
Abstract
As an autonomous vehicle that moves on the space orbit, a space robot needs to be carefully treated on the motion planning and control method. In this article, the optimal impact and postimpact motion control of a flexible dual-arm space robot capturing a spinning object are considered. Firstly, the dynamic model of the robot systems is built by using Lagrangian formulation. The flexible links are modeled as Euler–Bernoulli beams of two bending modes. Through simulating the system’s postimpact dynamics response, the initial conditions are obtained from the impact model. Next, the initial velocities of base and joint are adjusted to minimize the velocity of the base after the capture according to generalized momentum conservation. After the capture, a proportional–derivative controller is designed to keep the robot system’s stabilization. The simulation results show that joint angles of base and manipulators reach stable state quickly, and motions of the space robots also induce vibrating motions of the flexible manipulators.
Introduction
Astronaut extravehicular activities can fulfill capturing operation on orbit but is expensive and risky. Developing space robot with manipulators to capture object is worth of research. Impact motion control of the space robot becomes an important problem because the capture operation brings impact, especially when flexible links are used for cutting down the weight of the robot.
Generally, the capturing operation can be divided into three phases of preimpact, impact, and postimpact. 1 The preimpact phase refers to the approach process. In the impact phase, the robot contact with the object. Because the relative speed between the robot and the object can hardly be zero, the impact is inevitable, even a man. 2 On the other hand, for getting good control precision, the main link of the space robot should be considered as a flexible link because it is needed to be light and long.
Now, there are many achievements on the research of the sliding mode control of a space robot with one flexible link, 3 adaptive controller based on Kalman filter for space manipulator with flexible joint, 4 the dynamic modeling and control of space robot with a single flexible arm, 5 and a modeling scheme has been described for dynamics of space robots in collision, 6 but there are still few of the research studies for space robot with multi flexible arms.
Till now, research on the impact problem is mainly done with ground robots 7 –9 and is mainly considered the force impact force at the contact point. The impact problem of a free-floating space robot has also been studied. 6 The article developed a notation named the extended-inverse inertia tensor and a comprehensive framework for the impact dynamics that considered the impact force on the end of the manipulator. For a free-floating space robot, the dynamics of the base and the manipulator are coupled. Thus, the impact dynamic problem becomes more complicated. There is currently very little available in the literature on the flexible dual-arm space robot. Wu et al. 10 studied the motion simulations of a flexible dual-arm space manipulator. Chapnik et al. 11 researched the modeling of impact on a single flexible link and the problem is formulated in the study by Yoshida et al. 6 However, the article did not make the simulation on the post-capture dynamics. Cyril et al. 12 have studied the effect of impacts for a flexible-link free-floating space robot. Another kind of solution was proposed in the study by Walker and Kim, 13 namely to tumble the object by using a “space leech” that can be attached to the object. However, the article did not give the method of how to attach the space leech to the object. Wee and Walker 14 proposed a configuration-dependent scalar function for minimizing the force impulse. By using the gradient project technique, an optimal trajectory with minimal force impulse can be planned in the configuration space. However, the gradient project approach may fall into a local minimum. In the future, an intelligent method for motion planning is worth to be studied by using some new proposed methods. 15 –22
The object of the article is to study the optimal impact and postimpact motion control of a flexible dual-arm space robot capturing a spinning object with specific velocity. The article is organized as follows: the Lagrangian dynamic model of the space robot is derived in the second section. Besides, the initial conditions are deduced from the impact model for postimpact dynamics of the robot. The optimal impact design is included in the third section. In the fourth section, a motion control scheme is proposed. Some simulation results are presented in the fifth section, and the conclusions are reported in the last section.
Dynamic model
Dynamic modeling of the flexible dual-arm space robot
In this section, the Lagrangian dynamic models of the robot system are built. Because the capture procedure has relatively short trajectory and duration, the actors of orbital mechanics can be neglected to simplify the dynamic model. Figure 1 shows the scheme of the flexible dual-arm space robot. The robot has a cylinder base and two same manipulators of two links. Those parts are briefly named as link 1(the base shaped in cylinder) to link 5, respectively, where links 3 and 5 are flexible links. Let l
1 be the radius of the base and

where n is the number of mode of each flexible link.

