
Abstract
A new improved differential evolution constrained optimization algorithm is proposed to determine the optimum path generation of a rock-drilling manipulator with nine degrees of freedom. This algorithm is developed to minimize the total joint displacement without compromising the pose accuracy of the end-effector. Considering the rule for optimal operation time and smooth joint motion, total joint displacement and minimization of the end-effector pose error are respectively taken as the optimization objective and constraints. In the proposed algorithm, the inverse kinematics solution is computed by self-adaptive mutation differential evolution constrained optimization (SAMDECO) algorithm. Unlike conventional differential evolution (DE) algorithms, in the process of selection operation, the proposed algorithm takes full advantages of the information of excellent infeasible solutions in the contemporary population and scales the contribution of position constraint and orientation constraint. Consequently, the search process is guided to approach the optimal solution from both feasible and infeasible regions, which tremendously improves convergence accuracy and convergence rate. Some contrastive experiments are conducted with the basic self-adaptive mutation differential evoluton (SAMDE) algorithm. The results indicate that the proposed algorithm outperforms the basic SAMDE algorithm in terms of compliance of joints, which raises operation efficiency and plays an important role in engineering services value.
Keywords
Introduction
For operation in confined space and complex environment, traditional industrial manipulators are difficult to fill the practical demands due to the limitations of the working environment, actuators, size, and so on. As a kind of redundant heavy-duty manipulator, the rock-drilling manipulator is driven by hydraulic cylinders, which operates in a narrow underground mining tunnel. Define a set of target points describing the desired end-effector path in the Cartesian space, and it becomes necessary to obtain the joint configuration at each desired pose to accomplish the task. This is known as inverse kinematics. More degree of freedom (DOF) for a manipulator can increase agility, guarantee obstacle avoiding, and expand its operational reach. However, it may result in multiple joint configurations to reach the same end-effector pose and gives rise to the problem of selecting the optimum solution among them. Therefore, to achieve optimization, additional control criteria must be added like obtaining a smooth joint motion, 1 acquiring collision-free joint paths, 2,3 and so on.
Determining the inverse kinematics solution of a manipulator with a high DOF is a complex process. Different solution techniques for inverse kinematics can be categorized into two major classes: closed-form analytical and numerical methods. 4 –7 Each method has its own advantages and disadvantages. Closed-form methods involve solving complex transcendental equations to obtain a set of joint angles, which are applicable to models with three joint axes having a common intersection. Numerical methods, which are essentially based on numeric analysis of Jacobian matrix, are iterative approach to solving inverse kinematics problem. Sometimes, Jacobian is non-invertible at singular points. 6 Besides, the quality of the solution depends on the set of starting values. Hence, much effort has been made by a bunch of researchers to develop metaheuristic algorithms to solve the inverse kinematics problem, such as genetic algorithm (GA), 8 particle swarm algorithm, 9 and differential evolution (DE). 10 Most aforementioned research work only considers pose accuracy while ignoring the uniqueness of the solution.
The motivation behind this article is to propose a metaheuristic algorithm to determine the optimal path generation problem 1,3,11 of the rock-drilling manipulator. Given a set of target points describing the desired end-effector path in the Cartesian space, an optimal joint path is obtained with minimum joint displacements while guaranteeing pose accuracy of end-effector. In recent years, inverse kinematics of manipulator with the objective of “optimal operation time” 12 and “best compliance,” 6 that is, a smooth joint motion 1 has become a research hot spot for scholars at home and abroad. Weighted sum method 1,4 has been especially used to solve the inverse kinematics problem associated with the manipulator optimal path generation, which