
Abstract
An adaptive fuzzy sliding mode controller is proposed for the depth control of an underactuated underwater vehicle based on the state-dependent Riccati equation. An adaptive fuzzy control algorithm is embedded into the sliding mode controller to solve the buffering and mismatched uncertain problems in the robust sliding mode variable structure controller, where an auxiliary fuzzy control unit is designed to automatically adjust the scale factor of the main fuzzy controller output. Based on Lyapunov stability theory and final value bounded theorem, the stability and convergence properties of the closed-loop system are demonstrated. Numerical simulations are carried out to validate the effectiveness of the proposed controller.
Keywords
Introduction
Autonomous underwater vehicles (AUVs) have been widely used to explore ocean resources. These vehicles usually contain several critical devices to overcome hazardous underwater environment and to accomplish challenging tasks required for those vehicles. However, the effective controller of underwater vehicle continues to pose great challenges to system designers in the controller due to the system’s highly nonlinear, time-varying, dynamic behaviors and uncertainties in hydrodynamic coefficients and external disturbances. The dependence of the dynamic model on the uncertain underwater environment also makes the precise control of the AUV depth more challenging. Control strategies with intelligence, adaptive capability, fast convergence, and robustness are also required.
It has already been shown 1,2 that, in the case of underwater vehicles, the traditional control methodologies are not the most suitable choice and cannot guarantee the required tracking performance. On the other hand, sliding mode control, due to its attractiveness such as robustness to parametric uncertainty, insensitivity to unknown disturbances, fast dynamic response, order reduction, easier implementation, and design simplification, has proven to be a very attractive approach to cope with these problems. However, the practical application of sliding mode controller (SMC) is limited by the lack of knowledge on the uncertainties of the dynamic model, including plant uncertainties and external disturbance. Many adaptive fuzzy control schemes 3 –9 involving linguistic fuzzy information from human experts have been effectively integrated into SMC to circumvent the problem of uncertainties for robot. For instance, Lakhekar and Waghmare 3 developed an adaptive fuzzy proportional integral (PI) SMC for trajectory tracking control of AUV to achieve high precise maneuvering. Ma et al. 4 designed an adaptive sliding mode dynamical surface controller for a hybrid unmanned aerial underwater vehicles. Sarfraz et al. 5 presented a robust stabilizing controller via adaptive integral sliding mode for nonholonomic systems with uncertainties. Zhang et al. 6 proposed an adaptive quasi-sliding mode control method for the path following system of an underactuated unmanned underwater vehicle. Bessa et al. 7 presented an adaptive fuzzy sliding mode controller (AFSMC) for remotely operated underwater vehicles. Yang et al. 8 propose a sliding mode control law for asymptotically stabilizing a nonholonomic mobile robot to a desired trajectory. Savkin and Wang 9 presented a biologically inspired strategy for the navigation of a unicycle-like robot toward a target while avoiding collisions with moving obstacles. Although the aforementioned SMCs have been used to reduce the effects of unknown uncertainties on the control performances, those unknown uncertainties must be located exactly on the position of control output vector or in the intermediate variable in the state space equation. Such limitation on the position of the nonlinear uncertain function is usually known as the strict match condition. Unless an uncertain system satisfies the strict match condition, these aforementioned SMCs cannot be used to achieve their desired control performances for the underwater vehicle. Only few investigations 10,11 have been conducted on the design of an SMC with loosen constraints on the position of the mismatched uncertainties.
