A biological swarm is an ideal multi-agent system that collectively self-organizes into bounded, if not stable, formations. A mathematical model, developed appropriately from some principle of swarming, should enable one, therefore, to study formation strategies for multiple autonomous robots. In this article, based on the hypothesis that swarming is an interplay between long-range attraction and short-range repulsion between the individuals in the swarm, a planar individual-based or Lagrangian swarm model is constructed using the Direct Method of Lyapunov. While attraction ensures the swarm is cohesive, meaning that the individuals in the swarm remain close to each other at all times, repulsion ensures that the swarm is well-spaced, meaning that no two individuals in the swarm occupy the same space at the same time. Via a novel Lyapunov-like function with attractive and repulsive components, the article establishes the global existence, uniqueness, and boundedness of solutions about the centroid. This paves the way to prove that the swarm model, governed by a system of first-order ordinary differential equations (ODEs), is cohesive and well-spaced. The article goes on to show that the artificial swarm can collectively self-organize into two stable formations: (i) a constant arrangement about the centroid when the system has equilibrium points, and (ii) a highly parallel formation when the system does not have equilibrium points. Computer simulations not only illustrate these but also reveal other emergent patterns such as swirling structures and random-like walks. As an application, we tailor the model accordingly and propose new autonomous steering laws giving rise to pattern-forming for multiple nonholonomic car-like vehicles.
An interesting research domain in robotics is formation control. This involves the design of controllers for multiple mobile agents such that the agents move in some bounded, if not stable, formation without colliding with each other or with obstacles.1 Recent applications are seen in the control of pattern formation of fleets of autonomous car-like vehicles or swarms of unmanned aerial vehicles for tasks such as aiding traffic management of automated highways, environmental monitoring, search-and-rescue in hazardous environments, and area coverage and reconnaissance.2–4
An exciting development in this area of research is the use of swarm principles to design the controllers. Animal swarming is considered an instance of collective self-organization, which is defined in the study by Camazine et al.5 as “a broad range of pattern-formation processes in both physical and biological systems, with the pattern being an emergent property of the system, rather than a property imposed on the system by an external ordering influence.” It has been hypothesized that animal swarming is an interplay between long-range attraction and short-range repulsion between the individuals in the swarm; attraction ensures a cohesive swarm while repulsion ensures a well-spaced swarm.6–8 An artificial swarm model developed appropriately from such a notion should thus exhibit emergent patterns such as (i) constant arrangements about a stationary centroid as seen, for example, in myxobacterial fruiting body formation,9,10 (ii) parallel formations seen in columns of ants,11,12 (iii) circular or oscillatory formations such as milling structures in schools of fish,13 and (iv) random walks such as the Lévy flight which describes a seemingly random but bounded pattern of foraging and animal hunting.14 An exhaustive list of emergent patterns is provided in the study by Camazine et al.5 An interesting new direction of enquiry in formation control deals with how to control an artificial swarm to settle into a desired pattern.15
The efforts of researchers over the last three decades to understand swarming have resulted in two different approaches to modeling; the Eulerian and the Lagrangian approaches.16 In the Eulerian approach, the swarm is considered a continuum described by its density in one-, two- or three-dimensional space. The time evolution of swarm density is described by partial differential equations. In the Lagrangian approach, the state (position, instantaneous velocity and instantaneous acceleration) of each individual and its relationship with other individuals in the swarm is studied; it is an individual-based approach, in which the velocity and acceleration can be influenced by spatial coordinates of the individual. The time evolution of the state is described by ordinary or stochastic differential equations. A review of different approaches can be found in the study by Carrillo et al.17 A recent analysis of cohesiveness in a Lagrangian-type model incorporating collision avoidance is given in the study by Li.18
An alternative approach to understanding coherent swarm structures can be traced to the work of physicists who consider individuals in a swarm as self-propelling particles governed by discrete equations.19 These models of discrete swarm structure use iterative methods which provide recursion formulas that update the position, velocity, and orientation of an individual with respect to other individuals. Extensive simulations are required to validate the models, the simplest of which merely assume that individuals move at a constant speed, and, at each time step, each one travels in the average direction of motion of those within a local neighborhood. A similar approach adopted by computer scientists is called the particle swarm optimization, wherein the velocity and position of a point mass is governed by a computer algorithm rather than differential or discrete equations. A recent survey of methods can be found in.20
The swarm model proposed in this study is individual-based or Lagrangian. Adopting the hypothesis that swarming is an interplay between long-range attraction and short-range repulsion between the individuals in the swarm, we consider spacing between individuals, each of which moves with the velocity of the swarm centroid, of primary importance. While attraction ensures cohesiveness, meaning that the individuals in the swarm remain close to each other at all times, repulsion ensures it is well-spaced, meaning that no two individuals in the swarm occupy the same space at the same time. To our knowledge, the cohesiveness and well-spaced notions are being treated for the first in a rigorous manner in this article. The method utilized is the Direct Method of Lyapunov via which a Lyapunov-like function with attractive and repulsive components is constructed. The function enables us to establish the existence, uniqueness, and boundedness of solutions about the centroid. This paves the way to prove that the swarm model, governed by a system of first-order ordinary differential equations (ODEs), is cohesive and well-spaced. We go on to show that the model can collectively self-organize into two stable formations: (i) a constant arrangement about the centroid when the system has equilibrium points, and (ii) a highly parallel formation when the system has no equilibrium points. Computer simulations not only illustrate these but also reveal other emergent patterns such as swirling structures and random-like walks. The results in this article are new or are a refinement of the author’s work thus far in this area.21,22
We begin by developing the model in the “A two-dimensional Lagrangian swarm model” section, deriving the velocity controller of each individual via a Lyapunov-like function in the “Velocity controllers” section and discussing the properties of the function in the “Roles of the parameters in the Lyapunov-like function” section. Before we provide the main result of this article in the “A well-placed and cohesive system” section, which is on boundedness, we give several illuminating and insightful examples of the model dynamics in the “Examples of system behavior” section. We then proceed to look at situations when equilibrium points can exist (“Equilibrium points of system (4)” section) and when they cannot, in which case a pattern emerges, namely the parallel formation (“Parallel formation in the absence of equilibrium” section). The results are applied accordingly to a swarm of autonomous nonholonomic planar vehicles (“Application to planar mobile car-like vehicles” section).
