
Abstract
An adaptive iterative learning control approach based on disturbance estimation has been developed for trajectory tracking of manipulators with uncertain parameters and external disturbances. The external disturbances are estimated by the feedback iterative learning method, whereas the uncertain parameters are compensated by adaptive control. This approach which is based on the disturbance estimation technique provides a rapid convergence of trajectory tracking errors. According to the Lyapunov theory, the sufficient condition of the asymptotic stability has been developed for the 2-degrees of freedom (DOFs) manipulator system. The numerical results show that the adaptive iterative learning control approach based on disturbance estimation is feasible and effective for the 2-DOFs manipulator. A comparison of the adaptive iterative learning control method and the iterative learning control method is completed, which shows that the adaptive iterative learning control method performs a faster convergence of the disturbance to the steady state.
Keywords
Introduction
The robots are an important branch of robotics and an important part of today’s industry. The robots are mechatronics. Usually, it is assumed that each part of the robots is rigid, which is called as manipulator. The robots are widely used in reality, such as mobile robots, space robots, and soft robots. 1,2 A novel sliding mode control law was proposed for asymptotically stabilizing the mobile robot to a desired trajectory. 3 Moreover, a Kalman-based active observer controller was developed for the path following of wheeled mobile robots. 4 The trajectory tracking of the manipulators is a common problem in the manufacture industry, where the manipulators were unable to follow the desired trajectory without error. 5,6 However, the manipulator system always has different kinds of uncertainty. It cannot ensure the manipulators followed desired trajectory without errors. On the one hand, the parameters of manipulator system cannot be known in advance, for example, the quality and length of each link of the manipulators. Alternatively, considering the external environment, the manipulator system is usually attached by unpredictable disturbances. Even in the complex applications, the external disturbances may be random. Thus, the error can be caused by two factors: the uncertain parameters of the manipulators and the external disturbances. There were several control methods that had been developed and proved the effectiveness to solve the trajectory tracking problem, such as the proportional–integral–derivative control, 7 the fuzzy control, 8 the adaptive control, 9 the time-delay control, 10 –12 and the neural network control. 13 –18 Sophisticated control methods were required to guarantee the performance of trajectory tracking for the manipulators with uncertain parameters and unknown disturbances. 19 –23
