
Abstract
A scheme to solve the course keeping problem of the unmanned surface vehicle with nonlinear and uncertain characteristics and unknown external disturbances is investigated in this article. The chattering existing in global fast terminal sliding mode controller in solving the course keeping problem of the unmanned surface vehicle with external disturbance is analyzed. To reduce the chattering and eliminate the influence of the unknown disturbance, an adaptive global fast terminal sliding mode controller based on radial basis function neural network is developed. The equivalent control that usually requires a precise model information of the system is computed using the radial basis function neural network. The weights of the neural network are online adjusted according to the adaptive law that is derived using Lyapunov method to ensure the stability of the closed-loop system. Using the online learning of the neural network, the nonlinear uncertainty of the system and the unknown disturbance of external environment are compensated, and the system chattering is reduced effectively as well. The simulation results demonstrate that the proposed controller can achieve a good performance regarding the fast response and smooth control.
Keywords
Introduction
Unmanned surface vehicle (USV) plays a vital role in anti-submarine warfare, mine countermeasures, environmental detection, water sampling, personnel search and rescue in the ocean, and so on. 1 –3 An effective course keeping controller is essential for the highly autonomous USV in navigation. 4 Because of the complex, nonlinear, and uncertain characteristics of the ship, 5 coupled with the complex and changeable external navigation environment such as wind, wave, and currents, the course keeping problem becomes more complicated. It is a challenge to design a high-performance course keeping controller that has strong robustness and fast response speed.
Many studies of the USV’s course keeping have been done by scholars. The conventional proportional–integral–derivative (PID) controller is a simple and easily constructed controller. However, when the external environment changes, the performance of the PID controller is affected. 6 Considering the uncertainty and external disturbance of the system, some new control strategies have been proposed by scholars to obtain better control performance in recent years. The linear quadratic regulator theory, 7 model predictive control (MPC) technology, 8 backstepping method, 9 –11 dynamic surface control technology, 12 fuzzy control, 13 –16 neural network, 17 –19 sliding mode control, 20 –23 and so on, are all used to design the controller for course keeping of the ship. A linear quadratic adaptive controller combined with a Riccati-based anti-windup compensator has been designed for course keeping of the ship with uncertain dynamics using the Certainty Equivalence Principle. 7 The stability of the system under arbitrary disturbance is guaranteed with consideration of the input saturation of the rudder angle. A disturbance compensating MPC algorithm has been applied to solve the course keeping problem of ship as well. 8 The state constraints in the presence of external environmental disturbances are satisfied. The aforementioned two controllers have good performance in terms of reducing heading error and satisfying yaw velocity and actuator saturation constraints. They adopt linear models to describe the steering characteristics of the ship in the control law designs, but in fact, the steering system of the ship has the characteristics of nonlinear uncertainties. There are many control strategies developed to deal with the uncertain nonlinear systems in recent years. 24 For example, an innovative adaptive approximation-based regulation control scheme is developed for a general class of uncertain nonlinear systems, including unknown dynamics, which are not feedback linearizable. 25 A backpropagating constraints-based trajectory tracking controller is developed for trajectory tracking of a quadrotor with complex unknowns and cascade constraints arising from constrained actuator dynamics, including saturations and dead zones. 26 For the ship with nonlinear manipulation characteristics and uncertainties, intelligent control algorithms combined with some advanced control methods are also used in the controller design for course keeping. A backstepping controller combined with radial basis function (RBF) neural network has been proposed for course keeping of the ship with uncertainties and unknown external disturbances. 9 An adaptive nonlinear control strategy combined dynamic surface control and Nussbaum gain function with backstepping algorithm has been proposed for the course keeping of ships with parameter uncertainties and completely unknown control coefficient. 12 Fuzzy control is also used to deal with the system with unknown dynamics. 27 A model reference adaptive robust fuzzy control algorithm has been presented for course keeping of the ship. 13 Considering the unknown yaw dynamics and measurement noises, a robust adaptive course keeping controller of USV has been developed with the aid of a predictor, neural networks, and a modified dynamic surface control technique. 17 An integrated nonlinear feedback course keeping controller is developed to improve the robustness of motion control in heavy sea states. 28 These aforementioned control strategies effectively improve the control performance of the nonlinear system and reduce the impact of system uncertainties and external disturbance on the system. However, these algorithms are computationally complex and difficult to implement. Although the stability of the systems is discussed, they cannot guarantee the infinite time convergence of the system states and the convergence speed cannot be guaranteed.
As a real-time control system, the response speed is an important control quality index to evaluate its performance . The finite-time control can solve the problem of finite-time convergence of the system states. 29 –31 Homogeneous dynamic system theory, 32 finite-time Lyapunov theory, 33 terminal sliding mode (TSM) control, 34 –36 and so on, are the main methods of the finite-time control. The TSM control introduces a nonlinear switching surface, and the system state can slide to the equilibrium point in finite time after reaching the sliding surface. However, when the system state is close to the equilibrium point, the convergence speed is slower than that of the linear sliding surface. To improve the convergence speed of the system states, the global fast terminal sliding mode (GFTSM) controller is chosen for the course keeping. 37 GFTSM control technology can ensure that the tracking error converges to the equilibrium point at a faster speed in finite time. 38 Some scholars have applied the GFTSM control technology to solve the problem of ship’s course keeping. 39,40 But GFTSM control has some disadvantages. Firstly, the system dynamics is needed in the calculation of the equivalent control that limits its application. Especially, some parameters are difficult to obtain because the navigation environment is complex and the cruising state is changeable. Secondly, the GFTSM control requires the external disturbance to be bounded. Actually, it is hard to estimate the upper bound of its disturbance in real applications. Thirdly, the system chattering is inevitable with the consideration of the external disturbance and modeling error because of the discontinuous item in the switch control. It is aggravated as the disturbance increases. The chattering will accelerate the wear of the mechanical system and it is not suitable for application in the actual mechanical systems.
The neural network that can effectively solve the problems with regard to unknown nonlinear systems attracts many concerns from researchers. 41,42 The combination of the neural network and GFTSM control technology not only compensates the approximation error of the neural network but also reduces the dependence of the GFTSM controller on the system parameters. 43,44 The system chattering is greatly reduced as well. A novel adaptive GFTSM controller for course keeping of the USV based on RBF neural network is proposed in this article. The RBF neural network is used to compute the equivalent control, and the GFTSM control technology is combined to achieve heading angle tracking in a fast speed without knowing the upper bound of the disturbance and the precise model information of the system.
The remainder of this article is arranged as follows. In the section “problem formulation,” a brief description of the dynamics model of USV is proposed. The section “GFTSM controller design for course keeping” presents the GFTSM controller design for course keeping of the USV. The novel adaptive GFTSM controller combined with RBF neural network is proposed in the section “GFTSM-NN controller design for course keeping.” Simulation results and analyses of the proposed control system are shown in section “Simulation results.” In the last section, the whole article is concluded.
Problem formulation
The motion of the USV in six degrees of freedom (DOF) is shown in Figure 1. The body-fixed reference frame oxyz is fixed to the USV. The USV can move and rotate along the tree coordinate axes. The earth-fixed
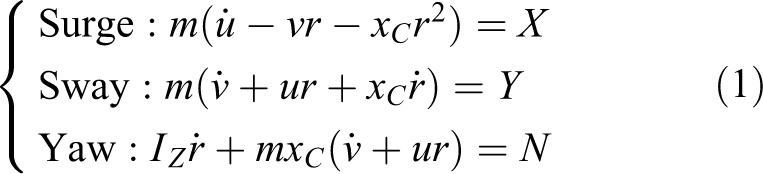
where u, v, and r stand for the surge velocity, sway velocity, and yaw rate, respectively; X, Y, and N are external forces with respect to surge, sway, and yaw; m is the mass of the USV; IZ is the rotational inertias; and xC is the coordinate of the ship center in the body-fixed reference frame. Assuming that the mean forward speed is constant U for constant thrust, and the sway velocity v, the yaw rate r, the rudder angle δ, and the perturbations are small, the steering equations of motion are completely decoupled from the speed equation as