Varieties of neural networks and proportional differentials coupled with the SMC have been used to address the chattering problem in the general SMC. Chatchanayuenyong et al. 12 proposed a neural network-based time optimal SMC to determine the solution of the nonlinear curve. However, the tuning of neuron weights requires a large quantity of experimental datum. Wang et al. 13 designed an SMC that has multivariable output feedback adaptive terminal. Although the convergence of the closed loop system is achieved using Lyapunov stability theory, some tracking errors are not bounded within a small tolerance region. Ouyang et al. 14 developed a proportional differential plus SMC to compensate for the uncertainties. However, the controller is not robust enough in terms of the proportional–derivative (PD) control gain. Many fuzzy control schemes involving linguistic fuzzy information from human experts were also integrated into the SMC to circumvent the chattering problem. For instance, Chen and Zhang 15 applied an adaptive fuzzy sliding mode control algorithm to resolve the system chattering problem. Aloui et al. 16 designed an AFSMC with an adaptive PI term to minimize the chattering phenomenon. Lakhekar et al. 17 proposed two types of fuzzy approximations to cope with chattering problem. Lakhekar et al. 18 introduced two types of fuzzy self-turning techniques to eliminate the effects of chattering. Amer et al. 19 developed a reduced rule-based fuzzy proportional integral SMC to eliminate chattering. Esfahani et al. 20 designed an AFSMC to address the problems of chattering under the condition of lacking training data and non-robust tracking errors.
In this article, an AFSMC is proposed for the depth control of an underactuated underwater vehicle based on the state-dependent Riccati equation. An adaptive fuzzy control algorithm is embedded into the SMC to solve the buffering and mismatched uncertain problems in the robust sliding mode variable structure controller, where an auxiliary fuzzy control unit is designed to automatically adjust the scale factor of the main fuzzy controller output. Based on Lyapunov stability theory and final value bounded theorem, the stability and convergence properties of the closed-loop system are demonstrated. Numerical simulations are carried out to validate the effectiveness of the proposed controller.
This article is organized as follows. In the second section, the nominal model and uncertainty model of an underwater vehicle are formulated. In the third section, an adaptive fuzzy robust SMC is designed along with the assessment in its convergence. In the fourth section, the numerical simulation results are presented and discussed. Conclusion is given in the fifth section.
Dynamic modeling of underwater vehicle
Modeling
The Remote Environmental Unit (REMUS) AUV 21 and its corresponding reference frames are illustrated in Figure 1. The inertial reference frame is considered a fixed frame, whose z-axis directed into the gravitational direction and the other two axes are perpendicular to the z-axis. In contrast, the body reference frame is set at the geometric center of the underwater vehicle. The longitudinal u-axis directed into the direction from the tail to the nose, and the vertical w-axis is along the direction from the top to the bottom. The underwater vehicle is assumed a rigid body with a symmetrical longitudinal plane.
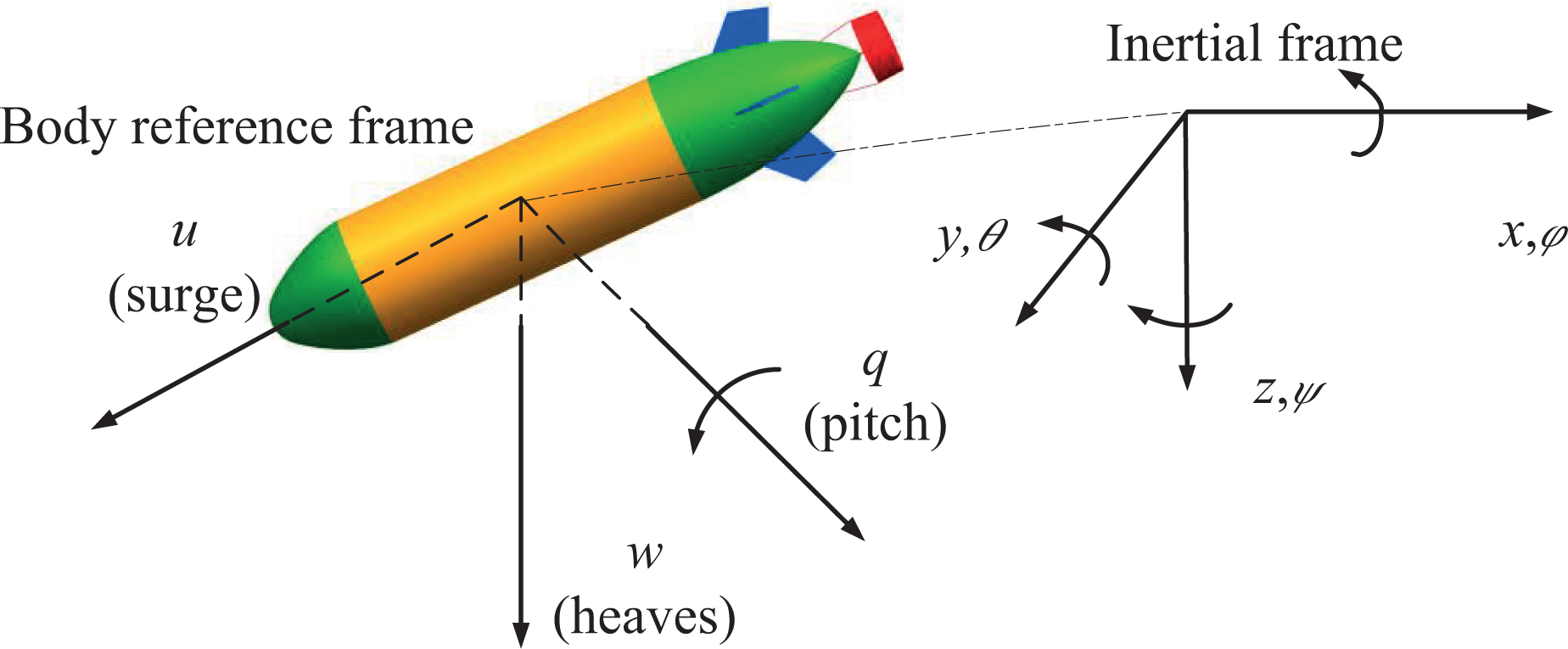
Schematic of REMUS underwater vehicle. REMUS: remote environmental unit.
The nonlinear dynamic model of a 3-DOF underactuated underwater vehicle in the inertial frame can be written in the following uniform matrix form

