
Abstract
This research introduces an innovative methodology for the integrated modeling, simulation, and analysis of two fingers, with particular emphasis on their fundamental roles in everyday tasks. In this study, we provide two nonlinear control strategies, specifically Sliding Mode Control (SMC) and Feedback Linearization Control (FLC), to achieve accurate and stable finger movements. As mentioned earlier, the controllers are utilized in the context of a biomechanical model consisting of two fingers, each possessing two degrees of freedom. These controllers enable the coordination of flexion and extension movements. The research conducted in our study emphasizes the coordinated regulation of finger movements, enabling the achievement of flexion through the utilization of two nonlinear controllers. By implementing these sophisticated control mechanisms, we can effectively showcase our model’s fidelity in adhering to the physiological limitations inherent to human fingers in their natural state. In addition, the proposed controllers demonstrate sound mitigation of non-linearities, such as load variations, different velocities, positional changes, and damping forces. This approach presents several advantages, such as handling non-linearities, guaranteeing robustness, choosing suitable parameters, and conducting comparative analysis. In order to substantiate our findings, we develop the nonlinear model utilizing the MATLAB/Simulink software. The findings of our study demonstrate effective regulation and control of the two-finger model’s position. In our study, we were able to get flexion angles of
Introduction
Biomechanics is a branch of kinesiology that deals with movement mechanics. Bio is the study of the living body, and mechanics is the study of movement and the movements that generate forces. Biomechanics is a field of health science that serves to prevent injuries and develop rehabilitation programs and modalities. 1 This study is based on the partial disability of the human hand. Partial disability is when some part of the human body is injured and is no longer able to perform its full work capacity.
In this study, a nonlinear controller controls the two-finger model of the hand prosthesis. Nonlinear controllers are suitable for real systems because they are usually nonlinear. It is a challenge to control these two fingers with a controller that behaves like an artificial brain. 2 The model of this work is based on two fingers that can be part of a humanoid robot for industrial purposes where it is dangerous to use natural parts of the human body for dangerous tasks or to use them as a prosthesis for partial disability of a human hand.
The prosthesis first came into the world when the Roman Marcus Sergius, who lost his hand during a war, replaced his disabled right hand with a prosthesis so that he was able to hold his shield while winning the war. 3 The myoelectric prosthesis has various batteries and motors that are connected via an input through which they are controlled when muscles generate the signal. Accordingly, two electrodes, an anode and a cathode, have been placed on the surface of the skin to recognize the needs of the muscles. This triggers the movement of what is intended to be needed. 4 In 1948, transistors were developed, which were then also started to be used in prosthesis. 5 The Viennatone hand is a state-of-the-art, advanced prosthesis developed using a novel myoelectric system. 6
As history shows, much research has already been done on prostheses. At the same time, research efforts in this area have yet to progress very far. Much attention has been paid to these areas over the last 25 years. They fill all the research gaps for the next significant push in prostheses. The challenging work of recent years has led to the most advanced technologies in the field of prosthetics while overcoming many setbacks. This shows that it is an area that requires more attention. It is the most famous complex problem in medical science and technology. 7
In this study, we present a pioneering approach for the coordinated modeling, simulation, and analysis of two-fingered hand functions that are important for activities of daily living. The unique contribution of this research lies in the proposal and implementation of a nonlinear controller that enables stable and precise finger movements. In particular, we focus on the coordinated control of flexion and extension and use the nonlinear controller to control these movements and enable translational and rotational movements.
A disabled person cannot carry out everyday activities. They are therefore dependent, unable to express thoughts or perform ADLs (activities of daily living). We can change this with the help of biomechanics. The biomechanics field helps us become independent people. With the help of biomechanics, we have developed a two-finger prosthesis model for disabled people.
There are linear controllers, but we have to deal with non-linearity in the real world. So when we use a nonlinear controller, we will face some nonlinear uncertainty problems, such as position, load, velocity, noise damping forces, etc. With the help of the best nonlinear controller, we can mitigate these nonlinearities.
This research has four major strengths. The first is the holistic approach: our research addresses the critical problem of providing support and independence to disabled people in carrying out everyday activities. By developing a two-finger prosthesis model, we offer a comprehensive solution. The second strength is the non-linear controller: using a non-linear controller is a strength as it allows us to take into account the complexity and non-linearity that often occurs in real-life scenarios. This can lead to more effective control in practical applications.
Thirdly, robust pursuit: Emphasizing robust tracking as one of the features of our approach demonstrates the ability to maintain precise control in the presence of uncertainty, which is a crucial requirement for utilities. Fourth is real-world validation: using MATLAB/Simulink to investigate our nonlinear model indicates a systematic and practical approach to validating our research.
Various causes of disability depend on a person’s ability to perform the activity. These can be accidents while driving, working in hazardous conditions, a congenital disability, and other injuries. The term prosthesis is primarily used to invent modalities, devices, and modifications that help patients overcome their disability. The prosthesis is used to overcome disabilities. A disability of the human hand can be present from birth or due to an accident. It can last a lifetime and affect a person’s quality of life.
A partial disability is defined as a type of disability in which a person is not disabled but is unable to perform activities of daily living (ADLs) efficiently. A partially disabled person cannot perform all tasks but can perform some. A partial disability is when a person is 25%–50% physically disabled. Partial disability of the upper limbs can occur when the following conditions are present: carpal tunnel syndrome, nerve damage, loss of part of a finger/thumb or a complete finger of the human hand. 8
Our study is pioneering in prosthetic technology: the development of two-finger prostheses using non-linear sliding mode control. This innovation closes a historical research gap and has the potential to revolutionize the field.
Our research is characterized by a nonlinear controller that overcomes the limitations of linear controllers. This controller can handle the complexity of real-world assistive devices and significantly improve the possibilities of prosthetic technology.
Our research is characterized by robust tracking and dealing with uncertainty, which distinguishes it from others. Unlike many other methods that struggle in uncertain environments, our approach prioritizes stability and consistency, ensuring reliable performance even under challenging conditions. This resilience increases the effectiveness of our prosthetic technology in real-world scenarios.
Our practical approach, which uses MATLAB/Simulink, sets us apart. It enhances accessibility and feasibility, makes our technology applicable, and bridges theory with real-world implementation.
Lastly, our research adopts a holistic approach that extends beyond the physical limitations of disabilities. We aspire to improve the overall quality of life and independence of people with disabilities, which makes our methodology a comprehensive solution. By integrating advanced control techniques with a deep understanding of users’ needs and aspirations, our research strives to empower people with disabilities by providing them with prosthetic technology that works exceptionally well and meets their overall goals of living a fulfilling life with more independence and dignity.
The Optimal Hybrid Control Design with feedback linearization and
The experiment on tapping moves between interpersonal and intrapersonal touch. Interpersonal is between two or more people, while intrapersonal is between us and ourselves. The experiment uses the Haken Kelso Bunz movement model, which was developed specifically for bimanual movements. For example, two hands move to perform different tasks simultaneously as needed. This model works with phase stability and a system of coupled limit cycles that carry oscillations. This model works with the definition of single limb movements. In this paper, according to the experiment, the result shows intrapersonal is more stabilized anti-phase tapping for two fingers than interpersonal, which can cause complexity in the phase tapping movement for four fingers. 10
In another work, the author uses a cascade controller in which a central controller automatically adjusts the desired value of the other secondary controller. The central controller is implemented as an adaptive back-stepping position controller, and the secondary controller here is a PID controller. This work is based on anthropomorphic inspiration (mimicking human characteristics), which accurately determined the motion trajectory of the PAM Pneumatic Artificial Muscle Actuator. The main contribution of this work is the compact size of the robotic hand with a maximum power-to-weight ratio. The system is highly resistant to uncertainties. 11
The best solution for stroke patients is physical therapy using modalities that act on the upper part of the skeleton or the exoskeleton. Portable index finger rehabilitation is suggested in this article. Flexion/extension f/e and abduction/adduction a/a are the movements when a human hand grasps a spherical object or a glass. This modality is strongly oriented toward f/e and a/a exercises. Using this device, the author removed the shear force on a total of three phalanges (distal, middle and proximal). The result of the experiments where exercises were performed using the modality shows that it works accurately and that the dimensional parameters of the exoskeleton all show active mobility. 12
In the work,
13
the author conveys an understanding of coordinated finger movements. The bond diagram shows the state space representation of the dynamic physical system of two fingers. The authors have developed a
In this study, a back-stepping sliding mode control (BSMC) method for uncertain underdriven nonlinear systems is presented. The control of uncertain electromechanical nonlinear systems (UEMNS), which operate with fewer inputs than degrees of freedom, is still a challenge. In this paper, a class of UEMNS that can be converted into the so-called regular form is considered. The Lyapunov technique is used to demonstrate stepwise stability rigorously.
Compared to the standard SMC, this proposed control law offers benefits such as low-frequency vibrations and reliable performance under fitting uncertainties. The numerical simulation results of the cart-pendulum system are used to verify this claim. The benefits and effectiveness of the aforementioned control approach for this class are further demonstrated by comparing these results with those from the mainstream literature. 14
The RBF neural networks estimate nonlinear drift functions adaptively. The theoretical designs, analysis, and simulations of the cart pendulum and quadcopter demonstrate the feasibility and advantages of transforming the regular shape and control design developed. The attractiveness of the proposed technique for this class is demonstrated by comparing the proposed synthesis with the existing literature. 15
The authors Milner and Franklin 16 used the two-dimensional matrix stiffness method. Through the 2-D analysis, they determined the direction of the force exerted on a finger and other stiffness tasks, for example, the flexion and extension of the finger. The result of all modeling provides a better understanding of mechanical impedance for manipulators.
The under-actuated trussed robotic finger (UTRF) method for understanding the modeling of under-actuated fingers. The author uses the pole placement method to stabilize the nonlinear system. The simulation results show that the control method effectively controls the parameters of robotic fingers. 17
In another paper, the author based the control on the tendon, a collagen tissue that leads from the bone to the muscle. The author presented a tendon-controlled, wearable robot. He developed a model that can control the flexion of the MCP joint. This control force was enhanced by the wire to the fingertip, which helps to reduce nonlinearities. Four significant nonlinearities were mentioned in a paper and resolved by modeling. 18
They proposed a model that can be used to control the stiffness of robotic fingers in the presence of sudden nonlinearities. The controller designed in this work is based on a linear subsystem, and the various nonlinearities are load, velocity, friction, damping forces, etc. The modeling of the controller was done to resist the above nonlinearities. The technique was performed on the actual finger at a frequency of 40 Hz. The results show improvements in the investigated model under examination. 19
By using the method of twisted strings to help actuate robotic finger strings, the shaft is made to rotate, and the shaft further helps the motor. Torque is generated via the angle of rotation of the shaft, and the strings are attached to a driven object that helps the finger to perform actions. It is a unique mechanism for controlling the position and force of robotic fingers. 20
The robot has various drive types, such as pneumatic, hydraulic and electromagnetic drive types. Handling objects with the help of grippers is quite a challenge. The article contains actual work performed by the best robot hand. The performance tests of the robot and the analysis of the gripper were carried out using finite element software. The robot starts to work when pneumatic pressure is applied to grip light objects. The maximum deformation is 26.9 mm (approximately 1.06 inches) at the tip of the actuator, while the stress is 5–13 MPa at the top of the pneumatic chamber. The reading of the regression analysis is performed. 21
