
Abstract
With the development of technologies related to unmanned vehicles, including unmanned aerial vehicle and unmanned surface vehicle, unmanned vehicles play a pivotal role in maritime management and cruise activities. Meanwhile, lots of evidence shows that a single unmanned vehicle is not qualified for operation under complex environment, whereas the unmanned aerial vehicle–unmanned surface vehicle formation consists of multiple unmanned aerial vehicles and unmanned surface vehicles, which can enhance the performance of the single unmanned vehicle significantly. However, the cooperative operation performance of the unmanned aerial vehicle–unmanned surface vehicle formation is constrained by its communication capacity. Consequently, a cooperative communication framework is designed for the unmanned aerial vehicle–unmanned surface vehicle formation. A distributed dynamic network topology is constructed for fulfilling effective communication for the unmanned aerial vehicle–unmanned surface vehicle formation based on ad hoc network. Experiments are carried out by employing the built unmanned aerial vehicle–unmanned surface vehicle formation platform. Results verify the superiority of the designed cooperative communication framework for the unmanned aerial vehicle–unmanned surface vehicle formation.
Introduction
For the last two decades, with the rapid development of technologies in artificial intelligence, shipbuilding industry, and other fields, the unmanned aircraft, including unmanned aerial vehicles (UAVs) and unmanned surface vehicles (USVs),1–3 have been playing an ever-increasing pivotal role in generous domains, including water monitoring, marine scientific research, and maritime cruising. The USVs are flexible and famous for their long endurance time.4,5 Furthermore, USVs can also provide recharge service for UAVs featured by high speed, wide viewing angle, and effective working efficiency, and UAVs qualify for performing aerial tasks. 6 Types of tasks executed by USVs and UAVs become more complicated. A single unmanned aircraft is constrained by its operational level and cannot be competent to the task under complex operational environments. Therefore, the collaborative formation of USVs–UAVs is highly valued by enormous numbers of researchers and practitioners. 7
The UAV–USV formation possesses the flexibility and mobility that the single UAV and the single USV have, and is capable of information interaction and collaboration within its systems. There is no denying that the UAV–USV formation would effectively enhance its safety level and significantly improve its work efficiency through cooperation. Referring to the UAV–USV formation, one of its most important aspects is how to design its internal communication system. By employing the cooperative communication system, system robustness and work efficiency of each communication unit such as UAV and USV should be guaranteed effectively. 8
Following that, this article aims to develop a cooperative communication framework for the UAV–USV formation, improve its safety, and achieve effective communication. Within the communication framework, each communication node, including UAVs and USVs, can share data fluently, and the other communication node can join its communication network quickly. And then, the command node can utilize the communication link to send dynamic instructions in the formation.
It is necessary that a scientific and reasonable cooperative communication framework should be designed for the UAVs-USVs formation. As stated in the previous work,9–11 ad hoc network is a multi-hop, non-central, and self-organizing wireless network and is also known as multi-hop network, infrastructureless network, or self-organizing network. Within ad hoc network, the fixed infrastructure is not required, and each node in the network is movable and contacts with other nodes in real time. Then, the communication requirements of the UAVs-USVs formation during its movement process can be guaranteed by employing ad hoc network. Ad hoc network is widely applied in the ground and the UAV networks. 7 Meanwhile, USVs and UAVs are fast, efficient, and flexible, and their cooperation would overcome the shortcomings of the single USV or UAV. Consequently, by employing ad hoc network, the UAV–USV formation would fulfill a variety of networking modes without infrastructure requirements and be adopted in numerous domains, including border monitoring, traffic monitoring, and disaster monitoring.12,13
Some highlights of this article are as follows: (1) ad hoc network is utilized to design a cooperative communication framework for the UAV–USV formation; (2) its network architecture and communication design are elucidated; (3) the platform of the UAV–USV formation is built and experiments verify the effectiveness of our designed collaborative communication framework scheme.
Design requirement of the cooperative communication network for the UAV–USV formation
Requirement analysis of the cooperative network communication
Figure 1 shows the structure of the cooperative platform of the UAV–USV formation. The cooperative platform mainly consists of the ground control center, the UAVs, and the USVs.

Structure of the UAV–USV cooperative formation platform.
