
Abstract
To predict the manoeuvrability of unmanned marine vehicle and improve its manoeuvrability, the parameters of the manoeuvring model of unmanned marine vehicle need to be obtained. Aiming at the inconvenience of obtaining model parameters under the traditional experimental method, this article studies the parameter identification of unmanned marine vehicle’s manoeuvring model based on extended Kalman filter and support vector machine. Firstly, the second-order nonlinear manoeuvring response model of unmanned marine vehicle is discretized by the difference method, and the corresponding data are collected by the manoeuvring motion simulation of the response model. Secondly, the discrete response model is transformed into an augmented state vector based on extended Kalman filter, and the optimal estimation of the state vector is calculated to identify the parameters. And then, the discrete response model is transformed into a support vector machine-based regression model, the collected data are processed and a set of support vectors are obtained to further identify the parameters of the response model. Finally, by comparing the simulation experiments’ results from the original model and the identification model, the recognition results-based extended Kalman filter and support vector machine are analysed and some research results are obtained. The results of this article will provide a powerful reference for the design of unmanned marine vehicle’s motion control algorithm.
Keywords
Introduction
Unmanned marine vehicle (UMV), usually contained unmanned/autonomous underwater vehicle (UUV/AUV) and unmanned surface vessel (USV), is attracting more and more attention from researchers all over the world because of its extensive applications in military reconnaissance, homeland security, shallow-water surveys, environmental monitoring and coordinating with other unmanned system. 1 –3 Although much advancement have been realized in this area, the demand for more advanced navigation, guidance and control systems for UMVs continues to grow, as more and more vehicle autonomy is required. An accurate modelling of the dynamic response of the propellers/rudders used to control UMV is fundamental to obtain a meaningful simulation of the behaviour of the vehicle and, in particular, for the realistic simulation of the vehicle navigation and control systems. 4 –6
At present, the main methods of obtaining UMV model parameters are numerical calculation and model test. However, the accuracy of model parameters obtained by numerical calculation is not high, and the cost of model parameters obtained by model test is too high. Therefore, many researchers are trying to obtain UMV model parameters by system parameter identification method. 7 –9
A self-oscillation-based methodology is used to identify single degree of freedom nonlinear model parameters of UMV, extensive experiments have been carried out to prove that the method gives consistent results by Miskovic et al. 10 And then, a method of modelling and identification of yaw motion dynamic system model of an open-frame underwater vehicle is presented by Avila et al., and the integral method used is the classical least squares algorithm applied to the integral form of the dynamic system equations. 11 A planar motion modelling for an unmanned surface vessel (USV), including a comparative evaluation of several experimentally identified models over a wide range of speeds and planning conditions, is proposed by Sonnenburg et al. 12 To gain insight into hydrodynamic parameter experimental identification of open frame underwater vehicles, an experimental identification procedure is proposed by Avila et al. to determine parameters of uncoupled and coupled models. 13 The modelling and experimental identification of six different six-degree-of-freedom–coupled nonlinear second-order plant models is designed by Stephen et al., and the parameter estimation methodologies of ordinary least squares, total least squares and underdetermined total least squares were employed to identify experimentally the unknown plant model parameters. 14 Hydrodynamic coefficients of an AUV are estimated by Mohammad et al., the performance of two recursive state estimation algorithms, extended Kalman filters (EKF) and unscented Kalman filters (UKF), is explored for hydrodynamic coefficient estimation, and the results indicate that the UKF coefficient estimation method is faster than the EKF in terms of convergence time. 15 A novel system identification method, support vector regression, is proposed for identifying the nonlinear roll motion equation of a floating production storage and offloading vessel in regular waves by Hou et al. 16 A state variable filter and recursive least square-based method is designed by Eng et al. to enable online identification of AUV dynamics via in-field experiments, where the AUV is commanded to execute a compact set of manoeuvers under doublet excitation. 17 An online identification and adaptation of the controller is carried out using the hybrid neurofuzzy network approach for an AUV by Osama et al., and the methodology uses the input–output data to come up with a structure for the controller and optimal adaptation of the parameters to achieve the required accuracy. 18 Giorgio et al. perform parameter identification by resorting to a hybrid optimization approach where the characterization of the dual ambulatory strategies of the robot is performed in a segregated fashion. 19 Unknown system parameters are estimated using an adaptive parameter identifier, whose gains are optimized by particle swarm optimization (PSO) algorithm, and removing the trial and error procedure and ensuring the convergence property together with fast response are the benefits of such identification scheme proposed by Mousavian et al. 20 Based on the empirical data, symbolic regression method inspired by natural selection is conducted to automatically detect realistic structure and parameters of vehicle model, is completely general and does not assume any pre-existing models before identification and can be applied out of the box to any given vehicle experiment data. 21 The EKF, cubature Kalman filters (CKF) and transformed unscented Kalman filters (TUKF) are used to identify hydrodynamic model parameters of an AUV by Mohammad et al., and to verify and compare the three estimation filters with consideration of the predetermined hydrodynamic coefficients and spiral manoeuver AUV results, these three methods are evaluated. The results indicate that the TUKF identifies the best hydrodynamic model due to solving both the CKF non-local sampling problem and the EKF linearization problem. 22 In addition, there are many other papers that have done relevant or similar research. 23 –30
However, most UMV motion model parameter identification methods mainly focus on two-dimensional or three-dimensional motion models, and most of them are very complex and computational, which have some limitations in practical application. The rudder response model is one of the most important manoeuvrability models of UMV, as heading response is one of the most important indexes in the course of UMV navigation. At present, most of the parameters of course manoeuver response model are obtained by numerical calculation or experiment, but the accuracy of model parameters obtained by numerical calculation is not high, and the cost of model parameters obtained by model test is too high. On the basis of the above researchers, this article presents an EKF and support vector machine (SVM) method for identifying the course manoeuvrability response parameters of UMV, and the advantages and disadvantages of the two methods in the course manoeuvrability response model of UMV are analysed, which provides a reliable method for the parameter identification of the course manoeuvrability model of UMV.
The remainder of the article is organized as follows. In ‘Problem Formulation’ section, the parameter identification problem is described. The second-order nonlinear response model of UMV is discretized by forward difference method and then the second-order nonlinear response model of the UMV is transformed into a discrete system in ‘Discretization of UMV manoeuvring model’ section. And in ‘Simulation data collection’ section, the test data including heading angle, rudder angle and heading angular velocity are obtained. EKF method and SVM method are designed based on the UMV model for the UMV parameter identification, and some model are identified in
Problem formulation
At present, most of the research on parameter identification of manoeuvring response model is aimed at relatively simple first-order linear response model and first-order nonlinear response model. Considering the complex motion characteristics of the UMV, the first-order model can’t effectively describe the corresponding characteristics; so, in this article, we will do some research about the second-order nonlinear response model that are more accurate and complex. According to Shang and Zhang, 31 the second-order nonlinear response model of the UMV can be described as follows