A single finger of the linear drive system can move slightly to allow a parallel gripper to perform the gripping task. The article describes an adaptive mechanism for flexion and extension. The gripper can adapt itself to the shapes of different objects and their environmental conditions. The gripper follows symmetrical and asymmetrical configurations. The two-finger prototype has been implemented and tested in many scenarios to verify human-like robots. 22
Their research aims to develop a non-singular terminal sliding mode control method based on a perturbation test to ensure the stability of microelectromechanical systems under concentrated perturbations. When using a non-uniform terminal sliding mode control scheme, the system state approaches the button and the origin at a particular time. Moreover, when using the perturbation monitor, the convergence of the disturbance error is guaranteed in a finite time. The best sliding surface coefficient is calculated during the design as a linear matrix inequality. It is shown that the simulation results of a nonlinear biomechanical model prove the reliability of the proposed approach compared to other methods. 23
Their paper presents a novel fractional sliding mode controller based on the nonlinear proportional-integral-differential controller for the synchronization of fractional chaotic systems with uncertainty and disturbances. With the proposed control approach, they introduce a new partial-order control law that ensures robust and stable synchronization of chaotic systems in the case of bounded driver uncertainties and disturbances as well as guided systems according to Lyapunov’s theorem. The proposed sliding mode controller synchronizes two non-uniform chaotic systems under noise and uncertainties. The simulation results confirm the effectiveness and reliability of the present control law. 24
This research presents a sliding mode control approach applied to a two-finger model. This control strategy uses a variable structure, where the variable structure changes in response to the current state value. The system operates within a switching region, called the sliding surface, which ensures stability of the system. We use feedback mechanisms to stabilize the system in the closed loop.
A notable advantage of sliding mode control is its robustness against uncertainties, as the system remains in a sliding mode. In addition, higher-order harmonics are effectively reduced, which improves the control performance of the two-finger model operating as a manipulator.
The sliding mode control is developed based on a linear parameterization that takes into account the dynamic properties of the manipulator. This involves the creation of a regressor matrix, which is a product of a known nonlinear function and an unknown constant vector. This matrix serves as the basis for our control law.
We introduce an adaptation algorithm in which the bounds are established as functions of the current state of the system and the tracking error. Our control law relies on these bound estimations, enhancing control performance.
Another aspect of this work is the introduction of an alternative nonlinear controller, namely the feedback linearization controller. This controller uses feedback from primary states to achieve the desired stability and offers the advantage that the controller gains can be easily determined.
The working process of this controller involves the separation of linear and non-linear multivariable components for the two-finger manipulator. By comparing ideal signals with actual signals, we derive the acceleration profiles for the limbs of the two fingers. This technique effectively converts the nonlinear process into a linear process within a certain range. Finally, we implement the robust feedback linearization control, thus consolidating its role in modeling and controlling the system.
The rest of the construction of this paper is as follows. In the next section, we have discussed some predictive models for sliding mode controller and feedback linearization to better understand the literature review. In Section 3, we have discussed the system modeling for both controllers; it also contains the preliminaries of controllers, controller designing, switching action, state space of the proposed model and parametric values for both controllers.
In section 4, we have performed simulation results for both controllers. In Section 5, we made a comparison between the sliding mode control with feedback linearization control to see which controller is better for the two-finger model. This was done using the performance results, the maximum flexion angles of both joints, the time to reach the desired response, the maximum values of the applied gain, and the lambda of both joints. In the same section, we also performed an experimental validation comparing our results with those of the previous study, which showed that our solution is better than it.
The last section is the concluding section that encapsulates our paper, offering insights into future directions for research endeavors to further enrich this area of study.
Human hand anatomy
The human hand consists of 27 bones. Fourteen of them are phalanges. Figure 1 shows the anatomy of a human hand. Each finger has three phalanges. The upper tip of the finger has a distal phalanx. The middle is an intermediate phalange, and the end of the finger holds the proximal phalange, which is connected to the metacarpal. Each hand has five metacarpals, which in turn are connected to eight carpals. In this model, we work on two fingers: the ring finger and the little finger, which is located on the ulnar side. The other fingers are on the side of the median and radial nerves of the hand.
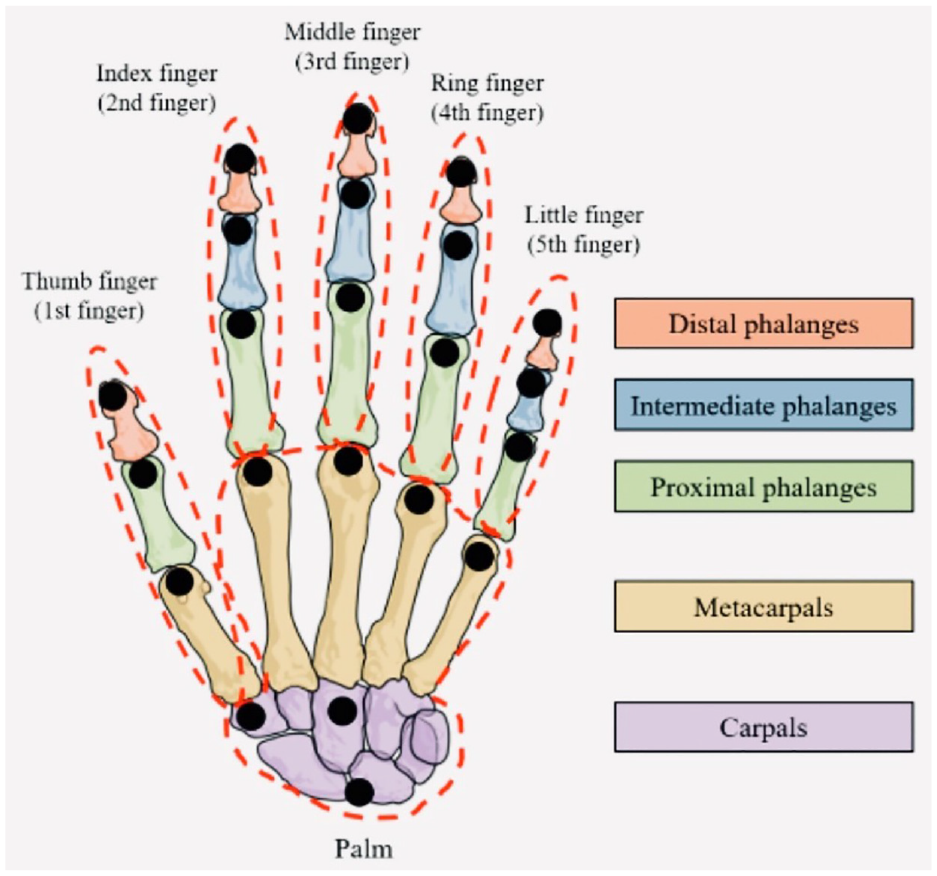
Human hand anatomy.
Predictive model for sliding mode controller
Semi-active control applications for structures are of great interest in civil engineering. In this paper, a discrete-time shear-mode controller with a hybrid control strategy based on Gao’s approach and a variable access rate is designed and implemented for practical applications in structures with magnetic resilient (MR) dampers. The structure is designed as a collective stacking system with five degrees of freedom controlled by an MR damper between the ground and the first floor. The MR inhibitors were investigated, and their behavior was characterized using a modified Bock-Wenn model and an artificial neural network (ANN) as forward and backward models, respectively. The five-story building was simulated under the seismic excitation of the El Centro earthquake in combination with historical data from the Northridge and Kobe earthquakes. It has been shown that the hybrid control strategy provides better results in terms of controller power consumption and time-averaged structural response by reducing noise compared to the Gao controller. 25
Inverted pendulum systems are exceedingly popular in control system applications and are characterized by unstable, fast dynamics and non-linearity. A nonlinear controller must control a system with these characteristics. In addition, there are the problems of turbulence and parameter uncertainty, which must be taken into account in inverted pendulum systems. In this study, a non-linear controller, namely the back-stepping mode controller, is used. This controller is suitable for the control of inverted pendulum systems due to its robustness against uncertainties and disturbances. Based on experiments with smooth steps and sinusoidal signals, the controller can develop system stability well and react quickly. In experiments with mass perturbations and uncertainties, the back-stepping mode controller can adapt to these changes and return the system to the reference value. Compared to the sliding controller, the back-stepping controller reacts better and more robustly to noise and parameter uncertainty. 26
In this paper, a novel method to control the input/output linearity using a nonlinear disturbance controller (NDOB) for a four-tank liquid level system (QTLL) is proposed. First, a model of the QTLL system is formulated using Bernoulli’s law and the mass conservation method. Second, the linear I/O controller is designed to account for the nonlinearity and coupling characteristics of the QTLL system. Moreover, NDP is proposed for damage estimation and used for compensation control. Finally, simulation and results show that the applied strategy is better than PID control. 27
Predictive model for feedback linearization controller
A nonlinear controller with partial feedback linearization controls a mechanical system with a planar underdrive. This system was developed to simulate the behavior of a space rope connected at both ends to masses (standing for satellites) under certain conditions. Its two rigid bodies (thin rods) connect a flexible cable with springs and dampers to estimate the stiffness of the cable and the structural damping. The control system aims to move both satellites to the desired positions and ensure that the cables are fully extended in their final configuration. The closed-loop stability is verified, and it is proven that the system exhibits global asymptotic stability. Numerical simulations of its two cases analyzed the presentation of the projected nonlinear control technique, considering three different damping coefficient in one case and three different stiffness coefficient values. The simulation and calculations results show that the combination of partial feedback linearization and proportional derivative control can bring the satellite into the desired position and hold the cable in place. 28
The constant power load (CPL) differs from other resistive loads in that it can destabilize a negative impedance and keep it stable. It is a non-linear system with the smallest phase because it has poles on the other right half-plane, that is, it is a linear system. The journal stood for feedback linearization control for nonlinear uncertainties to stabilize them with satisfied power loads. The article mentioned the pole-zero method. Ultimately, the simulation and results show that the present control approach is robust to PI control and has a superior dynamic response, which is the best. 29
This paper presents a grid-following inverter that uses a conventional phase-locked loop as a synchronized unit controlled by a nonlinear feedback linearization controller. The feedback-controlled expands the control loop to a limited plane or a small region where equilibrium points or singular points are known. It enhances the grid following an inverter synchronized with a phase loop; therefore, voltage and impedance are known. From the infinite domain to obtain an equilibrium point, it is the robustness of nonlinear feedback control. The performance of the proposed control design was confirmed using MATLAB/Simulink and experiments. It was found that the proposed control unit expands the range of traction force and improves the dynamic response of the system. 30
This article presents the disturbance controller-based (DOBC) control of three-phase transformers in stand-alone mode. The controller is designed to control the output voltage during transients caused by internal uncertainties and external influences. The controller circuit combines linear feedback control with a noise sensor to achieve the dual objectives of integrated interference suppression and work control. The above performance of the controller is tested by simulating scenarios such as sudden load changes and parametric uncertainties. The test results show particularly good attenuation to achieve the desired transient response under the tested scenario. Moreover, its performance is evaluated when presenting nonlinear loads. The controller provides a sinusoidal output voltage with reduced total harmonic distortion (THD) according to the IEC62040 standard. 31
A nonlinear dynamic multiple-input-multiple-output model is used in the prosthesis, from which it was possible to extract useful information present in the trial phase that is essential for successful performance in the prosthesis, for example the recognition of patterns through which flexion and extension occur. The result shows that the MIMO model is effective when used in prostheses. 32
The control law is applied to mitigate non-linearities in robotics. Nonlinearities occur in a system of the mechanical structure of robots. The drive system is considered linear in this paper. This paper examines the nonlinear control of electro-pneumatic servo drives and is founded on the nonlinear control theory. This is considered as the main exception of non-linearity. The proposed control law involves proper input-output linearization by constant nonlinear feedback. This control law leads to a one-dimensional subspace that cannot be seen in a closed loop. The physical aspects of this nonlinear arrangement are given. This definition allows us to understand the behavior of electro-pneumatic servo drives. To compare the results of the same series of experiments, the convergence of the linear control laws in discrete and continuous time is presented. 33
With the rapid development of digital controllers, it is time to take the simple and useful Proportional integral derivative PID function into a new year of performance and reliability. Therefore, we present a nonlinear PID control system. It completes the current course by (1) analyzing the operation and use of control systems that are not used to improve performance even in linear installations; (2) using a control approach that is completely independent of the company’s mathematical model, which ensures internal reliability and reduces the complexity. Solid research and computer/hardware test results are provided. The proposed structure is capable of finding advanced solutions to applied problems while keeping the ease and ease of use of current technology. 34
A method for integrating unsteady flight control systems was developed, and the performance of the integrated control system was compared with the linear control system using quadratic linear optimization theory. The comparison is based on the dynamic response of the aircraft under high attack conditions. A nonlinear control unit has been found to minimize the loss during a stall and increase the attack speed, after which the aircraft can recover from a stall. 35
System model
Sliding mode controller
It is a design of a variable structure (a variable structure is a system that changes by the current value of its state). A system whose movement is limited to a switching line is called sliding. Sliding or switching achieves the desired stability to the origin when it is confined to the surface. The feedback gain is selected so that the system is stable in the closed loop.36,37 The benefits of the sliding mode controller are given as follows:
Uncertainties do not affect when the system is in sliding mode.
High-order harmonics reduction reduces the set of differential equations.
Simulink block diagram of two finger biomechanical model
Preliminaries of the sliding mode controller
Figure 2 illustrates the simulation block diagram of a two-finger model. It is defined as open kinematic rigid links named manipulators. It has degrees of freedom which accept torques as input using Lagrange Euler formulation.38,39
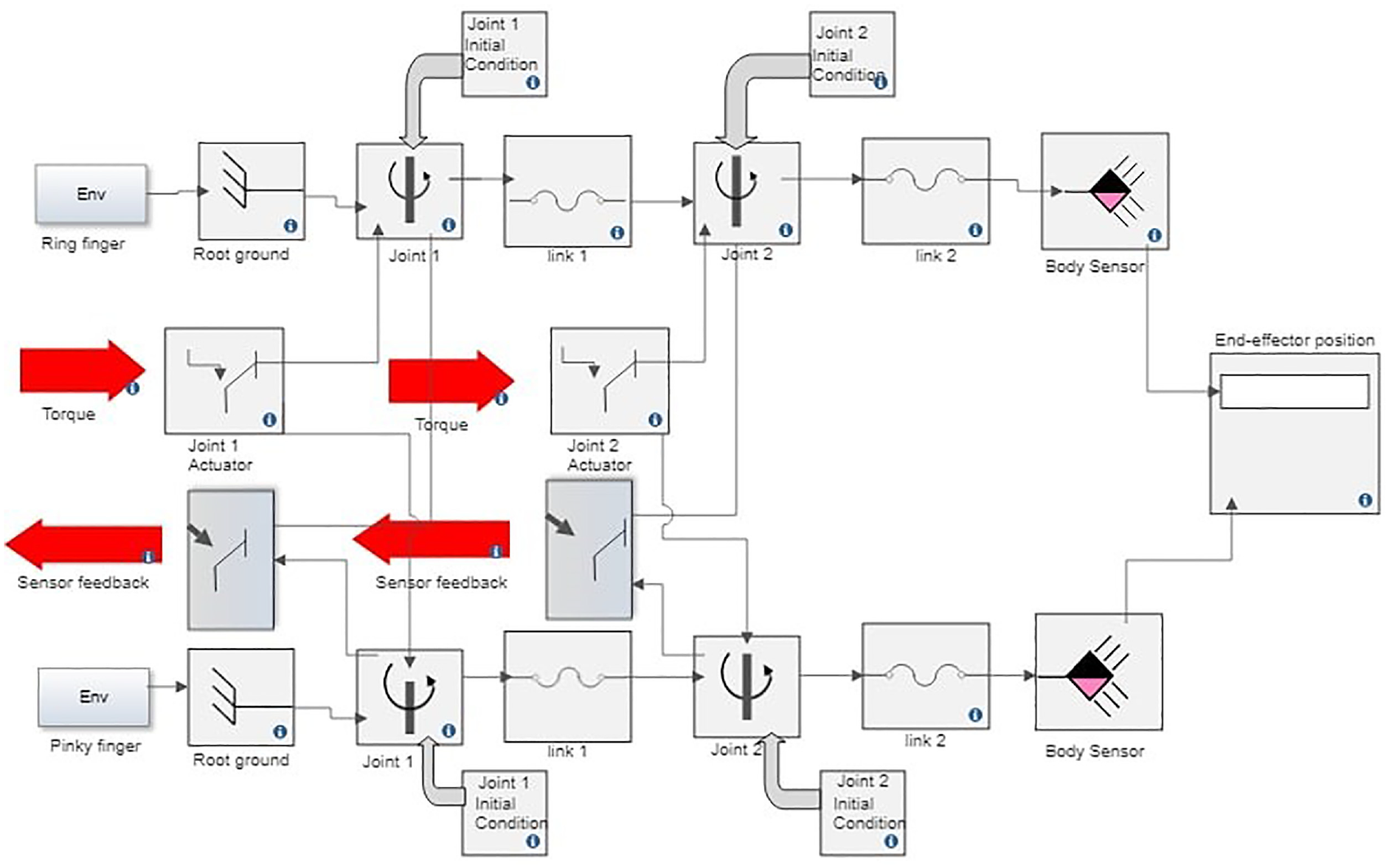
Block diagram of two finger model for movement coordination.
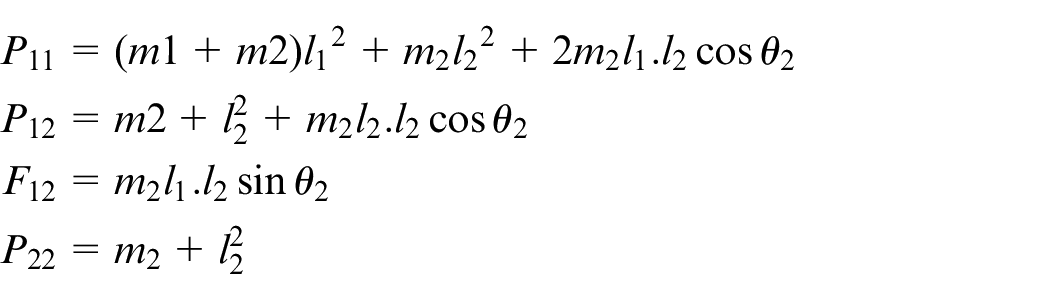
The Lagrange Euler dynamic model is given as equation (1):