As a widely used sophisticated control method, the iterative learning control (ILC), which is proposed by Arimoto et al., uses the errors and output signals acquired in the previous operation to modify the input signals of the current operation. 24 To solve the uncertainties of the system, a large number of researchers used adaptive iterative learning control (AILC) methods to estimate the uncertain parameters of the manipulator systems. 25 –28 In recent years, AILC method became a popular technique in the control field, which generalized lots of algorithms. The following algorithms were effective to reduce the external disturbances, for instance, Nussbaum function, 29 saturation function, 30 and separation technology. 31 A research developed an AILC method based on a fully saturated adaptive learning term and a time-domain feedback term, which aimed to estimate the uncertainty of the unknown time-varying systems. 32 Moreover, a proportional–derivative controller with an adaptive term had been presented to estimate the uncertain parameters. 33 Although these methods can assure that the output errors of the manipulators system could be uniformly converged in the time domain, the minor disturbances might lead the process of the convergence to diverge. 34 Hence, it is important to estimate the external disturbances during the trajectory tracking process. The concept of disturbance estimation observer was firstly proposed by Grignion et al., 35 as compensating disturbances. Due to the powerful applicability of disturbance estimation technique, a series of achievements had been obtained in recent years. The frequently applied disturbance estimation techniques were robust control and neural network. 36 –40 Furthermore, the feedback control had also been applied for compensating the disturbances. 41 However, manipulators were frequently used for repetitive tasks, where the traditional control algorithms were unable to assure the accuracy of the trajectory of the manipulators at each task. Therefore, the ILC for estimating disturbances was particularly important. An ILC system with a feedback action term representing the disturbance estimation for performing repetitive tasks had been proposed by Bouakrif and Zasadzinski. 41 To get a better tracking performance, this article would develop an AILC algorithm composed with disturbance estimation technique to achieve the manipulators on the desired trajectory.
This article contains three contributions. The first contribution is to construct an AILC scheme for trajectory tracking that uses the adaptive control and disturbance estimation technique. Secondly, it needs to provide a precisely proof of the asymptotic convergence for an AILC scheme based on disturbance estimation. Lastly, the effectiveness of the developed method needs to be testified based on the numerical results.
This article can be divided into five parts. In the second section, a controller is established that contains an iterative learning term and an adaptive term, which used to estimate the external disturbances and compensate the uncertainty parameters, respectively. In the third section, the verification process of the asymptotic stability is provided based on a Lyapunov function. In the fourth section, the simulation of the developed AILC scheme is achieved on a 2-degrees of freedom (DOFs) manipulator, where the results demonstrate the feasibility and effectiveness of the proposed method. Moreover, the developed method shows a faster convergence rate of tracking errors compared with the ILC method under the same numerical conditions. The result and future work are shown in the last section.
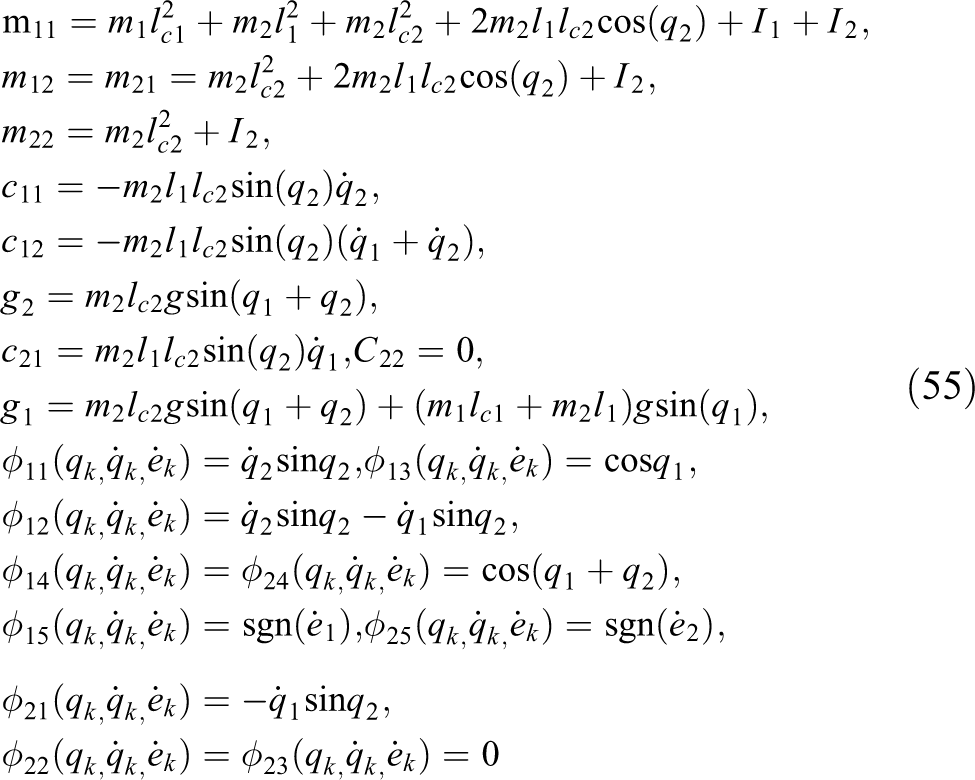
The dynamic model of manipulator
The equation of the dynamics model of manipulators with links is expressed as follows

