
Abstract
This article presents a novel model-based sensorless collision detection scheme for human–robot interaction. In order to recognize external impacts exerted on the manipulator with sensitivity and robustness without additional exteroceptive sensors, the method based on torque residual, which is the difference between nominal and actual torque, is adopted using only motor-side information. In contrast to classic dynamics identification procedure which requires complicated symbolic derivation, a sequential dynamics identification was proposed by decomposing robot dynamics into gravity and friction item, which is simple in symbolic expression and easy to identify with least squares method, and the remaining structure-complex torque effect. Subsequently, the remaining torque effect was reformulated to overcome the structural complexity of original expression and experimentally recovered using a machine learning approach named Lasso while keeping the involving candidates number reduced to a certain degree. Moreover, a state-dependent dynamic threshold was developed to handle the abnormal peaks in residual due to model uncertainties. The effectiveness of the proposed method was experimentally validated on a conventional industrial manipulator, which illustrates the feasibility and simplicity of the collision detection method.
Keywords
Introduction
Robot collaborating with humans in both domestic and industrial area is increasingly becoming a research focus, and much effort has been devoted to realize human–robot collaboration in which both counterparts share the same workspace to accomplish a goal via different interaction modes. 1,2 Compared to conventional robots strictly confined within safe fence to avoid any possibility of physical interaction when robot is performing a predefined task, collaborative robots, also known as co-bots, have been regarded as a new generation of robots with the feasibility to complete the complementary task with close involvement of operator or direct physical contact with human for cooperation through high-level autonomy. The arising concern of safety is a critical challenge when a close distance between humans and robotic apparatus is typically demanded for collaboration scenario since the chance of unexpected collision significantly increases due to one’s frequent intervention into the robot’s operation space. 3 –5 To address the issues of safety, several related technical standards have been proposed to provide guidance for collaborative robots in order to minimize the potential injury risks caused by collisions between the robot and human operator or its surrounding environment. 6 –8
Generally speaking, effective schemes dealing with collision can be divided into pre-collision and post-collision strategies based on when the active actions are given with respect to time of impact. On the one hand, the former strategies can usually achieve desirable collision-free performance by actively providing appropriate collision avoidance path using additional sensors to perceive unstructured surrounding environment, which is sometimes sophisticated and probably computational heavy. 9 –12 For example, human–robot coexistence can be guaranteed by introducing preventive approaches aiming at monitoring the operator’s distance to robot body with stereo vision 10 and proximity sensors. 12 On the other hand, post-collision strategies give a reactive response to the impact without the requirements of real-time locating operator’s position and a complex path planning algorithm to avoid obstacles. 2,13 –18 Meanwhile, the algorithmic simplicity of post-collision scheme is always at the cost of the potential collision impact due to its intrinsic property that collision could not be detected until the impact between the robot and its surroundings occurs, which highlights the significance of how to accurately diagnose the abnormal signals resulting from the unexpected collision. However, the post-collision scheme, which succeeds in minimizing the unintended collision threats, is attractive to reduce the costs of external sensing and potential failures due to the integration of additional perceptive components, making the approach preferable for cost-sensitive industrial applications. 2,19,20 In human–robot collaboration context, a comprehensive risk assessment is particularly required for robotic system adopting the post-collision strategy to embed safety scheme such as collision detection and reaction into the control system. Crash testing in robotics by Haddadin et al. experimentally manifested how the factors like robot mass and velocity affect the injury severity index from both biomechanics and forensics aspects through human–robot impact voluntary testing. 4,21 It was demonstrated that a lightweight manipulator with compliant actuation is less likely to cause fatal injuries. 22 –25 Lightweight designed robots are inherently suitable for close human–robot interaction with the desirable features of low inertia and reduced weight which allows driving torque output to decrease. Thus, the injury caused by collision is also considerably minimized in contrast to conventional heavy and stiff manipulators. 22,23 In terms of compliant actuation, flexibility is introduced into the actuator, 25 even with adjustable impedance property. 