
Abstract
This article proposes a dynamic feedforward control method for a four-degree-of-freedom parallel robot in decoupling space to improve the control accuracy and robust stability. The mass matrix and the gravity component are obtained from the rigid-body dynamic model that is formulated by means of the link Jacobian matrices and the principle of virtual work. Then using the positive definiteness of the mass matrix and singular value decomposition algorithms, a decoupling transformation matrix is obtained to convert the physical joint space to the decoupling modal space. In the modal space, a decoupling closed-loop controller design has been implemented for each driven leg. Afterward, by applying the gravity component of the dynamic model, a feedforward control subsystem has been designed to compensate the influence of gravity load on the parallel robot, which can further reduce the negative impacts caused by modeling inaccuracies. This numerical simulation analysis shows that the ideal control accuracy and robust stability have been achieved using the dynamic feedforward decoupling control method for the nonlinear and strongly coupled systems of the parallel robot. The described controller has a simple structure and can be easily realized in practice.
Keywords
Introduction
Compared with serial robots, parallel robots have potential advantages of high precision, high stiffness, and heavy load capacity, so they have been widely applied in machine tools, motion simulators, high speed operation, and so on. 1 –5 Due to the simplicity in design and versatility in application, 6,7 the control of low-mobility parallel robots has attracted lots of attention. There are several challenges for the controller design of parallel robot.
For the control of parallel mechanism, the traditional way is based on the kinematics model of the mechanism and its pose control is proportional–integral–derivative (PID) control that is composed of three loops, including position loop, velocity loop, and current loop. However, because of the coupling of its branching drives, the controllers can interfere with each other and cannot be controlled independently. Therefore, it is difficult to optimize the control performance of the controller. In addition, the uncertain disturbances and un-modeled dynamics make it even more difficult to control.