where t is the time and the nonnegative integer k is the operation or iteration number, qk,
Equation (1) has the following properties which will be required: Property 1: The inertia matrix

where Property 2:

Property 3:

Property 4:
The lemma used in this article is summarized as below
Lemma 1: There considers a continuous function
,
, where

thus, there exists

where

and

Proof
Using the mean value theorem, there exists a vector

Therefore,

where
In this article, the reasonable assumptions are imposed as:
Assumption 1:
The range of the control input θ is
Assumption 2:
The adaptive rate
Assumption 3:
The disturbance
Assumption 4:
The control input
Assumption 5:

Adaptive iterative learning controller for manipulator system
When the 2-DOFs manipulator system has no uncertainty parameters and disturbances, for the convenience of writing and discussion, the time term is omitted and denoted
The Lyapunov function candidate is defined as follows

Using property 3, the derivate of (9) is given by
where


σ is the positive scalar constant.
Then, the following control law is given by

where
The uncertain parameters of the manipulators and the external disturbances cause the trajectory tracking errors of manipulator systems. Thus, the control law (11) cannot ensure the stability of system for manipulators with uncertainties and external disturbances. It is necessary to redesign the controller to ensure that the tracking errors is asymptotically stable. Therefore

where

Therefore, it can be assumed that

where
The uncertainty parameters are compensated by the following adaptive controller

with

where
The external disturbance is estimated by feedback ILC. Estimating external disturbance is designed as (17); therefore, the controller of the system is described as

with the disturbance estimation given by

If

where


and
Substituting (1) into (16), it can be described as

It can be seen that the
To simplify the notation, let

thus

Subtracting (20) with (19), the following equality holds

where

and

The analysis of this theorem involves three parts: (1) The first part is composed of constructing a Lyapunov function

Proof.
Part 1: The Lyapunov function candidate is considered as follows

where
The derivate of (24) is given by

From (16) and (25), the following equality is generalized as

Using (13), (14), (17), and (26) and after simple transformation, it follows

Substituting

Therefore

The following equation is considered as follows


Since

Using Youngs inequality, it can be written as

Hence

Considering (30) and (31), the following equality holds

Substituting

Combined (19) and (36), the following equality is described as
Due to assumption 1, assumption 3, and property 1, it is yielded that

where

Using Youngs inequality, it follows

Thus
Together with (30) and (34), it can be derived as

Since
Part 2: According to (24), the following equality holds

Let

Thereby

Now, the following equality is considered as

Considering (15), (43), and assumption 3, the following equality can be generalized as follows

where

Hence

The following inequality can be inferred from (43), (45), and (46)

Together with (23) and lemma 1 combined, the following inequality can be described as

where

It can be derived as follows

where

thereby, ξ is the positive definite matrix.
By combining (23), (48), (49), (50), and Assumptions 1– 4, the following inequality holds

As shown in (51), it follows

where

and

Thus

By combining (47) and (53), the following equality can be written as

Part 3: Based on (54), it can be computed that

Since

This completes the proof.
Simulation results
The objective of this section is to investigate the applications to 2-DOFs manipulator system via AILC method. The approach is implemented by MATLAB2014a. The tests are performed on a PC computer with CPU Intel(R), 3.30 GH. The numerical simulations are conducted on the model for trajectory tracking of the 2-DOFs manipulator, as shown in Figure 1. The model equations which are in the form of equation (1) can be written as follows

The 2-DOFs manipulator system.
The parameters of 2-DOFs manipulator are given by

and

are the estimated value of m1, m2.
Simulation parameters can be selected as follows

The desired trajectories are chosen as follows

and

The external disturbances are sine functions
The external disturbances are given by the following equations