Flexible dual-arm space robot coordinate system.
The clamped-free beam mode shape functions are used for dynamic modeling. The system’s generalized coordinate vector should be selected as
By calculating the robot’s kinetic energy, flexible potential energy, and virtual work, the dynamic equation can be derived by Lagrangian formulation as

where M refers to a symmetric and positive definite matrix of the inertia mass, C refers to the vector of Coriolis and centrifugal forces, u refers to the vector of generalized driving forces,
Define the generalized driving force vector as
Initial conditions of the dynamic process at the postimpact phase
An assumption is utilized for the impact model. In the impact instant, the generalized velocities change substantially, while the generalized coordinates can hardly be changed in a short time. 10 When the robot captures an object, force and torque relations occur between the object and the robot. As shown in Figure 2, vector fI refers to the resultant of forces and torques that act on the robot. In the impact instant, the dynamic equations of the robot can be obtained by considering the impact force fI into equation (2) as

and the Lagrangian dynamic equations of the captured object can be built as

where

The flexible dual-arm space robot with a captured object.
Solving the impact force fI from equation (4) and then substitute it into equation (3), we have

where
Then equation (5) is integrated over the period of impact τ

Next, the angular momentum’s change of the robot in the impact instant is examined. As usual, the time interval of the impact is assumed infinitesimal, namely,

where f and i are used as subscript to mean after and before the impact, respectively.
Equation (7) is fit for all kinds of collisions, not only plastic impact but also perfectly elastic impact. Assuming that the robot capturing the object successfully, the plastic impact should be considered in this article. Namely, the robot and the object have immediately the equal velocity at the contact point after the impact. Therefore, we have

Solving the generalized velocities of the object from equation (8) as

Substituting equation (9) into equation (7), we get

where
We can use equation (10) to calculate the initial velocity that effects system’s dynamical process at the postimpact phase according to the initial velocities of the object
Dynamic model at the postimpact phase
If the object is captured successfully, the end effectors of the robot have equal velocity with the object at the contact point. The robot and the captured object can be treated as one system. Therefore, the postimpact dynamic model should combine the robot and the object. Namely, we have the following equation

Differentiating equation (11), it is obtained that

Substituting equation (12) into equation (4), we get

Then combining equations (13) and (3), we have

where
M′ refers to the symmetric and positive definite of system’s generalized mass matrix. Vector C′ refers to the Coriolis, centrifugal terms. Equation (14) is the dynamic model at the postimpact phase of the system which includes the robot and the object.
Optimal impact configuration design
It is assumed that all the inertia and dynamic properties of the robot system are known. The external force on the robot system before the impact is zero because they are moving on the outer space. During the capture, the velocity of the base will change inevitably. Therefore, it is necessary to adjust the initial velocities of base and joint according to generalized momentum conservation to minimize the velocity of the base after capture. In this section, we design the optimal impact configuration by transforming the momentum from the base to the manipulators
Evaluation function is

where
Postimpact control
In this section, a control system is proposed to keep the whole system’s stabilization at the postimpact phase. The computed torque method is utilized. The method linearizes the equations of motion via feedback. Thus, the control strategy used here is a kind of feedback linearization control.
Currently, active control has not yet been used in an actual situation for elastic coordinates. In this section, the elastic effects are considered in the mathematical model. The amplitudes of elastic effect are assumed to be read from the sensor by means of an estimator. In fact, the elastic deformations in this model are just handled as known disturbances but not are explicitly controlled. At the same time, the object captured can be treated as a deterministic disturbance because inertia and dynamic properties of the object are known. For convenient simulation and control, equation (14) can be rewritten in the following partition form

In equation (16), a means related to the coordinate

where
Introducing the following control torque

where diagonal matrices
By substituting equation (18) into equation (17), we have