where ψ is the heading angle. The hydrodynamic force and moment can be modeled as

where

where d is the disturbance term that includes the unknown external disturbances and the modeling errors, and K and T are hydrodynamic coefficients related to the parameters such as quality and shape of the ship, cruise speed, and the depth of the water. They are positive when the ship is line movement stable and difficult to obtain.
29

where a1 and a2 are Norrbin coefficients related to the parameters such as quality and shape of the ship, cruise speed, and the depth of the water. For the sake of writing conveniently, equation (4) can be rewritten as

where
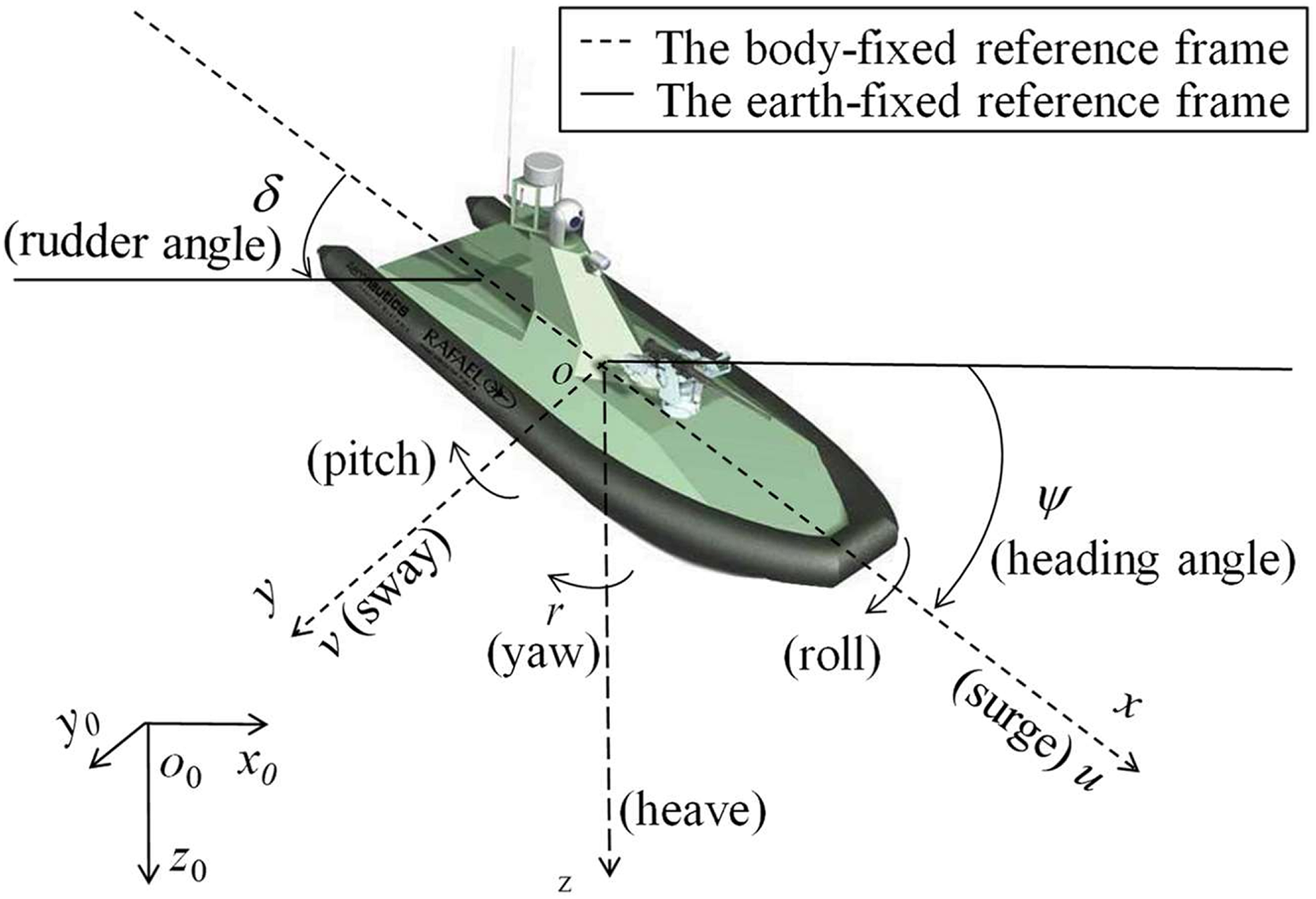
Six DOF motion of the USV. DOF: degree of freedom; USV: unmanned surface vehicle.
GFTSM controller design for course keeping
A course keeping control algorithm based on the GFTSM control theory is proposed to accomplish the heading angle tracking of the USV in this section. Assume that the desired heading angle is

The task of the controller design is to make the tracking error e converge to zero in finite time. According to GFTSM control theory, design the global fast sliding surface variable as

where
When the state of the system is far away from the equilibrium, the convergence rate is mainly determined by the fast terminal attractor

Take the time derivative of equation (8) along with equations (6) and (7), the following equation is obtained