26 Apart from the human-friendly design with compliant and lightweight property which does not necessarily ensure the operator’s safety, control for safe physical interaction allows the realization of collision handling with the primary motivation of detecting the impact-deduced signal as fast as possible before the robot has imposed excessive force on the operator. A simple but feasible approach is to monitor non-model-based signals such as the instantaneous transients in current or the variation of position, which to some extent characterizes the system fault in control system caused by external impact. 27 These approaches suffered from the drawbacks of low sensitivity and system dependence as moderate impact may produce too sight influence to observe and the detection threshold is heavily dependent on control performance. Other accessible methods principally rely on the model-based signal, which requires the complex nonlinear system dynamic description and accurate dynamic parameters provided by robot manufactures or experimentally calibrated. 13,19,20,28 A straightforward idea is to compare the actual torques with the estimated torques, which is easily calculated using the inverse dynamics providing real-time robot motion information, to generate the residual signal as the difference of these two torques. Thus, the residual signal is attributed to a collision under the assumption of precise dynamic parameters and modeling. This method has been refined by employing an observer of the generalized momentum to avoid double numerical differentiation of position to calculate the joint acceleration, which inherently reduces the measurement noise and improves the accuracy of the residual signal. 13,15 In a similar perspective, several disturbance observers were also discussed to estimate the exogenous disturbance imposed by the environment. 29 –31 In summary, the effectiveness of these model-based methods critically relies on the accuracy of relevant dynamic parameters which always keep confidential and unavailable to users and need parametric calibration by a meticulous identification experiment, since the parametric errors structurally affect the residual signal as external disturbances. The dynamic parameter identification has been extensively researched to explore the issues including symbolic calculation of base parameter, excitation trajectory design, physical feasibility, and estimation method, which requires much effort and attention to derive the sophisticated symbolic expression and enhance the accuracy with a well-conditioned excitation trajectories. 32 –35 One practical approach which combines machine learning method with model identification procedure enables the simplification of symbolic computation and a satisfying prediction performance. 36 –39 For instance, a data-driven machine learning approach was presented in literature 39 to learn the dynamics of a planar two-link robot using a regressor selection technique while this method is limited to a class of planar robot whose fiction and gravity effect has little influence on the overall dynamics. Regardless of the parameter identification accuracy, the collision is eventually judged with the comparison of the residual signal and a certain threshold. A primary concern in designing threshold is how to achieve a trade-off between prevention of false alarm and detection sensitivity at the same time. It is worthwhile to tune the collision detection threshold rather than select a static threshold to achieve better detection performance. 21,17 The generation of a dynamic threshold was elaborated in literature 17 through an adaptive residual evaluation to tackle the uncertainties in robot dynamic parameters for a two-link robot, while the online computational burden would significantly increase for robot with more degrees of freedom (DOFs), and estimation errors would accumulate as a recursive scheme was adopted in the threshold formulation.
In this article, a novel sensorless collision detection algorithm for human–robot collaboration scenario is presented on a conventional industrial robot without prior knowledge of dynamic parameters. Based on the model-based collision handing framework, the unknown dynamic parameters of the manipulator, which is indispensable to reconstruct the inverse dynamics and consequently generate the residual signal, are estimated with a sequential identification procedure. The first step of the identification experiment is to predict the gravity and friction accounting for the major components of torque when robot is running in collaboration mode. Subsequently, a machine learning approach named Lasso is introduced to identify the remaining torque, avoiding the necessity of symbolic derivation of the sophisticated expression. Furthermore, by synthesizing state-dependent dynamic threshold, the residual signal is evaluated in case of model uncertainties.
The rest of this article is organized as follows. Firstly, the dynamics modeling and model-based collision detection scheme are illustrated. Then, a fast dynamics identification is described with a sequential identification method. The gravity and friction effects are estimated with a classic method, and details are provided on the formulation of the remaining torque prediction using a machine learning approach. The residual signal is analyzed with a dynamic threshold to detect external disturbances. Subsequently, the proposed collision detection scheme is experimentally validated on a robot performing a predefined task. Finally, collusions and future directions are provided.
Model-based collision detection
Robot dynamic model
For n-DOFs serial manipulator, let


