
Abstract
As one of the challenging tasks of multiple autonomous underwater vehicles systems, the realization of target hunting is the great significance. The multiple autonomous underwater vehicle target hunting is studied in this article. In some research, because the hunting members cannot reach the hunting point at the same time, the hunting time is long or the target escapes. To improve the efficiency of the target hunting, the leader–follower formation algorithm is introduced. Firstly, the task is assigned based on the distance between the autonomous underwater vehicle and the target. Then, the autonomous underwater vehicles with the same task are formed based on leader–follower mode, and the formation is kept to track the target. In the final capture phase, multiple autonomous underwater vehicle system use angle matching algorithm to round up target. The simulation results show that the proposed algorithm can effectively accomplish the target hunting task, save the hunting time, and avoid the target escape. Compared with the bioinspired neural network algorithm, the proposed algorithm shows better performance.
Keywords
Introduction
As the complexity of underwater missions increases, it is difficult for a single autonomous underwater vehicle (AUV) to complete the task. 1,2 Multi-AUV collaboration has become a hot topic of research. Target hunting is one of the challenging tasks in multi-AUV systems. 3,4 There have been many studies on the target hunting of multi-robots and some results have been achieved. For example, Cao et al. 5 proposed a distributed control algorithm based on local collaboration to achieve multi-robot hunting of targets. The algorithm improves the hunting success rate through collaboration. Song et al. 6 established a steady-state mathematical model for multi-robot hunting behavior and improved the stability of target hunting. Denzinger and Fuchs 7 proposed a target hunting strategy that combines neighborhood rules and genetic algorithms. The algorithm classifies the current state with the nearest neighbor rule and then applies the genetic algorithm to optimize the hunting behavior. These algorithms are capable of achieving target hunting and can optimize the path of the hunting. However, they may cause a target hunting failure in changing environments.
Negotiation and calculation are common methods for resolving target hunting but can lead to delays in robotic action. 8 –10 When the environments change, robot spends more time replanning the path, so these methods are not suitable for target hunting in a dynamic environments. Yamaguchi 11 studied the target hunting in dynamic environments based on Hilare-type mobile robot and solved the hunting problem using smooth time-varying feedback control method. This control strategy improves efficiency, but the robot may fall into a “dead zone” in a complex environments with a large number of obstacles.
To solve the impact of the environments on target hunting, the potential field function is constructed for the environments and embedded in the hunting algorithm to achieve target hunting in complex environments. For example, Wu et al. 12 and Cao et al. 13 applied the artificial potential field and the limit cycle algorithm to the formation control to complete the cooperative hunting. Cao et al. 14 used the environmental potential field function to adjust the fitness function of the Particle Swarm Optimization (PSO) algorithm to adapt to the complex hunting environments. Rasekhipour et al. 15 proposed a predictive path controller based on potential field function to control multi-robots to achieve target hunting. The introduction of the environmental potential field improves the adaptability of the algorithm, but the efficiency of the hunting is still to be further improved.
Inspired by the good performance of bioinspired neural networks (BNN) in complex systems, Ni and Yang 16 applied BNN to real-time cooperative hunting in unknown environments. The results show that the proposed algorithm can guide the robots to effectively capture the targets and be able to handle the failure in the hunting process. However, the disadvantage of using the BNN planning path is that the computational complexity is high and the path planning time is long.
These studies are based on the target hunting problem of multiple mobile robots. The underwater hunting is more complicated than the ground hunting. Not only is the three-dimensional (3-D) environments, but each AUV has six degrees of freedom. Nguyen and Hopkin 17 and Williams 18 modeled AUV ore-seeking and applied a full coverage method to achieve hunting. However, the algorithm only studies the hunting of static targets without intelligence. Huang and Zhu 19 studied the multi-AUV target hunting problem based on BNN model. The algorithm uses distance-based negotiation for task assignments. Simulation experiments are carried out in 2-D and 3-D environments. The proposed algorithm can automatically handle various states and capture targets efficiently. However, the hunting fails because of the conflict. Later, Cao et al. 20 proposed a local prediction method to resolve conflicts. AUVs participating in the hunting are predicting the behavior of other AUVs to avoid conflicts before they act. Compared with the artificial potential field algorithm, the algorithm reduces the navigation distance. However, in the literature, 17–20 the hunting team was formed before the negotiations, and sometimes it is unreasonable. Chen and Zhu 21 proposed a hunting algorithm that combines Glasius bioinspired neural networks (GBNN) and reliability functions. The algorithm solves the hunting of heterogeneous multi-AUV pairs with intelligent targets in a dynamic multi-obstacle underwater environments. Ni et al. 22 divided the multi-AUV target hunting into two stages: search and capture. An improved spinal nervous system algorithm to control the search formation in the search phase. In the capture phase, a dynamic alliance method based on two-way negotiation strategy and a pursuit direction allocation method based on improved genetic algorithm are proposed, which can effectively achieve the pursuit task. The common problem with these algorithms 17–22 is that the hunting time increases and the target escapes when some AUVs fail to reach the containment points at the same time.
In this article, the leader–follower formation algorithm is introduced into the multi-AUV hunting algorithm to solve the problems of long hunting time and target escaping in the hunting process. The AUVs that assign the same task are formed, and multiple AUVs keep the formation to track the target. Capture the target as the formation approaches. The specific process is as follows: firstly, the task is assigned according to the distance between the AUV and the target, and the nearest AUV forms a hunt team; then, the hunt team is formed in a V-shape and maintains the formation tracking target; and finally, when the formation is close to the target, the hunting point is determined according to the angle matching algorithm. Each AUV, respectively, reaches the corresponding hunting point to achieve the target capture. To prove the performance of the proposed algorithm, the target hunting was simulated in different scenarios. The simulation results show that the proposed algorithm can accomplish the hunting of moving targets. Compared with the BNN algorithm, the algorithm has higher success rate and shorter hunting time.
The main contributions of this article are (1) simulation in a 3-D underwater environments with underwater mountains, testing closer to the real environments; (2) the hunting strategy integrates algorithms such as leader–follower formation and angle matching to improve the hunting performance; and (3) through task assignment, formation tracking, and capturing targets, the capture time is shortened and the target escape is avoided.
The rest of the article is structured as follows: the “AUV kinematics model” section gives the model of the AUV; the algorithm design is given in the “Algorithm description” section; the “Simulation research” section gives the simulation test of the proposed algorithm; and finally, the conclusion and outlook for this article is given in the “Conclusion” section.
AUV kinematics model
To describe the navigation of the AUV, two coordinate systems are established: the body-fixed frame system {B} and the inertial frame system {E}. 23 A 3-D Cartesian workspace is shown in Figure 1.