A two-dimensional Lagrangian swarm model
We begin the construction of our swarm model by adopting two terms from Mogilner et al.16 as working definitions of a swarm. The rigorous definitions of the terms are given at the end of this section.
A system is well-spaced if the system represents a group which does not collapse into a tight cluster.
A system is cohesive if the system represents a group in which the distances between individuals in the group are bounded from above.
A swarm is a well-spaced and cohesive system that represents a group or aggregate of individuals.
Consider a swarm of individuals. Following previous work such as those in Mogilner et al.16 and Gazi and Passino,6 we consider the individuals as point masses. At time , let , , be the planar position of the ith individual, which we shall define as a point mass residing in a disk of radius ,
The disk is described in Mogilner et al.16 as a bin, and in Gazi and Passino6 as a private or safety area of each individual. We shall use the former term, with the bin size being the radius rV of the disk. As noted in Mogilner et al.,16 the members of a cohesive swarm tend to stay together and avoid dispersing. In a well-spaced swarm, some minimal bin size exists such that each bin contains at most one individual. Moreover, the size of such a bin is independent of the number of individuals in the group.
Let us define the centroid of the swarm as
At time , let be the instantaneous velocity of the ith point mass. Using the above notations, we have thus a system of first-order ODEs for the ith individual, assuming the initial condition at
Suppressing t, we let and be our state vectors. Also, let . If the instantaneous velocity has a state feedback law of the form , , for some constants and some continuous functions and , to be constructed appropriately later, and if we define and , then our swarm of n individuals is
If the system has an equilibrium point, we shall denote it by
We end this section by rigorously defining a well-spaced and cohesive system. Let ,
and for .
Definition 2.1
System (4) is well-spaced if the solution of system (4) exists for all and
for all , , and .
Lemma 2.2
If system (4) is well-spaced, then for all .
Proof
If the outcome of Lemma 2.2 is false, then there must be a time such that . Then for every , we have that . Consequently, for some two , , , it is possible that , which contradicts Definition 2.1.
Note if , then . Hence, the idea of a well-spaced swarm makes sense only if .
For cohesiveness, we adopt the following rigorous definition by Lemmon and Sun23:
Definition 2.3
System 4 is cohesive if there exist real constants such that and .
Obviously the two limits exist if for all .
Velocity controllers
Our control objective is to construct the functions and , and hence the instantaneous velocity , , for every individual , via a Lyapunov-like function that should establish the boundedness and therefore the cohesiveness of system (4).
Attraction to the centroid
We can ensure that individuals are attracted to each other and also form a cohesive group by having a measure of the distance from the ith individual to the swarm centroid. This is the concept behind flock-centering or cohesion, which is one of the well-known three heuristic flocking rules of Reynolds’ applied to virtual agents he called boids24:
Separation: Each boid must steer to avoid colliding with local flock-mates;
Alignment: Each boid must steer toward the average heading of local flock-mates; and
Cohesion: Each boid must steer to move toward the average position (center of mass or centroid) of local flock-mates.
Flock-centering minimizes the exposure of a member of a flock to the flock’s exterior by having the member move toward the perceived center of the flock. It is therefore a form of attraction between individuals. Centering necessitates a measure of the distance from the ith individual to the swarm centroid. For this purpose, we consider the function
where are sufficiently small constants. As we shall see later, the role of the constants is to ensure that system (4) has a global solution which is defined for all time . We remind ourselves of the importance of the existence of global solutions for system (4) to be well-spaced (see Definition 2.1).
Interindividual collision avoidance
The short-range repulsion between individuals necessitates utilizing a measurement of the distance between the i th and the j th individuals, , . For this purpose, we consider the function
A Lyapunov-like function
To obtain the appropriate instantaneous velocity of the individuals, we construct a Lyapunov-like function. Accordingly, let there be constants and , and define, for
Consider as a tentative Lyapunov-like function for system (4)
It is positive over the domain
The time-derivative of L along every solution of system (4) is
where
Noting that for any , , we simplify the expression to
Also, we can show that
Collecting terms with and , and substituting and from system (3), we have, along a trajectory of system (4) (on suppressing )
Let
and
Thus
Let there be numbers and such that
Then
for all .
We have thus obtained a simple Lagrangian swarm model in the form of system (4) with components (3), where the velocity components are given in (11).
Roles of the parameters in the Lyapunov-like function
As we shall see in later sections, the parameters in the Lyapunov-like function play the major role in inducing a particular stable pattern. In this section, we provide an overview of the roles of the parameters.
Consider again our Lyapunov-like function (7). At large distances between the i th and the j th individuals, the ratio
is negligible, and the term dominates and acts as the attraction function; each individual is attracted to the centroid, and therefore system (4), as we shall show rigorously in the “A well-placed and cohesive system” section, maintains cohesiveness at all times. Thus, the parameter can be considered as a measurement of the strength of attraction between an individual i and the swarm centroid . The smaller the parameter is, the weaker the cohesion of the swarm is. Hence, can be called a cohesion parameter.
Consider now the situation where any two individuals i and j approach each other. In this case, decreases and ratio (12) increases, with acting as a coupling parameter that is a measurement of the strength of interaction between the individuals. In this way, ratio (12) acts as an interindividual collision avoidance function, because it can be allowed to increase in value (corresponding to avoidance) as individuals approach each other. However, as we show rigorously in the “A well-placed and cohesive system” section, collision avoidance occurs without the danger of the individuals getting too close to each other, or the swarm collapsing on itself; simply put, is not possible in . We have therefore met the short-range repulsion requirement in an individual-based model. Note that the increase in the ratio (12) does not translate to an increase in , simply because L is nonincreasing in t and any increase in the ratio gives a smaller or the same value of L at time t compared to all previous values of L.
We have used two other parameters, and in system (4). Because the parameters are a measure of the rate of decrease of at time , we name them convergence parameters. The larger the convergence parameters, the quicker the movements of the individuals toward and about the centroid.
