
Abstract
This article presents the verification problem of estimating boat hull damping parameters using the computational fluid dynamics technique. In addition, a Lyapunov-based path control system will be introduced to centify the estimation result. The controller should satisfy the following features: firstly, maintaining that the boat dynamic model which includes path, velocity, and orientation errors are asymptotically stable; secondly, ensuring the actuation is operating normally under the nonlinear hydrodynamic system and actual environment limitation; thirdly, working with the anti-disturbance algorithm which includes a projection update law. The final part of the article introduces the procedure proving that the computational fluid dynamics simulation result and Lyapunov direct method controller are acceptable for the ocean boat nonlinear dynamic system. It is confirmed that the control system simulation can improve computational fluid dynamics technology instead of an actual experiment. It can solve the estimation problem caused by limitations in equipment or funds.
Keywords
Introduction
Ocean boat hull hydrodynamic parameters are usually estimated by towing tank, a kind of huge and expensive equipment. A towing tank had lots of requirements in terms of electrical power or working space. 1 Therefore, hydrodynamic testing experiments are usually done by computer-based simulation technique named computational fluid dynamics (CFD) instead of actual equipments. The ocean ship hydrodynamic CFD simulation technology in development for many years. One of the most famous CFD experiments was done by the US Navy. The simulation target was a warship named DTMB5415. 2,3 During the research process, a finite elements analysis technique was used to estimate the nonlinear damping coefficients. After a boundary micro-meshing process, the hydro-force between the ship’s hull and the ocean was able to be simulated by ANSYS software. The final result denoted that ship “cut” ocean water inordinately at different speeds. The damping parameters were also simulated by micro-meshed parts on the ship’s hull boundary. There are also some similar methods and experiments mentioned in the study by Banks et al. 4 and Brennen. 5 However, there was a problem with CFD simulation—that the results cannot been certified effectively until compared with an actual experiment. In this article, the certification research was based on a nonlinear control system. In other words, if the ship controller worked properly, the CFD simulation produced a successful result.
For driving unmanned surface vehicles (USV), there were many suitable control algorithms such as Proportional–Integral–Derivative (PID), Linear-Quadratic Regulator (LQR), and Backstepping. 6 –8 As usual, PID controllers were widely used in vessels’ control systems. There are many papers about the application of PID controller to vessels, such as a ship control model with two multilayer neural networks hydrodynamic estimator 9 and a patrol vessel heading control system. 10 The LQR controller is an automated way of finding an appropriate state-feedback controller; for example, an ocean submarine control system 11 that solved the time delay problem. Backstepping is a recursive process terminated when its subsystems are built from an irreducible stabilized system. Such as a torpedo MIMO backstepping control system 12 to track a trajectory generated by a way-point guidance system. In the case of autonomous underwater vehicles (AUV) named INFANTE 13 –15 made by Instituto Superior Técnico, Lisbon, Portugal, a new methodology was proposed for the design of path following systems. A nonlinear control strategy achieved global convergence to reference paths by taking explicitly into account the dynamics of the vehicle. 16,17 In another backstepping control project is about underactuated ship models 18 which includes two propellers without sway force.
This study was conducted to solve the CFD estimation effectiveness problem. The solution involves Lyapunov direct method and backstepping controller. The research target was a unmanned surface vehicle (USV) named Q-boat which worked under ocean current turbulence. The mathematics symbols are introduced in the second section. In the third section, the ocean boat dynamic kinematic models are introduced in detail. Following on in the fourth section, the boat hydrodynamic parameters are simulated by CFD technique based on ANSYS software. 19 –21 However, the simulation results could not be substituted in the control system directly. It was necessary that analyzing the data efficiency and cancelling failure numbers before building up the mathematics model. In the fifth section, a nonlinear controller was introduced step by step in detail. For an actual ocean boat moving on a 2-D surface, a backstepping controller solved the unmanned aerial vehicle (UAV) autonomous model driving problem by the Lyapunov direct method. Generally speaking, the controller developing procedure is based on the three steps of position, velocity, and acceleration. It was a hard research topic about controlling an autonomous model, such as a hovercraft 22 and a quadrotor. 23 There were also disturbance estimation laws in each Lyapunov tentative step respectively. The methodology was based on geometry projection law, which was usually used on estimations of unknown parameters. 24 –27 The simulation result is exhibited in the sixth section. The position, velocity, and acceleration errors converged to equilibrium value, which showed that the controller was working properly. The disturbance estimation result also demonstrated that the projection update law was suitable for hydrodynamic model noise cancellation. Finally, in conclusion, the article presents that the effectiveness of boat hydrodynamic CFD estimation can be certificated by USV backstepping control system. Moreover, a future study project was introduced that a practical USV driving experiment based on Robot Operation System (ROS) and accurate global positioning system (GPS) navigation equipments.
Notation
In this article, the prime