At present, there are two popular methods for the control of multivariable systems, one is directly optimizing multivariate of the system which is represented by predictive control and the other is a decoupling method. 8 Predictive control has the ability to explicitly deal with constraints, and this ability comes from its prediction for the system’s future dynamic behavior based on the model. However, its application is relatively complex and requires heavy calculation. 9 Decoupling control is a practical and popular method these years, and its basic idea is to design a decoupling compensator to make the transfer function matrix of the generalized system composed of the decoupling compensator and the controlled object into a diagonal matrix, thereby decoupling multivariable systems into independent single-variable systems. 10 This design approach is gaining more and more attention and generally combines with other advanced control methods such as adaptive control, 11,12 neural network, 13 –17 dynamic feedforward, 18 fuzzy logic, and sliding mode 19 and have obtained higher tracking accuracy and better robustness.
To obtain better performance of parallel robot in motion control, model-based control is necessary and effective. 20,21 The influence of nonlinear dynamic behavior is considered in the model-based control, unlike in the traditional kinematic control method, 22 so the control system model is much more consistent to the actual running conditions. Modal space control 23 –26 can realize the transformation from joint space control to modal decoupling space control. The control requires an accurate dynamic model to obtain the transform matrix while not considering the impact of other dynamic factors such as gravitation on the parallel robot.
This article proposes a dynamic feedforward decoupling control approach for a four-degree-of-freedom (4-DOF) parallel robot that generally work in low-speed and heavy-load condition, aiming to improve the motion precision and robustness performance in real-time control. The article is organized as follows: the 4-DOF parallel robot is explained in the second section. The electromechanical system, including the rigid-body dynamic model of the parallel robot and the drive system, is proposed in the third section. In the fourth section, the decoupling closed-loop control subsystem and the dynamic feedforward control subsystem are designed respectively. The detailed performance analysis is presented and discussed in the fifth section. Finally, conclusions are given in the sixth section.
A 4-DOF parallel robot
A 4-DOF parallel robot is shown in Figure 1. It consists of a moving platform, a base platform, three external limbs with U
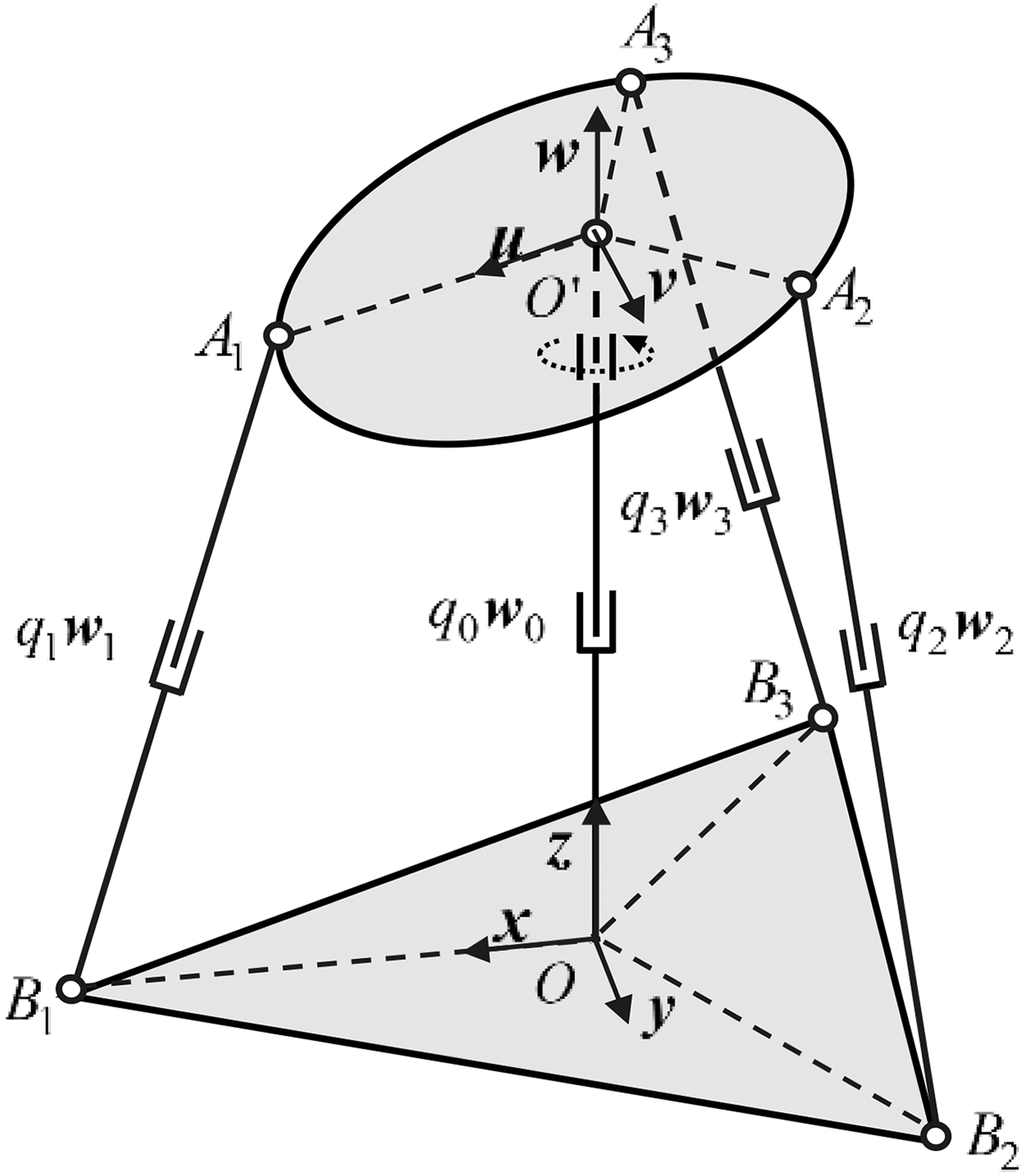
Schematic diagram of the 3U
The reference coordinate system