Figure 3 illustrates the model of a finger implemented through MATLAB/Simulink our modeling approach is based on the modeling equations from Moradi and Malekizade,
40

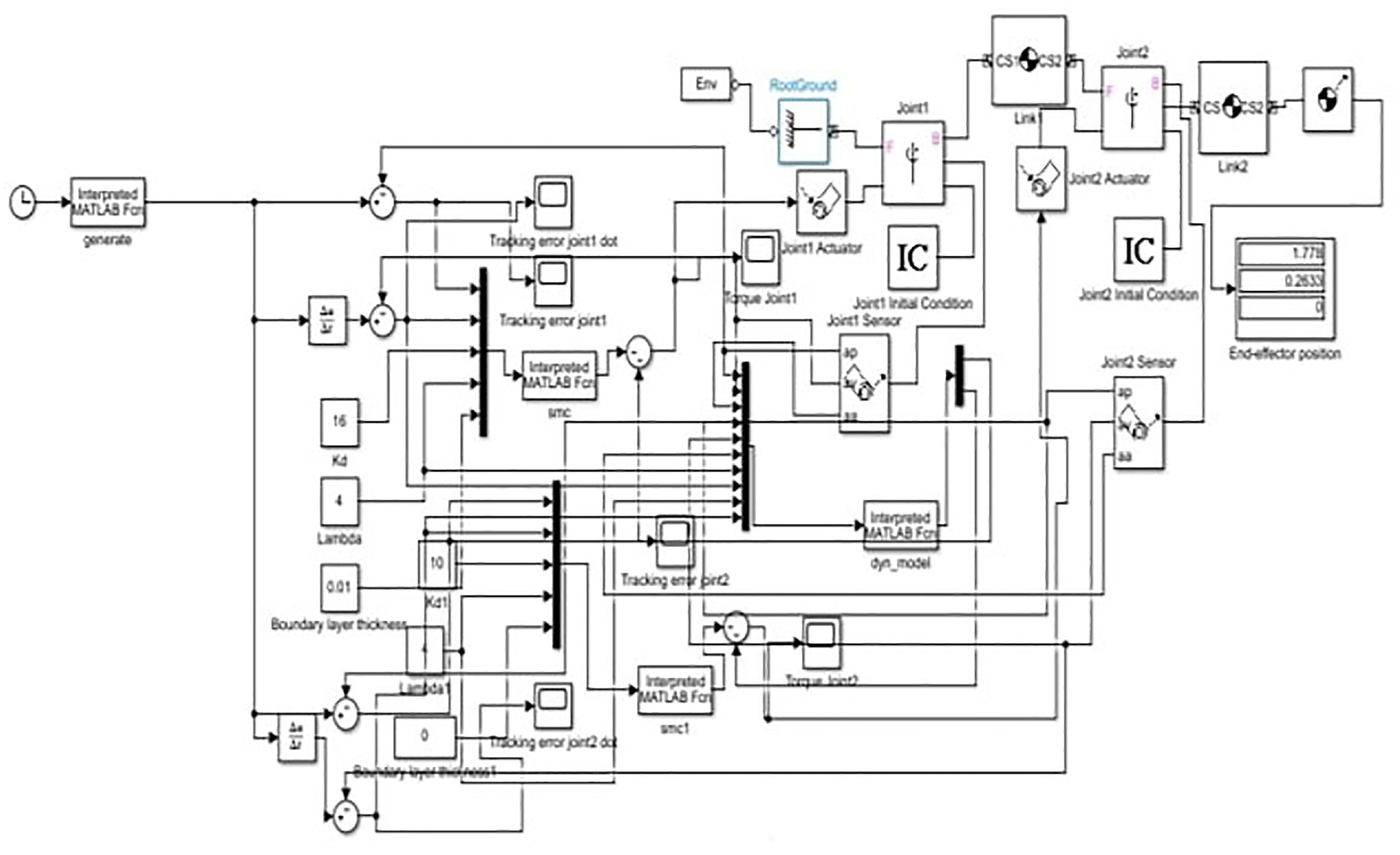
Model of finger implemented through MATLAB Simulink.
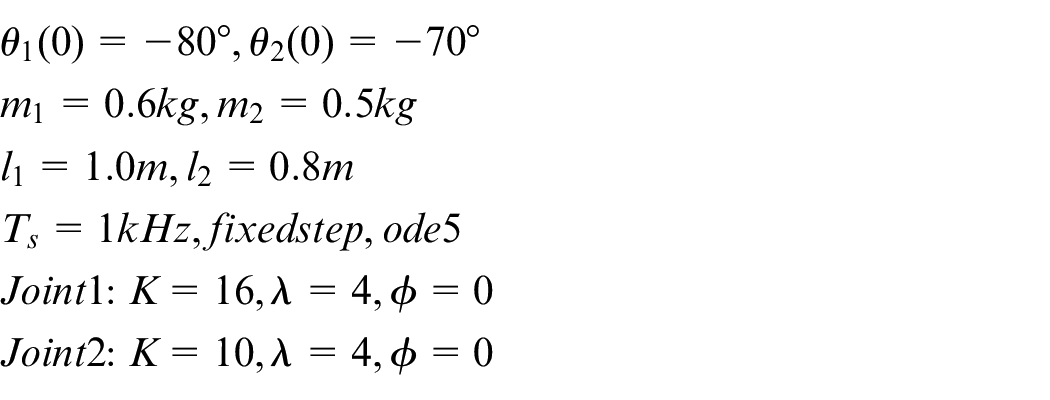
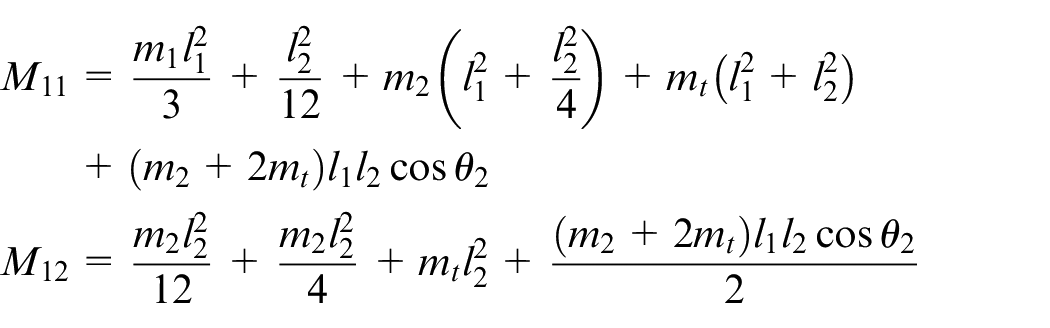
Here,
The above parameters can be linearized using a linear parameterization approach with selected manipulations. Figure 4 shows the representation of a two-link manipulator. The above manipulator is designed so that a sliding mode controller can control trajectory tracking problems in a two-finger model.
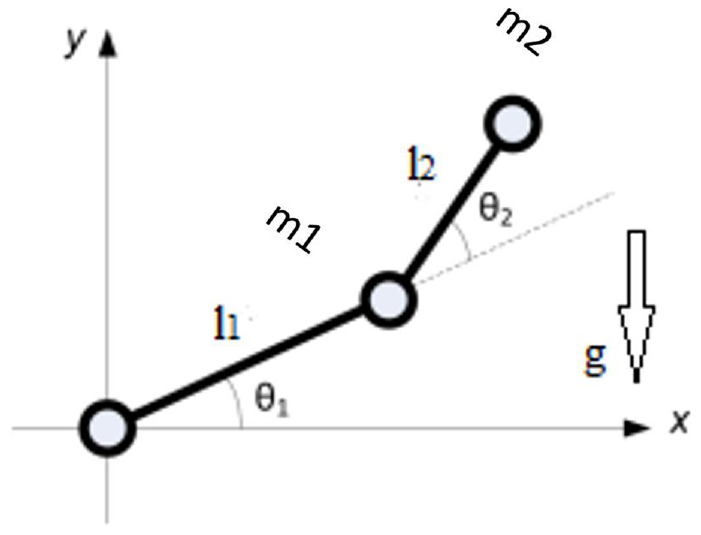
Manipulator.
Both M(x) and