A function
Examples of smooth saturation functions are
Ocean boat model
The boat’s coordinates
In this case, the experiment platform is a marine boat named Q-boat, which is specifically designed for test algorithm about ocean USV cooperation control and sea-bed scanning, as shown in Figure 1.

Q-boat testing in the ocean.
A boat model includes its statics and dynamics functions.
7,18,28
–31
According to professor Fossen’s classical ocean engineering textbook,
32
a ship model includes the motion in 6 degrees of freedom (DOF) which are named surge, sway, heave, roll, pitch, and yaw, as shown in Figure 2. The first three describe the position motion along
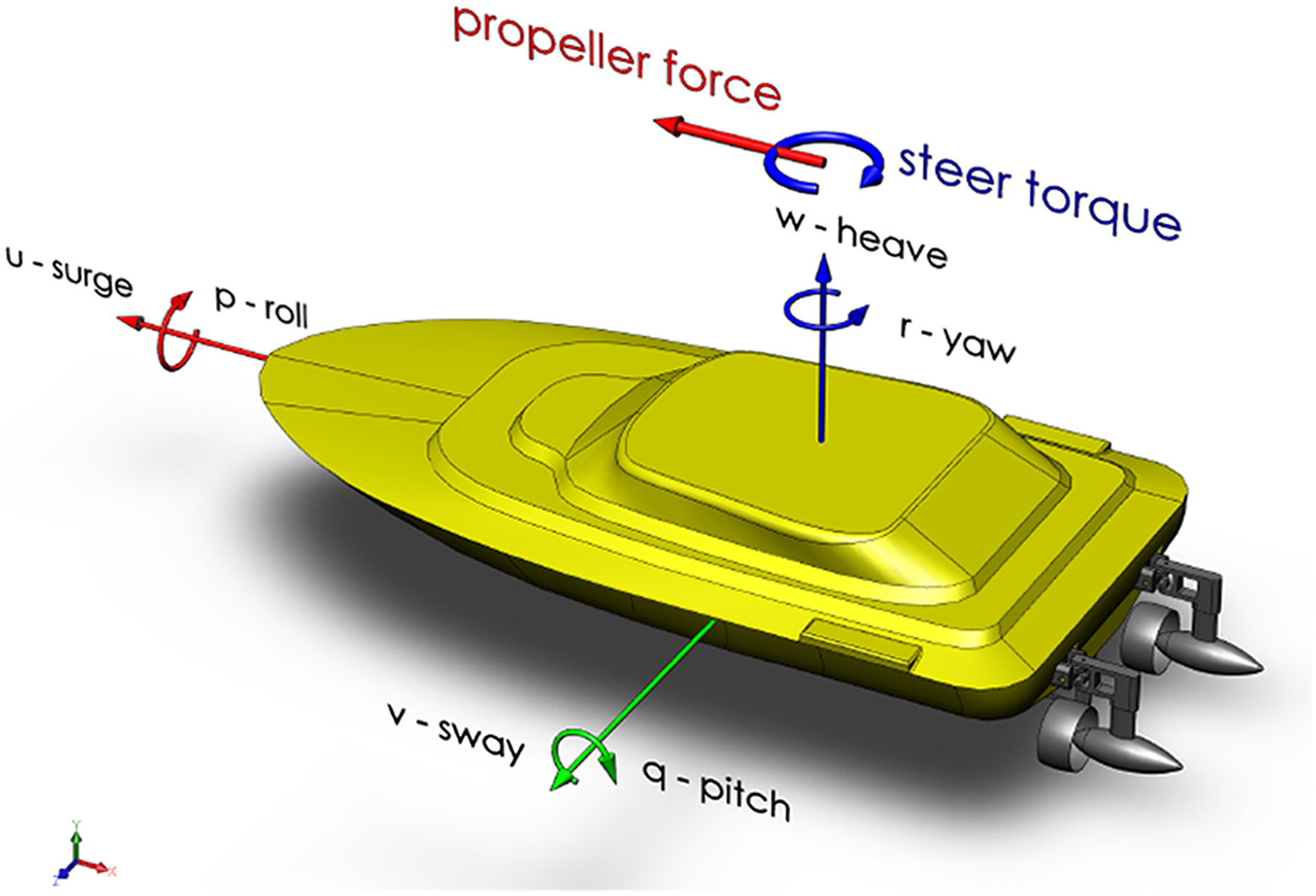
Q-boat coordinations.
Boat kinematics equations
For the boat model in this case, the heave, pitch, and roll modes which represent boat moving in the vertical plane are neglected. Therefore, the boat kinematics equations are