where

Note that a completely rigid joint is always taken into consideration for simplified analysis (

where
The symbolic dynamic model equation in equation (4) can be firstly derived using Lagrange equation or Newton–Euler method, which can be decomposed such that the dynamic model can be reformulated as a linear regression form. The dynamics equation can be written in linear expression with respect to its dynamic parameters as

where vector

where
Since the stacked regression matrix
Residual generation under model uncertainties
In human–robot collaboration scenario where humans are close to the robot to perform cooperative tasks by sharing workspace, safety is the fundamental issue to be considered such that effective safe regulations must be utilized to ensure human safety in case of unexpected collisions. To address the collision detection issues for safe pHRI, several model-based approaches have been proposed based on residual signal using the difference between nominal and actual values such as torque, energy, and generalized momentum.
2,13,15
These approaches have been devoted much attention to detect the unexpected physical collision between the manipulator and its environment, since only the proprioceptive sensors were used in the detection procedure. It is not only economical to keep the expenses low for external sensing, but also easy to implement by reducing the integration elements, leading to lower maintenance costs and potential failures. For this type of collision detection approach, a straightforward residual method can be computed as the difference between the estimated torque

where

where

However, the estimated torque value (8) contains modeling and measurement errors, and it yields

where
Proposed collision detection scheme
In order to formulate an effective model-based collision detection scheme without additional sensors, identification of dynamic parameter is the fundamental basis for the sensorless collision detection. A major difficulty of the classic dynamic parameter identification lies in the derivation of the symbolic expression of robot dynamics and regrouping the linear form, which requires much effort and attention even with the assistance of commercial software for symbolic computation. In contrast to traditional method, an alternative to handle model identification is machine learning approach. 36,37,39 This method offers a framework for automatically learning the complex dynamics without incorporating knowledge about the symbolic expression while still keeping a satisfactory performance for robot control and planning. In literature, 39 a fast modeling and identification of robot dynamics was proposed based on Lasso 40 and a simple example of a two-link direct-drive robot was demonstrated to show the effectiveness of this promising approach. Although this method can skip the analytical derivation and identify the candidate terms that act on robot dynamics by a regressor selection technique, the condition of this experiment is limited to a planar manipulator that has no gravity and friction effects, which is obviously not suitable for most robotic apparatus. In this section, an approach based on Lasso is presented to remedy the defect in 39 to realize dynamic modeling and identification for a generic articulated manipulator so as for further collision detection scheme.
Gravity identification
Robot dynamic model identification, which has been intensively researched, is absolutely complex compared to the gravity and friction identification. Here, we will first examine the problem of gravity identification and design a method for accurate identification. The identification of gravity is only position-dependent and the gravity item can be expressed in the following linear parameterized form

where
Then adding the resulting torques according to these two configurations yields

If

Hence, the contrition due to gravity in joint torque can be derived if the above motion assumptions are satisfied by moving the robot to a certain position from the opposite direction at a low velocity with a constant value so as to eliminate other torque effects. To estimate the gravity parameters, we extracted the gravity effect from joint torque by gathering data from 100 different robot configurations and applied least squares method on equation (11).
Friction identification
For electromechanical systems including robot, friction effect plays a significant role in system modeling and control, which is usually difficult to predict especially when robot changes its motion direction. Many researchers have proposed different friction models and identification methods for robot control and simulation. 41 –44 In this article, we only employ the basic Coulomb and viscous friction model due to its simple description which captures most characteristic of the friction phenomenon yet. Similar to the extraction of gravity effect from joint torque, the friction effect must be processed in order to identify the friction parameters. Suppose two robot motion states satisfy the condition in equation (12), then the difference of these according torques is

It is intuitive to design a sinusoidal motion for joint i in the form of

where
Remaining torque identification
Since the gravity and friction items have been identified, thus these two components can be removed from robot joint torque for the remaining complex, nonlinear components model learning. Here, the sum of inertial torque

It is reasonable to consider the elements in regressor

where

where

In the transformed expression (19), the regressor
In order to identify the dynamic parameter while reducing the feature dimension to a certain degree by shrinking some coefficient estimates toward zero, a regressor selection method named Lasso is a privilege to employ.
39
Lasso is a regression analysis method that incorporates the least squares method to minimize regression error and an
Observing N groups of data and utilizing the Lasso method, the parameter identification problem for

where
It is sufficient to predict that the vector
For classic robot dynamic parameter identification, it is essentially significant to design a well-conditioned excitation trajectory in order to reduce estimation error. 33 When it comes to machine learning method, it also requires a sufficiently large amount of data that can contain the necessary information for modeling as much as possible to improve estimation quality. However, designing a well-conditioned trajectory is not the focus of this article and a practical trajectory generation approach inspired by finite Fourier series trajectory 33 is briefly introduced here.
The basic form of the excitation trajectory for the
where
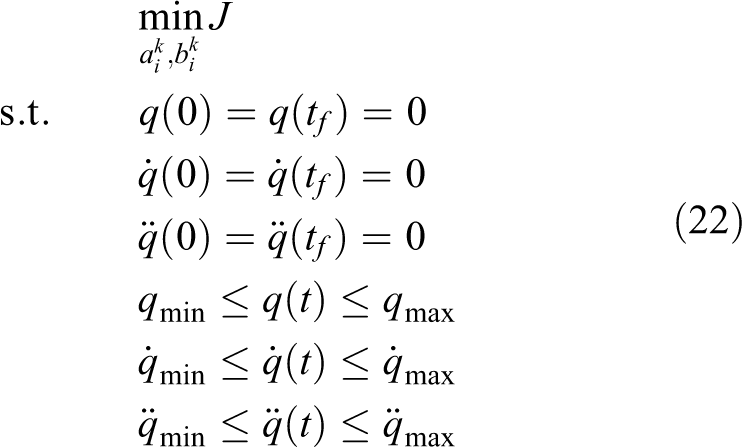
where J is an optimization objective to be determined afterwards;