Where
Sliding Mode Controller with boundary estimation is the following: The

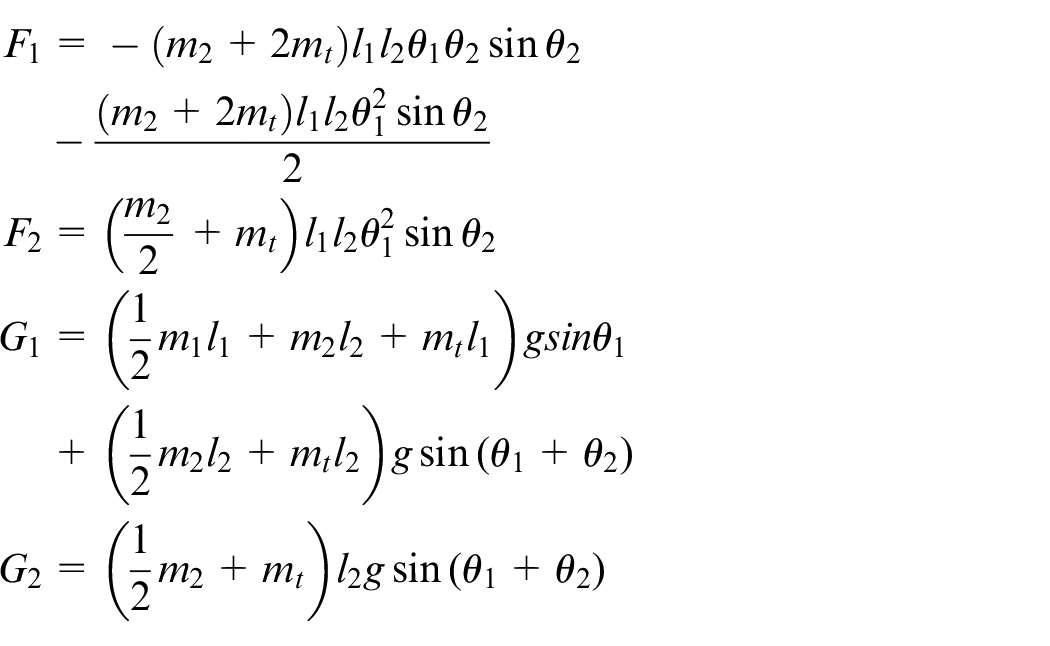
Above mentioned pa-rameters are so-called fictitious forces defined by
Controller design
To develop a robust trajectory tracking system, we first consider a system with nonlinear dynamics described by the function “f” and a control input denoted by “i”. This system can be expressed mathematically as follows:

For our analysis, we assume a second-order system, which leads us to the following equation:

To gauge the system’s performance, we introduce the concept of tracking error, defined as:

This tracking error shows a transient response that asymptotically converges to zero as time progresses. We define a crucial element of our control strategy, the sliding surface denoted as “p”, which controls the position and velocity control:


Next, we established a relationship between the derivative of “p”, the system dynamics, and the control input “i”. Starting with the equation:

In this equation, “f” stands for the non-linear dynamic model of our system and “i” for the control law with which the desired sliding mode is to be achieved.
Moving forward, we apply these principles to our two-finger model, incorporating the sliding surface defined in equation (4) and the control law presented in equation (8). This results in the tracking error
We employ the Lyapunov stability function to ensure stability in our nonlinear system. This function follows key conditions:
The Lyapunov stability function is defined as:

where
Taking derivative of
By applying parameter as per equation (3), we simplify
Finally, we conclude that:
These equations encapsulate the essence of our control law design, ensuring stability and precise control of our system.
Switching action
Introducing switching action for keeping a system that works in sliding surface:

Here

Overall control law can be expressed as:


For low frequency control:
Chattering is a common issue in sliding mode control (SMC), characterized by high-frequency oscillations or rapid control signal switching. We overcome this issue by using the boundary layer approach. The boundary layer is now the region where the control law switches between different control modes. Increasing this layer’s width reduces the switching frequency, which now helps reduce chattering.
The discontinuity can cause a chattering of trajectories near the surface p = 0. To solve this problem, smoothing out the discontinuous control law 15 and (16) in the neighboring region of the sliding surface is required. To do this this replaces signum (14) non-linearities by saturation non-linearities given by (17).
The signum function is a used component in SMC to provide robust control by ensuring that the system state remains at or near the sliding surface. Saturation, on the other hand, limits the magnitude of the control signal within a certain range.
The primary difference is that saturation imposes a smooth and bounded control signal, whereas the signum function results in a discontinuous, high-frequency control signal. Saturation effectively smoothens the control signal, preventing rapid and abrupt changes that are characteristic of the signum function. Replacing the signum function with saturation inherently reduces chattering.

Lagrange-Euler dynamic model is represented by equation (1), replacing

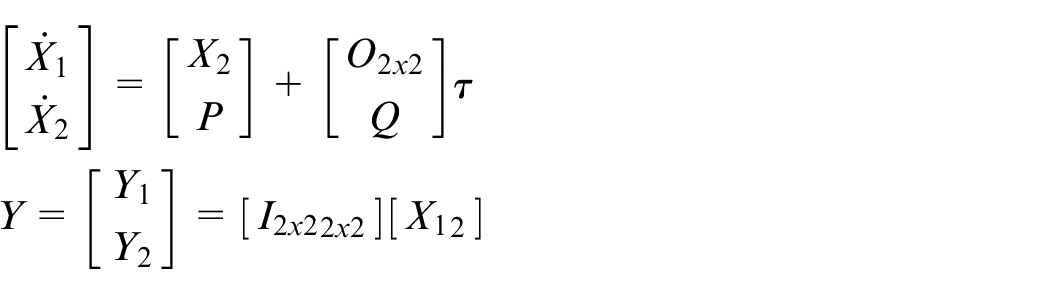
State-space representation of the proposed model
The state space representation of the proposed model is given as follows:

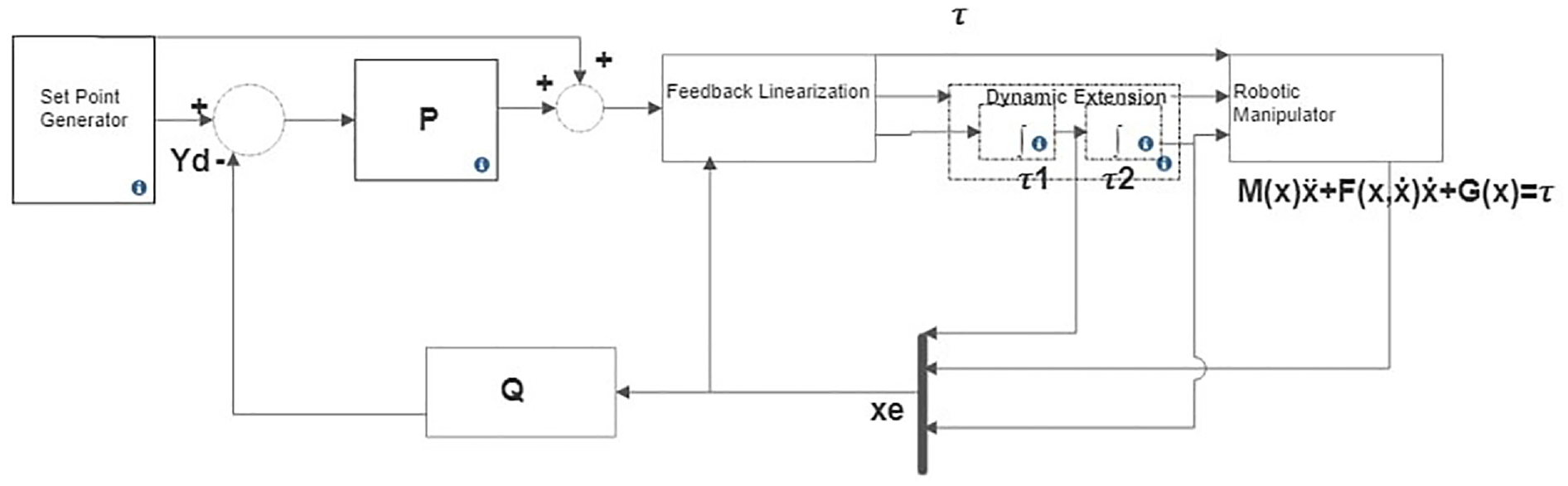
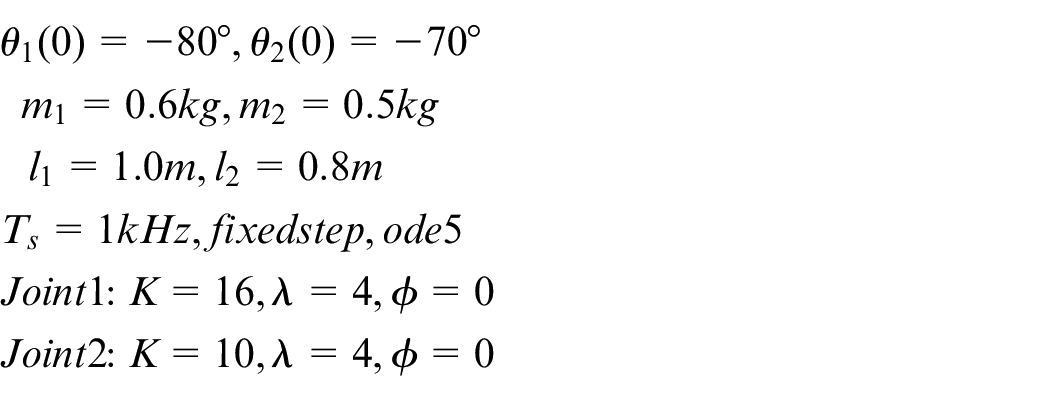
Parametric values
Input trajectory for each joint:

Also, it is a nonlinear structure of the proposed model, which is at the input state of the system.
Initial condition
Here,

Inside the boundary, the layer system is globally bound.


Feedback linearization
Working principle
The concept of feedback linearization is to find a system that allows the design of a controller for a nonlinear model without the conventional way of linearizing the model in a chosen region of operation. 41 This is a common approach for nonlinear systems. The approach involves coming up with a transformation of the nonlinear system into an equivalent linear system through a change of variables. The goal is to develop a control input with a linear input and output map strategy for the resulting linear control system. 42 This technique converts nonlinear processes to be linear in some range. All processes are nonlinear, so the use of these nonlinear controllers provides robustness and process regulation in nonlinear processes. The controller uses the feedback of the main states to achieve the desired stability. It can also be used to easily determine the controller gains.
Block diagram of feedback linearization
Preliminaries of feedback linearization
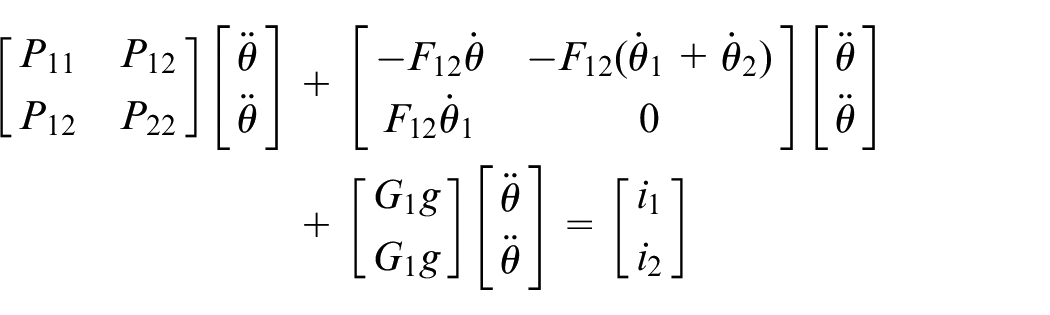
Figure 5 illustrates the block diagram of the feedback linearization control scheme. Consider the finger model by using the Lagrange-Euler dynamic model equation:

Block diagram of feedback linearization.
Here, base equations for feedback linearization control are taken from de Jesús Rubio
42
Where
Where,

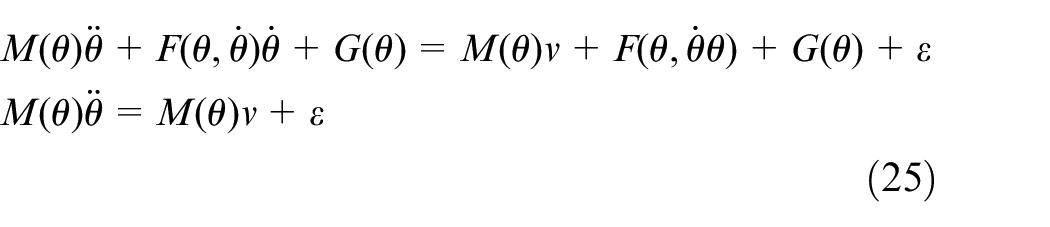
Equation of the system is derived. As we have multiple inputs and outputs, feedback linearization removes nonlinear properties and supplies an established linear system. To achieve it, we have:

As,

Now we assume new control vector

Here, we take the torque desired as
Taking common
we get:

Now, putting the value of torque from equation (19)

Because there is presence of error we can say:
By using the technique of feedback linearization, we get the following linear system:

Here,
Parametric values
Initial condition
Simulation results
In the pursuit of understanding and optimizing the behavior of our proposed controllers, we conducted a series of comprehensive simulations. These simulations aimed to predict and evaluate the stability and performance of two different control strategies: the Sliding Mode Controller (SMC) and the Feedback Linearization Control (FLC). The decision to use these controllers was driven by their potential applications in biomechanics and prosthetics.
A crucial aspect of our study was to ensure that the results obtained from these simulations were theoretically sound and physiologically relevant. To establish this relevance, we considered the temporal characteristics of the biomechanical finger model. In the human hand, the speed at which the fingers can open and close is critical to their functionality in daily activities. Research has shown that the typical opening and closing time of human fingers is within 1–2 s. Therefore, we have tried to validate our controllers within this physiologically reasonable time frame.
All simulations were run rigorously with a simulation time of 5 s, allowing us to capture a comprehensive view of the controllers’ performance. We recorded various parameters and metrics during these simulations to evaluate the controllers. Tracking error, measured in radians, provided insights into how closely the controlled system followed the desired trajectory. Torque, measured in Newton meters (N-m), was monitored to evaluate the control effort exerted on the biomechanical finger model. Time, measured in microseconds
The simulations were divided into three distinct scenarios, each shedding light on different aspects of controller performance. In simulation 1, we implemented the control law on the dynamic model without using a boundary layer. In this scenario, we were able to observe the initial response of the controller and its ability to adapt to the desired trajectory. We noted that although there was an initial tracking error, the controller quickly brought the system on track after approximately
In Simulation-2, a boundary layer with a parameter
In Simulation-3, we performed a robustness test by adding mass of 0.6 kg to one of the finger segments
Additionally, we explored and compared the performance of the sliding mode controller and the feedback linearization control in a dedicated section. This comparison revealed that the sliding mode controller outperformed the feedback linearization, especially in terms of robustness to uncertainties and the mitigation.
In conclusion, the extensive simulations conducted in this study have provided valuable insights into the behavior of the proposed controllers in the context of a biomechanical finger model. Considering physiologically relevant time frames and the rigorous analysis of tracking error and torque have contributed to a comprehensive controller performance. These simulations highlight the potential applicability of the sliding mode controller in real-world scenarios, particularly in the development of assistive technologies, and prostheses.
Sliding mode controller results
Simulation 1 (No boundary layer)
Simulation-1 is performed without a boundary layer by applying the control laws to the dynamic model represented by equation (1), equations (12) and (13). Figure 6 shows a tracking error at the start, but the controller tracks the perfect trajectory after the tracking error approaches zero after about
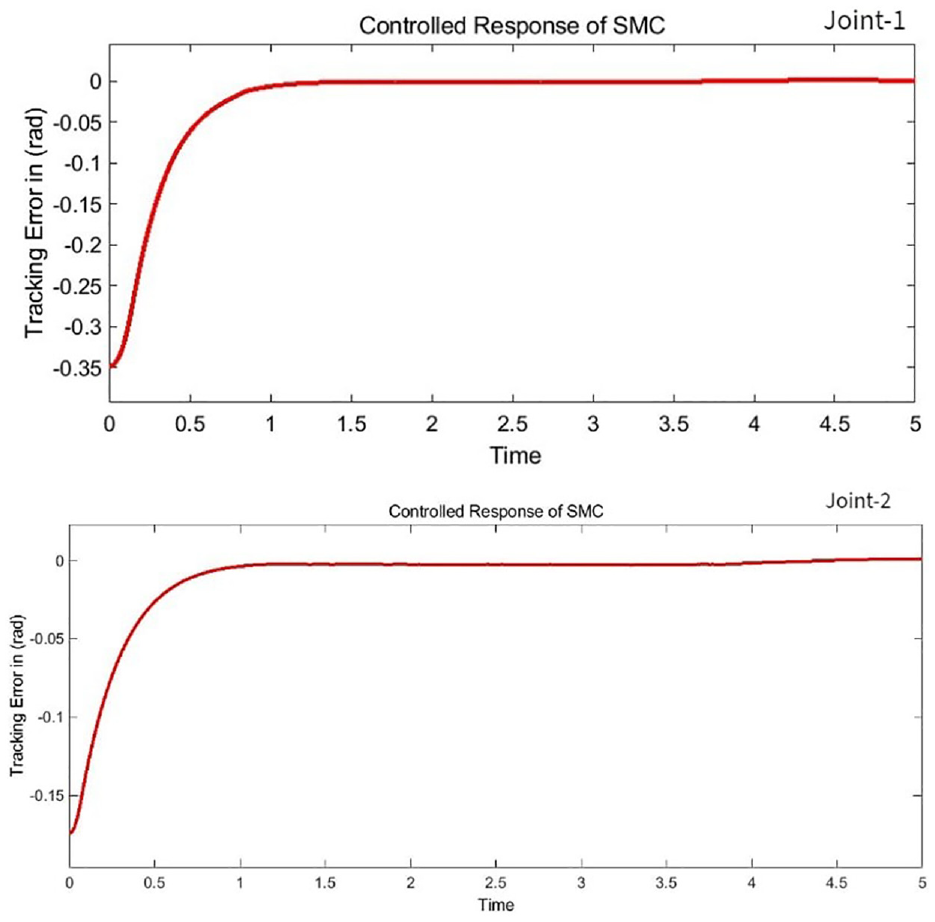
Controlled response of both joints.
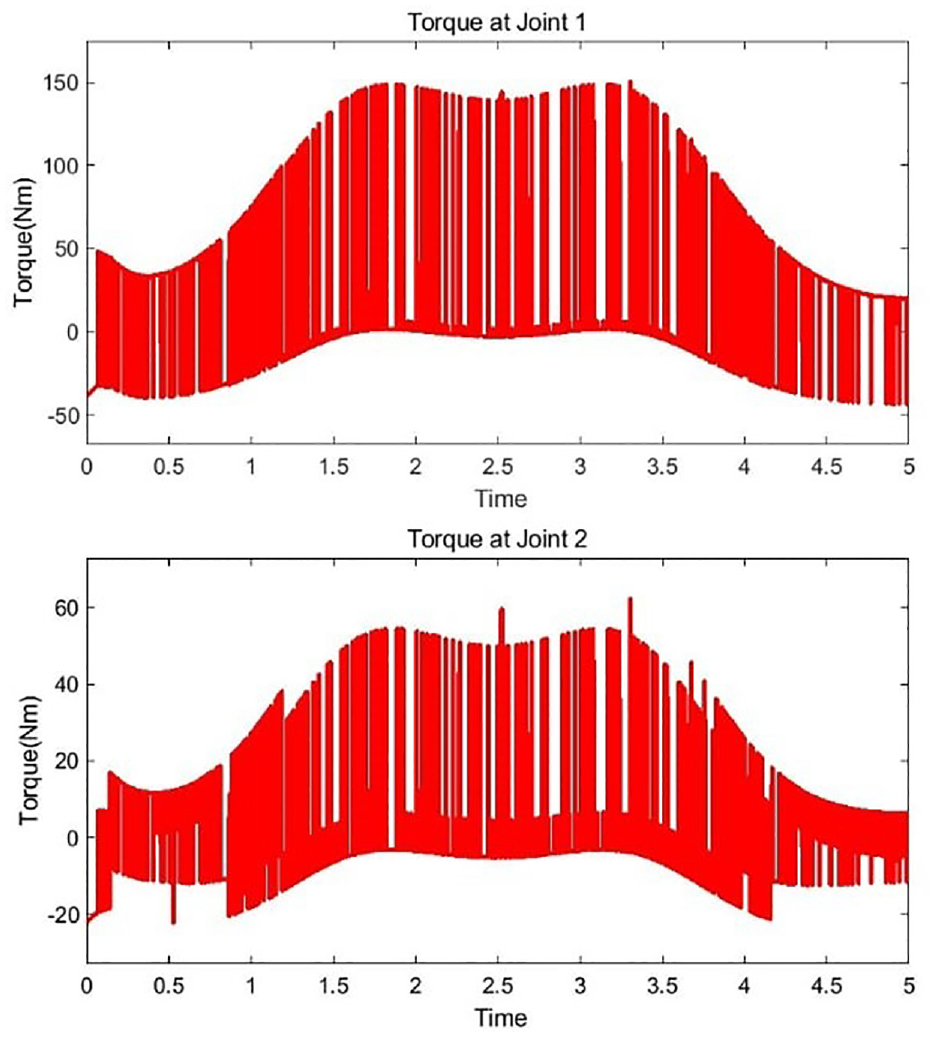
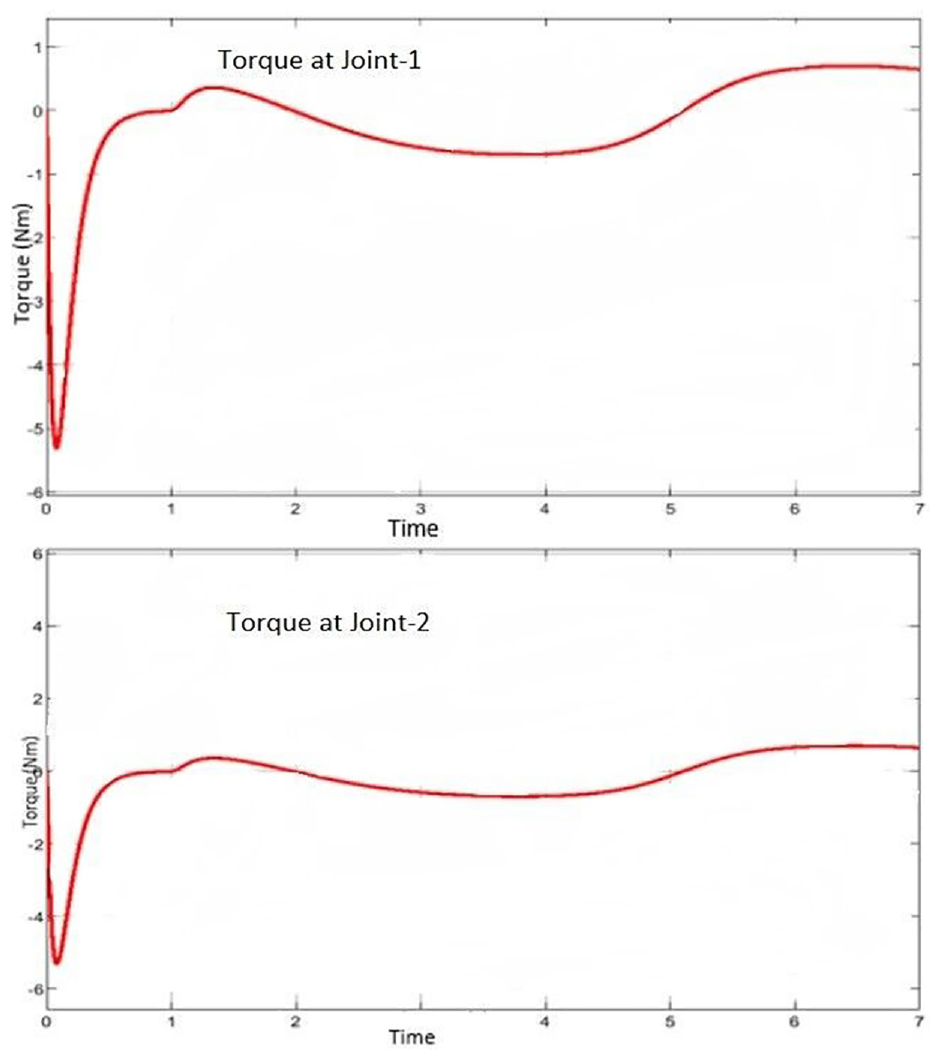
Torque at both joints. SMC torque at both joints.
Simulation-2 (Introducing boundary layer)
Simulation-2 is done with a boundary layer
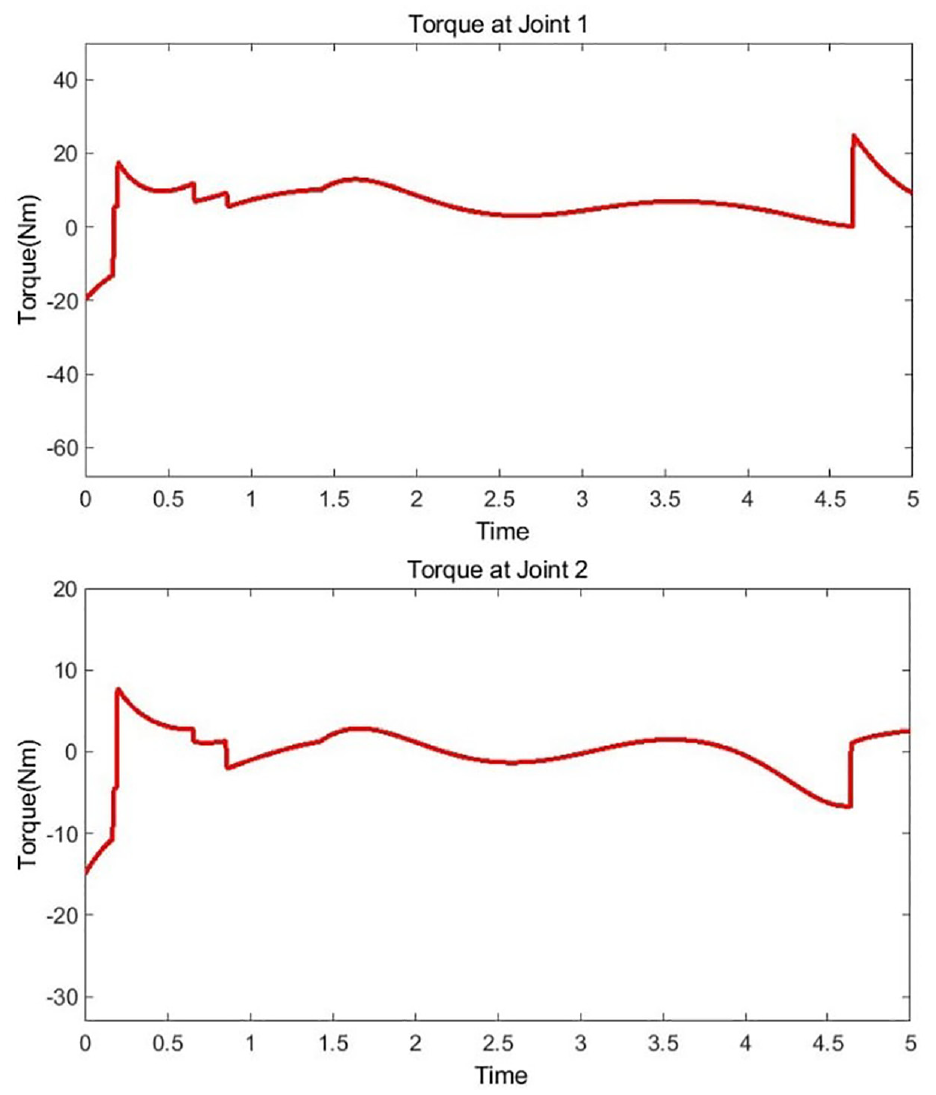
Torque at both joints. SMC torque with boundary layer at both joints.
Simulation-3 (Robustness test)
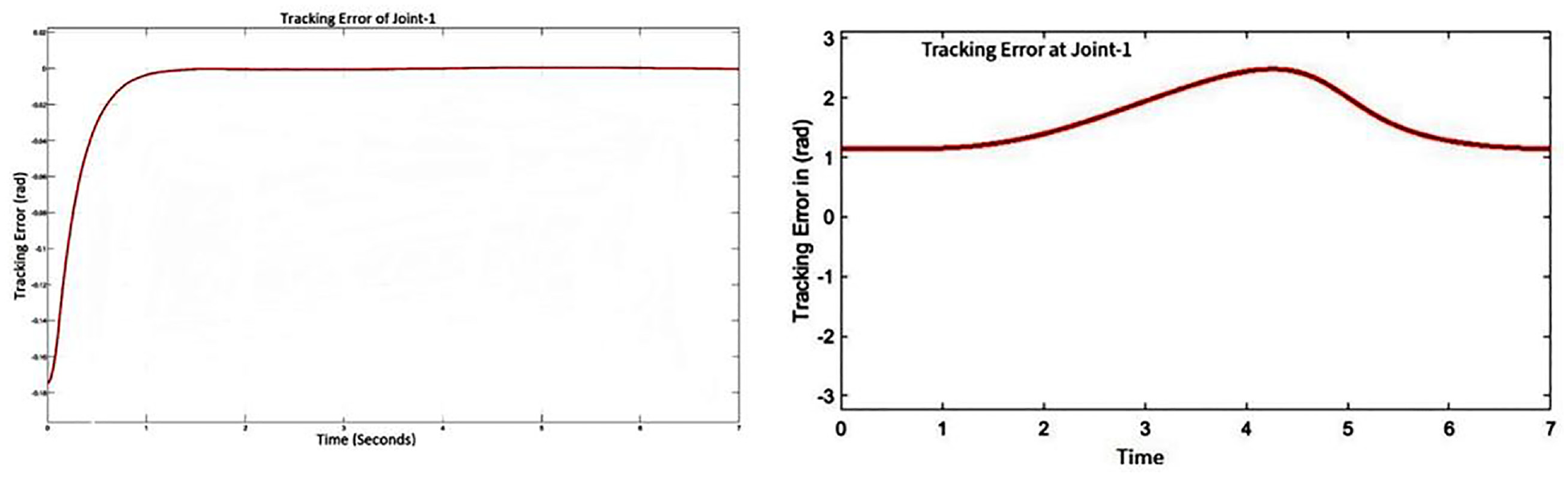
Simulation-3, shown in Figures 9 and 10, is the robustness test by adding 0.6 kg of mass to
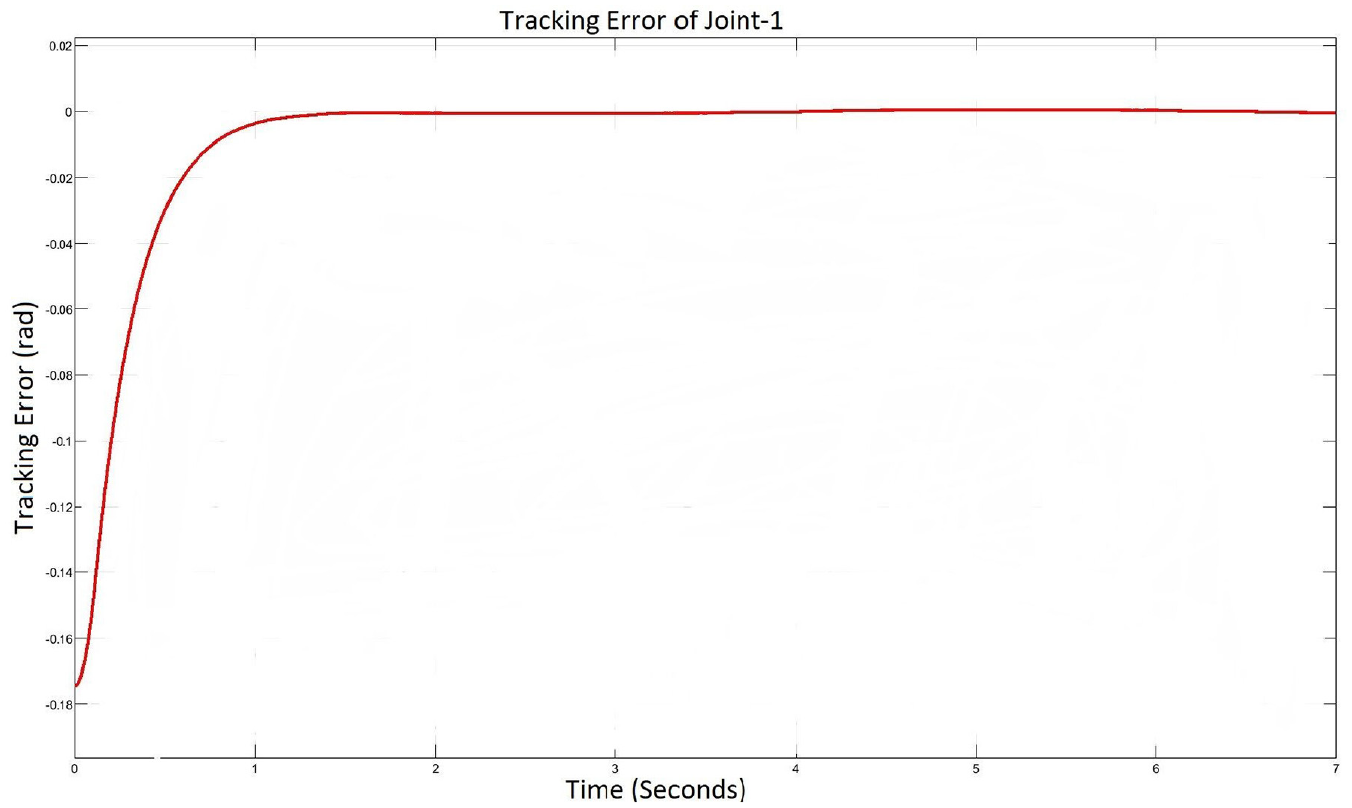
Tracking error of Joint-1.
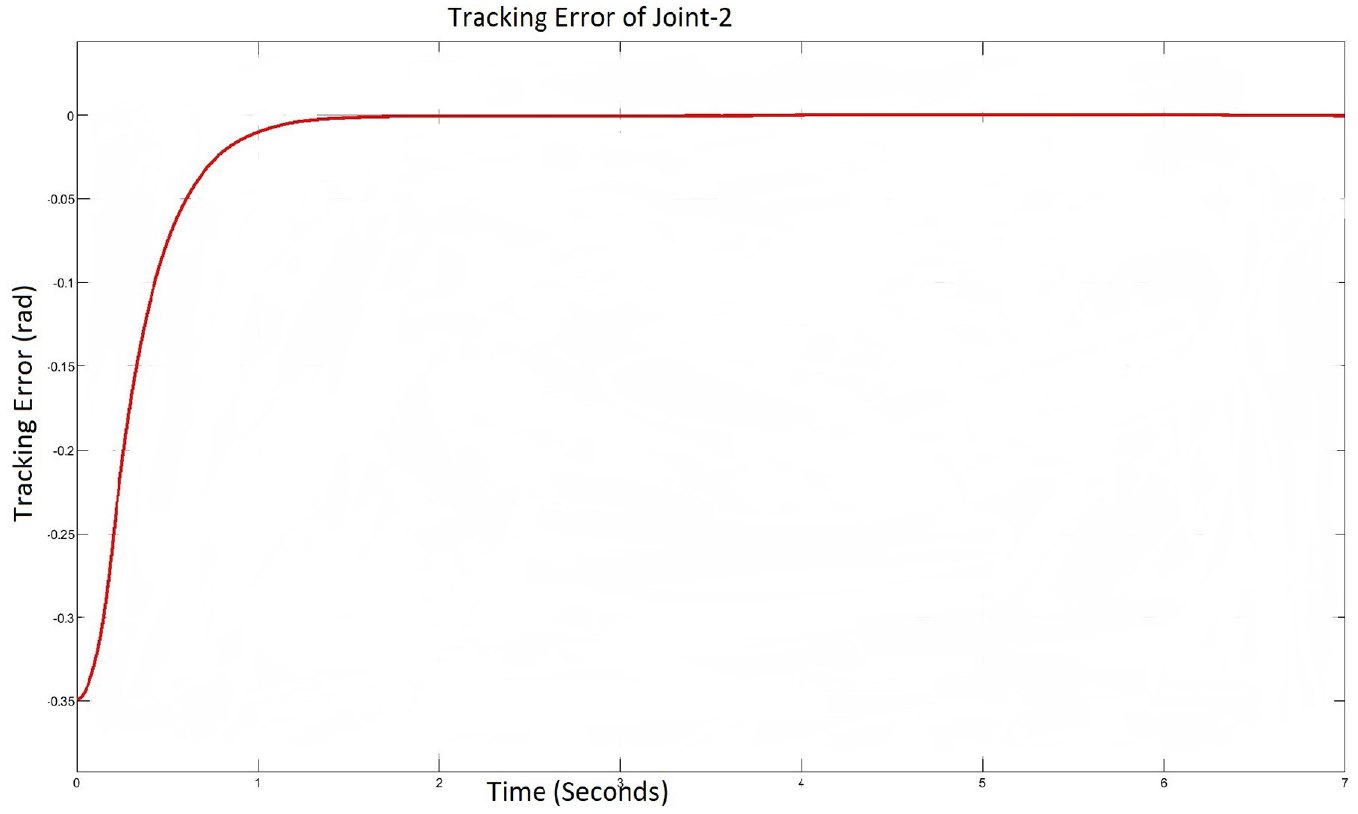
Tracking error of Joint-2.
Feedback linearization results
Figure 11 shows the tracking error of joint-1 and joint-2 when the controller equation is applied; we get controlled output graphs for both joints. Figure 12 shows the torque obtained using equation (18). Figure 13 shows the trajectory followed by the end effector. Asymptotical convergence of body joints can be watched through it by setting a time of 5 s. It will cover its initial to final position.