transforms the pose accuracy and best compliance into an optimization function by linear weighting. Afterward, metaheuristic algorithms are employed to solve the optimal solution of the function. But the convergence of the algorithm lies in the right selection of the weights to characterize the decision makers’ preferences. In recent years, using metaheuristic algorithms to solve constrained optimization problems (COPs) 13 –16 has attracted wide attention. In general, methods based on preserving feasibility of solutions 13 and penalty functions 13 are undoubtedly the most widely applied with all types of nonlinear optimization algorithms. Mehrafsa et al. 17 propose a multistep GA based on simple genetic algorithm (SGA) to solve the inverse kinematics problem of the redundant open chain manipulators. Firstly, the SGA finds successive joint values set as candidates, and then the optimum joint values would be selected. Using the method, the end-effector would be smoothly moved from an initial location to its target with minimum joints displacement. However, the method requires a feasible starting point for the search process and often results in sticking into a suboptimal solution. Yang et al. 6 add penalty function to fitness function and utilize GAs to solve the inverse kinematics associated with the optimization criteria of best compliance. However, penalty function methods require setting additional search parameters, such as various penalty parameters or weighting factors for individual constraint functions, which affect convergence performance.
In this work, we propose the use of self-adaptive mutation differential evolution constrained optimization (SAMDECO) algorithm to solve the optimum manipulator path generation as a COP. Initially, we define an objective function to minimize the total joint displacement 18 between the previous and the actual joint configurations. The objective function takes into account constrained conditions, the minimal error between the desired and actual end-effector pose. To overcome COP effectively, we improve the selection mechanism and balance the influence weights of different constraints. Taking full advantage of the information of excellent infeasible solutions in the contemporary population, the search process is guided to approach the optimal solution from both feasible and infeasible regions. Hence, the proposed approach estimates the feasible manipulator configuration with minimum joint displacement.
Our main contributions are summarized as follows. Firstly, considering the rule for optimal operation time and smooth joint motion, optimum path generation of the rock-drilling manipulator is solved based on SAMDECO algorithm. Additionally, the proposed method does not suffer from singularity configurations. Finally, the approach can be applied to different manipulator structures with n DOF.
The rest of the article is organized as follows: In the “Mathematical model” section, we will introduce the mathematical model of manipulator optimal path generation problem. In the “Proposed algorithm” section, we will describe the details of our algorithm. In the “Benchmark functions” section, we will test the performance of the proposed algorithm on 5 benchmark functions. In the “Experimental results” section, we present and compare the experimental results obtained using the proposed algorithm and other algorithms. The last section concludes the article.
Mathematical model
Structure of the 9-DOF rock-drilling manipulator
The experiments are designed based on the 9-DOF rock-drilling manipulator shown in Figure 1. The three-dimensional (3-D) structure diagram of the rock-drilling manipulator with six rotational joints and three prismatic joints is shown in Figure 2. The triangle-arranged cylinders, Cb1 and Cb2, control up-and-down pitching motion and left-and-right swing of arm body. The triangle-arranged cylinders, Cf1 and Cf2, control up-and-down pitching motion and left-and-right swing of the propeller. The screw cylinder Cr realizes the rotation motion of propeller. The up-and-down pitching motion of propeller relative to the bracket is completed by hydraulic cylinder Cl. The cylinder Ce control forward-and-backward motion of prolusion compensating beam. The cylinder Cm realizes telescopic motion of arm body. The cylinder Cd realizes drilling operation. During the positioning process, Cm and Cd are locked. Therefore, the structure of the manipulator can be defined consisting of seven joints.