Coordinate systems.
Inertial frame system
The inertial frame system takes a point E on the land or ocean as the origin. The EX axis and the EY axis are in the same horizontal plane, and the EY axis by the right-hand rule is EX axis clockwise rotate 90°. The EZ axis is perpendicular to the plane of the EX and EY axes, and the positive direction is the direction pointing to the center of the earth. The AUV position can be represented by the inertia coordinate
Body-fixed frame system
The body-fixed frame system takes the center of gravity of AUV as the origin O, the vertical axis
Kinematic model
The state quantities of AUV such as velocity and acceleration are measured in the body-fixed frame system. The control vector of the AUV is generated by the motion controller, and the path and velocity of the AUV obtained in the inertial frame system need to be converted into the body-fixed frame system.
For the convenience of calculation, the position and angle information of the AUV are described in the inertial frame system, and the speed and angular velocity information are expressed in the carrier coordinate system, as described below 24,25



The position under the inertial frame system and the velocity in the body-fixed frame system are transformed as follows

Reverse conversion to get the speed value:

where

The angular velocity in the inertial frame system and the angular velocity in the body-fixed frame system are transformed as follows

where

In summary, the AUV kinematics equation is obtained, as shown in equation (4)

Dynamic model
Typically, an AUV is usually required to move close to the deep-sea bottom with complex terrain. When it moves to resist the ocean current in deep sea, the AUV’s motion status will be in large drift angles. When it is required to move at a low forward/rotational speed, the nonlinear characteristics are strong with maneuverability hydrodynamic forces of the AUV. It is necessary to make special mathematical model for some situations. To give a more clear explanation for the latter control approach, the dynamic equation of AUV can be presented as a compact vector form 26

where
As mentioned earlier, the system dynamics are not exactly known. The system dynamics can be divided into two parts: estimated dynamics

where
Algorithm description
In this article, m AUVs in a 3-D underwater environments are used to hunt n targets. The whole workflow is as follows: (1) After any AUV finds the target, the system will assign tasks according to the distance between all AUVs and the target; (2) the AUV that discovers the target is defined as the leader, and the remaining AUVs for the same task are defined as followers. Leaders and followers are organized in a leader–follower mode and keep the formation to track the target; and (3) when the AUV formation is close to the target, the hunting point is determined according to the angle matching method. AUVs reach the hunting point to round up the target. The entire workflow is shown in Figure 2.