and its kinematic models in the vertical plane related to the inertial frame with the body frame are expressed as follows

where w, q, z, and θ represent the heave velocity, the pith velocity, the depth variable, the pith angle, respectively; δs
denotes the control fin angle; [xB, yB, zB
]T is the vector representing the coordinates of the buoyancy center; [xG, yG, zG
]T is the vector representing the coordinate of the center of gravity of the vehicle; Iyy
denotes the moment of inertia of the vehicle about the pitch axis; u is the longitudinal velocity;
Given the state variable of x = [w, q, θ, z]T, equation (2) can be simplified as the following compact form by ignoring the sufficiently small second-order viscous damping coefficient

where d denotes the unmodeled dynamics and external interference and it is a matrix of four rows and one column; the matrix A is equal with
When those unmodeled dynamics and external interference are neglected, the nominal dynamic model of equation (3) can be expressed as

When the two uncertainties associated with system matrix and input matrix are considered in the kinematic model, the nonlinear dynamic model of equation (4) with uncertainty terms can be rewritten in the following form

where a(t) denotes an uncertainty vector associated with the system matrix; b(t) represents an uncertainty vector associated with the input matrix; and n(t) is an unmodeled dynamics and external interference, which is matched disturbance.
Orthogonal transformation of dynamic model
Equation (5) can be transformed into the block matrix form using the linear transformation

where M denotes the transformation matrix. After transformation, equation (5) becomes

where
Assumption 1
These vectors of parameter uncertainty, input uncertainty, and interference uncertainty are bounded. The uncertainty parameters in equation (7) take the form of ΔA 11=A 12 l 11, ΔA 12 = A 12 D 1, N 1= A 12 E 1, 2A 21 = B 2 l 21, 1A 22 = B 2 l 22, ΔB 2 = B 2 D 2, and N 2=B2 E 2. These bounded values of the matrix parameters are used to represent the uncertainty.
Substituting those uncertain parameters in Assumption 1 into equation (7) yields

where
Controller design
Sliding mode controller
A variable structure robust controller is proposed to control the unmatched uncertainty linear system defined in equation (5). Let s(t) be a sliding surface defined by equation s(