Nine-DOF rock-drilling manipulator. DOF: degree of freedom.

The 3-D structure diagram of manipulator.
Establishment of forward kinematics equation
The forward kinematics is described as the mapping from joint space to Cartesian space, which computes the pose of the end-effector. We use Denavit–Hartenberg (DH) convention for the representation of forward kinematics, which establishes the coordinates for each joint and then calculates the pose matrix through homogeneous transformation between each adjacent joint coordinate. The joint coordinate system diagram of the manipulator is shown in Figure 3. The four DH parameters,

The joint coordinate system diagram of manipulator.
DH parameters for rocking-drilling manipulator.
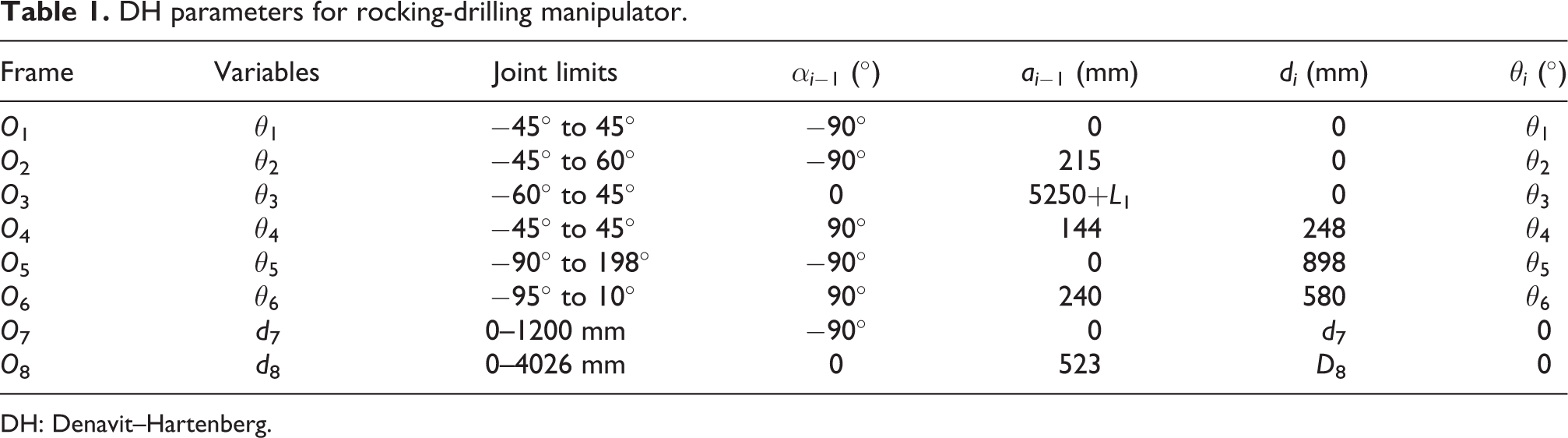
DH: Denavit–Hartenberg.
In Table 1, L 1 represents the telescopic length of arm body, which ranges from 0 to 2200 mm.
Then, the homogeneous matrix

where
When the matrix transformation between each two adjacent joint coordinate systems is determined, the total transformation matrix that links the position and orientation of the end-effector relative to the base frame is given in equation (2)

Establishment of the objective function
The path generation problem is formulated as a COP, defined according to the task. The rock-drilling manipulator is a hydraulic-driven manipulator which adopts a load sensing system. The working mode of single pump driving multi-actuator may lead to flow saturation under some working conditions because the flow provided by the hydraulic pump is insufficient to meet the demand of the load. To simplify the model, this article considers that the hydraulic pump is under the condition of full load and ignores the influence of flow rate in the starting and stopping process of the solenoid valve. The total joint displacement is the minimum, and the total oil intake of each hydraulic cylinder is correspondingly the minimum. Therefore, the oil supply time for the hydraulic pump is the shortest, and the movement time for the manipulator is correspondingly the shortest. The aim here is to minimize the total joint displacement to obtain smooth joint transitions between target points while setting terms guaranteeing the end-effector pose accuracy.
The objective function is shown in equations (3) to (5).
Minimize

subject to


where
Desired pose matrix is shown in equation (6)

where R t and P t represent desired rotation matrix and desired position matrix, respectively.
Estimated pose matrix is shown in equation (7)

where R a and P a represent estimated rotation matrix and estimated position matrix, respectively.
Position error E p is obtained by calculating the Euclidean distance between desired position matrix P t and estimated position matrix P a, as shown in equation (8) 8

The error in end-effector orientation is defined by the rotation matrix R error, which is given in equation (9) 8

In this work, the quaternion representation is used for calculations of the orientation error. If R
error is shown in the quaternion representation by

