
Abstract
Based on model-free adaptive control theory, the heading control problem of unmanned surface vessels under uncertain influence is explored. Firstly, the problems of compact form dynamic linearization model-free adaptive control method applied to unmanned surface vessel heading control are analyzed. Secondly, by introducing proportional control and variable integral separation factor, an variable integral separation model-free adaptive control algorithm with proportional control is proposed. The introduction of proportional control and variable integral separation factor solves the problems of oscillation, instability, and integral saturation when rudder angle is controlled directly to control the heading of unmanned surface vessel with compact form dynamic linearization model-free adaptive control method. Finally, the effectiveness of the method is verified by the simulation and field experiments results of heading control with model perturbation and system time delay in unmanned surface vessel heading subsystem.
Keywords
Introduction
Unmanned surface vessels (USVs) are attracting growing attention from researchers at home and abroad because of their extensive applications in environmental monitoring, marine survey, and port guards, coordinating work with autonomous underwater vehicles. 1 However, USV has the characteristics of nonlinear, uncertainty, time-varying, and time-delay, besides, it is susceptible to environment interference. 2,3 Hence, it is meaningful to study the motion control problems of USV with uncertainties. Aiming at model perturbation and time delay of heading subsystem, the heading control of USV is studied in this article.
At present, many scholars have carried out relevant research work on USV heading control and the control methods are mainly focused on sliding mode control, 4,5 adaptive control, 6 proportion, integral and derivative (PID) control, 7,8 intelligent control, 9 –12 and so on. Miao et al. 13 by combining the expert control technology, S plane and PID control algorithms, an adaptive expert S-PID control algorithm was proposed for heading control of the micro-USV and field tests were conducted. However, the structure of the controller is complex, and the accurate acquisition of expert experience is difficult. Mu et al. 14 proposed an adaptive heading controller by trajectory linearization control technology, neural network minimum learning parameter method, disturbance observer and auxiliary design system, but the controller design needs precise mathematic models, which is very difficult in practice. Classic PID algorithm was used as the main heading control algorithm, and back-propagation neural network (BPNN) was also utilized to achieve more effective self-adaptive PID control. 15 At the same time, in order to improve the convergence speed and precision of BPNN, artificial bee colony algorithm was introduced to minimize the error of system and adjust the weight of BPNN. 16 However, BPNN structure selection is difficult to determine, generally based on experience, besides, BPNN has the problem of sample dependence: the approximation and generalization ability of network model is closely related to the typicality of learning samples, and it is difficult to select typical samples from the problem to form training set. Aiming at the problem of heading control of USV with variable mass and resistance, Wilhelm et al. 16 proposed a model reference adaptive backstepping method. Fan 17 proposed a fuzzy self-adaptive algorithm for USV heading control.
In the above method, the PID control algorithm has obtained the most extensive real ship application. However, USV is easily influenced by model perturbation and environmental disturbance force, which makes it difficult for the PID controller to maintain the consistent control performance; the parameters need to be adjusted again to stabilize the system. 17 It is difficult to establish accurate mathematical models of controlled systems, which makes it hard to achieve good control performance based on model-based control algorithms. 18 –20 Therefore, it needs a model-free controller with good robustness and strong adaptability for USV heading control.
In recent years, data-driven control algorithms have attracted much attention. 21 Model-free adaptive control (MFAC) is one of data-driven control methods proposed by Hou Zhonsheng for a class of general single input and single output (SISO) discrete time nonlinear systems. 22 It does not consider the actual mathematical model of USV, instead, the controller design is based on the system input and output (Input/Output, I/O) data. It has been widely used in traffic, oil, refining, chemical, and other industrial control fields 23 ; however, the research of this method in the field of motion control such as underwater vehicles and USV is relatively little, not to mention practical engineering application at present.
Based on compact form dynamic linearization model-free adaptive control (CFDL_MFAC) algorithm, this article discuss heading control problem of USV under uncertain influence. Firstly, the problems of CFDL_MFAC applied to USV heading control are analyzed. Secondly, introducing proportional control and variable integral separation factor solves the problems of oscillation, instability, and saturation when applying CFDL_MFAC method to USV heading control directly; finally, the robust and adaptive performance of the variable integral separation model-free adaptive control algorithm with proportional control (VIS_MFAC_PC) method is verified by the simulation and outfield experiments results of heading control with model perturbation and system time lag in USV heading subsystem.
Analysis of MFAC method and USV heading control application
Generally, SISO discrete time nonlinear systems can be expressed as 23