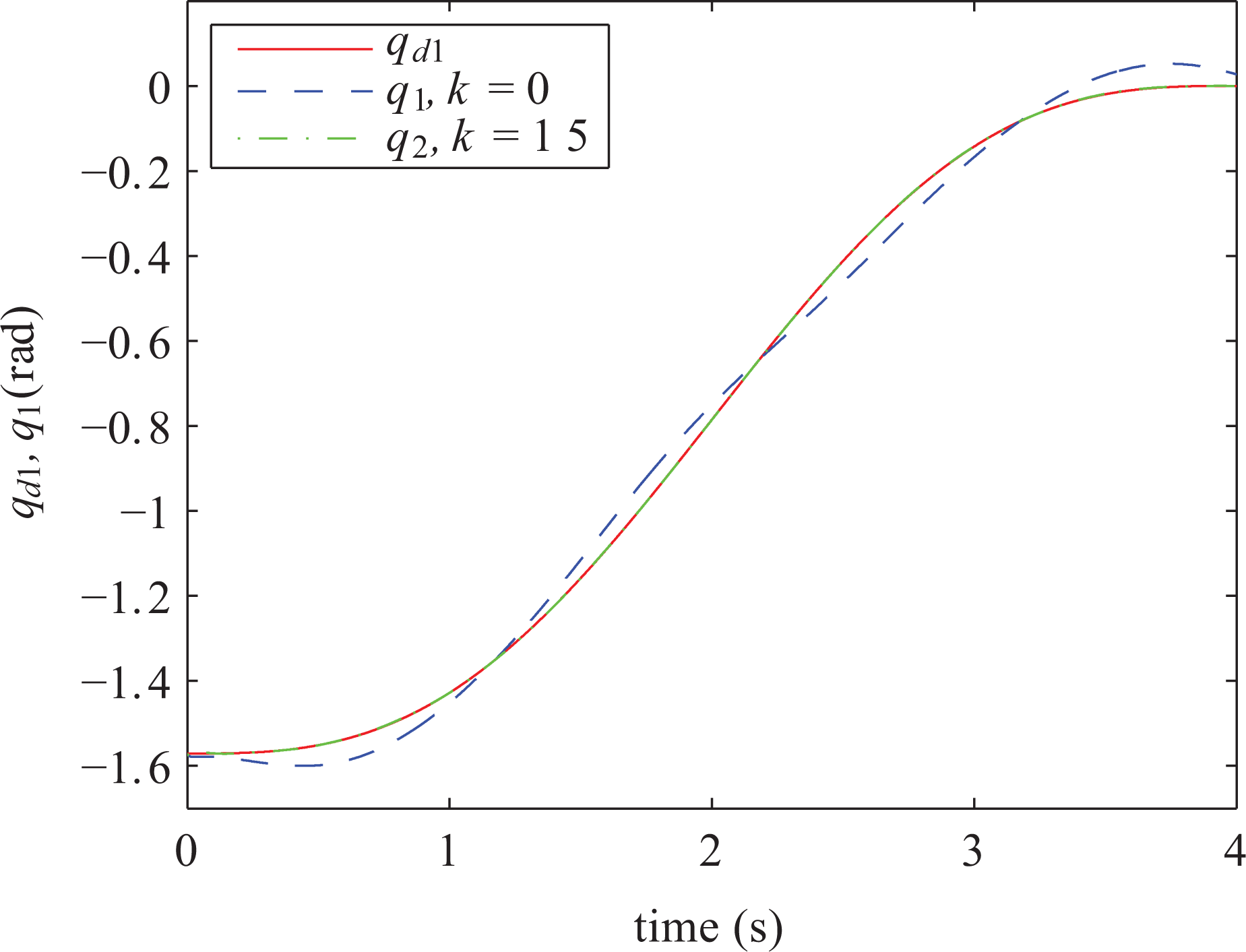
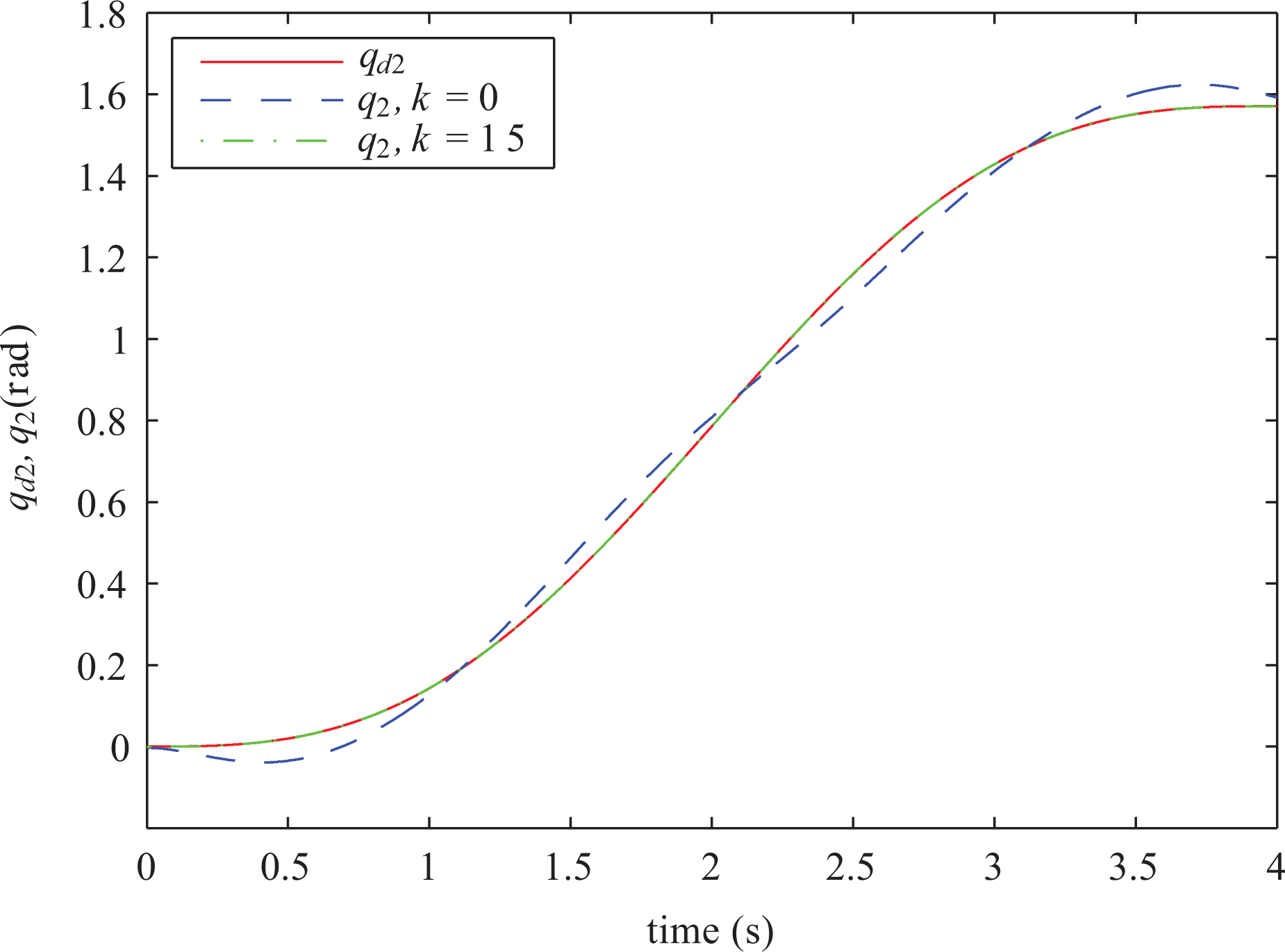
The simulation results are shown in Figures 2 to 7. The real and desired trajectories of each link for the 0th and 15th iteration are shown in Figures 2 and 3. The curves show that the real trajectory follows the desired trajectory over learning iterations. Thereby, trajectories of 2-DOFs manipulator system can achieve desired trajectory via executing 15 iterations.