Proposed algorithm
Basic DE algorithm
DE algorithm is a simple, effective, and real parameter stochastic optimization algorithm in current use. DE uses similar procedures as standard evolutionary algorithms, including mutation, crossover, and selection.
19
However, unlike conventional evolutionary algorithms, DE uses proportional difference vectors generated by randomly selected individuals to disturb the current population. We explain each stage separately as follows. 1. Initialization of population: The initial population is generated by randomly sampling the feasible search space defined by joint bounds, as shown in equation (11)

where
2. Mutation operation: Three distinct parameter vectors,

The DE/best/1/bin mutation operation is outlined in equation (13)

where F is called the difference vector scale factor, which is set in [0,2].
3. Boundary constraint handling operation: Some mutant vectors generated by mutation operation may exceed the joints’ upper and lower bounds. There are many boundary constraint handling operators and the most common method is random scheme.
20
If

4. Crossover operation: To enhance the diversity of the population, a crossover operation comes into play. The detailed operation is obtained in equation (15)

where
5. Selection operation: The next operation calls for selection to determine whether the target vector x or the trial vector v survives to the next generation by adopting a greedy selection operator. If the trial vector v has a better objective function compared to the target vector x, it is accepted as a new parent vector for the next generation. Otherwise, the target vector x is retained to the next generation. The selection operation is described in equation (16)

where f is the objective function to be minimized.
Self-adaptive mutation differential evolution constrained optimization algorithm
The proposed algorithm is used to determine the optimum path generation solution of the rock-drilling manipulator. The main issue is to determine the joint angle according to the pose of the end-effector. Compared with basic DE, SAMDECO algorithm proposed in the article has the same procedures except for mutation operation and selection operation.
Different mutation operators have their own advantages and disadvantages. The mutation operator based on “rand” can effectively maintain the diversity of population and possess good global exploration ability but will decelerate convergence rate seriously. The mutation operator based on “best” takes the parameter vector with best fitness in the contemporary population as a base vector, which has good local exploitation ability and fast convergence rate, but easy to fall into local optimal solution, causing search stagnation and premature convergence. Considering the advantages of two mutation operators, a new self-adaptive mutation operator is proposed based on Wu et al. 21 The mutation operator is shown in equation (17)

where
For unconstrained optimization problems, if the trial vector has a lower objective function value than the corresponding target vector, the trial vector will replace the target vector to be a member of the population comprising the next generation. Unlike unconstrained optimization problems, COPs divide the search space into feasible and infeasible regions. In solving COPs, the feasibility of a solution is a necessary condition that requires the conversion of some infeasible individuals to feasible ones. The key step is the selection mechanism. In this article, the selection mechanism is improved as recommended in Zheng et al. 15
Before describing the selection mechanism in detail, we should know about several conceptual frameworks. G(x) represents the sum of constraint violation for parameter vector x and the scheme may be outlined in equations (18) and (19)



where θ represents the ratio of allowable constraint relaxation to each evolution generation. Accordingly, the ratio of allowable constraint relaxation (
If
The selection mechanism in Zheng et al.
15
is outlined as If both the parameter vectors are feasible, the one with lower objective function value is better. If both the parameter vectors are infeasible, the one with lower constraint violation is better. If the one is feasible and the other is infeasible, it can be discussed in two cases. (1) If the infeasible parameter vector is an acceptable solution, then compare the objective function value of the feasible parameter vector and infeasible parameter vector and the smaller one is obtained. (2) If the infeasible parameter vector is an unacceptable solution, then the feasible parameter vector is obtained.
In this article, there are two constraints, position and orientation, with different dimensions and orders of magnitude. To scale the contribution of position and orientation, G(x) is redefined in equation (21)

where p 1 and p 2 represent weighting factors of position constraint and orientation constraint, respectively, to normalize the corresponding values in equation (21). We propose to choose p 1 and p 2 suggested in Tabandeh et al. 8 as shown in equations (22) and (23)


where λ is the total length of all the links of the manipulator and P d is the Euclidean distance between the task point and the base of the manipulator, which is obtained in equation (24)