In summary, the cohesion parameters (), the coupling parameters (), and the convergence parameters () make up the control parameters of the system.
Examples of system behavior
Before we consider the existence, uniqueness, and boundedness of solutions of system (4) in the next section, we look at some interesting dynamics of the system. These illustrations will deepen our intuitive insight into the behavior of the solutions.
Example 5.1 (constant arrangement about the centroid)
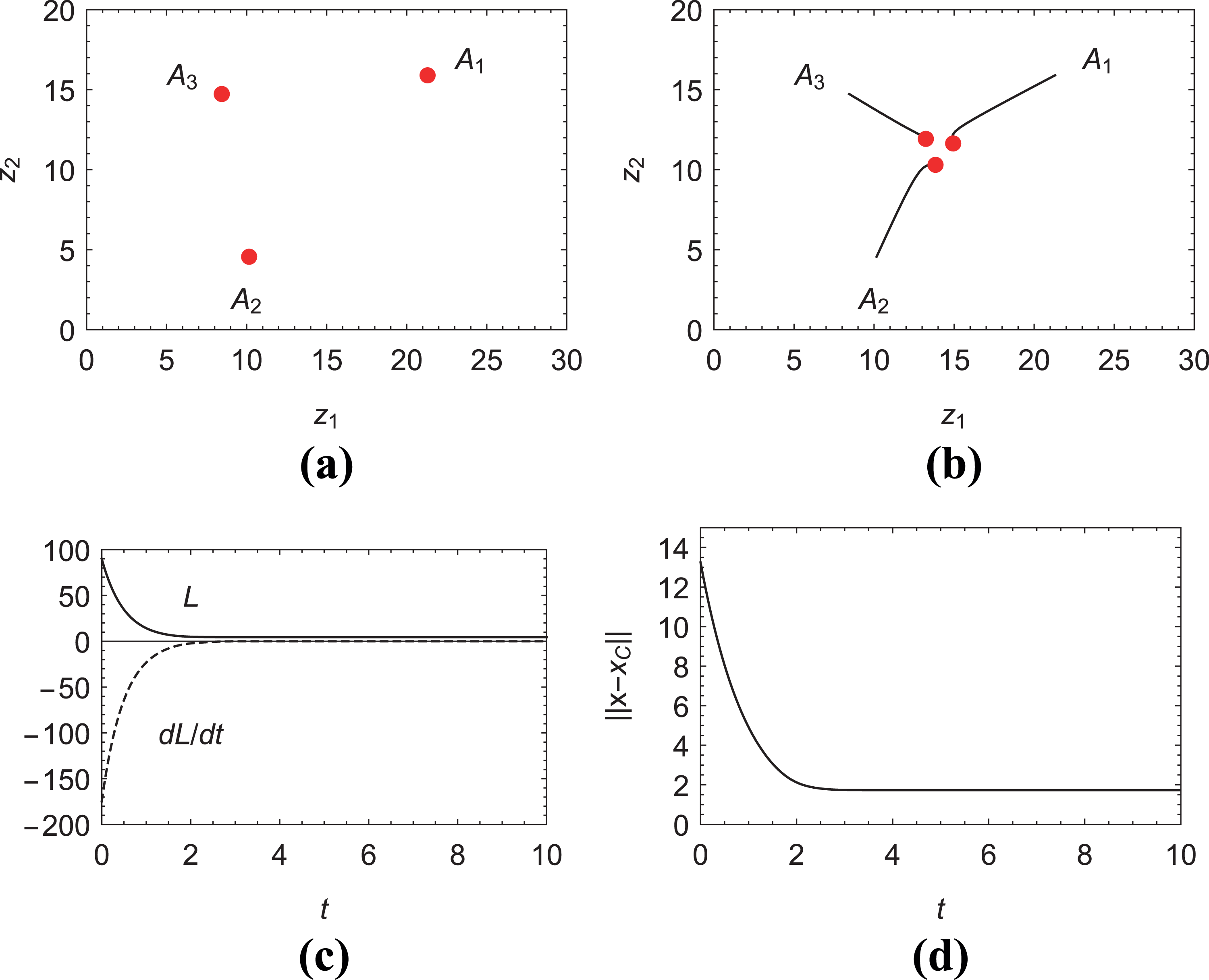
In this example, we consider a swarm of three individuals, each with bin size . With and the control parameters set at , , it is seen in Figure 1 that system (4) has an equilibrium point.
The initial positions of the three point masses A1, A2, and A3 are shown in diagram (a). They are , , and , respectively. Diagram (b) shows the positions where A1, A2, and A3 ceased motion. They are , , and , respectively. Thus, . Diagram (c) shows the monotonic Lyapunov-like function with and for all . Diagram (d) shows that the solution are bounded about the centroid .
Example 5.2 (parallel formation)
In this example, with individuals, each with bin size , the swarm eventually moves in a straight line, with the each individual heading in the same direction and angle. The individuals A4, A7, A6, and A5 follow the centroid’s trajectory (central thick line in Figure 2), with the emergent leader being A4. The others follow paths parallel to it, with A1, A3, A8, and in the outer lanes, and A2 and A9 in the inner lanes.
With the given initial positions shown in (a), and the choices and , , the point masses eventually move in a parallel formation, as shown in diagram (b) by units of time. In diagram (c), the monotonic Lyapunov-like function is shown, with and which implies that the system of point masses does not cease motion and eventually cruises with a constant speed. Diagram (d) shows that the solution of system (4) is bounded about the centroid.
Example 5.3 (swirling structure)
In this example, with , the point masses, each with bin size , seem to wander randomly before settling down to a swirling pattern. The cohesion parameters, γi, are set at 1, the coupling parameters, , are randomized between and including 1 and 30, and the convergence parameters, μi and φi, at set at 1. The constants εi are chosen to be . Figure 3 shows the positions of the point masses at units of time, the monotone nature of the Lyapunov-like function, and the boundedness of solution with respect to the centroid .
The dashed line in diagram (a) plots the trajectory of the centroid, which clearly shows an emergent swirling structure with an empty core. In diagram (b), we have that and which implies that the system of point masses does not cease motion. Diagram (c) shows that around the centroid, the movements are erratic but bounded before settling down.