where
The orientation of each kinematic leg with respect to the fixed base can be defined by two Euler angles. As shown in Figure 2, each link consists of a piston and a cylinder. The local coordinate system of the ith limb can be thought of as a rotation of ϕi about the z-axis resulting in a


The ith limb and its local coordinate system.
The unit vector along the ith leg in the coordinate system
Therefore, the Euler angles φi and φi can be calculated by the following

System model
Dynamics model of parallel robot
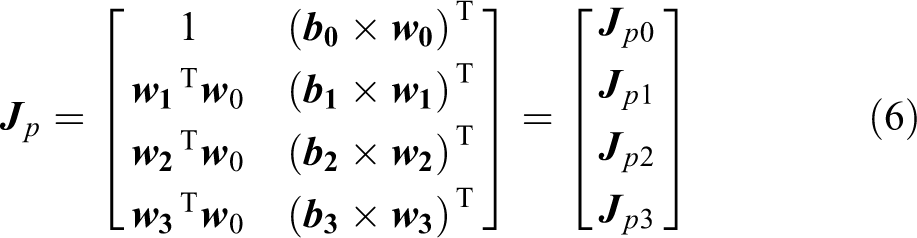
By virtue of the link Jacobian matrices and the principle of virtual work, the rigid-body dynamic model of the 3U
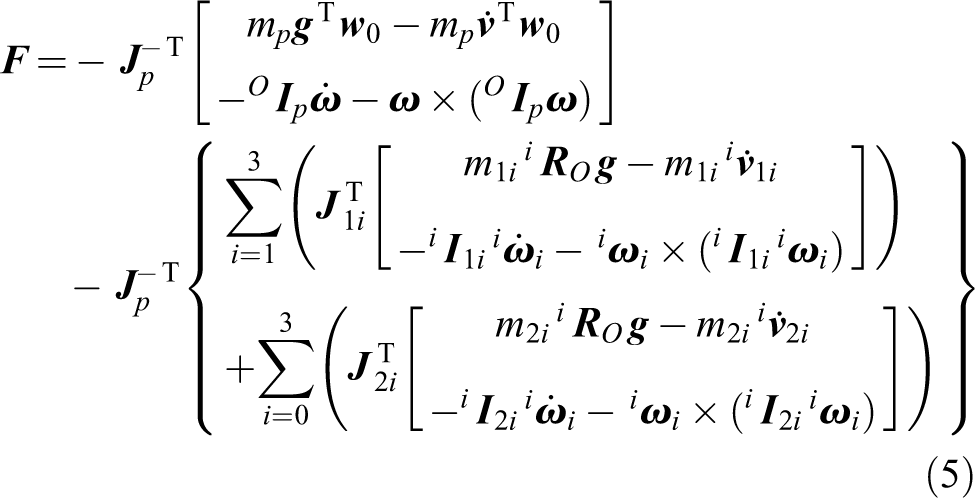
where
















Substituting equations (17)
to (22) into equation (5), the dynamic model of the 3U

where


From equation (24), the mass matrix is determined by the pose of parallel robot when the structural and inertial parameters are assigned.
Model of motor–robot system
The input links of the parallel robot are driven by four permanent magnet direct current (DC) motors by means of four lead screws. Desired tracking control can be obtained by controlling armature voltage of the DC motors.
The torque and voltage equations of the DC motor can be written as follows


where T denotes the torque of the DC motor, Kt denotes the motor torque constant, ia denotes the armature current of the DC motor, vi denotes the armature voltage of the DC motor, La denotes the motor armature inductance, and Ra denotes the motor armature resistance.
The linear motion of the limb of the robot is implemented using rotary motor with lead screw. The force output is

where p denotes the screw lead, and Kq denotes the transmission ratio.
From equations (26) to (28), the output force of the limb of the robot can be written as following equation by taking the Laplace transform

where U denotes the controlling armature voltage after transformed.
Dynamic feedforward decoupling control design
To improve the dynamic response performance of the parallel robot control system and eliminate the influence of the nonlinear and coupling dynamic characteristics, the dynamic feedforward decoupling control method is designed based on the proposed dynamic model.
The traditional kinematic control system of the parallel robot adopts position loop, speed loop, and current loop control as a three-ring system control strategy for each limb in the joint space. The scheme is shown in Figure 3, where P-LC, V-LC, and C-LC, respectively, represent position loop control, velocity loop control, and current loop control, respectively. However, this kind of control structure has an unavoidable problem that cannot be independently adjustable for each control chain of the parallel robot due to the presence of dynamic coupling effects.

Kinematic closed-loop control scheme.
As shown in Figure 4, the dynamic feedforward decoupling control method proposed in this article contains two subsystems. One is the decoupling closed-loop control subsystem. The other is the feedforward control subsystem, which can effectively compensate for the influence of the gravity component of the parallel robot. In the third section, we can see that the pose of the parallel robot largely decides the dynamic coupling action, so we need to redesign the position loop controller. By adding the modal matrix and its inverse matrix under the original kinematic control frame, the design space of the position loop controller can be mapped from the joint space to the decoupling modal space, where the parallel robot can be viewed as four mutually independent single input single output systems.