Hunting task flow chart.
To complete multi-AUV collaborative target hunting in a 3-D underwater environments, some key issues need to be addressed, including task assignment, leader–follower formation, and target capture. The specific algorithms of these three parts are described below.
Task assignment
When the target is discovered, which AUVs participate in the hunting is determined by the task assignment algorithm. The algorithm assigns tasks according to the distance between the AUV and the target to form a hunting team. In this article, it is assumed that one target requires six AUVs to be hunted in a 3-D underwater environments. Assume that the position of the ith target is


where
Formation tracking
After the task assignment is completed, the AUVs that are assigned the same task will be teamed to track the target. The AUV that discovers the target as the leader, and the remaining AUVs in the hunting team as the follower. Firstly, a virtual AUV is designed according to the speed and position of the leader AUV. Then, the backstep control strategy is introduced to design the formation control rate for the AUV. Finally, the virtual AUV is tracked by the follower AUV to achieve the expected formation effect. The navigation trajectory of the virtual AUV in the inertial frame system is

The structural block diagram of the control system is shown in Figure 3.

Basic structure block diagram of kinematic formation control system.
In the kinematic formation control system of Figure 3, the virtual AUV speed information

where k, kz , kψ are positive constant coefficients.
Target capture
After the multi-AUV formation is close to the target, it will form an encirclement as soon as possible to achieve the capture of the target. When the target capture is started, the position of AUV in the formation is
Step 1
Set the polar coordinates
Step 2
Calculate the coordinates
Step 3
Generate the hunting points for all AUVs in the formation. The hunting points are four points evenly distributed on a circle with
Step 4
The AUV reaches the hunting point along the shortest path. Here is a simple and effective angle strategy. AUV chooses the hunting point according to the principle that
Remark
When the target is successfully hunting, the positions of AUVs are shown in Figure 4. Since the positions of AUV R 1 and R 6 are directly above and directly below the target, the angle matching algorithm is only needed to determine the positions of the remaining four hunting points in the same plane.

Positions of the AUVs when successfully hunting the target. AUV: autonomous underwater vehicle.
Simulation research
To test the feasibility and effectiveness of the proposed algorithm, a simulation experiment is given based on the MATLAB platform. To more clearly reflect the process of target hunting, the simulation is divided into two parts: formation and target hunting.
Formation control simulation
7AUV linear navigation formation control simulation
In this section, the 7AUV linear navigation formation control simulation is performed. The navigation trajectory of the leader AUV is set to be linear:
7AUV linear navigation formation parameters.