Example 5.4 (random-like walks)
A random walk is a random process consisting of a sequence of discrete steps of fixed length.25 In this example, with , the point masses, each with bin size , display random-like walks. The cohesion parameters are , the coupling parameters, , are randomized between and including 100 and 600, the convergence parameters μi and φi, are set at 5, and the constants εi are chosen to be . In Figure 4, the grayish areas are trajectories of each individual, whereas the black trajectory is the trace of the centroid, given over the time period .
The simulation shows a cohesive group with individuals hovering excitedly about the centroid in a random fashion. As they change positions, the centroid traces out a series of straight segments interrupted by tight turns. As in previous examples, the Lyapunov-like function is monotonic, and the solution is bounded about the centroid. (a) A random-like walk and (b) a zoomed-in centroid path at t = 500.
A well-spaced and cohesive system
The examples in the previous section provide helpful intuitive insights into the behavior of system (4). They seem to suggest that the solutions are bounded about the centroid. In this section, we will show that, indeed, it is the case. We begin by showing that system (4) is well-spaced, which, according to Definition 2.1, means that the solution of system (4) exists and is unique for all time in the domain .
A well-spaced system
Looking at the right-hand side of equations (9) and (10), we see that the functions that appear in the denominator are , , . Hence, we can easily conclude that , which implies that at least on some time interval , , the solution of system (4) exists and is in . Indeed, since the functions appear in the denominator in (9) and (10), they will also appear in the denominator in higher-order partial derivatives, with each derivative continuous on . This means that is locally Lipschitz on , that is, . This implies the solution of system (4) exists and is unique in on the time interval .
We shall next attempt to show that exists and is unique for all time in .
We begin by observing that since the time-derivative of L along the solution of (4) is nonpositive, we have
From the form of L in (7), equation (13) implies that for every ,
Let and . Then from (14), we get
Given the form of in (5), the second inequality in (15) gives
and hence, if
Now, consider and given in (9) and (10), respectively. If we let and , then we estimate them as follows
and
Recalling , we have
Then with respect to the solution that exists on , we have, therefore, from the inequalities (15) to (18), the estimate, for some constants independent of
It follows from (19), therefore, that for some independent of , we have the estimate
which implies that the function is linearly bounded on . We shall now show that by this estimate and the comparison theorem the solution can be extended on . To this end, consider again system (4). By taking the inner product of the first equation of (4) and , we have, by estimate (20)
Let . Then we have the differential inequality
Comparing (22) and (21), it is easy to see that
The a priori boundedness (23) of implies the extension of the solution of (4) on , being independent of α. Hence, we are assured of the existence and uniqueness of in for all time . It follows therefore that system (4) is well-spaced.
Theorem 6.1
System (4) is well-spaced.
Cohesiveness of system (4)
We establish the cohesiveness of system (4) by proving the boundedness of about over the domain . We follow the classical work of Yoshizawa,26 who worked on the boundedness of solutions with Lyapunov-like functions.
Definition 6.2
The solution of (4) is equi-bounded about if for every and , there exists a such that if , then for all .
Definition 6.3
The solution of (4) is uniformly bounded about if B in Definition 6.2 is independent of .
Lemma 6.4
The solution of (4) is uniformly bounded about .
Proof
Given and , let be a solution of (4) in such that . Let , , and . Further, define the functions and by
respectively, where L is the Lyapunov-like function given in (7). It is clear that the functions are independent of and for all . Given that a and b are continuously increasing functions in r and as , we can choose a so large that
We shall now show, by contradiction, that there exists a constant such that if , then for all . At the onset, we note that since
we have
Moreover, since , which implies that
we can see that
Now, assume contrarily that for any , there exists a such that but
By the continuity of solutions, we can find t′ and t″ such that and
Set
and
Then
and
Thus, by (27), we have
and by (25)
Since , we have, by (26)
so that
which however clearly contradicts (24) and, thus, our choice of in (28). Hence for all . This ends the proof of Lemma 6.4. □
We can now readily establish cohesiveness via Lemma 2.2 and Lemma 6.4.
Theorem 6.5
System (4) is cohesive.
Proof
By Lemma 2.2 and Lemma 6.4, we have that
Hence both
exist. Now, from the decreasing property of the Lyapunov-like function (7), we have, for all
Thus
Hence, Definition 2.3 is satisfied if we choose
Equilibrium points of system (4)
In this section, we show that system (4) can have equilibrium points, which must correspond to that solves . In other words, we need to simultaneously solve and given in (9) and (10), respectively. Now, we note by observation that these equalities hold if for all . However, this means that for some sufficiently small , for all , , at some time . This violates our requirement that or at every in . Hence, we proceed to solve and with . Accordingly, let
Then (9) becomes
Then letting , we have
Similarly, on solving , we get
In solving and , we want to avoid the trivial solution. Since we only want to know whether we will have equilibrium points, let us consider the special case where
Then the second term of (30) and (31) reduces to zero. The first term also reduces to zero since
Now, from (32), we have, if n = 3, for example
which imply that , , and . In general, (32) implies that
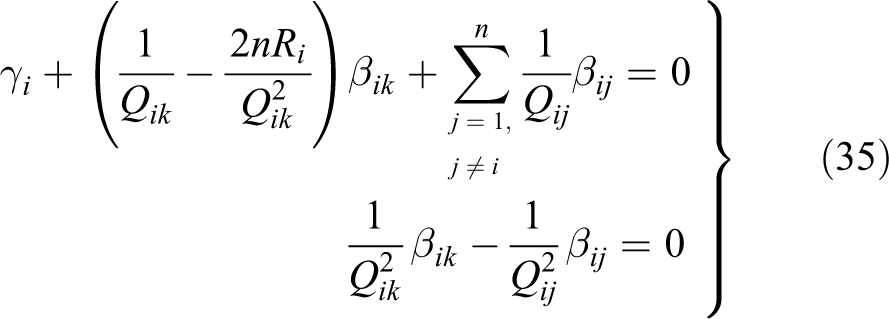
Equations (32) and (33), therefore, respectively provide us the following important relationships
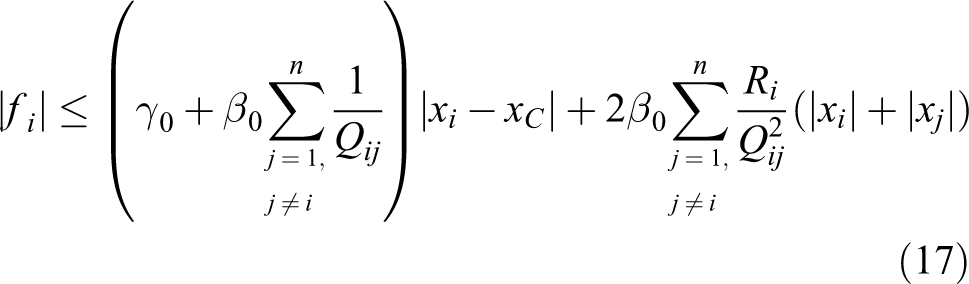
From (34), we can build a homogeneous system of linear equations with respect to the control parameters , , and , for all , ,
or, in matrix notation
Here, is the coefficient matrix of system (35). The entries of consist of
where the and Ri are calculated at , that is, . The vector is an vector, the entries of which consist of the control parameters .