where C
1 is calculated by equation |λI + (A
11 − A
12
C
1)| = 0; C
2 is an identity matrix and s(
Taking the time derivative of the sliding mode surface in equation (9) and then substituting equation (8) into the result of the time derivative of the sliding mode surface in equation (9) yield
where K = A 22 + C 1 A 12, L = A 12 − A 22 C 1 + C 1 H, H = A 11 − A 12 C 1.
The robust SMC is designed as the following combinational parts of the equivalent control law and continue robust control law

and the equivalent control law in the SMC is designed as

where K* is located in the negative side of the half plane on the complex plane. Substituting equation (12) into equation (10) yields

where
A continue robust control law in the SMC is defined as

where

Theorem 1. 22
For system
Then, the terminal value of the system is globally bounded as t→∞

where
Theorem 2
Given that the dynamic model defined in equation (5) satisfies Assumption 1, the sliding mode control laws in equations (12) and (14), and the Riccati-like equation in equation (15) guarantee the global stability of the closed-loop system.
Proof
Now, the following Lyapunov function is defined

Taking the time derivative of V(t), and substituting the equation (13) into the time derivative yields

Let

By using Assumption 1, equation (19) becomes

Substituting the η
3 in equation (13) into

Since

Substituting equations (20) and (22) into equation (18) results in

Substituting equation (15) into equation (23) yields

Since

From the equation (25), the second property in Theorem 1 can then be obtained as
Adaptive fuzzy sliding mode controller
To improve the control performances, an adaptive fuzzy algorithm is employed to reduce the chattering issues. Figure 2 illustrates the principle of adaptive SMC.

Block diagram of the AFSMC. AFSMC: adaptive fuzzy sliding mode controller.
As shown in Figure 2, the AFSMC is composed of a continuous robust control law of u cr and an equivalent control law of u eq. The adaptive fuzzy controller consists of two components: a main fuzzy controller component and an auxiliary fuzzy controller component. The knowledge base for the main fuzzy controller component contains a collection of fuzzy if–then rules with the following form (Rj ): If x 1 is as A 1j and x 2 is as A 2j , then y is as Bj (j = 1, 2,…1 n), where xi (i = 1, 2) are input parameters of the main fuzzy control component; y is the output parameter of the main fuzzy control component; fuzzy sets Aij and Bj are associated with the membership functions μAij (xi ) and μBj (y), respectively, and n is the number of fuzzy rules. The input membership function is defined as the following triangular and trapezoidal hybrid function

where aij , bij , and cij are fuzzy segmentation points. The output membership function is defined as the triangular membership function. The output parameter value of the main fuzzy control component with a weighted-center defuzzifier and a singleton fuzzifier can be expressed as follows

where

where
The two input parameters of x
1 and x
2 in the main fuzzy control component are k
1
s(t) and

Fuzzy control row set in the main fuzzy control component.

Adaptive fuzzy control row set in the auxiliary fuzzy control component.

The membership functions input parameters and output parameters of the adaptive fuzzy control are shown in Figures 3 and 4.

Membership functions of fuzzy input and output parameters in the main fuzzy control law: (a) the input variable s and

Membership functions in the auxiliary control law: (a) the input variables s and
Simulation results and discussions
A 3-DOF REMUS underactuated underwater vehicle is taken as an example to examine the depth control ability of the above proposed AFSMC. The objective of the simulations is to examine the ability of the proposed controller in the depth control by forcing the proposed controller to track a desired depth at z
r = 0 m. The weight of the underwater vehicle is calculated as W = mg = 299 N with m = 30.48 kg, g = 9.81 m/s2, and its buoyancy force B
0 = 306 N. The center of gravity is defined as [xG
, yG
, zG
]T = [0 m, 0 m, 0 m]T, and the center of buoyancy is defined as [xB
, yB
, zB
]T = [0 m, 0 m, 0 m]T, the inertia moment of the vehicle about the pitch axis
The start and desired depths in the simulation case are given as z
0 = 2 m and zr = 0 m, respectively. The initial states set as w
0 = 0.02 m/s, q
0 = 0.04 rad/s, θ
0 = 0.1 rad, z
0 = 2 m. These uncertainty parameters in equation (7) take the following values:
Case 1. The SMC in equation (11) is applied in the nominal system and uncertain model for the 3-DOF REMUS AUV. Its control law is defined as follows
Under the control action of SMC, the depth control performance of the SMC is illustrated in Figure 5. It can be observed from Figure 5 that the SMC performs much better and more satisfactory in the nominal system than in uncertain model. As observed from Figure 5, it takes about 15 s from the initial state to the desired depth position. However, a large steady-state error exists for the control of systems with parameter uncertainties and external disturbances. Therefore, some additional appropriate compensation control schemes and chattering elimination method need to be developed and incorporated in the SMC to minimize the impact of uncertainties on the depth control performances.