Controlled response of feedback linearization.
Torque at both joints. FLC torque at both joints
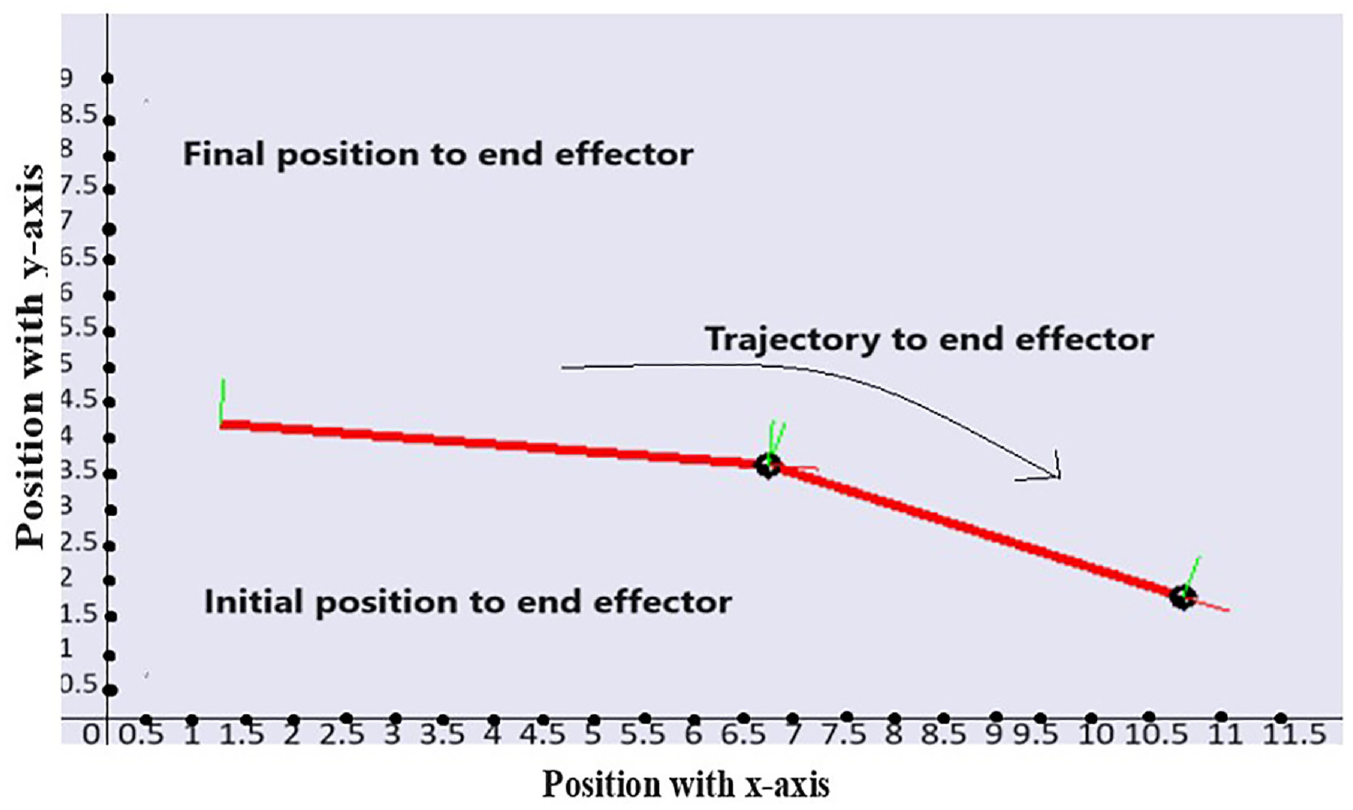
End effector result.
Comparison of sliding mode controller and feedback linearization
Two nonlinear controllers are used in this model; the first is a sliding mode, the other a feedback linearization. Both controllers are designed to reduce the higher order harmonics that occur in two two-finger models. Both controllers use a controlled input to produce a controlled output. The simulation results are presented in Figure 14 confirming the effectiveness of the controller our two-finger model. Comparing the results from the plots of the output shows that the feedback linearization is not very robust to uncertainties; meanwhile, the sliding mode controller has overcome the uncertainties. The sliding mode controller also introduces the boundary layer technique by solving the chattering problem (Table 1).
Comparison of sliding mode and feedback linearization controllers.
Performance comparison of the SMC and FLC control method.