Dynamic feedforward decoupling control scheme.
Design of the decoupling closed-loop control subsystem
It should be noted that the velocity component in the actuating forces is not the dominating one, 27 so we regard it as an unknown disturbance which is not included in the design of the control model. Besides, the influence of the gravity component can be easily alleviated by way of the feedforward compensation. 18 Therefore, the dynamic differential equation of the parallel robot in equation (23) is rewritten as

where
The linear actuator can be viewed as a viscous damping system, thus the control input of the ith driving joint can be expressed as

where Bc denotes the viscous damping coefficient of the linear actuator.
Taking into account the parallel robot with four driving electric cylinders, equation (31) can be assembled as

where
Substituting equation (30) into equation (32), we get

The studied 3U

Substituting equation (29) into equation (34), the dynamic coupling equation for the parallel robot can be written as

It is shown in equation (35) that the coupling effect between the actuated joints has always existed in the electromechanical system because the mass matrix

where
Substituting equation (36) into equation (35), we obtain

Left multiplying both sides of equation (37) by

After setting modal displacement

The matrix

Then, using the modal matrix

where
According to the above analysis, the position loop controller is designed in the modal decoupling space, as shown in the closed-loop part of Figure 4. In this subsystem, the velocity loop controller, the current loop controller, and the parallel robot are regarded as the control object, and these two controllers have been turning well. The modal input and the modal feedback signals of each branch of the parallel robot are transformed from the input signals and feedback signals by matrix transformation. The errors of these modal variables are the control signals of the position loop controllers. After the transformation of the transposed modal matrix, the output of position PID controllers became the control signals of the control object in physical space. Hence, the decoupling control has been realized for the closed-loop subsystem of the parallel robot.
Dynamic feedforward control subsystem
To further improve control accuracy, the dynamic feedforward compensation is designed for the parallel robot in this section. In Figure 4, the gravity component including the gravity of the load, moving platform, limbs are applied to compensate for the impact of gravity on the parallel robot.
Before being input to the current loop control, the feedforward controller is needed to convert the signals of the gravity component for each channel of the parallel robot. To reduce the influence of gravity, the converted signals should be equal to the gravity component of the parallel robot when they arrive at the point where the torque of electric cylinders is outputted. The subsystem block diagram is shown in Figure 5, and the control parameters of this subsystem are illustrated in Table 1. So, the transfer function of the feedforward controller can be expressed as

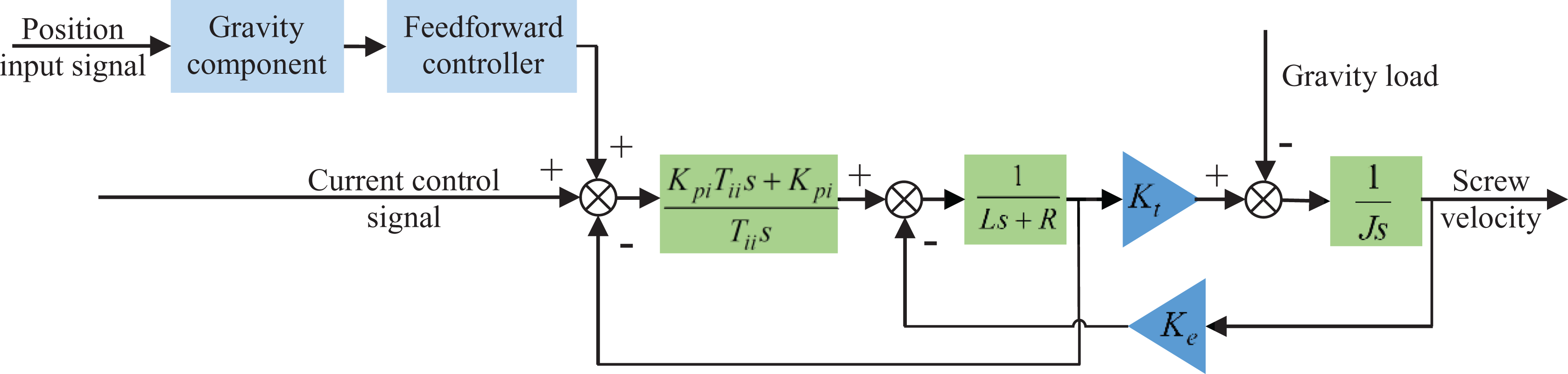
Scheme for dynamic feedforward control subsystem.
The variables mentioned in the dynamic feedforward control subsystem.
PI: proportional–integral.
It should be noted that the steady-state error of the dynamic control system is mainly caused by the gravity load in the view of the dynamic model of parallel robot, since the acceleration component and velocity component of the dynamic model are quite small in the steady state. Therefore, the addition of the dynamic feedforward control subsystem can availably improve both the transient and steady performance of the parallel robot control system.
Performance analysis
To validate the effectiveness of the designed control system, the performance analysis is demonstrated by running numerical simulation. The control system model is established by MATLAB®/Simulink [version: 2016a, MathWork], and the rigid-dynamic model of the parallel robot is set by the module of the SimMechanics in Simulink. The traditional kinematic control is used as a comparison to estimate the control performance of the proposed control system. The main dynamic parameters of the parallel robot are shown in Table 2.
Parameters of the 4-DOF parallel robot.