where
The following assumptions are made for system (1):
Assumption 1
Except for finite moments, the partial derivatives of the
Assumption 2
Except for finite moments, the system of equation (1) satisfies the generalized Lipschitz condition, that is, with any

where
In the point of practical view, above assumptions on control objects are reasonable and acceptable. Hypothesis 1 is a typical constraint on general nonlinear systems in control system design. Assumption 2 is the upper bound limitation of the change rate of system’s output, that is, bounded-input makes bounded-output. The heading control subsystems of marine vehicles (ships, submarines, USV, offshore platforms, etc.) meet the above assumptions, obviously.
Theorem 1
If a nonlinear system satisfies Assumptions 1 and 2, when

where
The CFDL_MFAC algorithm is as follows 23

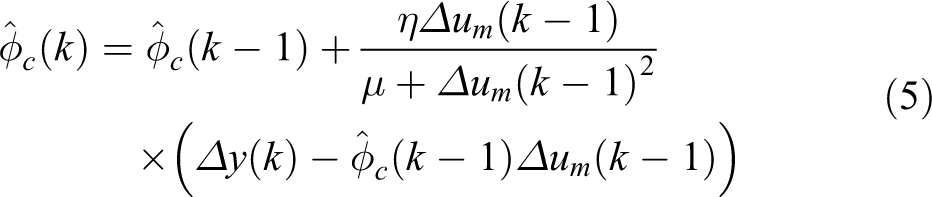

where
CFDL_MFAC algorithm only uses online input and output data of closed loop system to design controller, besides, the controller does not contain any explicit or implicit information of controlled system’s dynamic model. 23 PPD is insensitive to time-varying parameter, time-varying structures, time-varying phases and even delay, thus CFDL_MFAC has strong robustness and adaptability.
However, the algorithm cannot be directly applied to the heading control of USV. By analogizing the control structure of PID algorithm, it is known from formulation (5) that the CFDL_MFAC algorithm belongs to incremental integral control structure. The heading of USV will produce overshoot and oscillation, when rudder angle is controlled directly to control the heading of USV with CFDL_MFAC method. Besides, in the initial stage of USV heading control, or when the desired heading is changed greatly, the actual heading and expected heading of USV will have a great deviation in a short time. The existence of integral term results in integration accumulation of CFDL_MFAC algorithm, which makes USV heading control system produce large overshoot, even oscillation, and increases regulation time-consuming. Therefore, for USV heading control system, the CFDL_MFAC algorithm need to be improved.
Variable integral separation model-free control adaptive method with proportional control
In the view of inevitable oscillation and instability of CFDL_MFAC algorithm applied to heading control of USV, the control algorithm (5) is improved as follows

The algorithm consisting of formulas (5), (6), and (7) is called CFDL_MFAC method with proportional control (hereafter referred as MFAC_PC).
where kp is the ratio coefficient;
In the MFAC_PC algorithm, the existence of integral terms
The MFAC_PC algorithm is improved as follows: when controlled variable (USV heading angle) deviates greatly from set value, the integral term is reduced to avoid system stability reduction and overshoot increases due to the integral effect, at the same time, the control algorithm should still have stronger adaptability and faster response speed. When controlled variable approaches set value, the integral control is retained to eliminate static error and improve control accuracy. The improved algorithm is called variable integral separation model-free adaptive control algorithm with proportional control (VIS_MFAC_PC).
The VIS_MFAC_PC algorithm can be expressed as follows
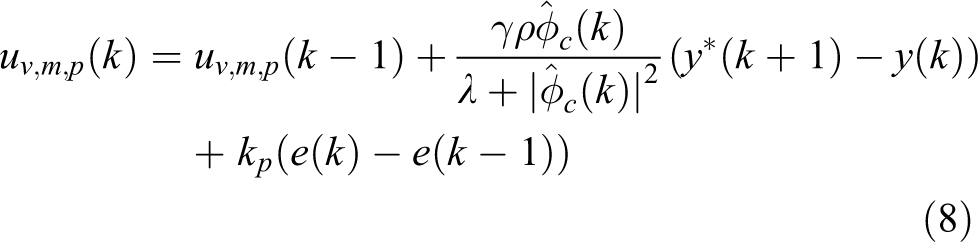