where r, K, α, δ, δ r , respectively, represent heading angular velocity, rudder angle gain, Norbbin coefficient, rudder angle and balance rudder angle, and T1, T2, T3 are time constant.
For better motion control of the UMV, it is necessary to obtain the parameters of the manoeuvring response model. However, the traditional experimental method needs a lot of time and resources, and computational fluid dynamics simulation is time consuming. Therefore, the system identification method is convenient, efficient and has great advantages. So, firstly, do some manoeuvring motion experiment and collect the experimental data, include the heading angle and rudder angle, then process these data and use system identification algorithms to identify the parameters of the model.
Discretization of UMV manoeuvring model
The second-order nonlinear response model of UMV is discretized by forward difference method. And r can be expressed as follows

where ψ is heading angle, h represents data sampling period, and
Similarly, it can be obtained


Substitute formula (2) to (4) into the second-order nonlinear manoeuvring model (1). The results are as follows

Define the following intermediate variables

Then formula (5) could be expressed as follows

Thus, the second-order nonlinear response model of the UMV is transformed into a discrete system. And, the next step is designing the parameter identification method.
Simulation data collection
A set of second-order nonlinear manoeuvring model parameters are selected from the study by Zhang and Zou, 32 as follows:
Use the traditional fourth-order Runge–Kutta method to simulate and predict the manoeuvring motion of UMV. The 20° zigzag test is simulated using the manoeuvring model in Table 1, and the test data including heading angle, rudder angle and heading angular velocity are collected. The curve of the data is shown in Figure 1. Then substituting the data collected into formula (7), Yt and Ht are obtained.
Second-order nonlinear manoeuvring model parameters.


The 20° zigzag test simulation.
Parameter identification algorithm design
Parameter identification algorithm designed based on EKF
The general dynamic equations of discrete nonlinear systems can be expressed as follows

where the state variable
Motivated by the traditional EKF method, combining the recursive process of state estimation, the parameter identification algorithm could be designed as follows: A priori state estimation equation
Error covariance matrix equation
Kalman gain matrix equation
State estimation updating equation
Error covariance matrix updating equation





where the state transition matrix

The initial values of filtering initial value and filtering error variance matrix could be designed

In the above recursive process, the Kalman gain
Based on the characteristics of EKF for estimating state vectors and combining the element in

and

Define the system state transition matrix below

Then we can obtain the equation of state as follows

Define the observation matrix below

Then the observation equation could be transformed as follows

Thus, the second-order nonlinear response model is transformed into the corresponding state vector form of EKF. Substituting the data collected in Figure 1 into formula (6), Y
t
and H
t
could obtain, then
The initial values of state vectors x
1–x
7 are defined as 0.01, because the data are obtained by simulation, define the noise w, v as 0. Finally, the estimated value of x
2–x
7 in the state vector

Identification results of x 2–x 7. (a) Identification results of x 2–x 4 and (b) identification results of x 5–x 7.
And, the final identification values of x 2–x 7 are shown in Table 2.
Identification value of x 2–x 7.