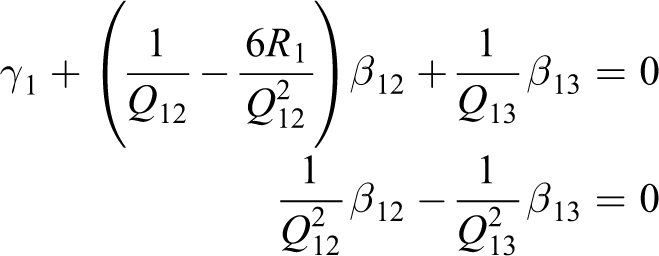
For the case , since and , which means that , system (35) gives
Consider the special situation where . Then, since and for any point , we have
Thus
Now, rank , and nullity . The former implies that for every point that generates q, there are nontrivial solutions . The latter implies there are two basis vectors for the null space of ; they are and . Since we want the parameters to be positive, we can add the basis vectors to get for some scalar . Hence, if we choose , then the point that makes is an equilibrium point of system (4).
The rank and the nullity of are 6 and 3, respectively. Thus, we can conclude that for every point , we have nontrivial solutions of system (38). The three basis vectors for the nullspace of are
which can be added to obtain positive parameters. The points that produce the positive parameters constitute therefore the equilibrium point of system (4).
In a similar way, we can construct homogeneous systems of linear equations from (35) for higher values of n.
In summary, from equation (35), we can obtain the homogeneous system of linear equations (36), where matrix is an coefficient matrix whose entries consist of the values of and Ri at . The vector is an vector of control parameters , , , . Since rank , the homogeneous system (36) has infinitely many solutions . Since we want , the n basis vectors of the null space of can be added to obtain all positive entries in . The point that generates the entries in and the positive entries in such that is the equilibrium point of system (4).
Parallel formation in the absence of equilibrium points
In the previous section, when we simultaneously solved and , we found a solution, namely, a set of equilibrium points. In this subsection, we show that a further analysis produces an unexpected solution—an emergent pattern that so far has only been numerically obtained by other researchers, namely, a highly parallel group, which arises due to the absence of equilibrium points.
Let us now assume that for certain values of the control parameters and , we have
and
We can thus solve (41) and (42) simultaneously to get an equilibrium point . For the i th case, we need to simultaneously solve the four equations
noting that the first and third equations come from the fact that . From these equations, since and in , it must be that and , for all , . This implies that an equilibrium point must be where all the individuals collapse onto each other. However, this is impossible in . Hence, it must be that and , for all , . Thus, we are left with only the second and forth equations to solve simultaneously
This is solvable to give the set of lines
for all , . Consequently, in , if (44) holds, then
which also tells us, since , there is no equilibrium point in in the special case where (44) holds. In conclusion, since a line in S can be written as
or
we can encounter two possible scenarios.
Line tells us that any point mass Ai can be on the same line that joins its position to the position of the centroid . Its slope is equal to , the slope of a line that would have existed if Ai and Aj were on it. This simply means that at least one point mass will be on while the rest of the point masses will be on other lines parallel to .
Similarly, line tells us that at least two point masses Ai and Aj will be on a line parallel to a line whose slope is and which would have existed if Ai and the centroid were on it. The other members of the group will be on lines parallel to .
Other researchers have reported this type of emergent behavior using their swarm model. For example, Couzin et al.27 described this behavior as is an instance of highly parallel group, which is a group that self-organizes into a highly aligned arrangement with rectilinear motion. The same behavior is reported in Liu et al.28 and Xue et al.29 However, these papers only manage to numerically generate the pattern. Our result gives a first explicit formulation of the pattern.
Application to planar mobile car-like vehicles
In this section, we apply our method of developing the Lagrangian swarm model to design the velocity controllers of autonomous car-like robots. We reproduce the description of the robots from the authors’ work in Vanualailai et al.,30 starting with Figure 5 which shows the i th car-like with front wheel steering and engine power applied to the rear wheels. For each car i, let be the distance between the two axles and the length of each axle. Assuming that , the kinematic model of the car-like robot with respect to its center is, as shown in Pappas and Kyriakopoulos31
where the variable θi gives the robot’s orientation with respect to the -axis of the – coordinates, and υi and ωi are the instantaneous translational and angular velocities, respectively. To ensure that the i th vehicle safely steers pass other vehicles, we enclose it by the smallest circle possible. As shown in Figure 5, if we let and be the clearance parameters, then we can enclose the vehicle by a protective circular region centered at , with radius . We can thus take equation (1) as the definition of our car-like robots. Accordingly, our system consists of the robots Ai as members of a swarm. The centroid of the swarm is given by (2). Our objective is to design the translational velocities υi and the angular velocities ωi such that robots are attracted to the centroid as a cohesive and well-spaced swarm.
The i th planar mobile robot which is car-like, with front wheel steering and steering angle ϕi.