Functions of the ground control center are data processing, emergency command, and real-time monitoring of the UAV–USV formation cooperative system. The ground control center can collect and process data, give emergency orders to USVs and UAVs, and monitor the status of USVs and UAVs in real time. Capacities of the USVs include the perception of the marine environment, data sharing, and the supply platform of the UAVs. By employing the USVs, the dynamic marine environment can be sensed, data can be shared among the USVs, and the UAVs can be recharged on the USV platform. There is no denying that, with the aid of the USVs, the UAVs can achieve long-range cruise. And UAVs are mainly employed for achieving air environment perception, data processing, and long-range cruise. All the nodes, including the ground control center, the UAVs, and the USVs, are undifferentiated and independent, and information sent from other nodes can be received smoothly by any other node.
Figure 2 presents the schematic of the UAV–USV formation. It illustrates that the formation consists of three USVs and a UAV, and executes task cooperatively under environments with wind and waves. Generally, when the accident happened, the USVs and the UAV would travel to the site as soon as possible and then execute the search and rescue activities by employing the carried life-saving equipment without omissions. Referring to the core communication contents of the UAV–USV formation, they can be any of the following:
Control signals from the ground control center to the UAVs and the USVs;
Collected information from the UAVs and the USVs, including videos and pictures of environment, to the ground control center;
Location data transmitted within the UAV system or the USV system.

Schematic of the UAV–USV formation.
Features of the communication link in the UAV–USV formation are as follows:
Topology of the network is changing quickly due to the excellent maneuverability of the UAVs and the UAVs;
Restrained by the limitation of communication distance, multi-hop communication is required;
Routing cost should be low if the network topology changes;
Nodes of the UAVs and USVs are more vulnerable to congestion, owing to excessive information collected by them;
Significant time effectiveness;
Equipment is hindered by the power supply;
To enhance the link survival time, communication load balance of the UAVs and the USVs should be considered.
Among the ground control center and the gateways of the UAVs and USVs, the communication links are with large data and fixed link, and their routing protocol can provide sufficient bandwidth to support information transmission, such as image, video, voice, and control commands.
Consequently, when it comes to the requirements of the cooperative communication framework of the UAV–USV formation, the following criteria should be satisfied:
Communication link between the UAV network and the USV network should be with small routing delay and low network load.
Cluster networks of the UAVs and the USVs are capable of resisting strong destructions.
To prolong the cruising range of the UAVs and the USVs, the energy cost of data transmission between communication nodes should be as low as possible.
Communication links among the UAV gateway, the USV gateway, and the ground control center should be with large link bandwidth, stable wireless signal, small bit error rate, and small routing delay.
Routing protocol of the UAV–USV formation
Referring to the ad hoc network employed in the UAV–USV formation, it is a dynamic multi-hop wireless mobile network formed by the UAVs and the USVs without central stations. The network structure of the ad hoc network is a multi-node peer-to-peer network. Each node can access or exit the current network depending on the requirements. Compared with the traditional network, it is featured by self-organization and multi-hop communication. Each node in the ad hoc network can receive and forward information, and any two nodes can form a pair of source destination nodes. Nodes in the network, including the UAVs and the USVs, are equipped with wireless transmitters and receivers. Meanwhile, data communication between nodes generally requires assistance from other nodes by multi-hop transmission. Thus, in the design process of the communication network for the UAV–USV formation, it is essential that routing protocol should be concerned.
Traditionally, routers of the communication networks are static in general and are seldom joining or leaving the networks in the process of communication. It is obvious that, owing to the dynamic changing topology, general routing protocols cannot live up to the requirements of the mobile ad hoc networks. Following that, as shown in Figure 3, many routing protocols with and without location information have been designed in view of the above characteristics of the specific mobile wireless ad hoc network application environment. Routing without location information protocols consists of two categories: flat routing protocol and hierarchical routing protocol. 14 Details of the routing protocols utilized by mobile ad hoc network are shown in Figure 3.

Main types of routing protocols for mobile ad hoc networks.
From Figure 3, it can be seen that there are two kinds of protocols in flat routing. One is the table drive routing protocol, including optimized link state routing (OLSR), destination sequence distance vector (DSDV), and fisheye state routing (FSR), and the other is the on-demand routing protocol, including ad hoc on-demand distance vector (AODV), dynamic source routing (DSR), and temporally ordered routing algorithm (TORA). The representative protocols of hierarchical routing are zone routing protocol (ZRP), landmark ad hoc routing (LANMAR), and cluster gateway switch routing protocol (CGSR). There is no denying that, for a single UAV or USV, the protocols illustrated above can be satisfied with the requirements of the ad hoc network.