where both
Residual threshold design
As the elaboration in previous section, the residual signal consists of two parts including the external torque effects indicating impacts and the unfavorable disturbances due to parametric uncertainties and model inaccuracies which corrupt the collision detection. It is observed that even under the free motion circumstance, the residual signal has the trajectory-dependent variation in which the peaks due to model uncertainties surprisingly larger than the peak produced by the collision, revealing a static threshold above the maximal residual amplitude is not suitable to obtain a good collision detection performance (see Figure 1). In order to overtake the inappropriate static threshold, the peak caused by collision may have to rise so excessively that collision may be critically harmful to some extent.

Residual signals for free motion (blue, solid line) and collision (red, dashed line) for joint 1.
A reliable and achievable alternative to distinguish the meaningful peaks caused by collision from false alarm peaks provoked by model uncertainties is to adopt a time-varying dynamic threshold. Instead of the method proposed in literature, 17 the residual signal is considered as moderate when there is no collision; otherwise, further model refinement and identification has to be implemented to modify the residual. Thus, for a relatively accurate model identification, the residual can be bounded with a dynamic threshold dependent on trajectory. The inner structure of the residual is not modeled in detail but deemed to be a black box. When there is no collision, the dynamic threshold for each joint holds

The threshold

The last item in

where

Experiment and validation
Experiment setup
The proposed collision detection scheme has been performed on Efort ER3A industrial robot in our lab (see Figure 2). The 6-DOF manipulator has a spherical wrist, 3 kg of payload capability, and maximal stretch of 0.63 m from the base. The link frames of the Efort ER3A robot are illustrated in Figure 3 and geometry information of the manipulator in modified Denavit and Hartenberg (MDH) representation is given in Table 1. The robot is powered with AC servo motors, which are connected with harmonic gears to increase the effective torque. The robot system uses an industrial computer equipped with 2G RAM and a Hilscher cifX bus communication card, running VxWorks RTOS to realize real-time control of the robot servo drivers. The communication card enables the EtherCAT communication between the servo drivers as the slave devices and the industrial computer as the master device, which allows sending motion or torque commands to control robot and receiving real-time robot’s information such as joint positions and currents at every 4 ms. Since the control architecture is open, the users can program the robot through a teach pendant or use the C++ language with a graphical user interface on a personal computer. Hence, with appropriate programming, the robot control system can implement motion control on both joint and Cartesian space and collect data from both proprioceptive sensors (e.g. motor position encoder and motor current sensor) and exteroceptive sensors (e.g. force/torque sensor, vision sensor). The overall overview of robotic control system is shown in Figure 4.