Velocity controllers for the vehicles
Let us extend the definition of the independent variable from to , and . Then (45) is the i th component of the system
where , , and and are matrices defined as
and
respectively. We can use defined in (5) for the attraction to the centroid and defined in (6) for interindividual collision avoidance. Then applying the Lyapunov-like function (7) to system (46) over the domain
we have, noting that since L does not contain a function of θi, and using and defined in (9) and (10), respectively
Accordingly, we can define the steering control laws as
where we want to be some arbitrary positive function of and only, and differentiable over . With these control laws, we have, with respect to system (46)
With (47), system (45) simplifies to
The first two equations in (48) are independent of θi. That is, the positions are determined by , , and , which are functions of and only. Hence, it is sufficient to study the reduced system
and let it the be the i th component of the system
where . Since we are supposing that , , where
system (50) has the same form and property as system (4). It is therefore well-spaced and cohesive in .
Restrictions on velocities and steering angles
A practical consideration is the mandatory restrictions on the velocities and the steering angle. In our case, the function plays an important role restricting the size of the steering angles φi. To see this, let and , with . As shown in Pappas and Kyriakopoulos,31 the relationship between the translational velocities, υi, and the angular velocities, ωi, is governed by
From (51), we easily have
Now, given any constant , we have, from (47)
If we set , for instance, then the first inequality in (53) holds. Further, the second inequality in (53) and the inequality (52) are consistent if we let
from which we get . Thus, from (51), we have and . In other words, if we set , then the maximum steering angle of every vehicle is set at .
In our simulations, we shall illustrate that an appropriately chosen that is continuous on and satisfies (53) is sufficient to induce swarming with emergent patterns. If we choose, for example
we can also show, along similar arguments as the above, that .
Simulations
For our simulations, we use the first two terms, and in (48) to obtain the positions of the i th vehicle, and the third term to obtain its orientations, , at time . At time , the initial positions and orientations are randomly generated. The vehicles are drawn as arrows, with the arrowhead indicating the front of the vehicles. In each simulation, we use the following parameters:
Clearance parameters: ;
Width and length of vehicle: , ;
Radius of circular protective region: ;
Maximum speeds and steering angle: , ;
in (53).
Additionally, since theoretically we require that , we can choose as suggested in the previous section. However, we shall use (54) to illustrate that it is sufficient that is continuous on to induce emergent patterns.
With the above parameters fixed, the remaining parameters are the cohesive parameters and the coupling parameters , for . As discussed in the “Roles of the parameters in the Lyapunov-like function” section, the cohesive parameters provide the strength of attraction between individuals and the coupling parameters provide the strength of repulsion between individuals.
We will consider two examples, each with only five vehicles to clearly illustrate the behavior of each vehicle. The first example illustrates the existence of an equilibrium point, while the second example illustrates the absence of one.
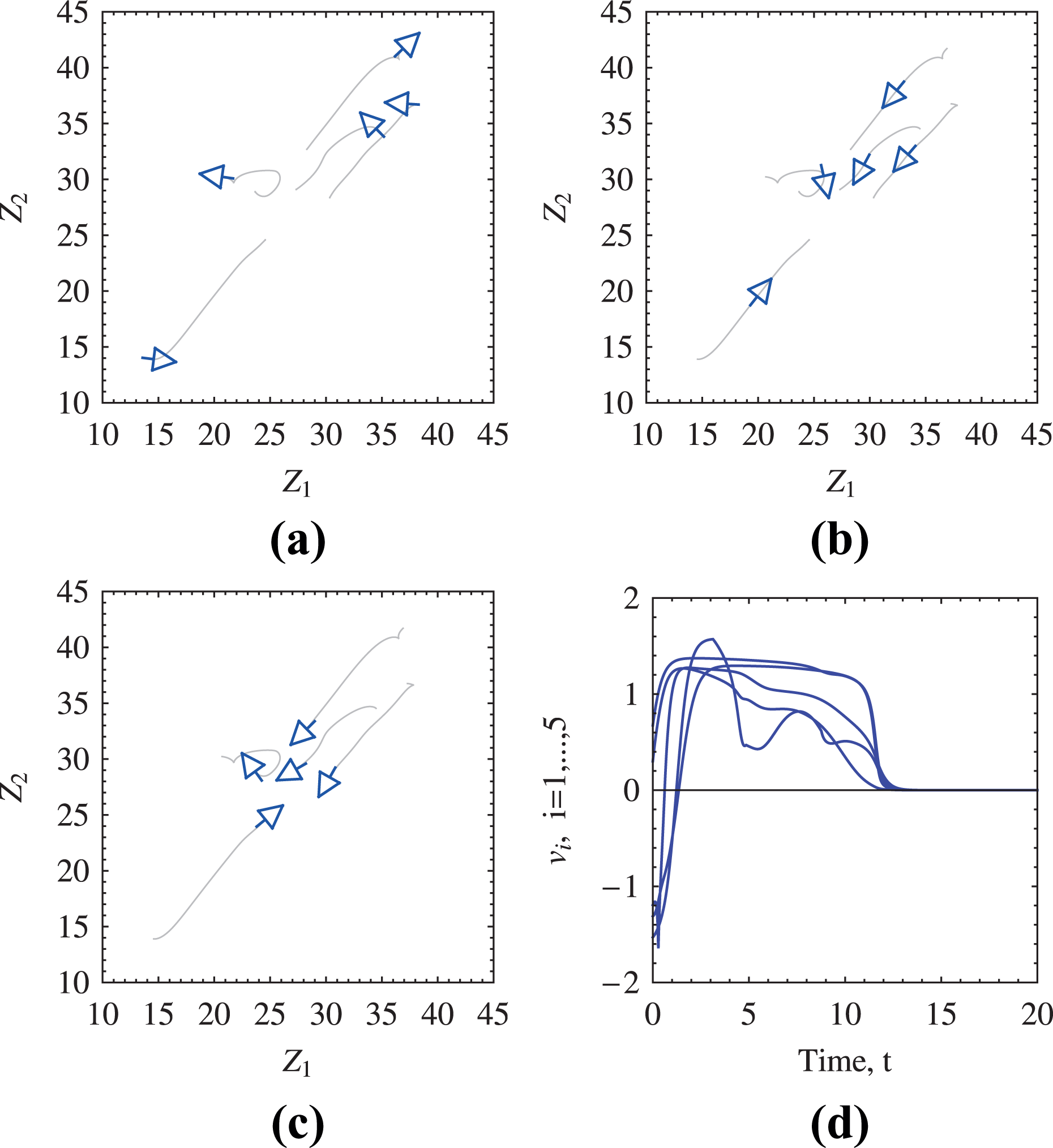
Example 9.1 (constant arrangement about a stationary centroid)
The parameters, for all , are and . The emergent pattern is a stationary arrangement about the centroid (Figure 6).