However, referring to the UAV–USV formation in the time-varying environment, owing to its flexible mobility and dynamic changing topology, only the routing with location information protocol is suitable for the UAV–USV formation. Generally, the routing with location information mainly contains greedy perimeter stateless routing (GPSR), relative distance micro-discovery ad hoc routing (RDMAR), and Geocast and can optimize routing performance of ad hoc network by location information of nodes. By utilizing location information, the flooding of routing discovery can be limited substantially, and then the number of topological control messages can be reduced in essence.
Design of communication network
Network architecture
Varying with the advanced level of the loaded equipment on the UAV–USV formation and difficulty of the task, there can be various formation forms, mainly including the formation composed of a UAV and several USVs, the formation composed of several UAVs and a USV, and the formation composed of several UAVs and several USVs. To this end, our designed cooperative communication scheme would be suitable for the above three types of formations. Following that, by employing a hierarchical topology network, we design a cooperative communication scheme for the UAV–USV formation, and its corresponding network architecture is shown in Figure 4, where

Schematic of the cooperative communication framework for the UAV–USV formation.
Referring to the communication device, for the communication between the groups of the UAVs and the USVs, it should be capable of achieving long-distance communications and resisting interference effectively. Then, the cost of the communication devices would be high. Whereas, the device for the communication among each group, such as the UAVs, the USVs, is not necessary satisfied with the above requirements. And the corresponding cost of the communication devices would be low. Consequently, as shown in Figure 4, two ad hoc networks are constructed within the UAV group and the USV group, respectively. Then, to complete the communication between the groups of the UAVs and the USVs, the above two ad hoc networks are connected through the gateway nodes. It indicates that our designed communication scheme fulfills the communication goals of the three typical UAV–USV formations. Furthermore, the cost of the communication devices can be reduced significantly by employing our cooperative communication scheme.
In contrast to the traditional networks which should be equipped with fixed devices for the nodes, the wireless ad hoc network adopted by our scheme for the UAV–USV formation is a multi-node peer-to-peer network, and each node can join or leave the current network dynamically without fixed communication devices, whereby a succession of UAVs and USVs can access the UAV–USV formation according to the task requirements conveniently.
Referring to the communication nodes of our UAV–USV formation, there are the nodes of the UAVs, the USVs, and the ground control center. The above nodes have different communication ranges, and each node should be equipped with reasonable equipment with different communication ranges. Each node is allocated a global unique ID number to avoid receiving error packets. In addition, to prevent repeatedly receiving a packet, each data packet is numbered by employing a cyclic link composed of multiple UAVs and USVs. And to transmit videos and other environmental information fluently each node is with the same communication bandwidth.
Figure 5 shows the schematic of the cooperative communication network for the UAV–USV formation. For the groups of the UAVs and the USVs, their communication distances are relatively short, and then KYL-320H digital radio is selected as their potential communication device. Nevertheless, communication distances between the UAVs and the USVs, between the UAVs and the ground control center, and between the USVs and the ground control center are quite long. Thus, we choose P400-840-OEM digital radio with better performance and higher cost for the communication networks. Consequently, by utilizing the above configuration scheme of the communication devices, communication networks for the UAV–USV formation can be fulfilled effectively and economically.