The maximum possible orientation error occurs in

Proposed algorithm’s flowchart.
Benchmark functions
To verify the performance of the proposed algorithm, the algorithm is tested on five benchmark functions in Appendix. To validate the performance of each function fairly, the population size is uniformly set at 100. All runs are terminated after 1000 generations. After each function is run 50 times independently, the mean value and the standard deviation corresponding to the optimal fitness value are taken as the evaluation criteria of search performance. The results of 50 independent running tests are listed in Table 2. As shown in Table 2, the standard deviations of five benchmark functions are very small, which indicates the robustness of SAMDECO algorithm.
The test results obtained by SAMDECO algorithm through 100 independent runs on five benchmark functions.
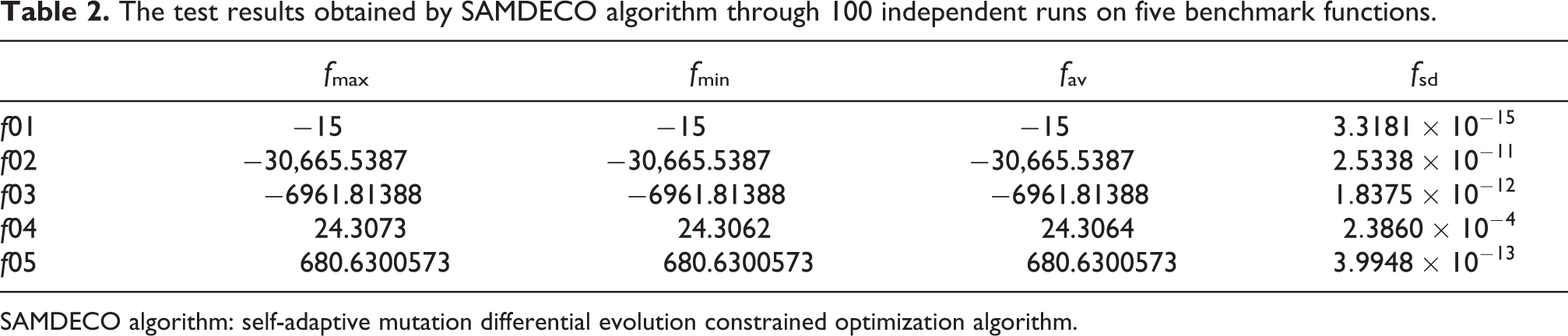
SAMDECO algorithm: self-adaptive mutation differential evolution constrained optimization algorithm.
Experimental results
The performances of the proposed algorithm in solving the optimum path generation problem of the rock-drilling manipulator are validated by performing simulations, which will be described in this section. The simulations are divided into three parts. In part 1, SAMDE algorithm with improved selection mechanism and unmodified selection mechanism respectively are compared to determine the convergence performance of these models in computing inverse kinematics solution of the rock-drilling manipulator. In part 2, the proposed algorithm and SAMDE algorithm with unmodified selection mechanism are compared to determine the performance of these algorithms in avoiding multiple solutions. In part 3, the proposed algorithm and the basic SAMDE are compared to determine the performance of these algorithms in improving compliance of joints for optimum path generation problem.
The analysis of algorithm convergence
The performance between SAMDE algorithm respectively with unmodified selection mechanism and improved selection mechanism in computing the inverse kinematics solution of the rock-drilling manipulator is presented in this section. Accordingly, mutation scale factor (F = 0.5), crossover rate (Cr = 0.8), and population size (Np = 100) are set based on the values suggested by Ronkkonen et al. 22 The larger the ε is, which means the farther away from the feasible domain, the greater the probability of obtaining the globally optimal solution is. In this article, the initial limit for the sum of the constraint violation, ε(0), is 10.
It can be seen from Figure 5 that SAMDECO algorithm enjoys a distinct advantage over convergence performance. To achieve position accuracy of 0.1 mm, SAMDECO algorithm needs 250 iterations while 450 iterations for unmodified selection mechanism. To achieve orientation accuracy of 0.0001 rad, SAMDECO algorithm needs 200 iterations. SAMDE algorithm with unmodified selection mechanism does not scale the contribution of position constraint and orientation constraint, which makes the relative importance of orientation constraint lower than position constraint. As a result, it is difficult to achieve the orientation accuracy of 0.0001 rad for unmodified selection mechanism. The convergence accuracy of SAMDECO algorithm can reach 10−3 for 540 iterations and 10−7 for 1000 iterations. The evolution direction of the population for SAMDE algorithm with unmodified selection mechanism is difficult to approach a feasible domain, so the globally optimal solution cannot be searched.