Experimental platform of Efort ER3A robot.
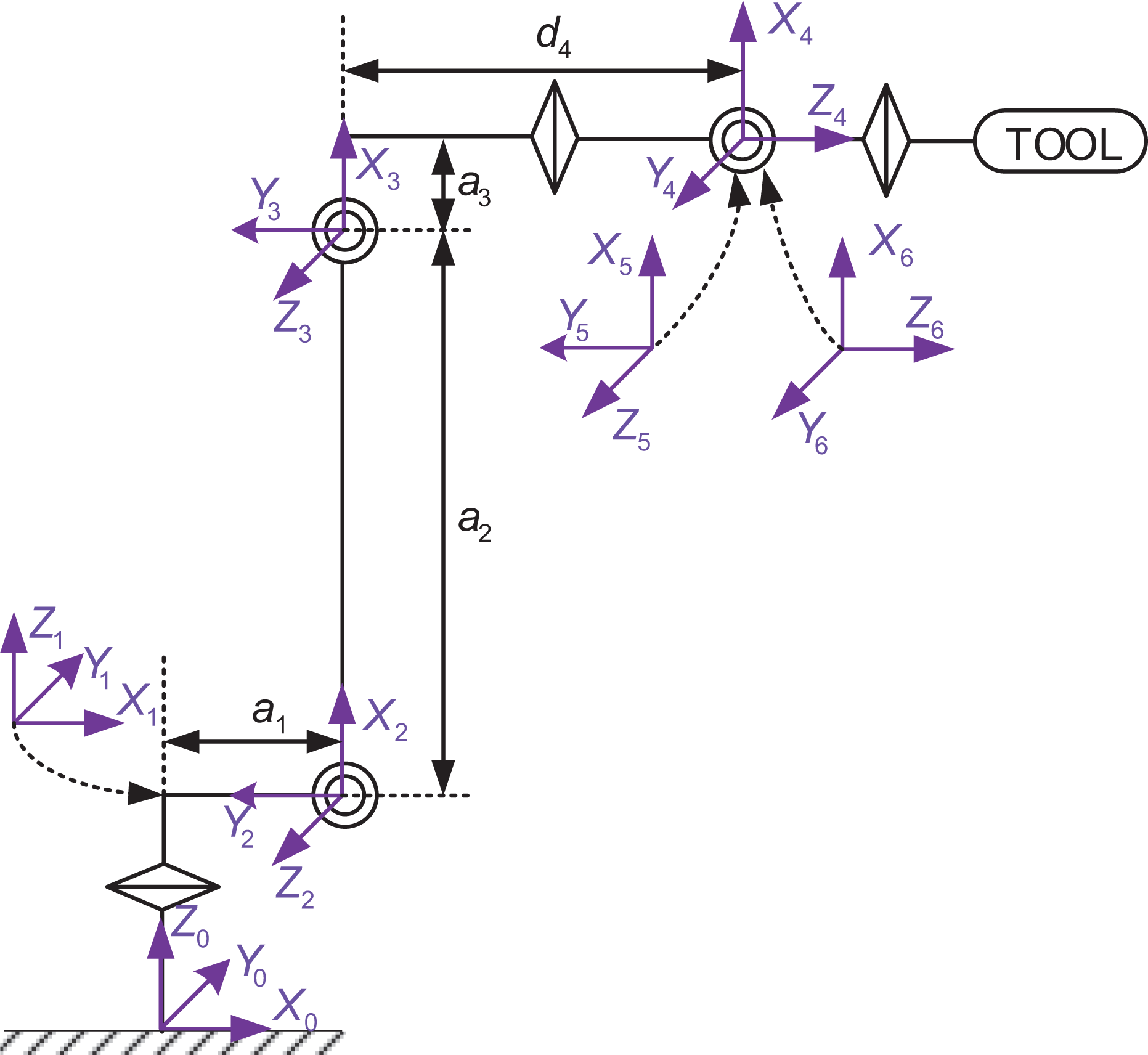
Link frames of Efort ER3A robot.
The MDH parameters of Efort ER3A.

MDH: modified Denavit and Hartenberg.
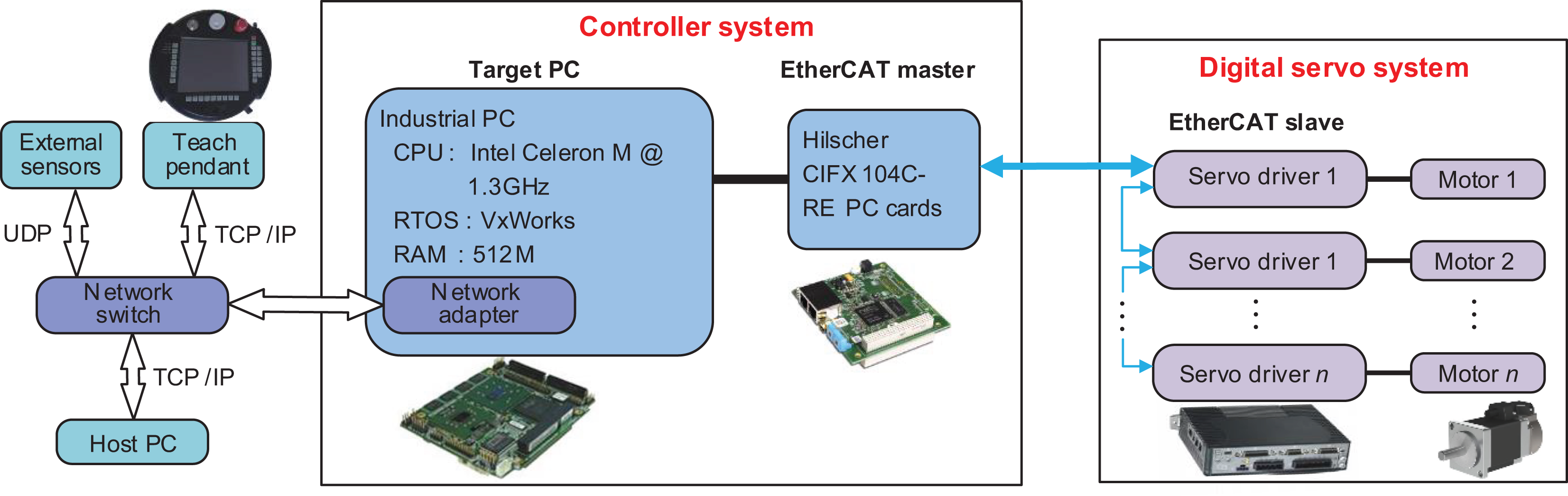
Control framework of Efort ER3A robot.
The robot is position-controlled with a well-tuned proportional-derivative control law embedded in the servo drivers and only the first three joints are activated for simplicity throughout the article. The input provided to the controller is typically reference position