where γ is variable integral factor; e0 and
The working principle of VIS_MFAC_PC algorithm is as follows. Firstly, a dynamic linearization data model equivalent to nonlinear systems is established. Secondly, using the I/O data of the control system establishes the PPDs of the system. Finally, a weighted one-step forward controller is designed to realize MFAC of a nonlinear system based on data-drive. The whole control process is shown in Figure 1.

Heading control principle based on VIS_MFAC_PC method. VIS_MFAC_PC: variable integral separation model-free adaptive control algorithm with proportional control.
Experimental research and analysis
In order to build the “Dolphin IB” small USV simulation experiment platform, we need the maneuverability parameters of the heading control subsystem (8). The field maneuverability experiments are carried out by using “Dolphin IB” (Figure 2). Based on the identification of field experiments data, the heading maneuverability parameter of “Dolphin-IB” was

“Dolphin-IB” USV. USV: unmanned surface vessel.
In this article, simulation and field experiments are carried out on the USV named “Dolphin IB”, in order to further verify the robust and adaptive performance of the VIS_MFAC_PC method. “Dolphin IB” is shown in Figure 2, and relevant parameters of it are shown in Table 1.
Relevant parameters of “Dolphin-IB”.

The outfield test and simulation results are as follows.
Simulation test and analysis
In this section, the performances of the VIS_MFAC_PC algorithm is compared under two situations with PID control method. The first situation is when there is no uncertain influence, that is, without model perturbation and time lag in USV heading subsystem. The second situation is when the model parameter K increases by 50%, and the system has 2 s time delay.
Contrast experiments without uncertain influence
The initial state of the heading control subsystem is

Heading response without uncertain influence.
For the sake of the fairness of subsequent comparison, both controller parameters have been manually adjusted to better. It can be seen from Figure 3 that the response curves of PID and MFAC almost coincide with each other. The response time is about 30 s of the two controllers. The root mean square (RMS) from 30 s to 100 s of VIS_MFAC_PC method response error is 0.86° and the RMS of PID controller is 0.56°. The experimental results show that the two controllers have more consistent control performance without any disturbance.
Comparison experiments under uncertain influence
According to the theory of ship maneuverability, at the same time, the time delay characteristics of USV heading subsystem are also considered, the discrete mathematical motion model of the heading subsystem of USV can be expressed as
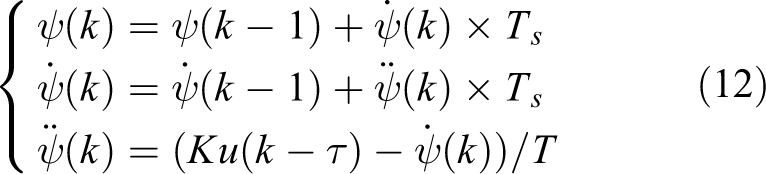
where K and T are maneuver coefficients; Ts is sampling time; τ is time delay constant for heading subsystem; and
Based on the identification of field test data, the heading maneuverability parameters of “Dolphin-IB” can be obtained as
The model parameter K exists 50% perturbation, that is, let K increases 50%, besides, USV heading subsystem has 2 s time delay. The test results are shown in Figure 4.