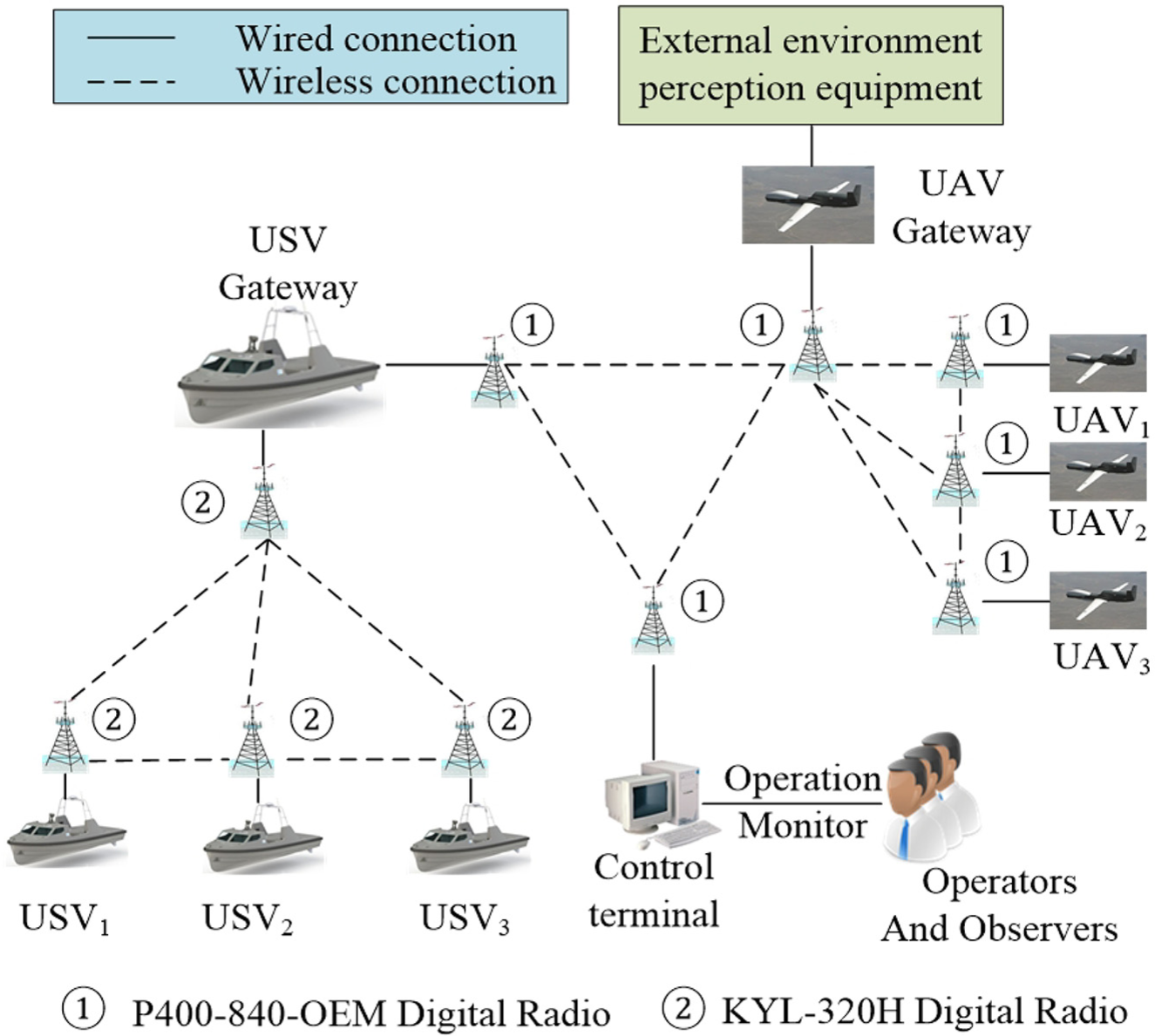
Schematic of the cooperative communication network for the UAV–USV formation.
Network communication by LCM
To guarantee the information reliability and reduce delay during information transmission, in the data collection and communication, lightweight communications and marshalling (LCM) module based on the publish/subscribe mode is employed for our cooperative communication scheme. Using LCM, the real-time information transmission can be achieved.
LCM is a development kit for developing the messaging system with good real-time performance and is designed by the modular approach. LCM’s different modules are able to run on the same platform or on different hardware platforms without affecting each other. 15 And LCM’s main goal is to simplify the development of messaging systems with low latency, especially for real-time robot system, such as the UAV–USV formation.
LCM can be divided into several modules, including the specification of type definition module, data marshaling module, communication module, and tool module. Specification of type definition presents ways and syntax to define compound data types. By employing the compound data types, data in LCM can be defined and named correspondingly. Data marshaling module refers to the process of encapsulating a message into a data packet. Communication module is designed by the message transmission system based on publish or subscribe mode.