where

with
Dynamics identification and residual threshold design
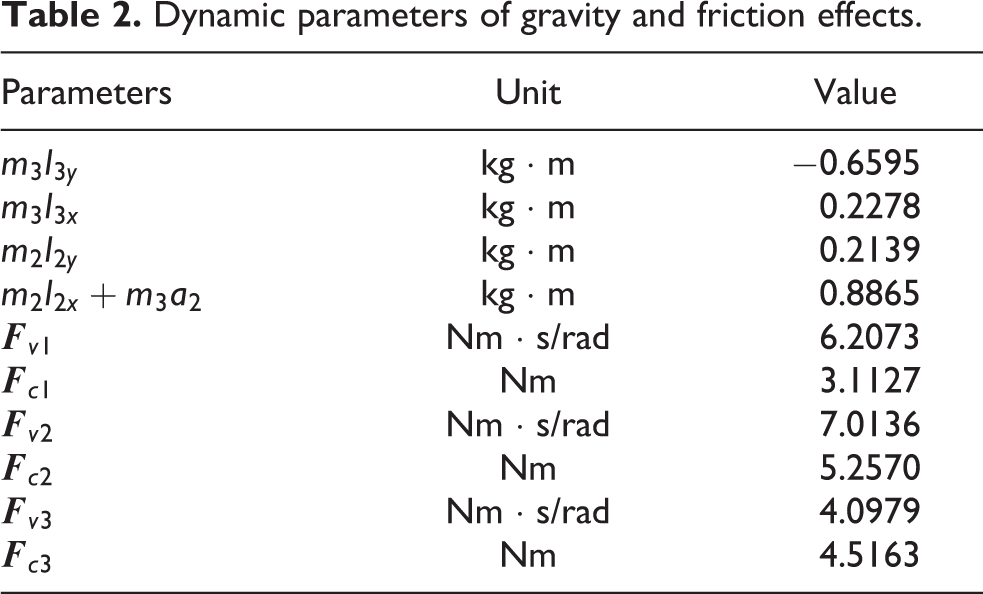
In the case of the Efort Ertext 3A robot, gravity effect only presents at the second and third joints and the base gravity parameters can be parameterized with four grouped expressions of mass and center mass. Based on the analysis in the gravity and friction identification, the identification procedure was conducted on the industrial robot sequentially. The corresponding parameters of the first three joints are summarized in Table 2.
Dynamic parameters of gravity and friction effects.
In our experiment of training trajectory generation, some basic parameters were designed with
Motion constraints for training trajectories.