AUV: autonomous underwater vehicle.
The kinematic control parameters are set to be
The kinematics formation control law of follower AUVs is obtained by the backstep formation control method. The formation process of 7AUV is shown in Figure 5. AUV
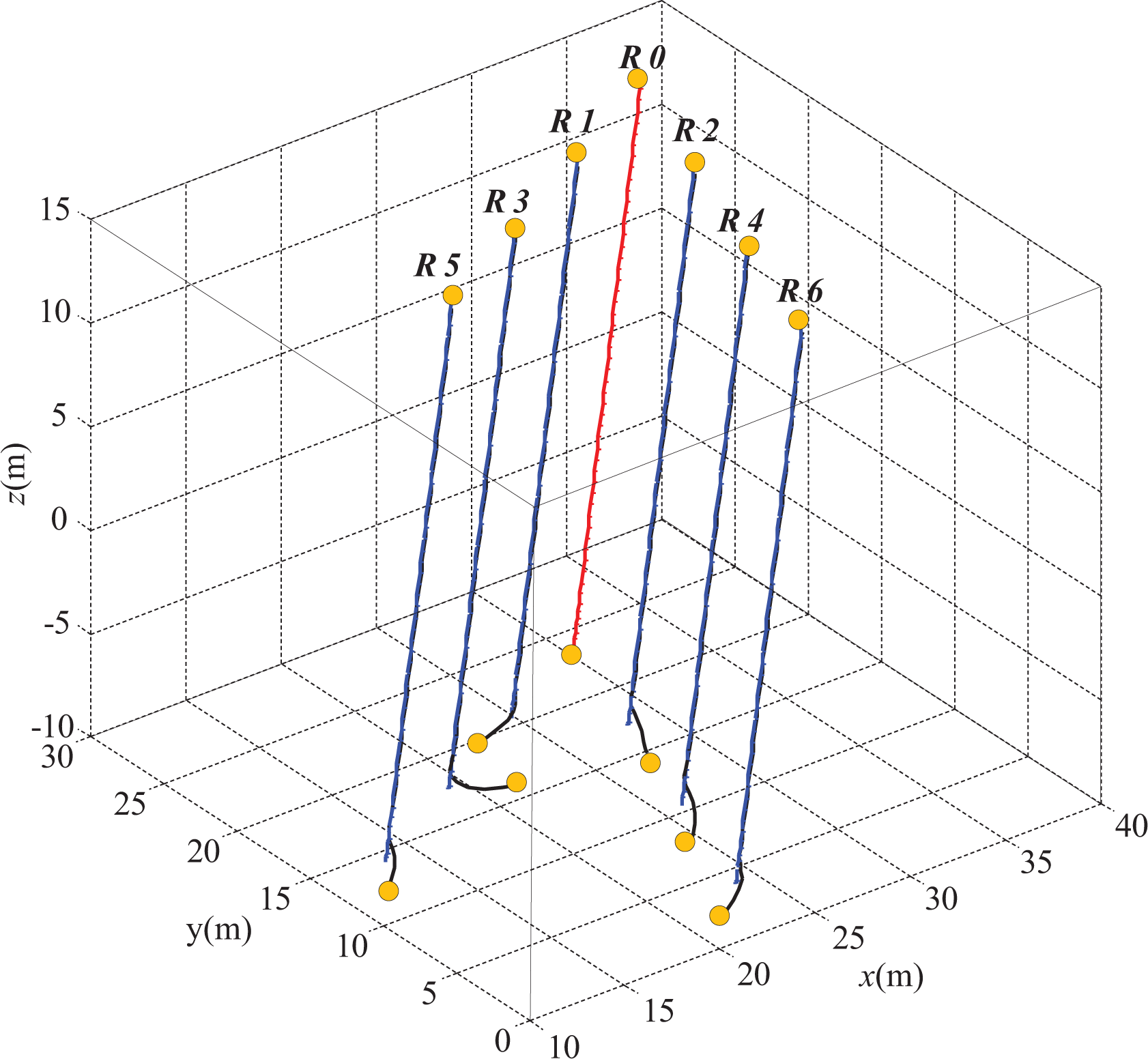
7AUV linear formation control. AUV: autonomous underwater vehicle.
7AUV spiral navigation formation control simulation
In the simulation of spiral navigation formation control, the position information of the leader AUV is first given. Set the navigation path of the leader AUV R
0 to a spiral:
7AUV spiral navigation formation parameters.

AUV: autonomous underwater vehicle.
The kinematic control parameters are set to be

7AUV spiral formation control. AUV: autonomous underwater vehicle.
Target hunting simulation
In this section, the entire target hunting process is simulated. To simplify the implementation, the following assumptions are made in this study: (1) the AUV and the target are assumed to have no shape at the particle point, and the direction of their motion can be changed without any delay; (2) the target has certain intelligence and can avoid the capture of AUV; (3) the speed of the AUV is faster than the target; and (4) xix AUVs required to round up a target.
Remark
The shape of the AUV is an important factor that must be considered in actual control. To solve this problem, size of obstacles are appropriately increased in the simulation.
Single target hunting
First, simulate a situation where only one target needs to be hunting. At the beginning of the hunting, the distribution of the seven AUVs and the target position is shown in Figure 7(a). Suppose that R1 finds the target T at this time. The capture mission begins, the task is assigned first. Because R7 is furthest away from the target, it is not assigned a task. The hunting mission is completed by