(a) Randomized initial positions and orientations of five vehicles. (b) At , the vehicles are seen converging toward the centroid. We see that the top-most vehicle and the second vehicle from the left have to reverse to align correctly. (c) By , the vehicles are stationary. Their trajectories are shown as lighter lines. (d) The instantaneous translational velocities eventually become zero, and, as expected, for all and .
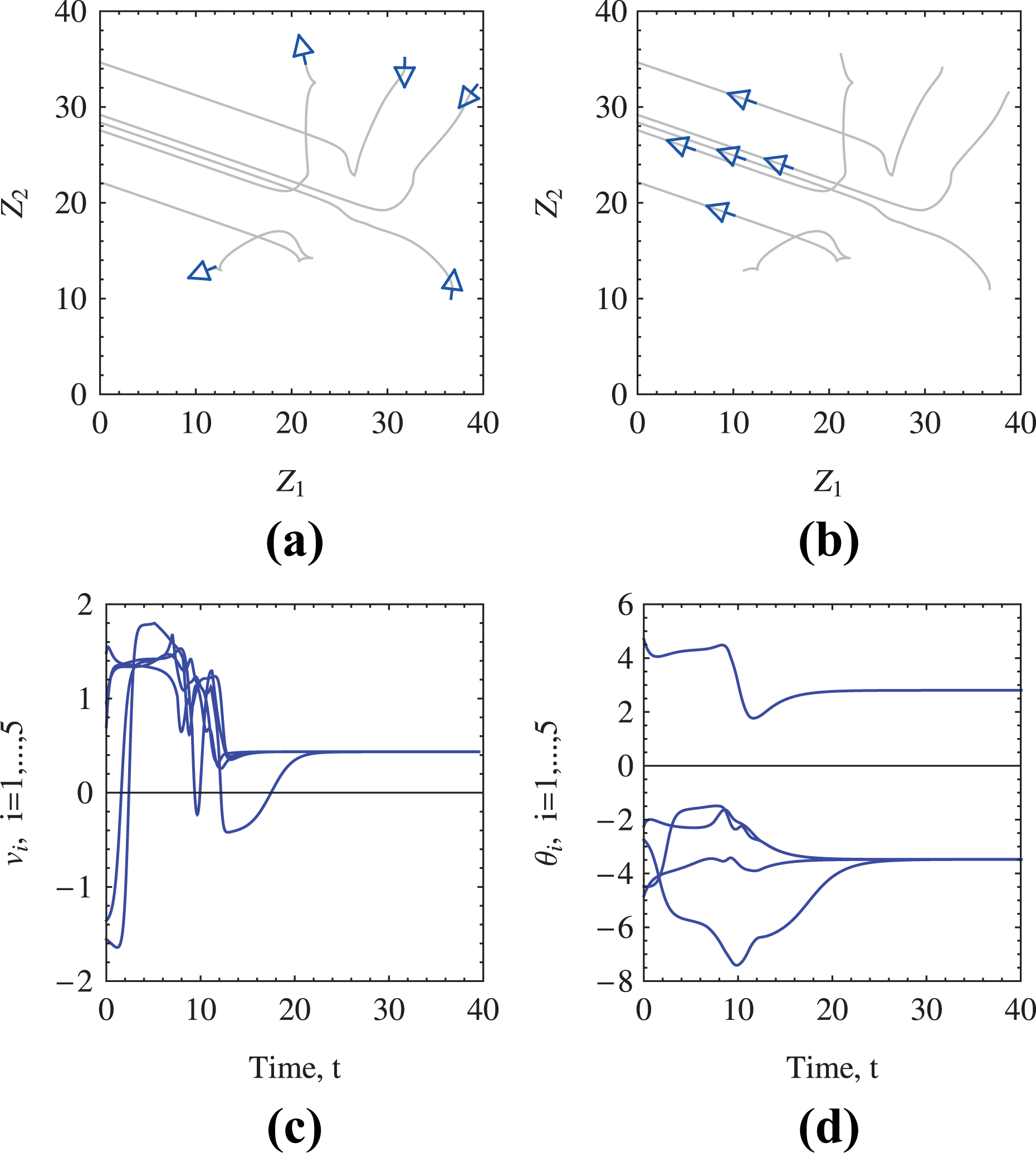
Example 9.2 (highly parallel formation)
In this example, the parameters, for all , are γi randomized between and including 1 and 2, and . The emergent pattern is a parallel formation wherein the distances between the vehicles eventually stabilize over time (Figure 7).
(a) Randomized initial positions and orientations of five vehicles. (b) By time , the vehicles are seen in parallel formation. Their trajectories are shown in gray. (c) The instantaneous translational velocities converge to a common velocity, with . (d) The angles θi of the vehicles stabilize with time.
Conclusion
In individual-based or Lagrangian swarm models governed by systems of first-order ordinary differential equations, the global existence and uniqueness of solutions, and the boundedness of solutions about the centroid of the swarm, are important properties. They ensure that the swarm model is cohesive and well-spaced.
This article developed a Lagrangian swarm model on the hypothesis that animal swarming is an interplay between long-range attraction and short-range repulsion between the individuals in the swarm. It treated both cohesive and well-spaced notions in a rigorous manner. The existence, uniqueness, and boundedness of solutions about the centroid were established via a Lyapunov-like function with attractive and repulsive components.