The final identification results of the parameters could be obtained by solving equations (6) and (17), and then the final results are shown in Table 3.
Model parameter values based on EKF identification.
EKF: extended Kalman filter.
Parameter identification based on SVM
SVM, which could make the nonlinear system mapped from the original space to the high dimensional feature space, main function can be expressed as

where

Regression of the collected data based on SVM, and the regression data are

Then the constraints could be described as follows

where C is the penalty factor for error samples.
To deal with the objective function (24), define Lagrange function as follows

where
According to Karush–Kuhn–Tucher conditions

We could obtain the following expression

To solve the minimum value of formula (24), define the dual variables as follows

Substituting formula (28) into formula (29), while

The simulation data collected in Figure 1 are divided into two groups: 0–200 s and 200–400 s, and then substituting them into formula (7) will get training samples
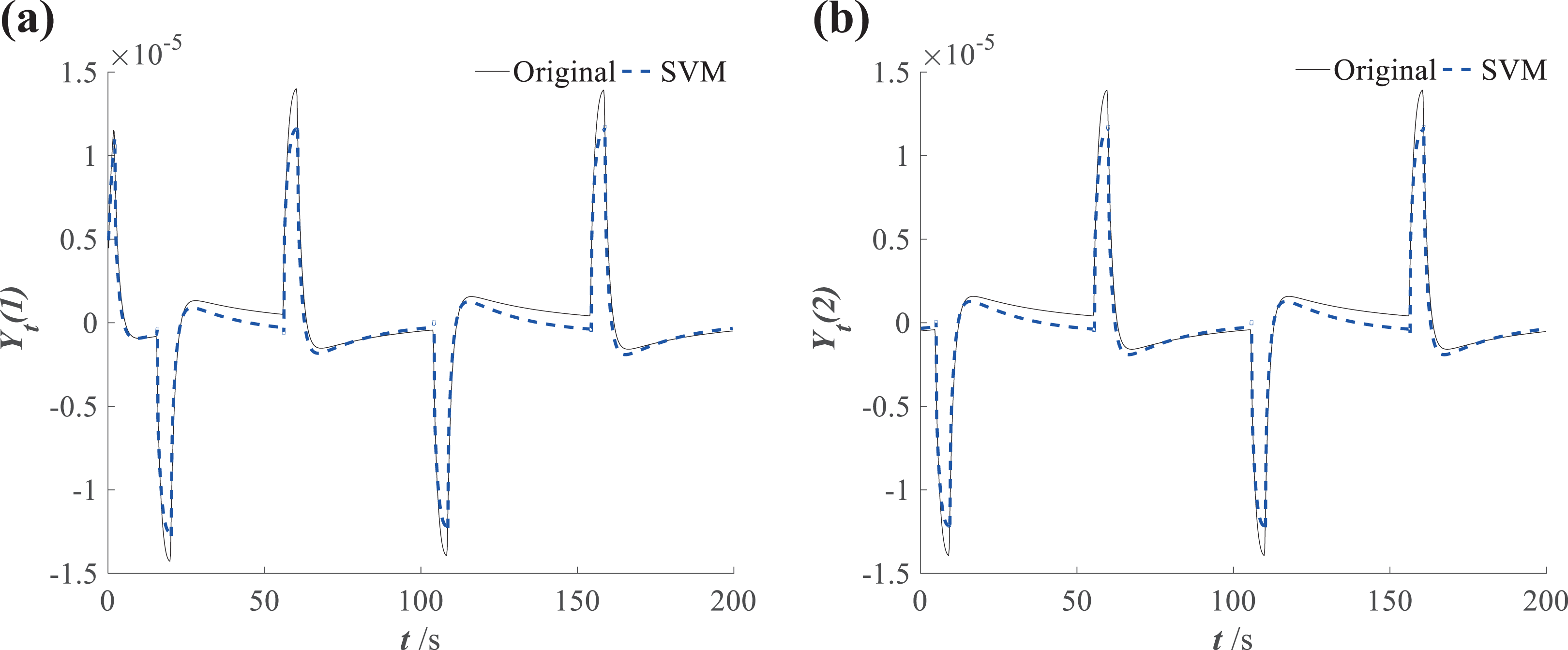
Output data comparison of SVM regression model. (a) Training samples and (b) inspection sample. SVM: support vector machine.
At the same time, we could get 150 support vectors

We could obtain

where
According to the identified values of each element in λ, by solving equations (6), the parameters of UMV manoeuvring model could be identified, and they are shown in Table 4
Model parameter values based on SVM identification.