where
Boat dynamic equations
The boat dynamic equation of motion can be conveniently expressed as


where m is the mass scalar;
It is necessary for the model to simplified before higher-order calculation. Firstly, because a normal boat satisfies the following condition equation (5), the boat inertia moment

Secondly, based on boat kinematics equation (1) and dynamic equation (3), the boat acceleration is

where nonlinear damping part is a diagonal matrix. Each element includes the norm of the velocity, as follows

Finally, the error between actual and ideal acceleration is

where S is a sym-skew matrix as introduced before.
CFD estimation technology
Basic boat data
Based on the manual books,
19
–21
ANSYS is used to simulate nonlinear damping coefficients in the Q-boat case. Similar with methods in the literature,
1,4,5
the boat was firstly simplified as an uniform density ellipsoid. The boat’s mass is 25 kg, radius dimensions are
Added mass



and the mass of an ellipsoid is
CFD boat model in ANSYS
At the beginning, boat surface was covered by typical markers. Based on the marker’s refection, its position data can be captured by Vicon camera, as shown in Figure 3(a).

Vicon equipments: (a) Vicon camera and (b) Vicon screen.
Based on the position data, a boat hull’s 3-D model was built up by a Vicon system, as Figure 3(b). After cancelling failure data, the hull model was transferred to ANSYS software. Similar to the boat hull mesh model of the US Navy battleship No. DTMB5415, 2,3 the Q-boat experiment was designed as a boat testing in towing tank which was built by CFD software as shown in Figure 4. In addition, the model does not include the upper-water part, which leads to an unnecessary waste of calculation memory. Furthermore, the boat hull boundary was built by prism mesh which is helpful for simulating interactions between hull and water.

Digital towing tank and boat model.
In the ANSYS finite analysis, the boat body was assumed as fixed in towing tank. The simulation procedure was similar with a practical towing tank experiment as in Figure 4. The water flush into tank from boat head side (left part) and leave the tank at tail side (right part). After filtration of invalid data, CFD software generates the boat’s nonlinear damping parameters. In addition, to optimize calculation procedure, the simulation model only includes half the boat’s hull. Therefore, the calculation model only consists of half a towing tank and half a ship’s hull, as in Figure 5(a). Furthermore, the boat hull boundary was built by prism mesh which is helpful for simulating interactions between hull and water Figure 5(b).

ANSYS model optimization: (a) mesh model and (b) prism boundary.
Finally, the simulation result includes total resistance
Damping parameters simulation result.

Obviously, in same direction, the relationship between total resistance and velocity is nonlinear
Finite element analysis damping parameter simulation result.

Finally, the final damping parameter is a diagonal matrix as follows

where elements are as follows,
Finally, based on simulated damping parameters, the nonlinear controller would be finished in the following section.
Controller design
In this section, based on the double integrator system, a Lyapunov directed controller was built up firstly which is similar with the model in the study by Yu,
34
as shown in Figure 6. In addition, the integrator system was based on the ship’s path, orientation, and velocity errors, respectively. The objective of the controller is to drive a marine vessel following design path

Boat control loop.
Backstepping for position and velocity error
At first, position error


According to ship kinematics and dynamic equations (1) to (4), the time derivative of error


where the acceleration
The last function can be regarded as two closed-loop double integrator systems. Each system is driven by one of the vectors
In addition, based on a transferred function in Young’s inequality, the position part was reformed as
The first tentative Lyapunov function
Based on saturated position error

where

where
The thrust control law
Up to now, based on the first time derivative of Lyapunov function, the equilibrium of desired and actual acceleration is

where the rotation matrix is

After substituting equation (20) into equation (19), the desired acceleration was replaced in direction format as