Convergence process for 1000 iterations: (a) total joint displacement, (b) position accuracy, and (c) orientation accuracy.
Experiments for avoiding multiple solutions
To compare the performance of avoiding multiple solutions for SAMDE algorithm respectively with improved selection mechanism and unmodified selection mechanism, 50 repeated positioning experiments are carried out and 10 data sets are recorded, including maximum value (f
max), minimum value (f
min), the average value (f
av), and standard deviation(
Performance comparison for repeated positioning experiments.a

aBoldface values emphasize improved result.
Note: The standard deviation of improved mechanism is extremely small which means SAMDECO algorithm is capable of obtaining a globally optimum solution minimum joints displacement.
The standard deviation of improved mechanism is extremely small which means SAMDECO algorithm is capable of obtaining a globally optimum solution minimum joints displacement.
Experiments for multiple points
To demonstrate that SAMDECO algorithm is applicable for improving compliance of joints and increasing operation efficiency, a trajectory composed of 11 target points is given in the Cartesian space, and basic SAMDE algorithm and SAMDECO algorithm are respectively conducted to solve optimum path generation problem. The desired position and orientation coordinates {xk yk zk αk } at each target point are presented in Table 4.
Desired position and orientation coordinates.

Relative to the previous pose, rock-drilling manipulator moves to the present pose with minimum total joint displacement through SAMDECO algorithm. At the initial stage of evolution, infeasible solutions with better objective function near the feasible domain are inserted in the population. In the process of evolution, the allowable constraint relaxation degree decreases gradually, which reduces the number of infeasible solutions in the population. The population is entirely composed of feasible solutions until the allowable constraint relaxation degree is 0. Therefore, SAMDECO algorithm is able to obtain a globally optimum solution and