Single target hunting simulation: (a) initial position, (b) task assignment, (c) formation tracking, and (d) complete hunt.
Multiple target hunting
In the actual hunting mission, often more than one target exists. The simulation of multiple targets hunting is shown in Figure 8. The 10 AUVs in the simulation need to capture two targets. As shown in Figure 8(a), the distribution of AUVs and targets is given. When AUV R1 and R4 find target T1 and T2, respectively, the hunting task is assigned. As the number of AUVs does not meet the requirements for simultaneous hunting of two targets. Therefore, only through task assignment, one target can be successfully hunted and then another target can be hunted. According to the task assignment principle, AUV R3, R4, R7, R8, R9, and
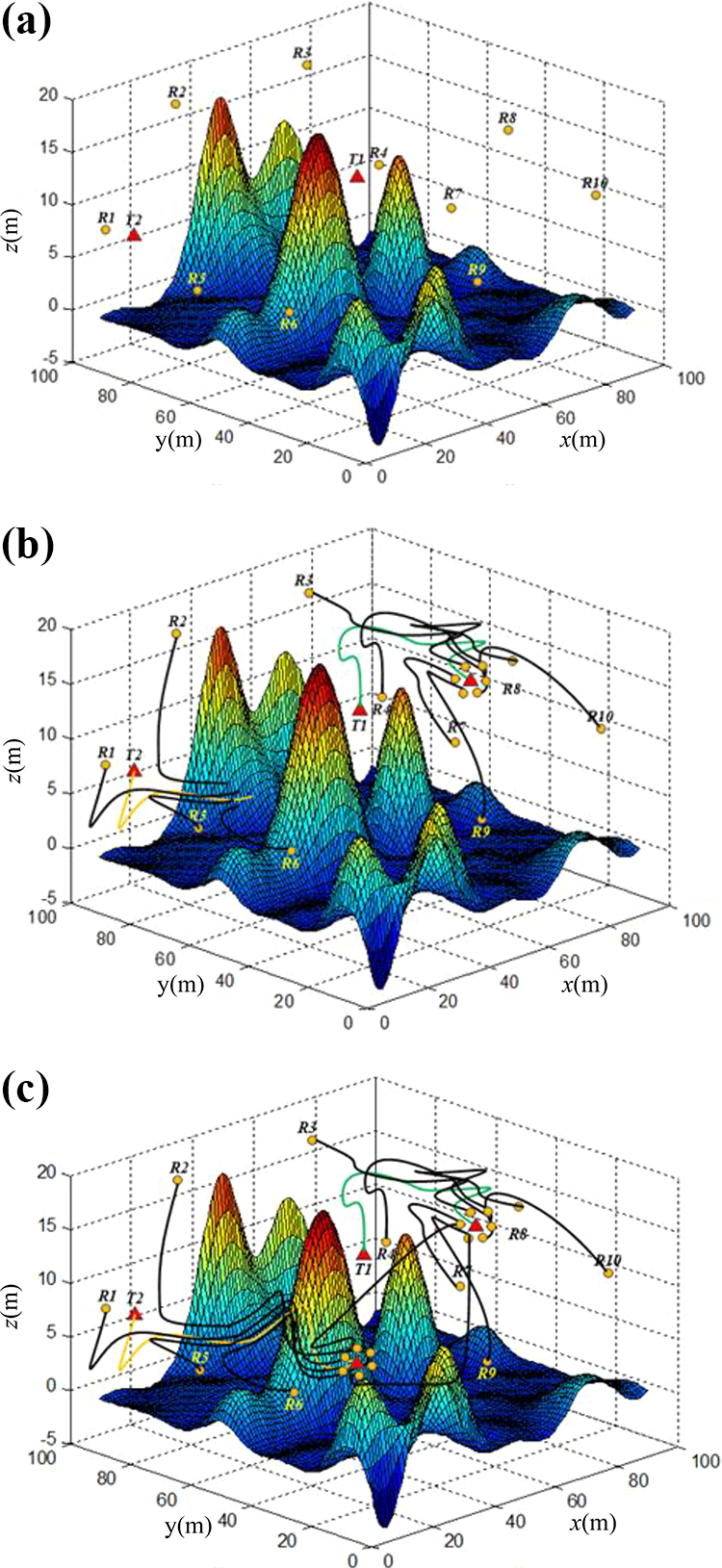
Multiple target hunting simulation: (a) initial position, (b) the first target is hunted, (c) the second target is hunted.
Discussion
The results of the simulation experiments in the “Formation control simulation” and “Target hunting simulation” sections show that the proposed approach can satisfy the cooperative hunting task by multiple AUVs under 3-D underwater environments. The effects of the main design parameters on the control performances are discussed in this section. We select main design parameters k and
To analyze the influence of parameters k and