In addition, the force equilibrium equation (19) includes actual


As a consequence, based on actual and desired direction error

In the following section, the calculations will focus on the next stage, direction error.
Backstepping for direction error
Firstly, the direction and orientation angle errors are


In addition, the second tentative Lyapunov function was extended with angular error as follows

Finally, the time derivative of second tentative Lyapunov function is

where
Backstepping for angular velocity
Angular velocity error
The second time derivative of Lyapunov function equation (28) relates to angular velocity

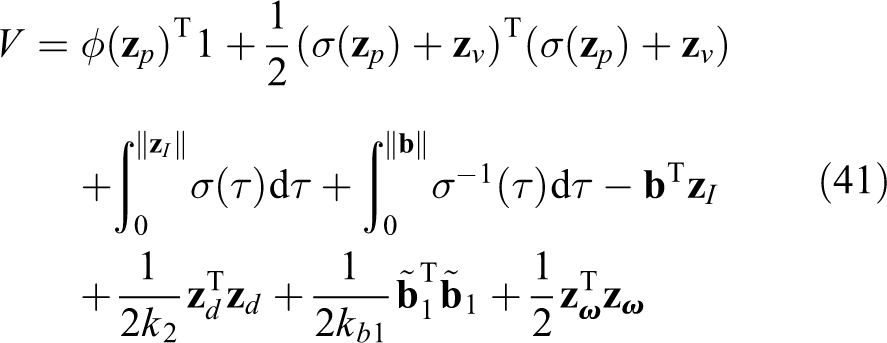
Final Lyapunov function
The final Lyapunov function is a relay on angular acceleration error as follows

Time derivative of the final Lyapunov function is

where
The symbol

In order to achieve global trajectory tracking and guarantee

where the time derivative of desired angular velocity is

Up to this step, all of the Lyaounov function calculations were finished. In following section, the disturbance estimation update law will be introduced in detail.
Estimation update law with smooth projection operator
The estimate update law is

with the following functions



where
Based on the estimation law, the final Lyapunov function was established.
Control law conclusion
Up to now, all the backstepping calculations have been finished. The final conclusion generated that the time derivative of Lyapunov function
If
Proof
Let the boat kinematics and dynamics be questions equations (1) to (4) respectively. Let


The controller achieves trajectory tracking by guaranteeing the errors
If any actual boats satisfy
and its time derivative computed as

which is a semi-negative definite function.
Finally, based on the positive definite V with respect to
Simulation result
Trajectory tracking performance
In order to simulate the proposed controller, the boat prediction route was set as a circle, with radius
Tracking performance with disturbance
Finally, the boat’s tracking performance with disturbance was presented in Figure 7. The boat followed a circular path with small position errors after a short time for adjustment. The adjustment time depended on disturbance, water fluid hydrodynamic and the ship’s shape characteristics.

Boat reference and actual path with disturbance.
Error performance
As Figure 8 shows, the position and velocity errors

The error simulation with disturbance.
Disturbance estimation
The unknown current disturbance was estimated by a smooth projection operator. As in Figure 9, the actual disturbance was assumed to be

The boat disturbance estimation results.
Conclusion
The article introduces the methodology of CFD simulation result certificated by USV trajectory tracking control system. The trajectory tracking performance works with unknown disturbance. As an actual condition, a boat’s hydrodynamic parameters are about nonlinear damping and centripetal force. In general, the tracking controller is based on Lyapunov direct method and backstepping techniques. The final simulation results denotes that the trajectory tracking errors converge to a bounded equilibrium. This means that the controller works wonderfully under ocean current disturbance. In addition, it proves that the CFD simulation result is proper for boat hydrodynamics. As an innovation point, the simulation method will be of use to some small laboratory without large experiment equipment. CFD technology can solve the problems caused by equipment or limited funds. However, there are still disadvantages. The actual Q-boat experiments have not been finished because of changes in research schedule. This means that there is lack of actual data to compare with the estimation result. In future, the Q-boat will upgrade with ROS and accurate GPS navigation equipment. Some related experiements will take into consideration such things as multi-boat formation control, boat-submarine leader following control and sea-bed communication control with time delay.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this article was partially supported by FDCT funding support project, Macau, China (Project Code: 0027/2018/ASC and 166/2017/A), Education innovation project, Beijing Normal University Zhuhai, China (Project Code: 201708), Teacher academic ability enhancement project, Beijing Normal University Zhuhai, China (Project Code: 201850012).