Based on sliding mode control theory, the control δ consists of the equivalent control

Design the switch control

where φ and γ are positive parameters to be determined, and p and q are odd integers which satisfy

Take equation (13) into equation (10), the derivative of s is rewritten as

Define the Lyapunov function

where

then

By solving the differential equation (17), the time of the sliding surface variable converges from any state that

The equation (16) can be rewritten as

where σ is a positive real number. Because

It shows that the sliding surface variable can converge to zero in finite time as long as the parameters are properly selected. It also can be seen from equation (19) that because
GFTSM-NN controller design for course keeping
In the GFTSM controller design, the precise dynamics model of the system and the upper bound of the disturbance should be known. While the dynamics model of the USV contains nonlinear uncertainty and the parameters are difficult to acquire. They change with the cruise speed and external environment during the actual navigation. The upper bound of the disturbance is hard to estimate as well because of the complex and changeable navigation environment. In addition, the system chattering is inevitable as analyzed in the last section. To solve these problems, an adaptive GFTSM controller based on RBF neural network (GFTSM-NN) is proposed for course keeping control in this section. It integrates GFTSM control technology and RBF neural network to achieve an improved performance.
The controller design and stability analysis
The block diagram of the GFTSM-NN control system for course keeping is shown in Figure 2. From which we can see that the control

Block diagram of the GFTSM-NN control system. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
To compensate the external disturbance, the control is designed as

where

Compared the equation (22) with equation (11), the added term “

Since

and submit it to equation (10), the derivative of the sliding surface variable can be written as

Assume that the RBF neural network has n hidden layer nods and the input of the neural network is s. Then the output of the neural network

where

where ci is the center value of the i th hidden layer neuron and bi is the width of the i th hidden layer neuron. There is an ideal neural network weight vector

where ε is a very small positive number. The approximate error can be described as

where

The adaptive law can be derived using the Lyapunov method to guarantee the system stability. The sliding surface variable is designed as equation (8). It has been proved in the previous section that the tracking error e will converge to zero when the sliding surface variable s is zero. Then, it should be proved that s and

The time derivative of
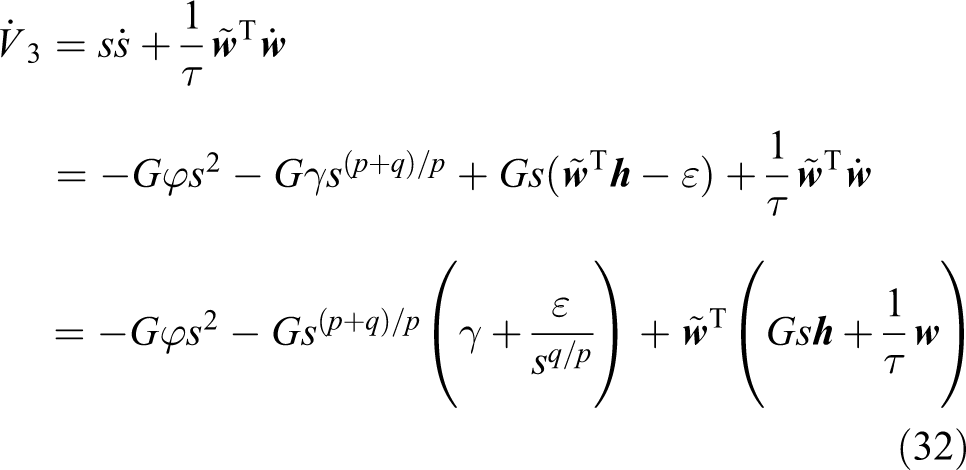
To ensure the system stability, the appropriate adaptive law and parameters are selected to make the

The equation (32) can be written as

If the parameter γ satisfies
The steps of the GFTSM-NN control algorithm
There are six steps to compute the control as shown in Figure 3.
Step 1: Parameter initialization. Initialize the parameters of the controller, such as p0, q0, p, q, α, β, φ,
Step 2: Detect the actual heading angle and its yaw rate of the USV in real-time and subtract the desired values from them to obtain the position error e and velocity error
Step 3: Compute the sliding surface variable s according to equation (8). Compared with the conventional sliding mode control method, the added exponential term will speed up the system convergence.
Step 4: Update the weights of the RBF neural network according to equation (33) which is derived using Lyapunov method.
Step 5: Compute the output of the RBF neural network
Step 6: Compute the control according to equation (24). It consists of two parts: the output of the RBF neural network and the switch control.

The steps of the GFTSM-NN control algorithm. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
Simulation results
In this section, a comparison study of the GFTSM controller and the proposed GFTSM-NN controller is presented to show the feasibility and effectiveness of the proposed method. Given the USV is DH-01, which is 110-cm long, 36-cm wide, 5.4-kg weight. Its max power is 36 W. The coefficients of the USVs kinematic model are listed in Table 1. 17
Coefficients of the USV’s kinematic model