DOF: degree of freedom.
Before running the simulation model, the controllers were adjusted. The PID control gains of the position loop controllers are adjusted to
The step responses of the dynamic feedforward decoupling controller (DFDC) are applied by comparing with the traditional kinematic controller. The experiment results are shown in Figure 6. With the action of the DFDC, the rise times are 0.108 s, 0.130 s, 0.129 s, and 0.095 s in heave, pitch, roll, and yaw, respectively, and the steady-state errors are 0.060 mm, 0.013°, 0.011°, and 0.008°. However, with the traditional kinematic controller, the rise times are 0.175 s, 0.188 s, 0.213 s, and 0.167 s, respectively, and the steady-state errors are 0.251 mm, 0.035°, 0.046°, and 0.032°. It is obvious that the designed control strategy can remarkably improve control rapidity and accuracy in all directions.
Responses to desired step inputs of traditional PID and DFDC. PID: proportional–integral–derivative; DFDC: dynamic feedforward decoupling controller.
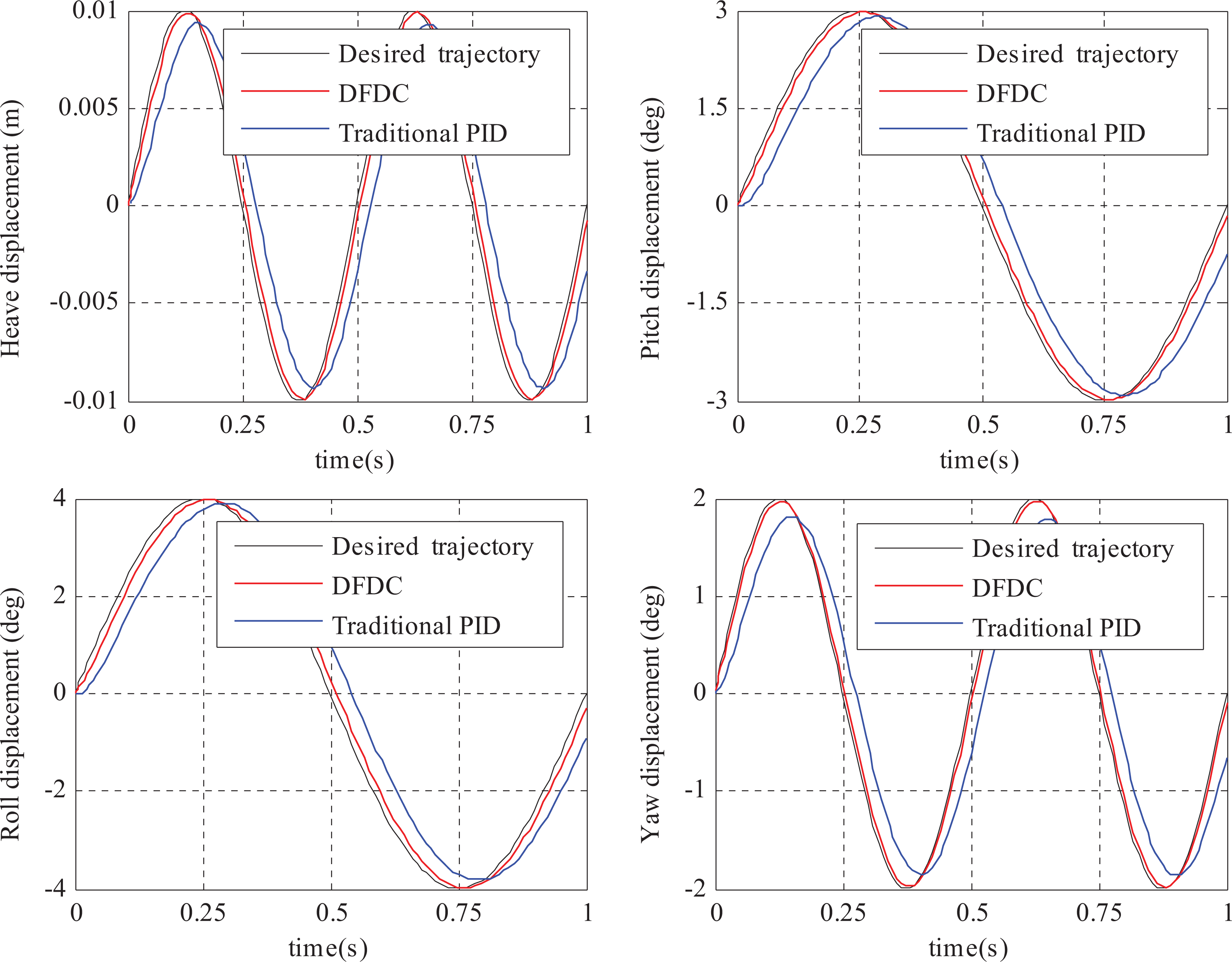
Figure 7 shows the tracking trajectory of the parallel robot under the desired sinusoidal inputs along four directions (heave: 0.01m/1 Hz, pitch: 3°/1 Hz, roll: 4°/1 Hz, yaw: 2°/2 Hz). As shown in Figure 7, the dynamic tracking performances of the designed controller are obviously superior to the traditional PID controller. The tracking errors are less than ±1.5 mm, ±0.16°, ±0.30°, and ±0.12° in heave, pitch, roll, and yaw, respectively. But they reach ±4.7 mm, ±0.75°, ±0.93°, and ±0.70° with the traditional PID controller.