Depth control performances when the SMC is applied in the nominal system and uncertainty dynamic model: (a) depth position; (b) sliding mode surface; (c) control action. SMC: sliding mode controller.
Case 2. An AFSMC is designed to minimize the impact of uncertainties on the depth control performances for the 3-DOF REMUS AUV. Its control law is expressed as follows

In the main fuzzy controller component, the triangular membership functions with the central values {−2; −0.5; −0.33; −0.08; 0; 0.08; 0.33; 0.5; 2} are adopted for the two input parameters k
1
s(t) and k
2
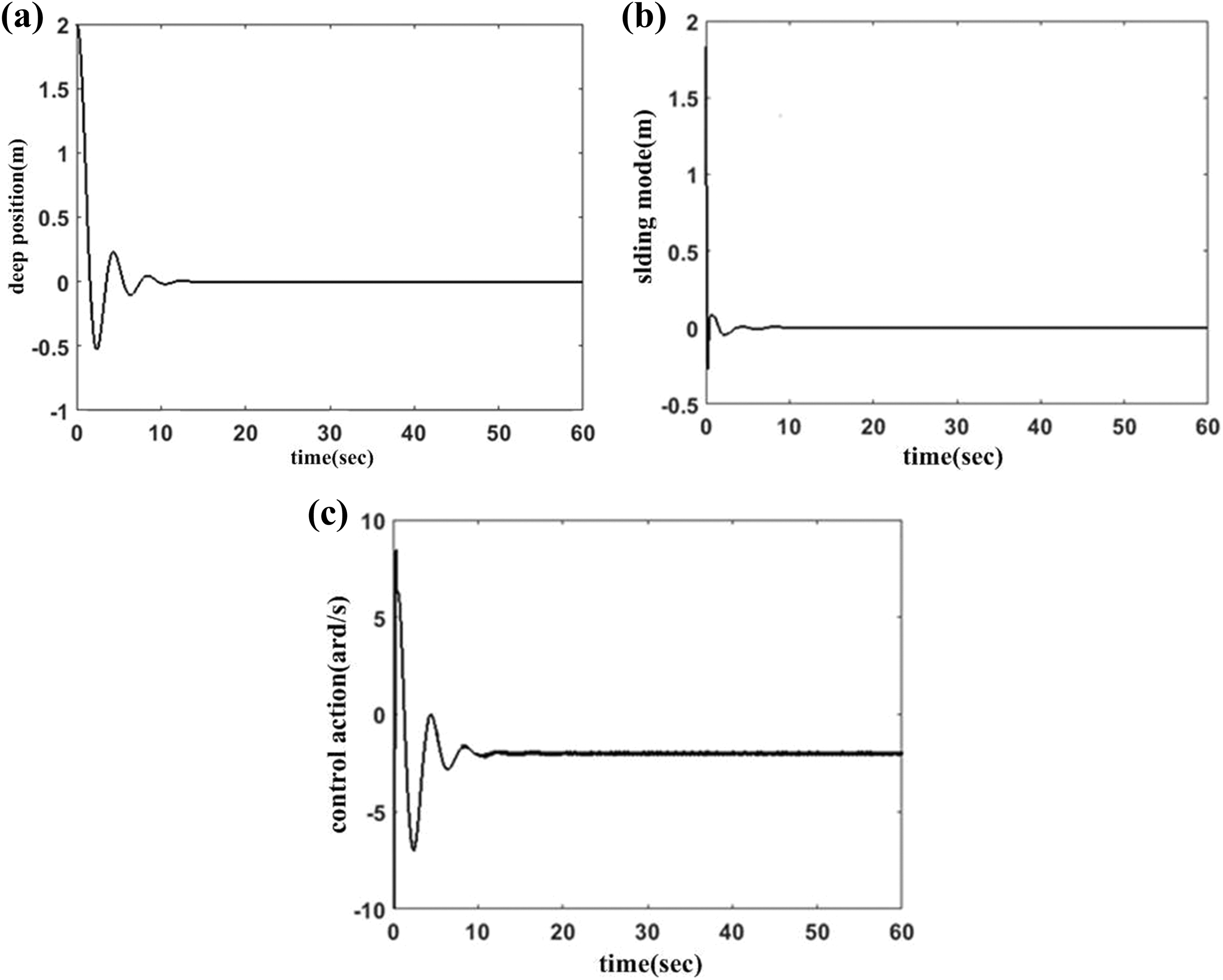
Depth control performances for AFSMC: (a) depth position; (b) sliding mode surface; (c) control action. AFSMC: adaptive fuzzy sliding mode controller.
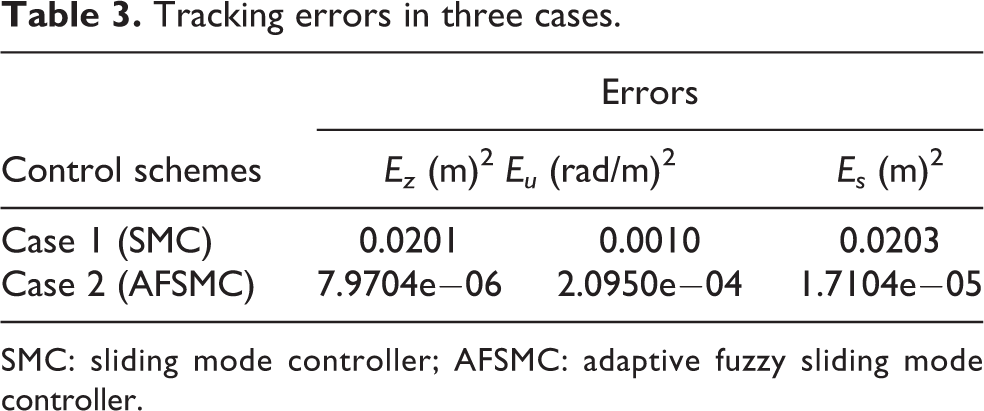
Some comparative studies were also conducted between the SMC and the proposed AFSMC. The desired trajectories tracked by the two control algorithms are the same as those in the mentioned simulation cases. For the convenience of comparisons, the depth, the control action, and sliding mode surface tracking errors in those cases are calculated by the following tracking error equations over one training cycle of a trajectory