USV: unmanned surface vehicle.
The parameters of the RBF neural network are designed as
The straight line tracking
The simulation results of the two control systems for straight line tracking are provided in Figures 4 to 10. The desired input is a constant. Figures 4 and 5 depict the heading angle tracking characteristics and tracking errors of the two controllers, respectively. It can be observed that both outputs of the two control systems can track the linear input quickly and accurately, and the tracking errors converge quickly. The GFTSM-NN controller can follow the desired heading angle in 3 s while the GFTSM controller needs nearly 3.5 s. The former one has a faster tracking speed. Figure 6 depicts the tracking characteristics of the yaw rate, from which we can see that the speed signal can be tracked quickly by both controllers as well, and the GFTSM-NN controller has a faster tracking speed. From Figures 4 to 6, it can be seen that both systems have good performance of straight line tracking, and the GFTSM-NN control system designed in this article has a faster response speed. Figure 7 depicts the curves of the sliding surface variable s, they converge in both control systems. The sliding surface variable s of GFTSM-NN converge faster than GFTSM.
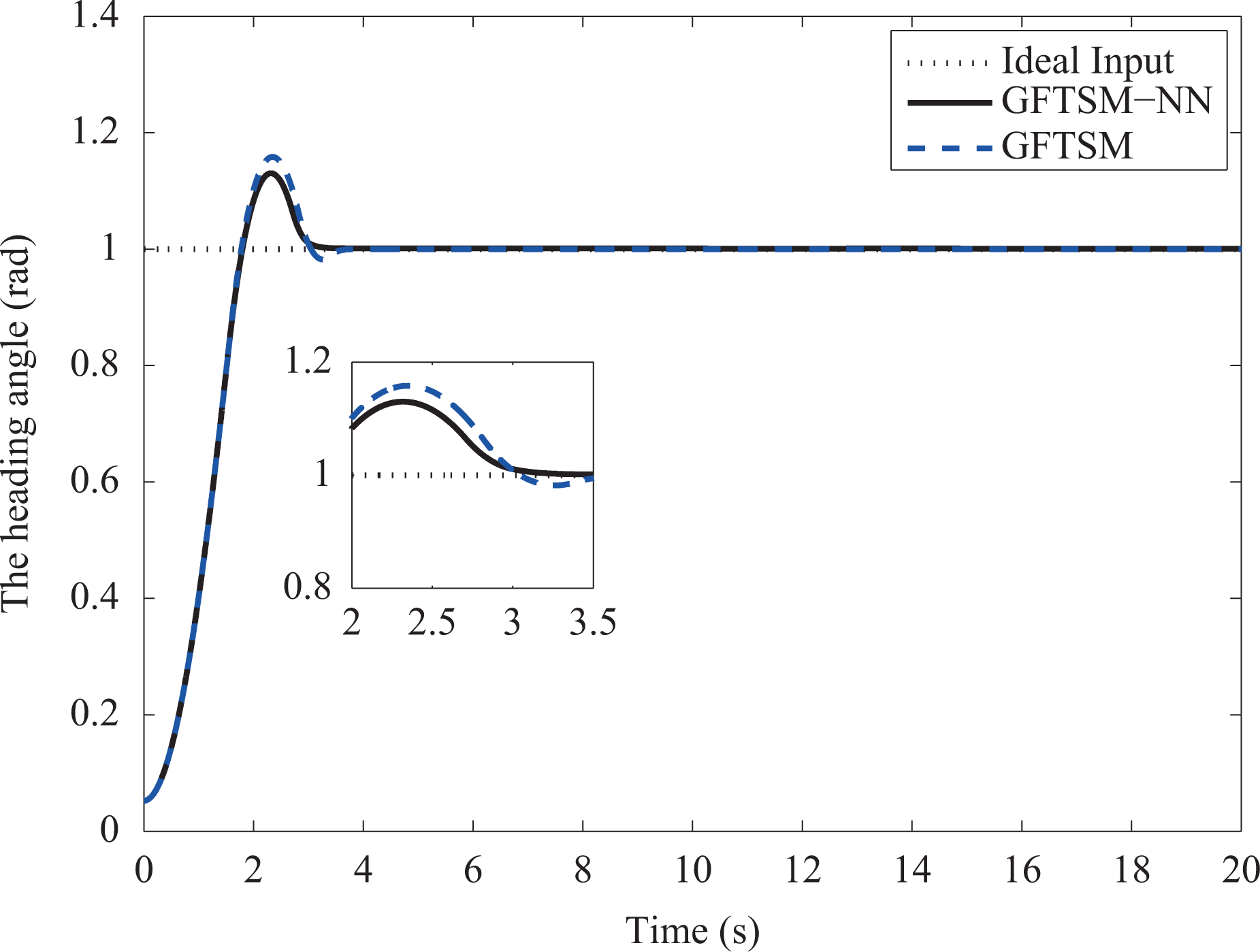
The heading angle tracking of the straight line. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
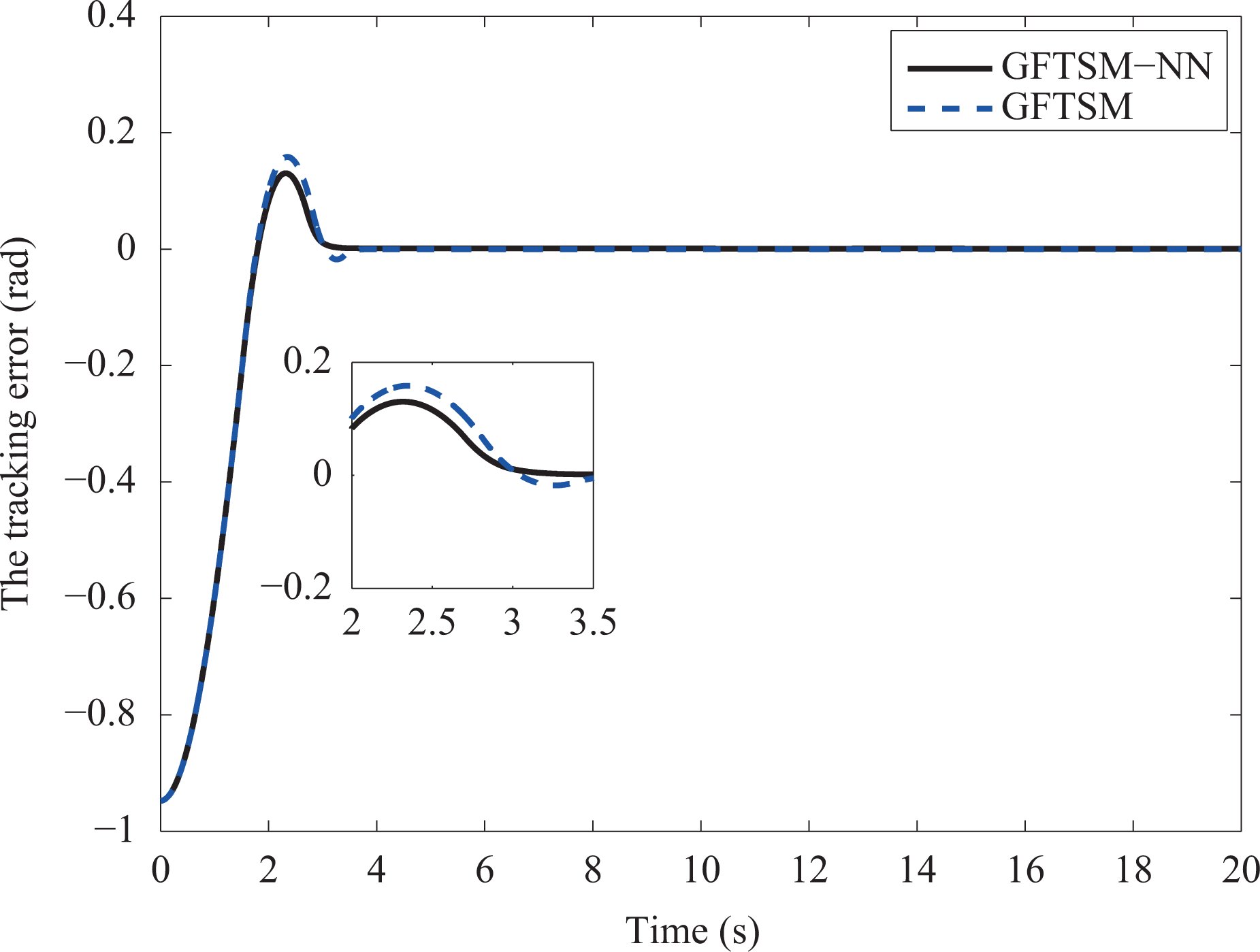
The tracking error of the heading angle (straight line). GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The yaw rate tracking of the straight line. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The sliding surface variable s of the straight line tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
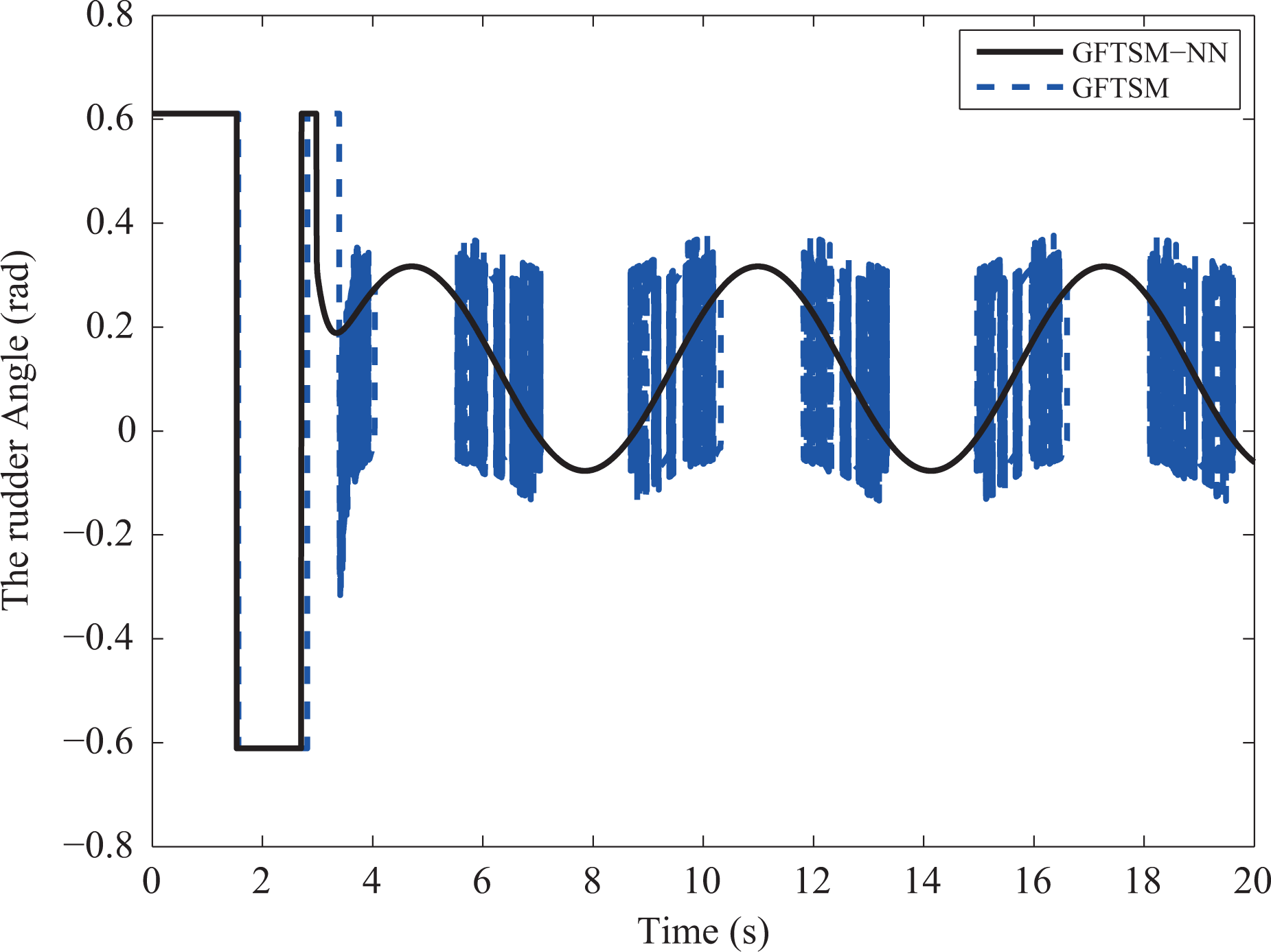
The rudder angle of the straight line tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The weights of the neural network (straight line).
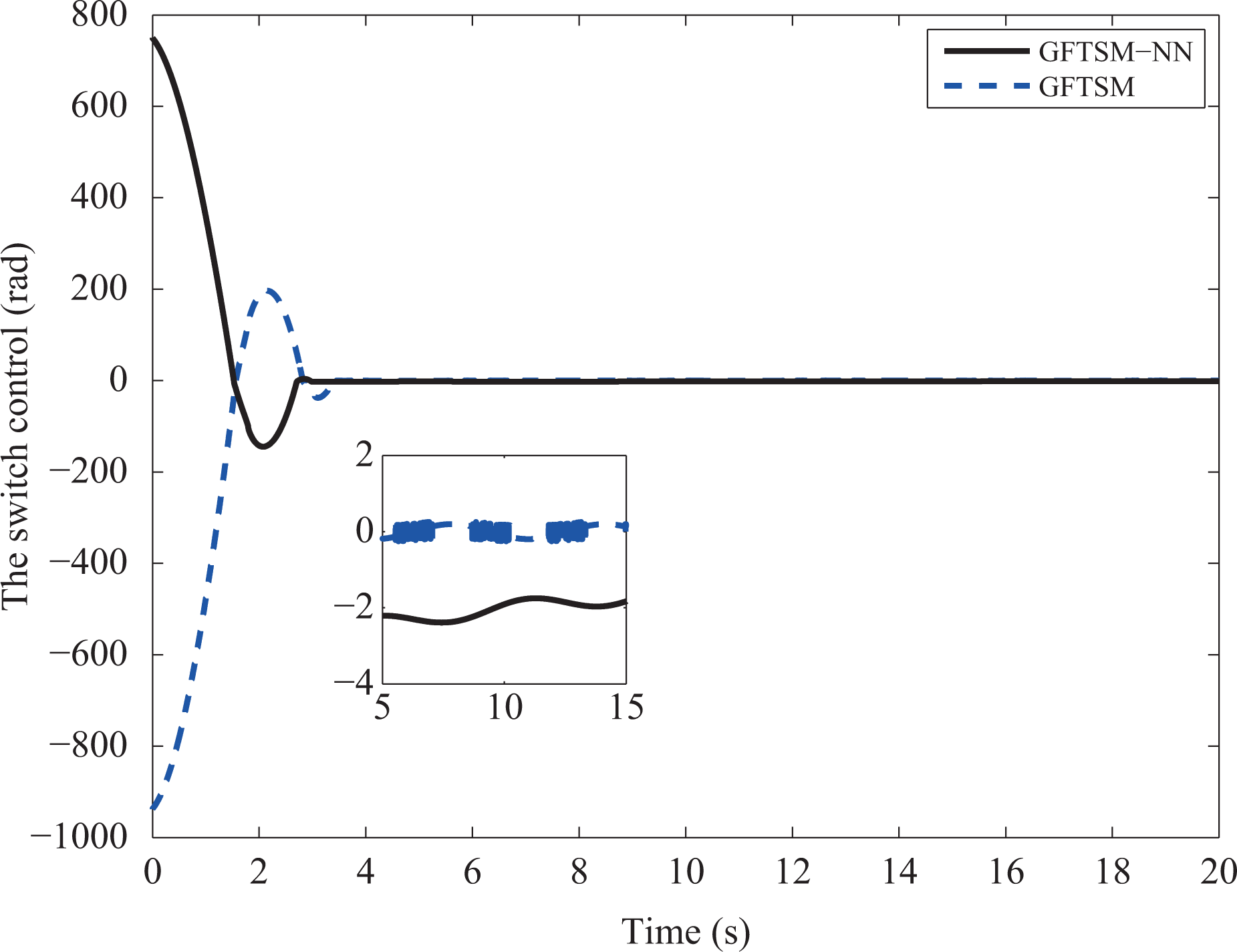
The switch control of the straight line tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
Figure 8 depicts the rudder angle of the USV. It can be observed that the rudder angle of the GFTSM controller is chattering. The high-frequency action accelerates the wear of the mechanical system, and it is not suitable for application in the actual mechanical system. Meanwhile, the rudder angle of the GFTSM-NN controller is smooth in the extreme. Because there is a disturbance in the system, the switching control of the GFTSM controller must continuously switch to eliminate the influence of the disturbance, and the greater the disturbance, the greater the system chattering. The related theory has been explained in “GFTSM controller design for course keeping” section. When the neural network whose weights are drawn in Figure 9 is employed to compute the equivalent control in the GFTSM-NN controller design, not only the controller is independent of the systems precise model information but also the system disturbance is compensated, and the system chattering is greatly reduced as well. Simulation results are consistent with the theoretical analysis. The curves of the switch control