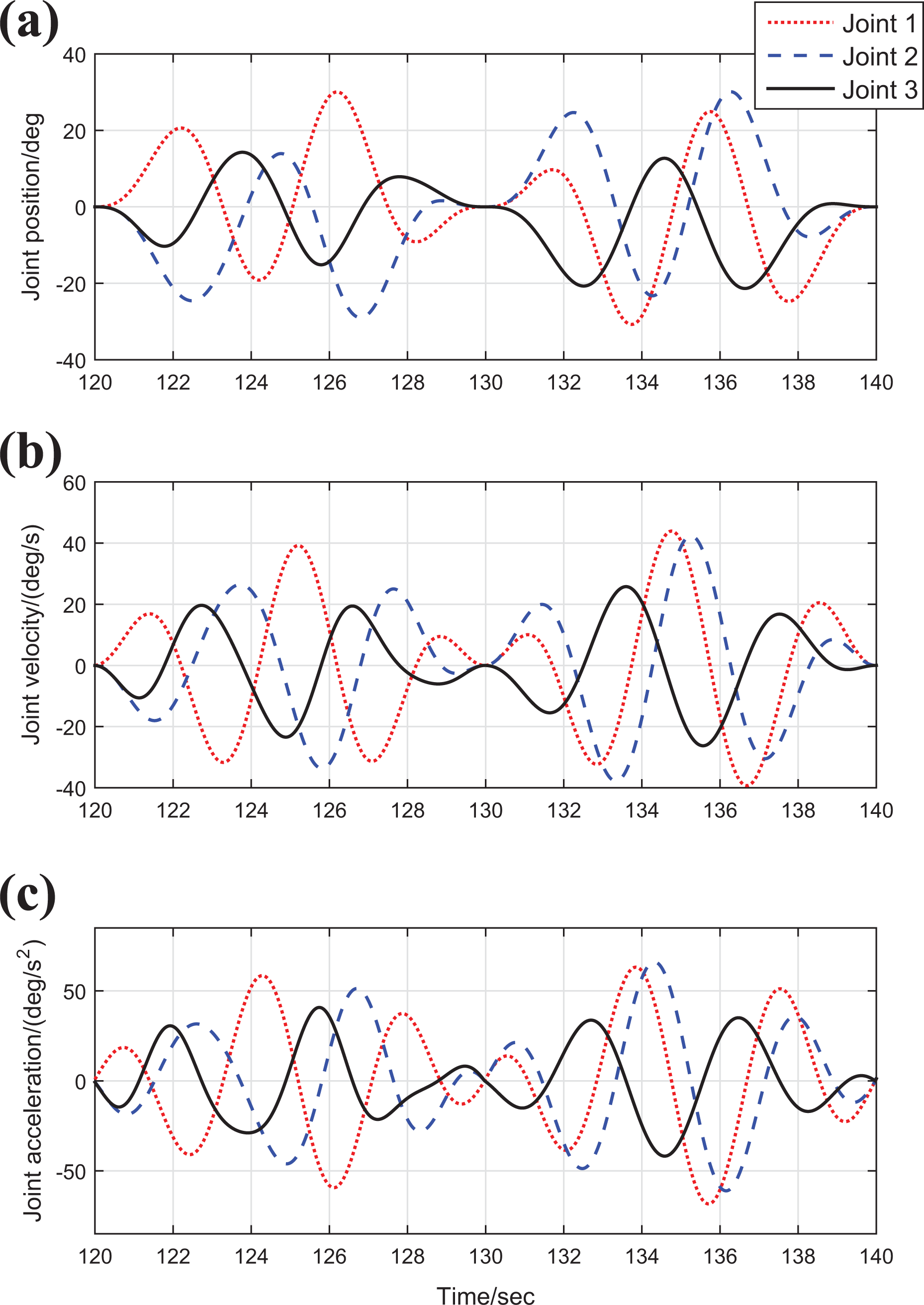
Reference trajectories for training. (a) Joint position. (b) Joint velocity. (c) Joint acceleration.
In the context of a three joint articulated manipulator, because the robot’s motion is centrosymmetric with respect to joint 1,
The regularization progressively strengthens as the value of λ increases, resulting in fewer nonzero regression coefficients and generally larger cross-validated mean square error suggesting inadequate fit of the responses. However, the parameter λ was automatically selected with the optimal value provided by Lasso function. Practically, for coefficient

Actual joint torque and estimated torque based on the proposed method for trajectories in Figure 5.
Figure 6 compares the measured and predicted torques, revealing the inverse dynamics can be reconstructed given the demanded motion. It is worth noting that the predicted torque roughly fits the actual torque well expect some derivation and there exists slight torque variation during the motion because a simplified dynamics identification process is adopted in this article. Meanwhile, the absolute residual value under free motion in Figure 5 can be calculated once the inverse dynamics is available, and the torque residual for each joint is depicted in Figure 7.

Residual signals for free motion (blue, solid line), collision (red, dashed line), and threshold (green, dashed line) for training trajectory in Figure 5.
It is observed that the residual signal fluctuates near zero except an abrupt peak arises when velocity changes its sign, which implies the reliability and practicality of the proposed dynamics identification. The abrupt peak arises when velocity changes its direction since it is difficult to accurately model the friction in low-velocity range. When velocity traverses the low-velocity regime, several phenomena like Stribeck effect, predisplacement, rate dependence, and hysteresis will significantly dominate the dynamics of friction. To address these dynamic behaviors in low-velocity regime, several friction models incorporating more coefficients and complicated structure were proposed such as LuGre model, Maxwell-slip model, and Leuven model. These models could to some extent illustrate the property of friction dynamics in low velocity, but the identification procedure is not trivial and the accuracy cannot be guaranteed. Indeed, the Coulomb–viscous model is still the most popular one in constructing the friction in robotics due to its linearity in parameters and satisfactory description of friction dynamics in most velocity regime.
In addition, collisions were imposed by operator on the manipulator when it executed the same trajectory and corresponding residual signals were computed as presented in Figure 7. In contrast to collision-free scenario, the peaks due to collisions have the influence on the residual as the model uncertainties do. Hence, the torque errors induced by the dynamics uncertainties including unmodeled dynamics and estimation bias will cause adverse effects on accurate collision detection, and this is tackled by employing the dynamic threshold.
The parameters for threshold is given in Table 4, and the corresponding reconstructed threshold is compared with the torque residual, as shown in Figure 7, illustrating the acquired threshold can bound the residual signal to ensure the detection mechanism not be activated by false alarms due to measurement errors and dynamic model uncertainties as well as small enough to allow fast detection of collision. The effectiveness of the proposed threshold was validated for a different trajectory as detailed in the following section.
Parameters of the proposed dynamic threshold.