Error curves for different k values.
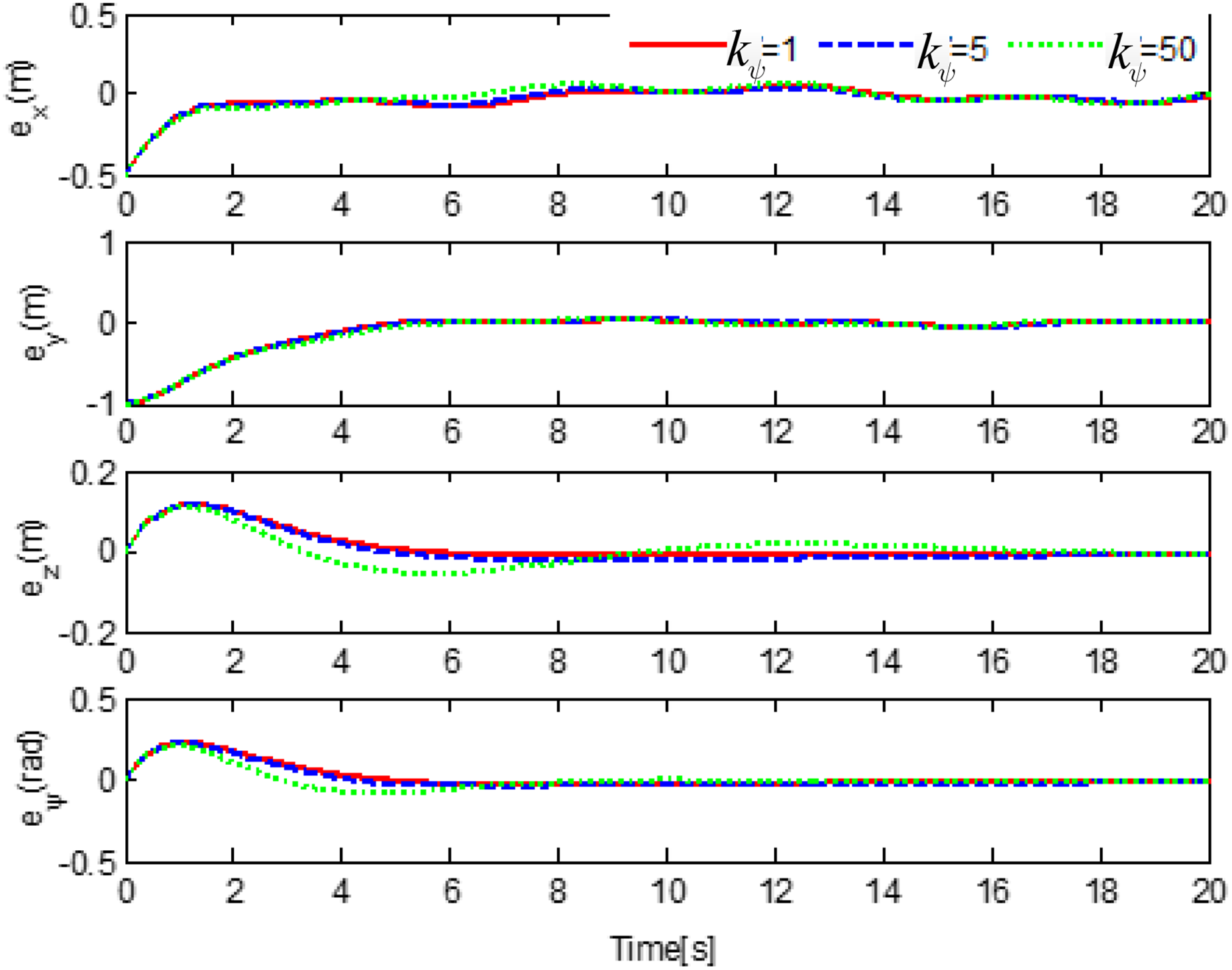
Error curves for different
It can be seen from the simulation comparison results that the hunting performance of the AUV is improved by selecting larger parameters k and
The results in Figures 9 and 10 show that the proposed approach is not very sensitive to the variations of the model parameters. (The difference between the error curves of different values is small.) The parameters can be chosen in a very wide range. Therefore, different values of main design parameters have little influence on the control performances.
Comparison of different algorithms
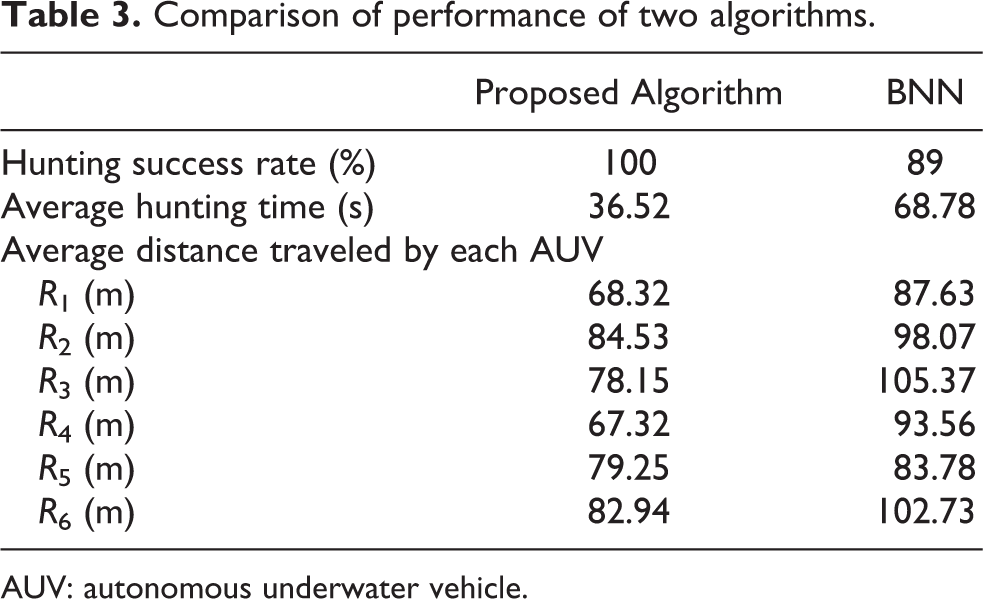
The simulation results of the first two sections show that the algorithm mentioned in this article can complete the multi-AUV target hunting in the 3-D unknown environments. The performance of the algorithm is discussed in this section. To verify the success rate of the proposed algorithm, it is compared with the BNN algorithm. The BNN algorithm sets the target as an external excitation signal and directs it to the AUV to the target through the transmission of the neural network. At the same time, the obstacle is set as an external suppression signal, and the AUV is partially rejected to avoid collision with obstacles. 33 Assume that in the 3-D environments of 100 × 100 ×60 m3, six AUVs hunt one target. Each time the position of the AUVs and the target are randomly distributed, 100 simulations are passed. The comparison results of the two algorithms are presented in Table 3. Table 3 lists the hunting success rates of the two algorithms, the average distance traveled by each AUV, and the average hunting time.
Comparison of performance of two algorithms.
AUV: autonomous underwater vehicle.