q1 and

q2 and
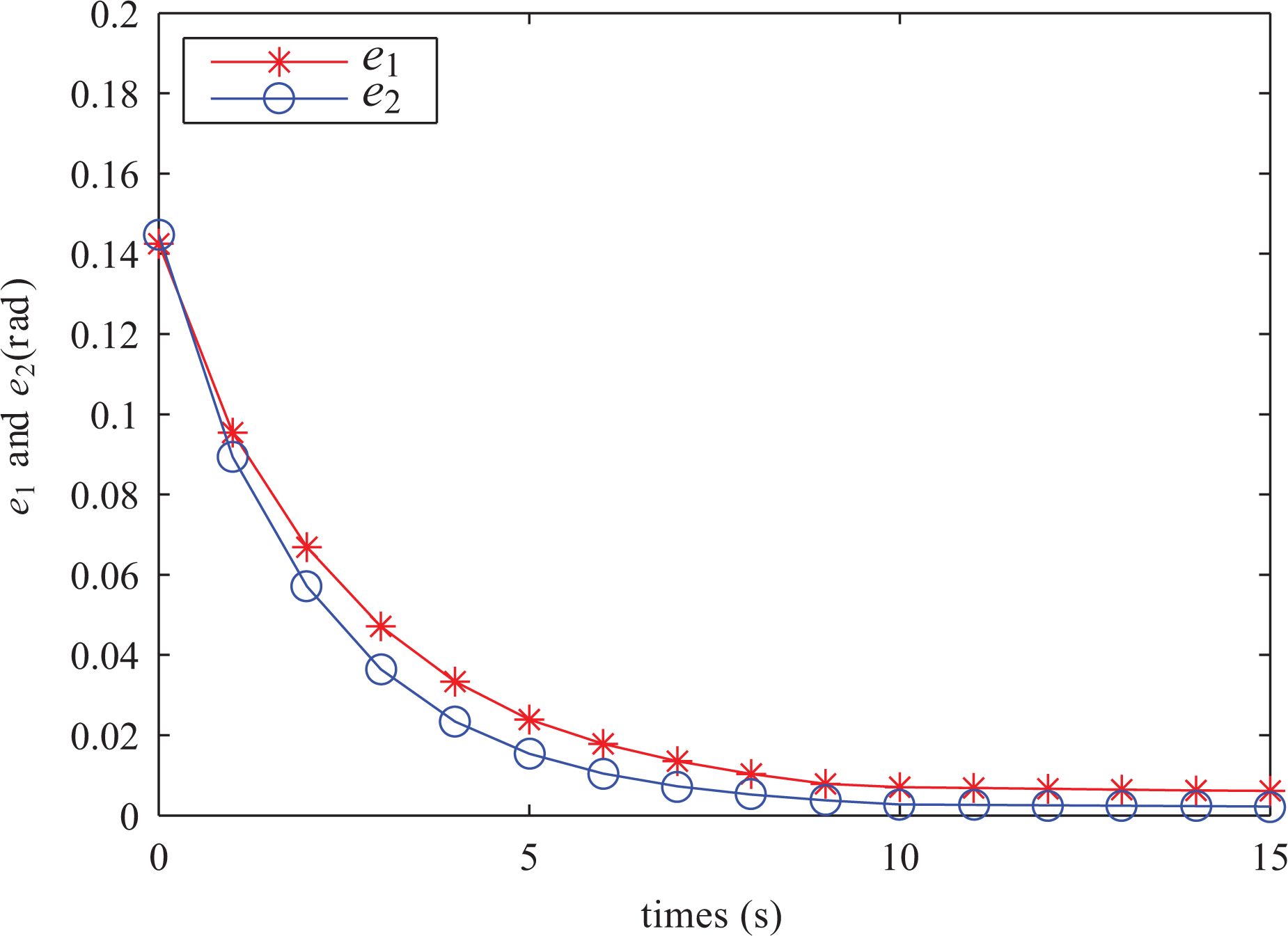
e1 and e2 of AILC in iterations with the external disturbances (sine function). AILC: adaptive iterative learning control.

e1 and e2 of ILC in iterations with the external disturbances (sine function). ILC: iterative learning control.

Comparison on e1 for the 10th iteration between ILC and AILC with the external disturbances (sine function). ILC: iterative learning control; AILC: adaptive iterative learning control.

Comparison on e2 for the 10th iteration between ILC and AILC with the external disturbances (sine function). ILC: iterative learning control; AILC: adaptive iterative learning control.
As shown in Figure 4, it shows the tracking performance of the developed algorithm over the first 15 iterations, where the tracking errors over the number of iterations. It can be seen that the maximum tracking errors of the first and second joints gradually tend to zero in iterations and keep the number for the 10th iteration. The tracking performance of the ILC scheme [41] over the first 20 iterations is shown in Figure 5. From Figures 4 and 5, it can be computed that the proposed AILC system in this article is faster compared with the ILC scheme of [41].
For the convenience of comparative analysis, numerical simulations are conducted adopting the developed algorithm and the ILC scheme of [41]. Figures 6 and 7 show that the proposed AILC law converges to be within the error for the 10th iteration, while the ILC law converges to be with some tracking errors at the same number of iterations. At the initial time, it shows that the ILC scheme of [41] has larger errors than the developed AILC algorithm.
The external disturbances are exponential functions
The exponential function disturbances are given as follows

The simulation results based on the AILC system with the exponential function disturbances are presented in Figures 8 to 13. It can be seen that Figures 8 and 9 represent the real trajectory of the 2-DOFs manipulator system follows the desired trajectory for the 30th iteration, respectively.

q1 and

q2 and

e1 and e2 of AILC in iterations with the external disturbances (exponential function). AILC: adaptive iterative learning control.

e1 and e2 of ILC in iterations with the external disturbances (exponential function). ILC: iterative learning control.

Comparison on e1 for the 10th iteration between ILC and AILC with the external disturbances (exponential function). ILC: iterative learning control; AILC: adaptive iterative learning control.