Extensive simulations suggested that the proposed artificial Lagrangian swarm model was sufficiently general to induce several stable patterns recognized as outcomes of collective behavior or self-organization. These are (a) constant arrangements about a stationary centroid, (b) parallel formations, (c) circular or oscillatory formations about a fixed point, and (d) random walks. To the author’s knowledge, such generality is not seen in other similar Lagrangian swarm models including the most recent one proposed in Li.18 The different types of emergent patterns arise by varying the system parameters.
This article, therefore, has provided a means to develop a generalized swarm model that could be used in engineering applications that seek to induce cooperation and pattern formation among multiple autonomous robotic agents.
Footnotes
Acknowledgements
The author would like to sincerely thank the editors and the anonymous reviewers for their suggestions that led to an improvement in the presentation of the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Jito Vanualailai
References
1.
OhKKParkMCAhnHS. A survey of multi-agent formation control. Automatica2015; 53: 424–440.
2.
ChenYQWangZ. Formation control: a review and a new consideration. In: 2005 IEEE/RSJ international conference on intelligent robots and systems, Edmonton, Alta., Canada, 2–6 August 2005, pp. 3181–3186. IEEE.
3.
SavkinAVWangCBaranzadehA, et al.Distributed formation building algorithms for groups of wheeled mobile robots. Robot Auton Syst2016; 75:463–474.
4.
SoniAHuH. Formation control for a fleet of autonomous ground vehicles: a survey. Robotics2018; 7: 67.
5.
CamazineSDeneubourgJLFranksNR, et al.Self-organization in biological systems. Princeton: Princeton University Press, 2003.
6.
GaziVPassinoK. Stability analysis of social foraging swarms. IEEE Trans Syst Man Cybern B Cybern2004; 34(1): 539–557.
7.
MerrifieldAJ. An investigation of mathematical models for animal group movement, using classical and statistical approaches. PhD Thesis, University of Sydney, NSW, Australia, August2006.
8.
JuanicoDEO. Self-organized pattern formation in a diverse attraction-repulsive swarm. FPL2009; 86: 48004.
9.
SozinovaOJiangYAlberM. A three-dimensional model of myxobacterial fruiting-body formation. Proc Natl Acad Sci2006; 103(46): 17255–17259.
10.
HarveyCWDuHXuZ, et al.Interconnected cavernous structure of bacterial fruiting bodies. PLoS Comput Biol2012; 8(12): e1002850.
11.
CouzinIDFranksNR. Self-organized lane formation and optimized traffic flow in army ants. Proc R Soc Lond B Biol Sci2003; 270(1511): 139–146.
12.
PernaAGranovskiyBGarnierS, et al.Individual rules for trail pattern formation in Argentine ants (Linepithema humile). PLoS Comput Biol2012; 8(7): e10052592.
13.
TunstrømKKatzYIoannouCC, et al.Collective states, multistability and transitional behaviour in schooling fish. PLoS Comput Biol2013; 9(2): e1002915.
14.
MajkutJD. Foraging fruit flies: Lagrangian and Eulerian descriptions of insect swarming. Master’s Thesis, Harvey Mudd College, Claremont, California, May2006.
15.
CoppolaMGuoJGillEKA, et al.Provable emergent pattern formation by a swarm of anonymous, homogeneous, non-communicating, reactive robots with limited relative sensing and no global knowledge or positioning. CoRR2018. arXiv/180.06827 [cs.RO].
16.
MogilnerAEdelstein-KeshetLBentL, et al.Mutual interactions, potentials, and individual distance in a social aggregation. J Math Biol2003; 47: 353–389.
17.
CarrilloJFornasierMToscaniG, et al.Particle, kinetic, and hydrodynamic models of swarming. Mathematical modeling of collective behavior in socio-economic and life sciences. In: NaldiGPareschiLToscaniG (eds) Modeling and simulation in science, engineering and technology. Boston: Birkhäuser, 2010, pp. 297–336.
18.
LiCH. Stability analysis of a swarm model with rooted leadership. Phys Lett A2019; 33(1): 1–9.
19.
CzirókAVicsekMVicsekT. Collective motion of organisms in three dimensions. Phys A1999; 264(1–2): 299–304.
20.
SenguptaSBasakSPetersRA. Particle swarm optimization: a survey of historical and recent developments with hybridization perspectives. Machine Learning and Knowledge Extraction2019; 1(1): 157–191.
21.
KumarSAVanualailaiJSharmaB. Lyapunov functions for a planar swarm model with application to nonholonomic planar vehicles. In: 2015 IEEE conference on control applications (CCA), Sydney, NSW, Australia, 21–23 September 2015, pp. 1919–1924. IEEE.
22.
DeviAVanualailaiJKumarSA, et al.A cohesive and well-spaced swarm with application to unmanned aerial vehicles. In: Proceedings of the 2017 international conference on unmanned aircraft systems, Miami, FL, USA, 13–16 June 2017, pp. 698–705. IEEE.
23.
LemmonMSunY. Cohesive swarming under consensus. In: 2006 45th IEEE conference on decision and control, San Diego, CA, USA, 13–15 December 2006, pp. 5091–5096. IEEE.
24.
ReynoldsCW. Flocks, herds, and schools: a distributed behavioral model. In: Proceedings of the 14th annual conference on computer graphics and interactive techniques, Anaheim, CA, July 1987, pp. 25–34. NY, USA: ACM.
YoshizawaT. Stability theory by Lyapunov’s second method. Tokyo: The Mathematical Society of Japan, 1966.
27.
CouzinIDKrauseJJamesR, et al.Collective memory and spatial sorting in animal groups. J Theor Biol2002; 218: 1–11.
28.
LiuBChuTWangL. Collective motion in non-reciprocal swarms. J Control Theory Appl2009; 7(2): 105–111.
29.
XueZZengJFengC, et al.Flocking motion, obstacle avoidance and formation control of range limit perceived groups based on swarm intelligence strategy. J Softw2011; 6(8): 1594–1602.
30.
VanualailaiJSharmaBNakagiriS. An asymptotically stable collision-avoidance system. International Journal of Non-Linear Mechanics2008; 43: 925–932.
31.
PappasGJKyriakopoulosKJ. Stabilization of non-holonomic vehicle under kinematic constraints. Int J Control1995; 61(4): 933–947.