Responses to desired sinusoidal inputs of traditional PID and DFDC. PID: proportional–integral–derivative; DFDC: dynamic feedforward decoupling controller.
As indicated by the above experiments, the 4-DOF parallel robot with DFDC can achieve high tracking performances with faster responses and smaller tracking errors, thus verifying the effectiveness of the proposed control strategy.
Conclusions
In this article, a dynamic feedforward decoupling control has been designed for a 4-DOF parallel robot, which has strongly nonlinear dynamic characteristics in its physical space to provide an accurate and steady control strategy. The rigid-body dynamic model has been achieved based on the link Jacobian matrices and the principle of virtual work. By fully utilizing the properties of the model mass matrix, the decoupling matrix is obtained to transform the parallel robot from the joint space to modal space, so that we could design multiple independent control subsystems for the parallel robot. Meanwhile, the feedforward control subsystem has been designed to alleviate the impact caused by the gravity load of the parallel robot. Finally, the dynamic feedforward control in decoupling space for the parallel robot is verified by simulation experiment. From this research, we draw the following conclusions:
The dynamically coupled parallel robot can be transformed into multiple mutually independent single input single output control systems, by redesigning the position loop controller in the modal decoupling space. With the elimination of the coupling effect between the actuating joints, the control system of each actuating joint can achieve better performance than it did in the physical joint space. Meanwhile, the three closed-loop control subsystem can effectively restrain the influences caused by the modeling uncertainties and disturbance inputs.
By augmenting the dynamic feedforward control subsystem to compensate for the gravity load of the parallel robot, the response performance is further improved, especially for steady-state response, because the gravity load is the main source of control error when the dynamic parallel robot system is stable.
The feedforward compensation has no effects on the stability of the closed-loop control system because the control subsystems are independent. The experiments show that the control problem for the parallel robot that lies in the nonlinear dynamic characteristics with time varying and coupling has been solved by the proposed control strategy. Hence, the dynamic feedforward decoupling control is feasible and effective for the parallel robot.
Footnotes
Acknowledgements
The authors would also like to thank the anonymous reviewers for their very useful comments.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of following financial support for the research, authorship, and/or publication of this article: The research is jointly supported by the National Natural Science Foundation of China (grant no. 51375288), the Department of Education of Guangdong Province (grant no. 2017KZDXM036).