According to equation (18), some sensors are needed for feedback value of pa
and
Simulation
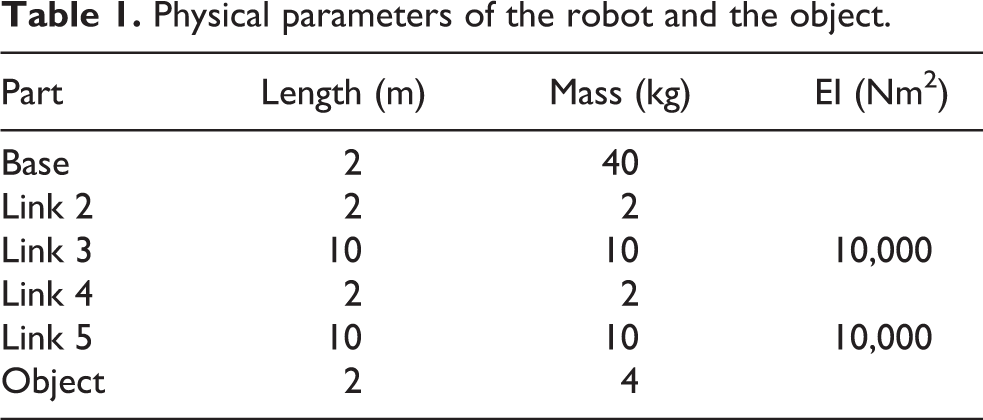
An optimal impact configuration simulation of the space robot system preimpact is firstly carried out. The physical parameters of the robot and the object are given in Table 1. The initial conditions of the postimpact phase are listed in Table 2. Two modes are used to model the flexibility of each flexible links, namely, links 3 and 5. The problem is solved in the MATLAB programming environment, and the function fmincon which solves equality-constrained example is used. According to the initial conditions of the space robot and the object, the initial velocity of base is adjusted on generalized momentum conservation to minimize the velocity of the base after the capture. The results of adjusted initial velocities are given as
Physical parameters of the robot and the object.
Initial conditions of the robot and the object.

Next, a simulation for controlling the degrees of the base and the joint angles of the manipulators is carried out by using the feedback linearization of equation (18). The initial velocities of the whole system at the postimpact phase are evaluated according to equations (9) and (10). As shown in Figure 3, joint angles of the base and the manipulators all quickly reach steady state, and the desired final angles are equal to the initial angles. Figure 4 shows the displacement of the links 3 and 5. It is reasonable because of the flexibility vibration. The displacement is not damped out because the structural damping is not incorporation in the model.

Joint angles of the space robot system after control is carried out. (a) curve of sita 1, (b) curve of sita 2, (c) curve of sita 3, (d) curve of sita 4, and (e) curve of sita 5.

Flexible displacements of the space robot system after control is carried out. (a) displament of link 3, (b) displament of link 5.
Conclusion
In this article, the Lagrangian dynamic equations of a flexible dual-arm space robot are developed. And the impact dynamics model of robot is also derived with Lagrangian formulations. A method is proposed to decide the initial conditions for system’s dynamic simulation at the postimpact phase.
Firstly, the initial velocities of base and the manipulators are adjusted to minimize the velocity of the base after the capture according to generalized momentum conservation through Lagrangian multiplier method by using MATLAB software. Secondly, a control algorithm is designed to maintain stabilization of the whole system after capturing a spinning object. As shown in simulation results, the joint angles of both base and manipulators quickly reached steady state. Finally, the case of successfully captured, namely, fully plastic impact, is considered in this article.
Currently, the elastic deformations of flexible links are described by using the assumed mode method. A flexible link has theoretically infinity many modes. However, in practice, taking only the first n finite modes to calculate the approximate solution. The n value depends on the accuracy requirement. The more n, the higher the accuracy, but the greater the amount of calculation. In the future, the proposed method can be verified with more precise model or even the physical experiment. Besides, other kind of impact, such as fully elastic impact, should be analyzed and the way of structure vibration control of the flexible link should be discussed in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the financial support for the research, authorship, and/or publication of this article: This work was supported in part by the NSFC Project Numbers 61773416, 61873291, and 61602539.