Figure 6 presents the communication flow chart of LCM. At first, each variable is initialized when the UAVs and the USVs start communication, wherein the time scale
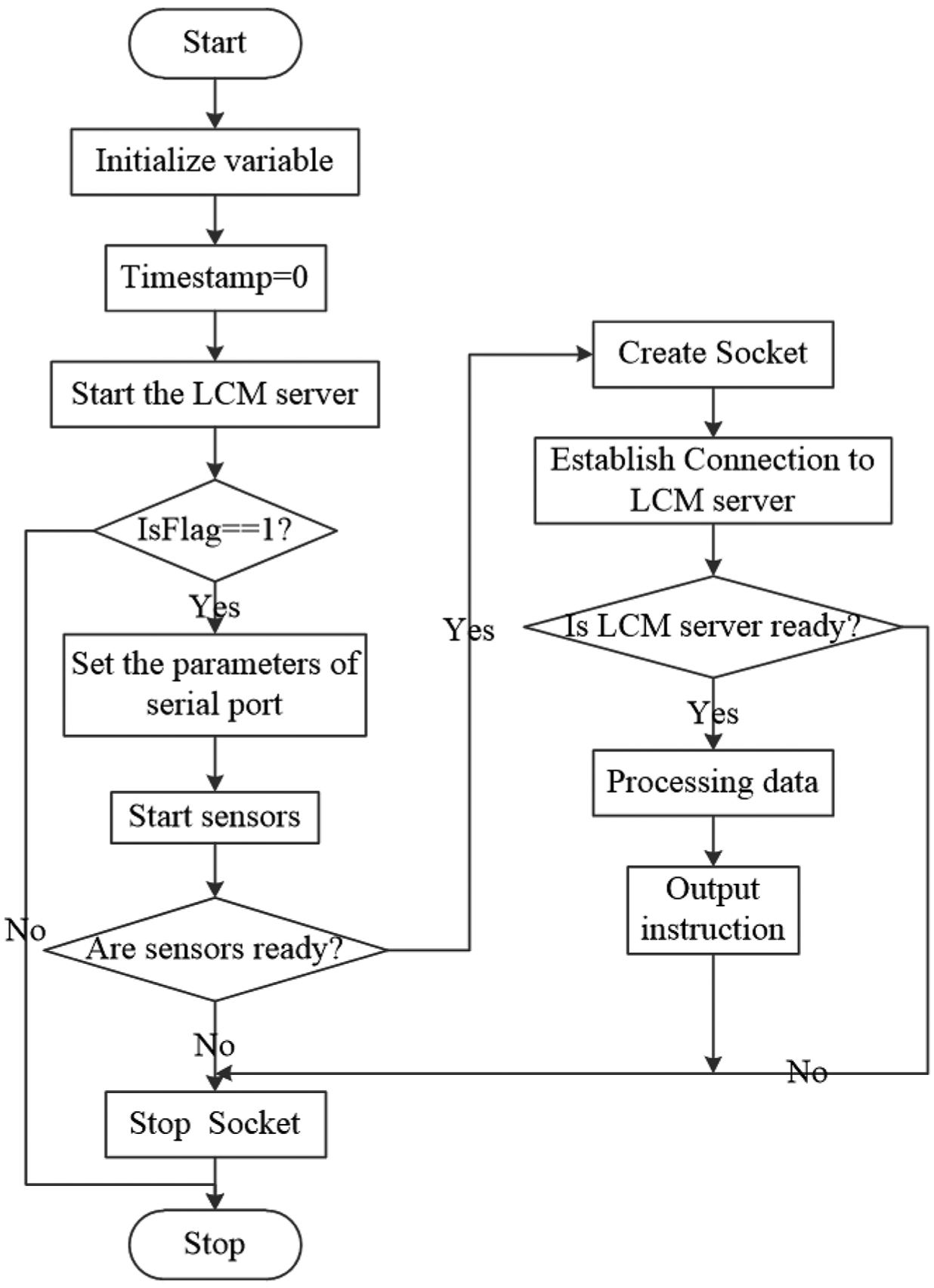
Communication flow chart of LCM.
Characteristics of network performance
To probe into characteristics of our cooperative communication scheme for the UAV–USV formation, several aspects of the scheme, including division of the communication group, invulnerability and reliability of the network, and strategy of cost control, would be analyzed in detail.
Within the communication network, there are mainly two groups: the UAV group and the USV group. The communication network topology of the USVs and the UAVs should be illustrated clearly. 16 The UAV group consists of a gateway UAV and several general UAVs, and the USV group is also composed of a gateway USV and a number of ordinary USVs. The gateway UAV and USV are responsible for data forwarding between the above two groups. Furthermore, the internal communication of each group does not interfere with each other. Within each group, to form a new level of ad hoc network beneath the current network, the general UAVs and USVs can be employed as a gateway without modifying its network structure.