Comparison on e2 for the 10th iteration between ILC and AILC with the external disturbances (exponential function). ILC: iterative learning control; AILC: adaptive iterative learning control.
The tracking errors with respect to the developed algorithm and the ILC scheme in iterations are displayed in Figures 10 and 11. As shown in Figure 10, the theoretical initial tracking errors value of each link are 0.7 and 0.5 which much smaller than those in Figure 11. As seen from the figures, the convergence iterations of the tracking errors based on the developed algorithm to zero are becoming much shorter than those based on the ILC scheme. It can be computed that, under the same conditions, the convergence rate of the proposed AILC system in this article with the exponential function disturbances is rapider compared with the ILC scheme.
Moreover, to highlight the superiority of the developed algorithm, the tracking errors value with the AILC scheme is compared with the ILC scheme for the 20th iteration . The simulation results are listed in Figures 12 and 13, and the figures show that the proposed AILC scheme performs better than the ILC scheme at the same iteration number.
The external disturbances are random functions
The random function disturbances are presented as follows

Similar to the above two groups of numerical simulations, the developed AILC models are utilized to eliminate the disturbances as (58). The simulation results are shown in Figures 14 to 19. As shown in Figures 14 and 15, with the random-parameter of (58) randomly generated in
q1 and
q2 and

e1 and e2 of AILC in iterations with the external disturbances (random function). AILC: adaptive iterative learning control.

e1 and e2 of ILC in iterations with the external disturbances (random function). ILC: iterative learning control.

Comparison on e1 for the 10th iteration between ILC and AILC with the external disturbances (random function). ILC: iterative learning control; AILC: adaptive iterative learning control.

Comparison on e2 for the 10th iteration between ILC and AILC with the external disturbances (random function). ILC: iterative learning control; AILC: adaptive iterative learning control.
It is shown in Figures 16 and 17 that the developed algorithm law has faster convergence rate in iterations than that the ILC law. With the random function disturbances, the perfect tracking is achieved through only five iterations for the AILC law in this article. Thereby, with adaptive control and disturbance estimation technology, the convergence rate can be significantly improved.
Now, simulations with the developed algorithm and the ILC scheme for the fifth iteration are performed, and the simulation results are shown in Figures 18 and 19. It can be observed from figures that the tracking error values of the AILC system are very close to zero, while those of the ILC system to be with some errors for the fifth iteration.
From above the three groups of numerical simulations, for the external disturbances (56), (57), and (58), the developed AILC scheme based on disturbance estimation can solve the trajectory tracking of 2-DOFs manipulator with uncertain parameters and external disturbances. From the figures, the tracking errors of the developed algorithm for three groups of numerical simulations all converge to the zero more rapidly than the ILC algorithm under the same conditions. Through these numerical simulations, it can be obtained that the efficacy of developed algorithm is substantiated well.
Conclusions and future works
In terms of solving the trajectory tracking of 2-DOFs manipulator with uncertain parameters and external disturbances, an AILC approach composed with disturbance estimation technique has been developed in this article. The external disturbances were estimated by feedback ILC, whereas the uncertain parameters were compensated by adaptive control. The used approach has overcome the slow convergence of tracking errors. By constructing a Lyapunov function, the asymptotic stability which was monotonically decreasing has been certificated. Three kinds of external disturbances were discussed in this article, including sine functions, exponential functions, and random functions. For the convenience of comparative analysis, numerical simulations were, respectively, conducted adopting the developed algorithm and ILC scheme under the same conditions with three kinds of external disturbances. The simulation results presented the feasibility and effectiveness of the used method, as achieved it on a 2-DOFs manipulator.
In the future works, adaptive control and disturbance estimation technique of the developed AILC approach in this article can be used to combine with neural network control to construct models for eliminating disturbances with known dynamics. In addition, combining the discretized AILC scheme in this article with different control techniques can develop a variety of numerical algorithms. These developing numerical algorithms may be used to eliminate external disturbances for the manipulator-related applications, such as path planning and fault detection.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers and the technical editor for their valuable comments and suggestions on revising this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported in part by the Key Science and Technology Project of Jilin Province, China (20170204067GX); in part by the Significant Scientific and Technical Projects of Changchun, China (17DY032,17SS012); in part the Industrial Innovation Special Funds Project of Jilin Province, China (2018C038-2); in part by the national natural science foundation of China under grants 61873304; in part by the China postdoctoral science foundation funded project under Grant 2018M641784; and also in part by the key science and technology projects of Jilin province, China, Grant Nos. 20190302025GX, 20170204067GX, and 20180201105GX.