The parameter γ of the straight line tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
The curve tracking
The simulation results of the two control systems for curve tracking are provided in Figures 12 to 20. The desired input is a sine function, that is,

The heading angle tracking of the curve. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
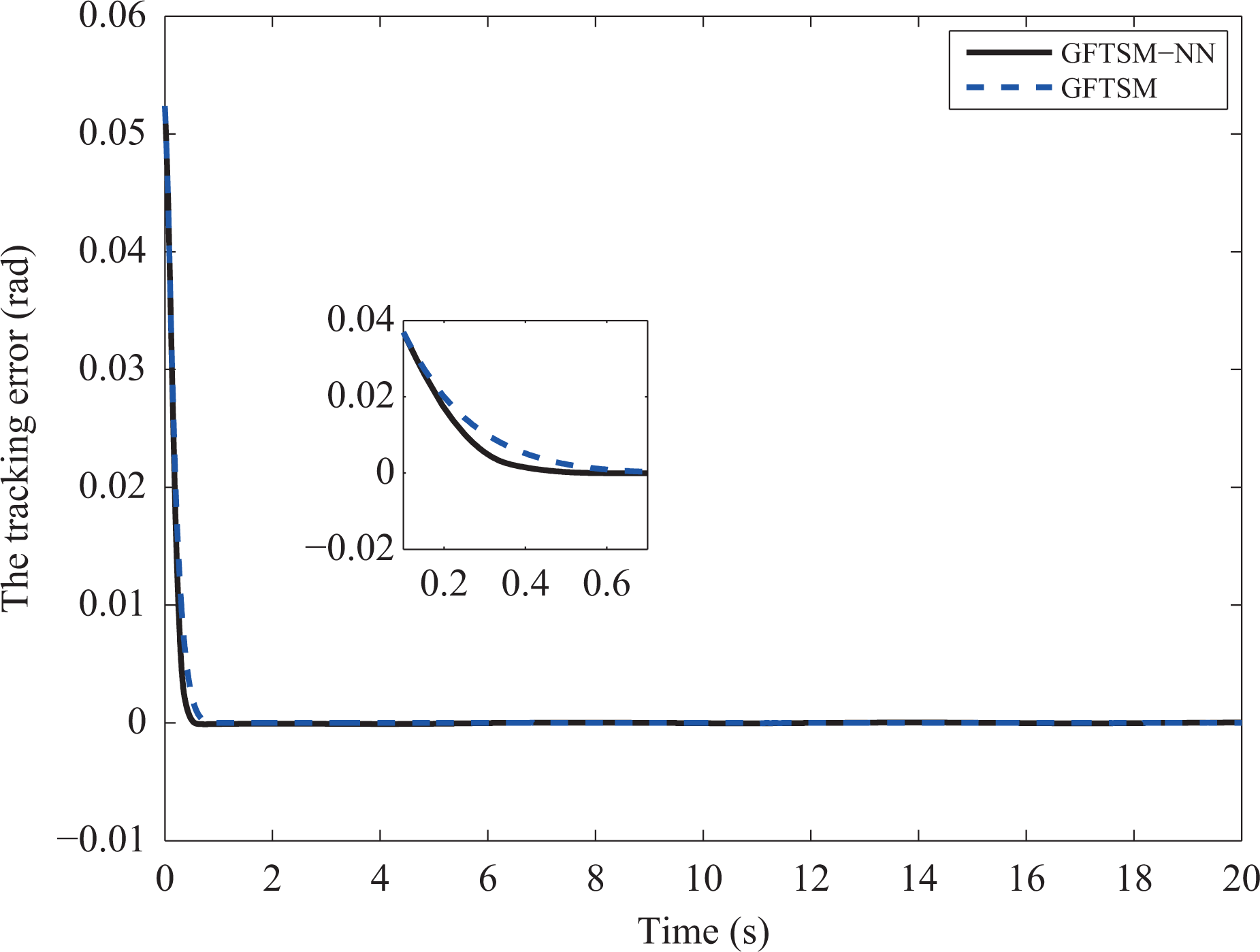
The tracking error of the heading angle (curve). GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The yaw rate tracking of the curve. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
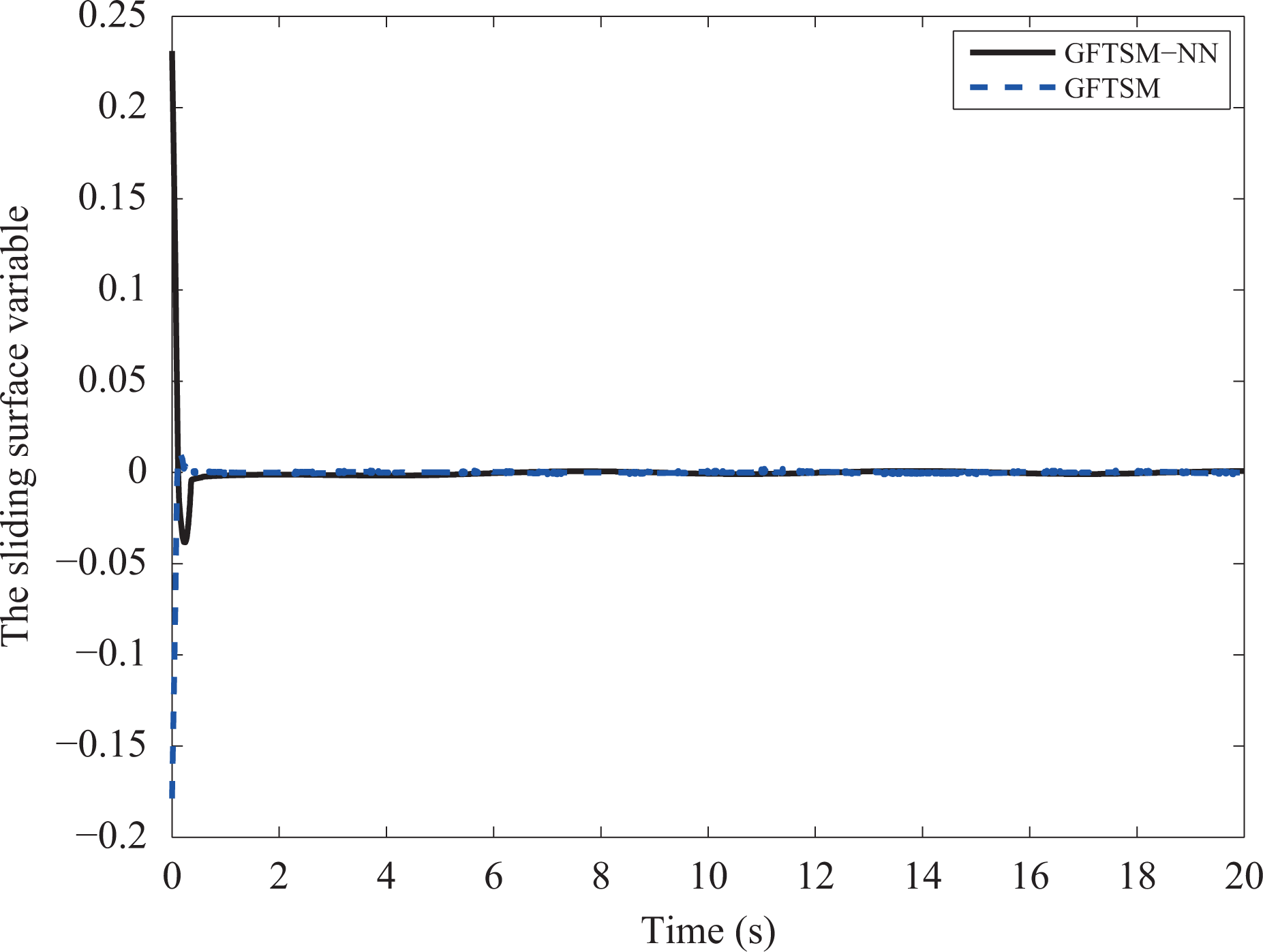
The sliding surface variable s of the curve tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
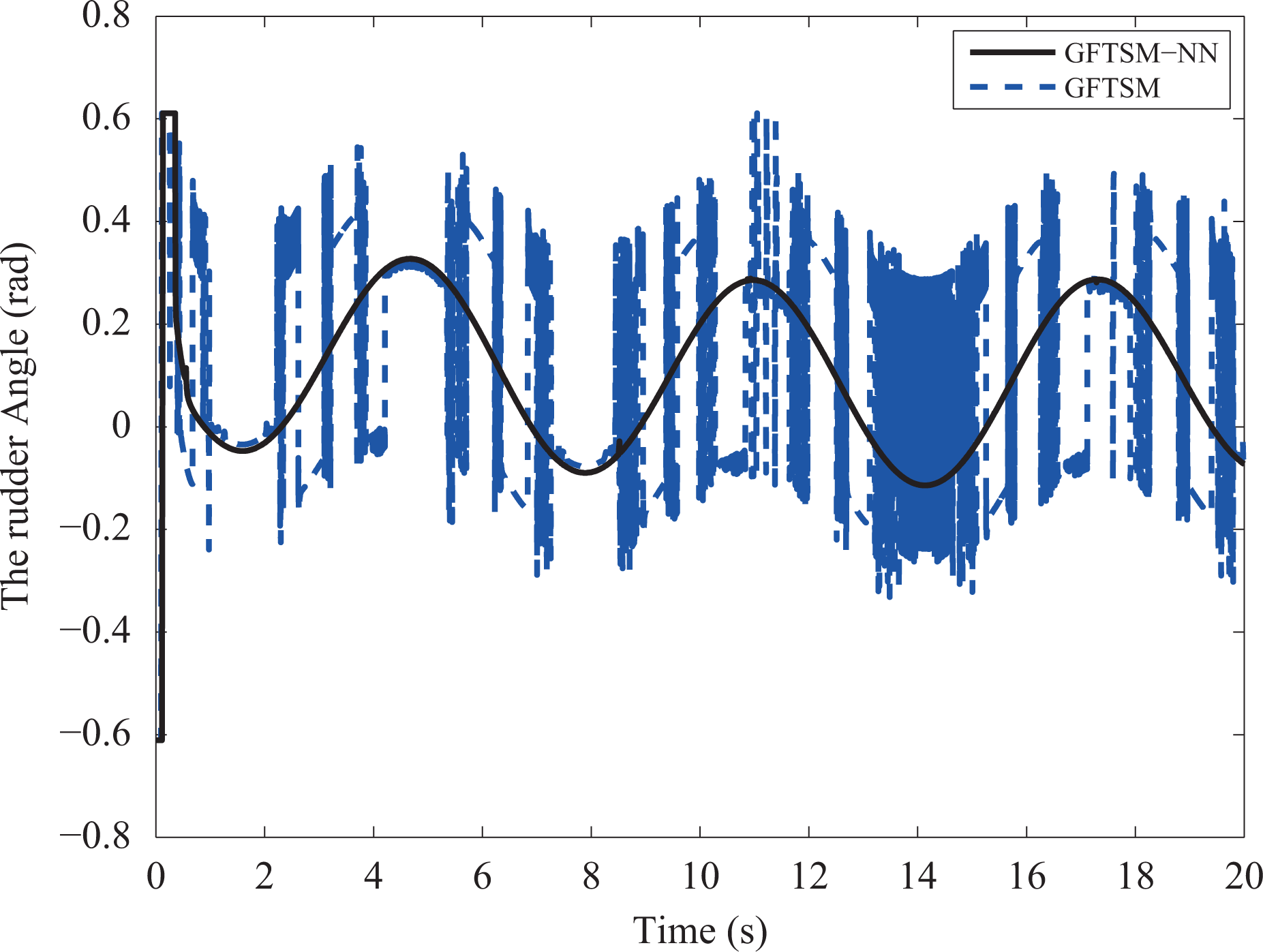
The rudder angle of the curve tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The equivalent control for the curve tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
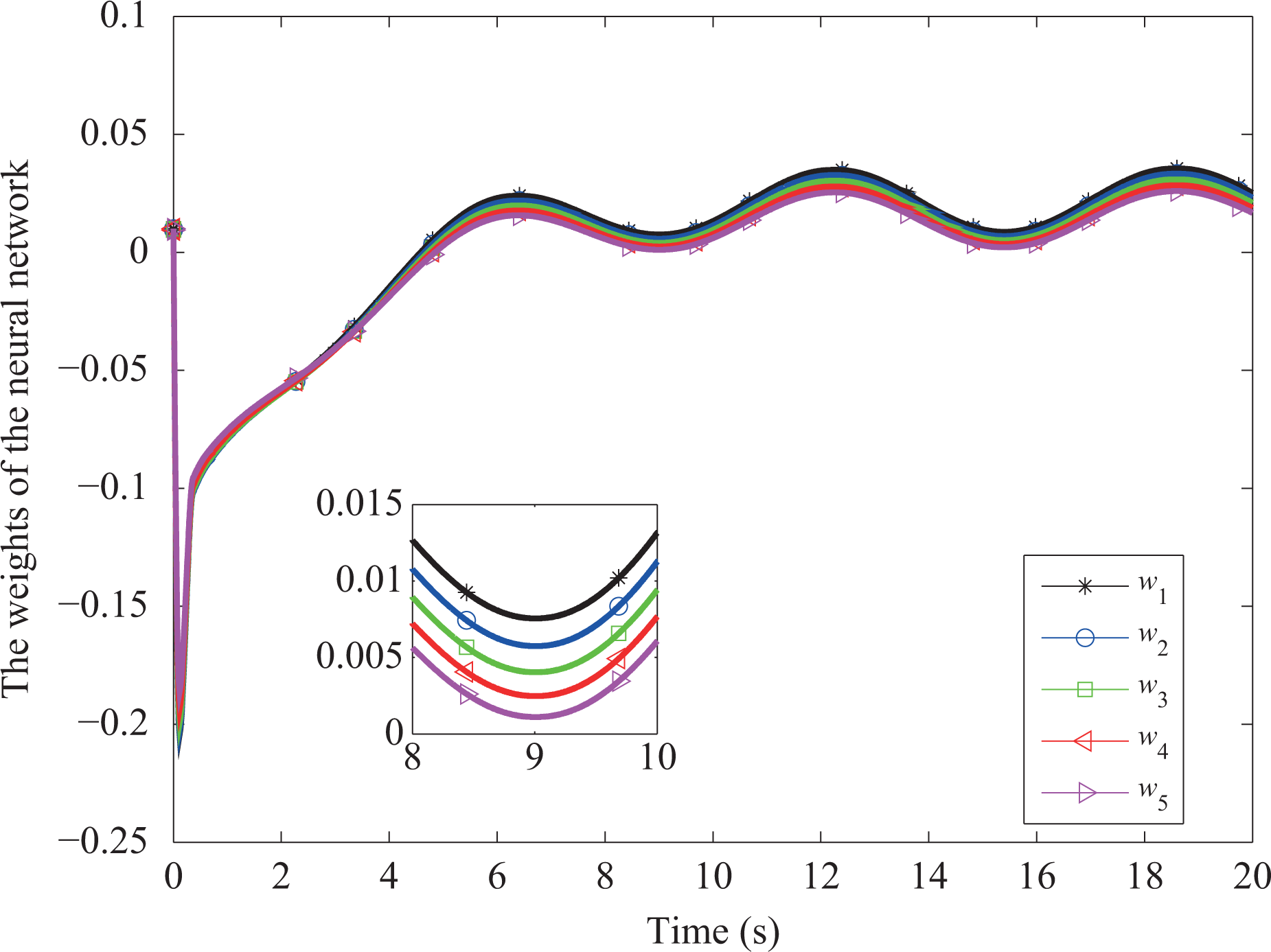
The weights of the neural network (straight line). GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The switch control of the curve tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.

The parameter γ of the curve tracking. GFTSM-NN: global fast terminal sliding mode controller based on RBF neural network; RBF: radial basis function.
Figure 16 depicts the rudder angles of the two control systems. It is chattering in the GFTSM controller and smooth in the GFTSM-NN controller, which is similar to the straight line tracking. Figure 17 depicts
Conclusions
An adaptive GFTSM-NN is proposed to realize the course keeping of USV with unknown disturbance and nonlinear uncertainty in this article. The equivalent control of the GFTSM controller is computed by the RBF neural network. It is adjusted online according to the adaptive law which is derived using the Lyapunov method to ensure the closed-loop stability of the system. A contrastive study of the proposed GFTSM-NN controller and the GFTSM controller is conducted. Compared with traditional GFTSM controller, the proposed GFTSM-NN controller is independent of the nonlinear dynamics of the system and free of upper bound of the external disturbance. Simulation results show that the proposed control system has a faster response speed than GFTSM control system and the system chattering is eliminated successfully.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.