When it comes to the invulnerability of our designed network, benefit from the novel network group division method, the internal communication of each group can be constructed quickly. And if there is a communication failure in one of the gateway nodes, the communication network can select any other UAV or UAV as the new gateway. Consequently, our communication network is effectively resistant to destruction.
Referring to the reliability of our designed network, communication functions of the general UAVs and USVs are relatively simple and their routing maintenance is quite easy. Consequently, the reliability of the designed network can be enhanced essentially. Meanwhile, by employing the fixed link communications among the groups of the UAVs, the USVs, and the ground control center, the UAVs and the USVs can be controlled effectively without link congestion.
As far as the strategy of our scheme’s cost control is concerned, because the network is divided into several groups, the routing expense is quite low and the system is with high throughput. Besides that, economical communication equipment can be configured for the two groups and then the cost can be controlled considerably.
Case studies
To verify the communication performance of our cooperative communication framework designed for the UAV–USV formation, with the aid of our existing equipment conditions, as shown in Figure 7, we complete an UAV–USV formation platform correspondingly.

Our self-built UAV–USV formation platform: (a) three USVs (a USV is with a length of 1.8 m and the other two USVs with the length of 0.5 m) and a UAV; (b) the UAV–USV formation is executing task; (c) the UAV lands on the deck of the USV.
In Figure 7, according to our proposed cooperative communication framework, our UAV–USV formation system employed in the experiments consists of three USVs and one UAV. As shown in Figure 7(a), there is only a UAV in the UAV group, whereas, the USV group is composed a USV with a length of 1.8 m and two USVs with a length of 0.5 m. The USV with the length of 1.8 m and the UAV assume the roles of gateways. The UAV–USV formation is executing a task cooperatively in Figure 7(b), and once the task is completed, the UAV would land on the deck of the USV as shown in Figure 7(c).
Within the UAV–USV formation, the UAVs and the USVs jointly perform a task. The USV group would entail most of the tasks and is equipped with lots of devices, whereas the UAV group undertakes long-distance missions, including cruise and reconnaissance. Restrained by our experimental condition, we conduct the water test in an area with a scale of 75 m × 55 m and adopt the 2.4G module and the WiFi module to fulfill the communication scheme. Because the one-to-one and one-to-many communications can be achieved by the 2.4G module and WiFi module quite well, our communication scheme can be realized by them within a short range. Following that, referring to the internal communication device of the USV group, the 2.4G communication module is utilized to replace the KYL-320H digital radio station as illustrated in Figure 8. And, instead of the P400-840-OEM digital radio station shown in Figure 5, the gateways of the UAV group, the USV group, and the ground control center specify the WiFi module as the long-distance communication device. Consequently, the above communication devices are applied to implement a cooperative communication network for the UAV–USV formation.

Transmission delay of the designed cooperative communication network in the UAV–USV formation with different distances.
Performances of our cooperative communication scheme for the UAV–USV formation are shown in Figures 8 and 9. Figure 8 shows the transmission delay of the network with different distances. Figure 9 shows the details of data packets of the UAV–USV formation.

Statistics of data packets that the four nodes send, receive, and lose in the cooperative communication network of the UAV–USV formation: (a) statistics of data packets of thefirst node, (b) statistics of data packets of the second node,(c) statistics of data packets of the third node, and (d) statistics of data packets of the fourth node.
In Figure 8,
To validate the stabilization of our cooperative communication scheme, the UAVs and the USVs send data packets to the communication network of the UAV–USV formation continuously. As shown in Figure 9, the statistical data are obtained during the UAV flying toward the USV at a low speed.
In Figure 9, the states
Conclusion
This article proposes a cooperative communication scheme for the UAV–USV formation, after thoroughly probing into the cooperative operation model and the communication network solution of the UAV–USV formation. Within the designed cooperative communication scheme, the locating method guarantees the precision location of the UAV–USV formation, the communication network can be constructed quickly, and the dynamic distributed topology network can ensure that each node shares information fluently and fulfills system stability essentially. By employing our constructed systems of the UAV–USV formation, experiments verify the effectiveness and stability of the cooperative communication scheme. In the near future, we would implement our cooperative communication scheme on the large-scale UAV–USV formation.
Footnotes
Handling Editor: Zhixiong Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Science Foundation of China (51579202, 51309186, 61773401, 61673223, and 71501151) and project funded by China Postdoctoral Science Foundation (2015T80848 and 2014M560633).