory of the dynamical system on the sliding-mode surface. It can be solved from
Sliding-mode control signal is described as

In equation (14), ueq and usw are the equivalent control signal and the switching control signal, respectively.
Neglecting the external disturbance d, the time derivative of s is

Letting

usw is designed as

where K is a positive constant. K satisfies the following condition

Therefore, sliding-mode control is
Remark
For stability, K must satisfy the inequality (18). Therefore, K is usually chosen to be conservatively large. If K is too large, the chatter of the closed-loop system will be too large.
Adaptive sliding-mode control of ECAS
In the actual control problem, many key parameters of the controlled object are unknown. 18 –21 In ECAS, some parameters including k, kt, and b are unknown parameters for the difficulty to be measured on line. Therefore, θi (i = 1, 2, 3, 4, 5) in equation (10) are unknown parameters. It is not suitable that these unknown parameters appeared in the controller. If the controller expression has the unknown parameters, the controller cannot be applied in practice. 19,20
For the unknown parameters, the control law (19) can’t be applied in engineering practice. In this section, in order to estimate the unknown parameters in ECAS, the parameter adaptive laws are designed.
At first, we define

where
In this section, Lyapunov function candidate V is given as

where γ1, γ2, γ3, γ4, and γ5 are positive constants, respectively.
According to equation (20), we have

The time derivative of V is

The time derivative of s is

Substituting equations (22) and (24) into equation (23), we have


In this section, parameter adaptive laws are designed as





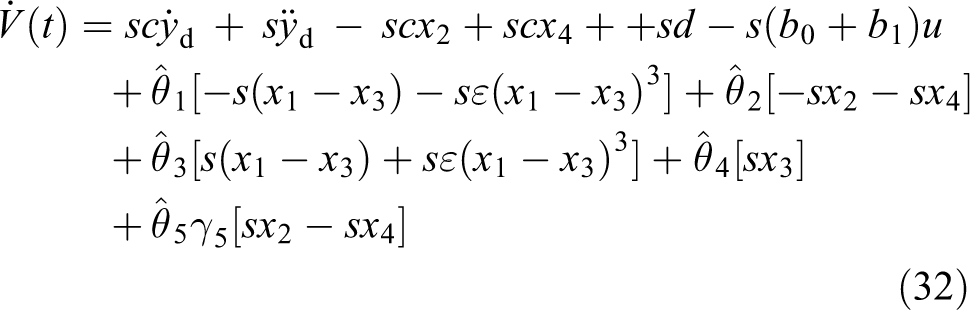
Substituting equations (27) to (31) into equation (26), the time derivative of V is
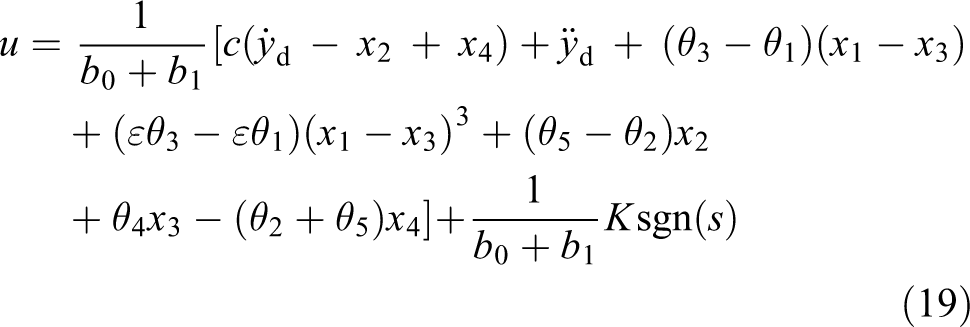
In this section, the control signal u is designed as

where K satisfies the inequality condition (18).
Substituting equation (33) into equation (32), we have

According to equations (18) and (34), we know

Therefore, according to the Lyapunov stability theory, for the nonlinear dynamical ECAS system described by equation (10), under the control law (33) with the parameter adaptation laws (27) to (31), with the specified inequality (18) for design parameters, the closed-loop control system of ECAS is stable.
Simulation result and analysis
In this section, a simulation analysis case is given to verify the effectiveness and applicability of the proposed nonlinear adaptive sliding-mode controller described above.
A sinusoidal roadway is introduced as the input disturbance signal in the suspension system, which is assumed as zr = 0.1 sin(t).
With the active suspension control, the vibration of the suspension displacement can be effective suppressed. In this section, the setting point of the displacement is yd = 0. The proposed adaptive sliding-mode control method is applied to control the suspension system, which is utilized as the active control. In Figure 2. the control performances of the active control and the passive control are shown for comparison.

Suspension displacement of the active control and passive control.
In Figure 2, the solid line is the suspension displacement using the proposed adaptive sliding-mode control method as the active control. The dashed line denotes the suspension displacement response with the passive control. It can be observed that the vibration of the suspension displacement is suppressed in a small range with the active control.
The control input signal, that is, the suspension force F is shown in Figure 3.

The control input signal, that is, the suspension force.
Conclusions
The nonlinear dynamical model of ECAS is proposed in this article. The nonlinear characteristic of the air spring is introduced in the proposed nonlinear dynamical model. Using the improved model, a nonlinear sliding-mode controller with the parameter adaptive law is designed as the active control for ECAS. Stability analysis of the closed-loop control system of ECAS is performed via Lyapunov stability theory. According to simulation case results, the proposed nonlinear adaptive sliding-mode control method can obtain the satisfactory operation performance for ECAS.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China (61773189), Natural Science Fundamental of Liaoning Province (20170540443), and the Program for Liaoning Innovative Research Team in University under grant (LT2016006).