A comparison of research results between the Sliding Mode Controller (SMC) and the Feedback Linearization Controller (FLC) applied to a two-fingers model is shown in Figure 14, confirming the effective control of the proposed two-finger model.
Performance results
Sliding Mode Controller (SMC): The SMC yielded better overall performance than the Feedback Linearization Controller (FLC). The SMC demonstrated improved tracking accuracy, robustness against disturbances and reduced steady-state errors when controlling the two-finger model.
Feedback Linearization Controller (FLC): Although the FLC performed quite well, it was outperformed by the SMC regarding overall performance. The FLC had relatively higher steady-state errors and was more sensitive to disturbances than the SMC.
Convergence speed
Sliding Mode Controller (SMC): The SMC showed faster convergence compared to the Feedback Linearization Controller (FLC). The control signal of the SMC reached the desired values faster, which led to a faster stabilization of the two-finger model. This faster convergence of the SMC can be attributed to its robustness and its ability to effectively cope with uncertainties and disturbances.
Feedback Linearization Controller (FLC): The FLC exhibited a comparatively slower convergence speed than the SMC. The control signal took longer to reach the desired values, which led to a slightly delayed stabilization of the two-finger model. The convergence speed of the FLC may have been affected by its sensitivity to disturbances and uncertainties.
The results of the research show that the Sliding Mode Controller (SMC) is superior to the Feedback Linearization Controller (FLC) in terms of overall performance and convergence speed when applied to the two-finger model. The SMC provided better tracking accuracy, robustness to disturbances, and faster convergence, while the FLC had relatively higher steady-state errors and slower convergence. These results suggest that the SMC is a more effective control strategy for controlling the two-finger model (Table 2).
Experimental validation of the controller by comparison with reference paper. 43

Experimental validation
To facilitate the experimental validation, a specific reference paper was selected.
43
In this paper, the flexion angles of both joints are examined, with values of
The third and particularly important comparison revolves around the maximum gain that is used. In the reference paper, the maximum gain values are given as
The fourth comparison relates to the parameter lambda
If the opening and closing times of the biomechanical finger model are within 1–2 s, then they are physiologically relevant. All values are therefore below the boundary conditions, which shows that the model is physiologically relevant.
Conclusions and future work
To summarize, our research efforts have revolved around the application of nonlinear control techniques to address the inherent complexities and nonlinearities of the two-finger model. In our dynamic and complicated world, nonlinearities are ubiquitous, making nonlinear control an indispensable tool for precise manipulation and trajectory control.
We have emphasized the importance of feedback mechanisms that create a closed system characterized by a remarkable robustness to uncertainties. Our main focus was on achieving precise end-effector trajectories, a crucial factor in improving the practical applicability of our research.
The precision of our end effector control was made possible by precise non-linear controllers that ensure the desired results are achieved even with slight variations over time. To facilitate this, we introduced a regressor matrix, a key element that helps identify unknown parameters within the robot dynamics.
Our robustness tests have shown that uncertainties, including unbounded variations, do not affect the asymptotic stability of the closed loop. Moreover, we have solved the difficult problem of flutter by introducing the adaptive boundary layer technique, which is an important contribution to our research. Here, replace signum nonlinearities with saturation nonlinearities. The simulation results presented here confirm the effectiveness of our two-finger model. The human hand, an incredible product of evolution, has inspired us in our work because it allows us to precisely replicate and control its intricate movements. Our model has the potential to revolutionize the field of prosthesis and assistive technologies.
Crucially, our research introduces two nonlinear controllers: the sliding mode controller and the feedback linearization controller. A comparative analysis shows that while both controllers excellently suppress the higher-order harmonics, the sliding mode controller exhibits higher robustness to uncertainties. It also successfully solves the problem of chattering thanks to the adaptive boundary layer technique.
The weaknesses identified in the present work point to several significant challenges that deserve attention. First and foremost, the complexity of implementing a two-finger prosthetic model with a nonlinear controller is a significant hurdle. This complexity requires a high level of expertise in biomechanics and control systems, which may exclude researchers and practitioners without this specialized knowledge. Secondly, the costs and resource demands associated with the development and maintenance of advanced prosthetic models are a concern. The financial impact of these resources may be prohibitive, especially in resource-constrained settings, limiting the widespread adoption of the proposed model.
Furthermore, the lack of sensory feedback, an important feature of many advanced prosthetic models, is a notable gap. The lack of haptic or tactile sensations in the current model could affect the user’s experience and control, highlighting an area that requires further exploration and improvement. Finally, it is important to address the durability and maintenance of prostheses, including the two-finger model presented. Over time, wear and tear can affect functionality, requiring a robust strategy for ensuring long-term usability and ease of maintenance. Addressing these weaknesses will enhance the overall robustness and applicability of the work and provide a more comprehensive basis for future research and practical implementations in the field of prosthetics.
Understanding the limitations of a research study is crucial for contextualizing its findings and ensuring their accurate application in practical scenarios. The field of prosthetics necessitates thoughtful consideration for effective implementation and user safety. First, individuals with severe disabilities must comprehensively understand the use of prostheses; however, this approach excludes those with mental disabilities. The integration of external control mechanisms that are detached from cognitive processes could broaden accessibility and appeal to a wider range of users.
Second, there are potential limitations for patients with pacemakers to use the two-finger prosthesis, primarily because they do not know if their pacemaker is compatible. Informed consent and compatibility testing are viable solutions that allow individuals with pacemakers to use this technology safely.
Moreover, while pregnant women generally do not experience adverse effects from the prosthesis, it is not advisable to use it without FDA approval. Regulatory approval is critical for the safety of use.
Additionally, the prosthesis is not suitable for individuals with cognitive impairments associated with attention deficits, emphasizing the urgent need for intelligent models of cognitive disabilities. This research gap presents an opportunity for future studies that will enable the development of inclusive solutions that can significantly enhance the quality of life of people with cognitive challenges. By addressing these limitations, researchers can pave the way for more inclusive and safe prosthetic technologies and extend their usability and impact to different user groups.
Our study addresses the complexity of nonlinear control techniques applied to the coordination of two fingers, involving different movements such as flexion and extension. In contrast to conventional linear control methods, our approach struggles with nonlinear load, velocity, position, and damping forces, which presents a novel and complicated control challenge. With a focus on robustness against uncertainties, we have overcome the complexity of implementing sliding control, selecting appropriate gain values, and ensuring stability while taking unpredictable system factors into account. In addition, the careful selection of parameters, including the critical
Intriguingly, our research has faced the challenge of experimental validation, which needs to be improved in many studies. This endeavor led to complex problems in hardware setup, data collection, and real-world validation, highlighting the practicality of our approach. Furthermore, we ensured that our model adhered to physiological constraints by targeting flexion angles within the ranges relevant to humans.
In conclusion, the contribution of our study goes beyond the usual and addresses the complexity of nonlinear control in the modeling of coordinated fingers. The challenges we encountered – nonlinearity, robustness, parameter selection, experimental validation, and physiological relevance – underscore that our work represents a significant leap forward in biomechanics and control research. Far from being a mere extension of existing methods, our work lays the foundation for advanced assistive technologies and prostheses and represents a significant contribution to the field.
In our research, we have made significant advances that distinguish our proposed method and technology from existing work and mark a paradigm shift in coordinated finger modeling, simulation, and analysis. One of the pioneering aspects of our study lies in the development and implementation of a nonlinear controller, a departure from conventional linear controllers. This groundbreaking approach enables precise and stable finger movements and improves control in a way that was previously unexplored in this field.
The clear advantages of our non-linear controller, especially the sliding mode control, are remarkable. This adaptive control mechanism operates within a variable structure, providing robustness to uncertainty and adapting seamlessly to changing conditions. One of the notable results of our research is the significant reduction in higher-order harmonics, a crucial improvement, especially in situations that require precise control and movement.
Crucially, our system exhibits remarkable robustness to uncertainties, a property that sets it apart from existing work. Since our approach remains in a sliding mode, it ensures stability even in the presence of unknown perturbations, making it highly reliable in real-world applications. Moreover, our method, which is based on linear parameterization, provides a structured framework for understanding and controlling the dynamic properties of the manipulator, which is a significant leap over previous work that lacks this structured approach.
In addition, the integration of an adaptation algorithm that sets limits based on the system state and tracking error dynamically improves control performance. This adaptive feature allows the system to adjust in real-time, adapting to changing conditions and ensuring consistent performance.
In our comparative analysis, which is described in detail in Section 5, we have systematically compared sliding mode control with feedback linearization control, clearly demonstrating the superiority of our approach. This comprehensive comparison provides valuable insights and shows that our method outperforms existing control strategies.
Moreover, our research includes experimental validation, a notable improvement that supports our findings with empirical evidence. By comparing our results with those of previous work, we increase the credibility of our approach and emphasize the practical applicability and effectiveness of our proposed method and technology in real-world scenarios.
In the future, we will investigate the application of other advanced nonlinear control techniques, such as gain scheduling and back-stepping, to further improve performance. The extension of our model to three, four, and five-finger hands is promising for the further development of assistive technologies. Since gain scheduling is based on multiple observable variables, it can effectively adapt to different working points. At the same provides stability even in complex nonlinear systems.
To summarize, our research is a testament to nonlinear control’s power in advancing robotic systems. The controllers introduced in this study represent the pinnacle of nonlinear control techniques that ensure system stability and precise control. The potential to extend and improve our model is enormous and offers exciting opportunities for future research and innovation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.