Validation
The proposed scheme for sensorless robot collision detection was experimentally validated on the industrial robot ER3A performing a continuous cyclic motion task with a triangle curve in Cartesian space. The triangle motion in Cartesian space is with the maximal velocity of 0.2 m/s and trajectories in the joint space are calculated using the inverse kinematics.
Figure 8 shows the residual signal for each joint under different collision conditions. For example, a collision near 10 and 14 s is relatively moderate and these joint peaks may not be detected if static threshold was adopted. Thanks to the proposed dynamic threshold, the tiny torque peaks resulting from collision could be sensitively identified. For example, a collision occurred near 14 s and the effective torque caused by collision at joint 1 is smaller than the maximal dynamics error induced by model uncertainties. The dynamic residual threshold can also effectively recognize the source of the torque peaks. For the collision at t = 18 s, the peaks in residual signals were recognized at all joints, suggesting the unexpected collision with slight impact occurred at the body before the third joint. The effective external torque at joint level satisfies

Residual signals for free motion (blue, solid line), collision (red, dashed line), and threshold (green, dashed) for validation trajectory.
Conclusion
In this article, a current-based whole body collision detection is presented on a conventional industrial manipulator based on a quick dynamic model identification using Lasso and a residual evaluation method to overcome the dynamic model uncertainties. The presented method uses only proprioceptive sensors providing motor-side information without additional exteroceptive sensors. The collision effect is diagnosed as system fault through comparison between the actual torques related to the internal motor currents and the reconstructed torque from the joint position and its derivatives. In this framework, a sequential identification of dynamic parameters is introduced where the major components of the dynamics (i.e. gravity and friction) in pHRI scenario are identified in the first step and the remaining torque is formulated with a simplified model. On the basis of this model, Lasso algorithm is adopted to predict the relevant parameters along with parameter selection in order to capture the characteristic of the remaining torque. The residual signal which is defined as the difference of the actual and predicted torque is used to recognize whether the external impact is imposed on the robot. To tackle the irregular peaks due to dynamic uncertainties, dynamic threshold is imposed on the residual which ensures the sensitivity of the detection scheme as well as the robustness to false alarm caused by system errors.
The method has been implemented on a conventional industrial robot ER3A with EtherCAT protocol for real-time data communication. Instead of the classic parameter identification with complicated symbolic derivation and heavy computation burden for real-time control, the proposed method can fast and effectively reconstruct the inverse dynamic model. Consequently, the residual signal for collision detection is generated through the simplified model, and threshold is conceived to remedy the peaks due to system uncertainties. Compared with a static threshold, the dynamic threshold reduces the collision torque sensitivity from 10 Nm to 5 Nm while maintaining the robustness. Although the joint sensitivity does not share linear relationship with respect to the impact sensitivity in the Cartesian space, the impact can even be impossibly sensed if the impact force belongs to transposed Jacobian matrix kernel space. However, the robot always holds favorable configurations when robot shares workspace when collaborating with humans; external impact is reflected on the joint space with high fidelity which guarantees the detection of collisions occurs on the whole body of the robot. In our experiment, the collisions can be detected with the sensitivity less than 5 Nm in joint space with a short time delay less than 50 ms.
Despite a fast and simplified model identification, a dynamic threshold for residual signal is proposed to achieve a satisfactory whole body collision detection on an industrial manipulator; our future plan is to evaluate the sensitivity of forces in Cartesian space of the collision classification using a 6D F/T sensor. Additionally, the presented idea in recovering dynamics and residual threshold generation can be brought into the external force estimation at the end effector so as to realize a low-cost virtual force sensor which benefits the force-control scenario like assembly and human–robot cooperation. Further investigation directions in the collision detection also include collision detection scheme of a robot with payload fixed at the end effector and how the factors like speed and stiffness affect the accuracy of the collision and corresponding strategies.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Natural Science Foundation of China under Grant Numbers 61873308, 61503076, and 61175113 and Natural Science Foundation of Jiangsu Province under Grant Number BK20150624.
Appendix 1
Derive the robot dynamics equation using Lagrangian method, the kinetic energy
where
where
where
where
Usually, the generalized force
Finally, it could be concluded that the elements in