SVM: support vector machine.
Comparison and analysis of identification results
Identification results and error analysis
The identified results of manoeuvring model parameters based on EKF and SVM are compared with the original parameters as shown in Table 5.
Comparison of identification results.

EKF: extended Kalman filter; SVM: support vector machine.
Table 5 shows that the identification results based on EKF are more accurate than those based on SVM. The identification result of

20° zigzag test simulation results with identified model. EKF: extended Kalman filter; SVM: support vector machine.
According to Figure 4, we can see that at the beginning of simulation, the identification model corresponds to a higher coincidence degree with the original model and the error is very small. With the increase of time, the distance between the corresponding curve of the identification model and the original data increases gradually. This is mainly because the identification results are not exactly the same as the original model parameters, which will inevitably lead to errors, while these small errors are acceptable in real application. At the same time, it could be found that the simulation results based on EKF identification model are more accurate than those based on SVM identification.
Analysis of generalization ability of identification model
To verify the generalization ability of the identification model, using the identified model in Table 5 to simulate the 10°, 30° zigzag test and the results are shown in Figure 5.

The comparison of zigzag test simulation. (a) 10°zigzag test simulation and (b) 30°zigzag test simulation. EKF: extended Kalman filter; SVM: support vector machine.
See from Figure 5, the zigzag test simulation with different rudder angles show that the model based on EKF identification can still get more accurate results, while the identification model based on SVM has larger error and poor generalization ability.
Considering that the UMV requires flexible manoeuvring, in practice, there are various complex manoeuvring motions. And, the rudder angle can not only obey the change rule of the standard zigzag test. To increase the diversity of rudder angle changes, this article uses sine manoeuvring motion simulation, so that the rudder angle is steering according to sine rule:

The comparison of sine manoeuvring motion simulation. (a) 5° sine manoeuvring motion, (b) 10° sine manoeuvring motion, (c) 15° sine manoeuvring motion, (d) 20° sine manoeuvring motion, (e) 25° sine manoeuvring motion and (f) 30° sine manoeuvring motion. EKF: extended Kalman filter; SVM: support vector machine.
Figure 6 shows that, for the sine manoeuvring motion, the generalization ability of the EKF identification model is always very good and still better than the SVM identification model.
Combining Figures 5 and 6, it can be found that the manoeuvring model identification results based on EKF is very good and better than that based on SVM. Considering that in the actual motion control process of UMV, the rudder angle will be changed in real time according to the requirement, so it could not be affected by accumulated errors, which shows that the identification model based on EKF can better serve the motion control of the UMV.
Conclusion
Parameter identification of UMV’s manoeuvring model based on EKF and SVM is addressed in this article. Two kinds of parameter identification methods are proposed for UMV manoeuvring model. By comparing the identification parameters with the original parameters and comparing the control response results of the identification model and the original model, the generalization ability of the two identification models was tested under different steering angles. Then, parameter identification results of the two methods are analysed and studied systematically, and the following research conclusions are drawn: Forward difference method could be well used to discretize the second-order nonlinear manoeuvring model of UMV, through the forward difference of the angular velocity and rudder angle, the transformed manoeuvring model that is easier to be parameter identified is obtained. By designing the observation equation and observation matrix, the EKF can realize the state parameter identification of the UMV manoeuvring model more effectively. After introducing the relaxation variable function and error sample penalty factor, the SVM parameter identification method has a general adaptability for this UMV model. Studies in this article show that the EKF method proposed has a better effect than the improved SVM in parameter identification of the UMV second-order nonlinear manoeuvring model. The EKF method is with higher identification accuracy and the identified parameter model has stronger generalization ability. The method proposed in this article could provide an effective and reliable model parameter identification method of UMV and could provide reliable research reference and technical support for UMV control system design.
Footnotes
Author's note
Zaopeng Dong is also affiliated to Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University, Harbin, Heilongjiang, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (NSFC) (grant no. 51709214, 51779052, 51809203, 51879210), China Postdoctoral Science Foundation (grant no. 2018M642941), Stable Supporting Fund of Science and Technology on Underwater Vehicle Laboratory (grant no. SXJQR2018WDKT001), Open Fund of Key Laboratory of High Performance Ship Technology (Wuhan University of Technology), Ministry of Education (grant no. gxnc18041404), Independent Innovation Research Fund of Wuhan University of Technology (grant no. 2017IVA006, 2018IVB069).