Heading response comparison of K exists 50% perturbation and heading subsystem has 2 s time delay.
It can be seen from Figure 4, when the model parameter K increases 50% and USV heading subsystem has 2 s time delay, the actual heading of USV is seriously oscillated under the action of PID controller and it cannot converge to the desired heading, and the heading system has become unstable. Using VIS_MFAC_PC algorithm, the actual heading of USV can converge rapidly to desired heading even though there is a small fluctuation at the beginning. The USV heading subsystem can still maintain stability with almost no overshoot and oscillation. The RMS from 40 s to 100 s of VIS_MFAC_PC method response error is 2.46° while the RMS of PID controller is 6.54°.
Simulation results show that VIS_MFAC_PC algorithm has better robustness and stronger adaptability than PID when USV heading subsystem has large model perturbation and time delay.
Outfield test and analysis
In order to further verify the robustness, adaptability, and practicability of the VIS_MFAC_PC method and promote engineering application, the proposed control method is applied to the USV of “Dolphin IB.” Experiments of USV heading control are shown in Figure 5.

“Dolphin-IB” USV experiments. USV: unmanned surface vessel.
Using VIS_MFAC_PC and PID algorithm to carry out field test, the USV speed is set 0.5 m/s at first. For the sake of the fairness of subsequent comparison, both controller parameters are manually adjusted to better. The controller parameters of VIS_MFAC_PC algorithm is

Heading response with USV speed is set at 0.5 m/s. USV: unmanned surface vessel.

Rudder angle response with USV speed is set at 0.5 m/s. USV: unmanned surface vessel.
Keep the parameters of the two controllers unchanged, then set the USV speed at 1.2 m/s, and the desired heading is −120°. The results of the heading control test are shown in Figures 8 and 9.

Heading response with USV speed is set at 1.2 m/s. USV: unmanned surface vessel.

Rudder angle response with USV speed is set at 1.2 m/s. USV: unmanned surface vessel.
As shown in Figures 6 and 7, when the USV speed is 0.5 m/s, the actual heading of “Dolphin IB” USV can converge to the desired heading under the action of the two controllers and almost no overshoot and concussion. The RMS from 20 s to 70 s of VIS_MFAC_PC controller response error is 1.43° while the RMS of PID controller is 0.99°.
According to Figures 8 and 9, after the USV speed is changed, the actual heading of USV is seriously oscillated under the action of PID controller and it cannot converge to the desired heading. The control performance is significantly deteriorated. In contrast, the VIS_MFAC_PC method ensures that the USV heading converges to the desired value without overshoot and no concussion, it still exhibits consistent dynamic performance. The RMS VIS_MFAC_PC controller response error is 0.76°, while the RMS of PID controller is 4.57°. Rudder angle error accumulation of PID and VIS_MFAC_PC controller from 10 s to 35 s is 2803 and 163°, respectively.
Conclusion
Aiming at the USV heading control problem with uncertainties, proportional control and variable integral separation are combined with CFDL_MFAC theory in the article. The following conclusions are obtained.
Through the analysis of CFDL_MFAC method, the heading subsystem of USV will inevitably appear oscillation and instability, when rudder angle is directly controlled by this method to control the heading of USV.
The VIS_MFAC_PC method is proposed, which solves the limitation of the basic CFDL-MFAC method that does not apply to the USV heading control directly.
Simulation and field experiments show that compared with PID controller, VIS_MFAC_PC method is insensitive to uncertain factors such as model perturbation and system time delay and shows better performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Natural Science Foundation of China (Grant No. 51779052), Innovation Special Zone of National Defense Science and Technology, Natural Science Foundation of Heilongjiang Province of China (Grant No. QC2016062), Research Fund from Science and Technology on Underwater Vehicle Laboratory (Grant No. 614221503091701), HeilongJiang Postdoctoral Funds for Scientific Research Initiation (Grant No. LBH-Q17046), Fundamental Research Funds for the Central Universities (Grant No. HEUCFP201741), National Natural Science Foundation of China (Grant Nos 51579022, 51709214, 51879057, 61633009), National Key R&D Program of China (Grant no. 2017YFC0305700), National Natural Science Foundation of China (Grant Nos. 51609047, 51509057), and China Postdoctoral Science Foundation (Grant No. 2017M621250).