It can be seen from the table that the success rate of the proposed algorithm is higher than the success rate of the BNN algorithm, the hunting time is short, and the average distance of each AUV navigation is shorter. Analyze the reason: The BNN algorithm was used to plan the hunting path, each AUV moves toward the direction with the largest activity value of the neuron, which is easy to cause conflict, resulting in an increase in navigation distance and a decrease in hunting efficiency. In the proposed algorithm, multi-AUV do not cause conflicts because the system is in formation while hunting the target. In the BNN algorithm, AUVs do not reach the hunting point at the same time, which easily causes the target to escape. In the proposed algorithm, the system is formed, and the all AUVs can reach the hunting points at the same time to avoid the escape of the target. The BNN algorithm needs to calculate the activity value of each neuron for each iteration, and the calculation amount is large, resulting in slow hunting speed.
Conclusion
This article studies the multi-AUV collaborative target hunting in the 3-D underwater environments and proposes a target hunting method based on leader–follower formation. The mentioned algorithm improves the efficiency of hunting. The hunting of single or multiple targets under water is achieved through three stages: task assignment, formation tracking, and target capture. With the introduction of leader–follower formation, all AUVs arrive at the hunting points at the same time, which shortens the hunting time and avoids the target escaping. Compared with the BNN algorithm, the proposed algorithm not only has better performance in hunting efficiency and hunting time, but also improves the success rate of hunting. Although the algorithm mentioned herein has the above advantages, there are still some deficiencies. Future work will further improve existing algorithms to provide better performance. At the same time, the environment and AUV models will be further explored to enable the algorithm to have a wider range of applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by the National Natural Science Foundation of China (61773177), the Natural Science Foundation of Jiangsu Province (BK20171270, BK20141253), the China Postdoctoral Science Foundation (2017M621587), the Jiangsu Planned Projects for Postdoctoral Research Funds (1701076B).