guarantee the uniqueness of the solution. However, the basic SAMDE algorithm only considers the objective function of pose accuracy without taking into account compliance of joints. The results are shown in Figure 6. It is obviously illuminated that SAMDECO algorithm obtains a smoother curve for total joint displacement, which embodies the compliance of joints and increases operation efficiency on a certain extent.
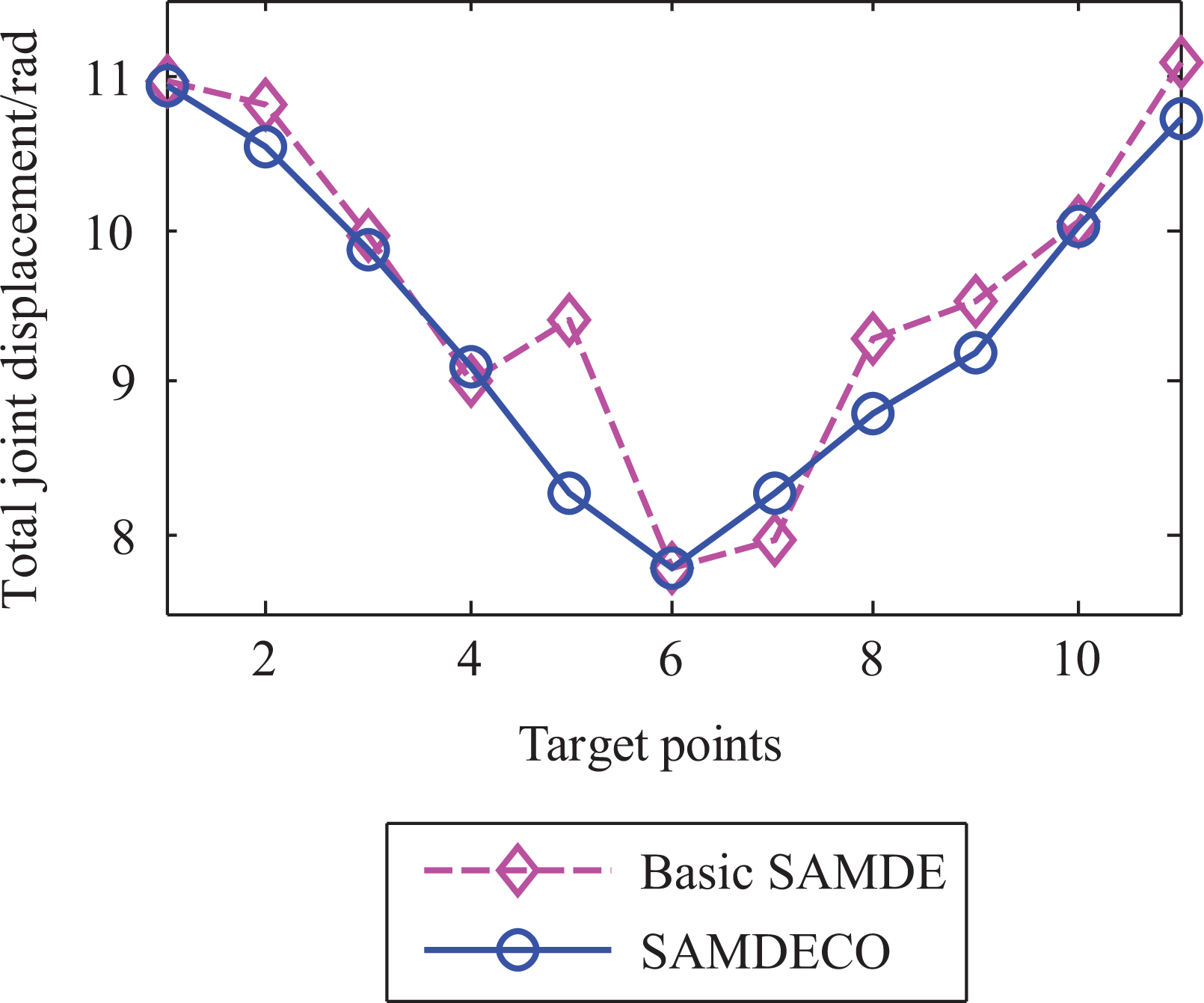
Total joint displacement variation curve.
Conclusion
In this article, a new improved DE constrained optimization algorithm is proposed to solve the optimum manipulator path generation problem. By means of forward kinematics analysis through DH convention, nonlinear equations are established to solve optimum path generation. Total joint displacement and minimization of end-effector pose error are respectively taken as an optimization objective and constrained conditions. The nonlinear equations are transformed into an optimization problem, and the optimum path is searched using SAMDECO algorithm.
In the process of selection operation, the proposed algorithm takes full advantages of the information of excellent infeasible solutions in the contemporary population and scale the contribution of position constraint and orientation constraint. Consequently, the search process is guided to approach the optimal solution from both feasible and infeasible regions, which tremendously improves convergence accuracy and convergence rate. The globally optimal solution can be obtained rather well.
Given a series of target points in the Cartesian space, SAMDECO algorithm is conducted to solve optimum path generation problem. A major contribution of this approach is the acquisition of minimization of total joint displacement without compromising the end-effector pose accuracy. The results indicate that SAMDECO algorithm significantly improves the compliance of joints and increases operational efficiency.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Appendix
All benchmark functions are described in Runarsson and Yao. 23 They are summarized here in detail.