where Ez
, Eu
, and Es
represent the depth tracking error, the control action error, and the sliding mode surface error, respectively; N denotes the element number of the depth vector;
Tracking errors in three cases.
SMC: sliding mode controller; AFSMC: adaptive fuzzy sliding mode controller.
Conclusions
In this article, an AFSMC was proposed to deal with the depth control of an underactuated underwater vehicle based on the state-dependent Riccati equation. An adaptive fuzzy control algorithm is embedded into the SMC to reduce the static error in the transient and steady states in the existence of unknown system parameters and external disturbances. The adaptive fuzzy control algorithm is composed of a main fuzzy controller component and an auxiliary fuzzy controller component, where an auxiliary fuzzy control unit is designed to automatically adjust the scale factor of the main fuzzy controller output. Moreover, the stability and convergence properties of the closed-loop system are demonstrated using Lyapunov stability theory and final value bounded theorem. Numerical simulation results have clearly demonstrated that the proposed AFSMC is superior over the SMC in improving the dynamic and static performances of the entire control system including the errors reduction, rapid convergence, and chattering elimination.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Major Scientific and Technological Innovation Project of Shandong Province with Grant No. 2017CXGC0923 and Key Research and Development Program of Shandong Province Grant Nos. 2017GGX30112 and 2018GGX103025.