
Abstract
Parallel robots are nowadays used in many high-precision tasks. The dynamics of parallel robots is naturally more complex than the dynamics of serial robots, due to their kinematic structure composed by closed chains. In addition, their current high-precision applications demand the innovation of more effective and robust motion controllers. This has motivated researchers to propose novel and more robust controllers that can perform the motion control tasks of these manipulators. In this article, a two-loop proportional–proportional integral controller for trajectory tracking control of parallel robots is proposed. In the proposed scheme, the gains of the proportional integral control loop are constant, while the gains of the proportional control loop are online tuned by a novel self-organizing fuzzy algorithm. This algorithm generates a performance index of the overall controller based on the past and the current tracking error. Such a performance index is then used to modify some parameters of fuzzy membership functions, which are part of a fuzzy inference engine. This fuzzy engine receives, in turn, the tracking error as input and produces an increment (positive or negative) to the current gain. The stability analysis of the closed-loop system of the proposed controller applied to the model of a parallel manipulator is carried on, which results in the uniform ultimate boundedness of the solutions of the closed-loop system. Moreover, the stability analysis developed for proportional–proportional integral variable gains schemes is valid not only when using a self-organizing fuzzy algorithm for gain-tuning but also with other gain-tuning algorithms, only providing that the produced gains meet the criterion for boundedness of the solutions. Furthermore, the superior performance of the proposed controller is validated by numerical simulations of its application to the model of a planar three-degree-of-freedom parallel robot. The results of numerical simulations of a proportional integral derivative controller and a fuzzy-tuned proportional derivative controller applied to the model of the robot are also obtained for comparison purposes.
Introduction
Parallel robots are nowadays used in many high-precision industrial tasks, such as machining, 1,2 welding, 3,4 packaging, 5,6 as well as flight simulators 7 and telescopes. 8,9 These high-precision applications demand the implementation of position regulators, for point-to-point motion tasks, and tracking controllers, when the end-effector motion has to follow a prescribed trajectory of motion. 10 Moreover, parallel robots consist of closed kinematic chains that can be modeled, roughly speaking, as a collection of open kinematic chains in which their extremes (at the end-effectors) are joined together. 11 This parallel structure can be mathematically represented as a dynamic model of a serial robot plus a set of holonomic constraints. Therefore, as it will be explained later, the dynamic model of parallel robots has inherently a more complex structure than the dynamic model of serial robots. This has led researchers in robot control to conceive more robust controllers to cope with inaccuracies and parameter uncertainties that may exist in the dynamic models of parallel robots. Hence, we can see that the development of trajectory tracking controllers for parallel robots is nowadays an important and interesting problem.
Recent approaches for control of parallel manipulators found in the literature include model-based controllers 12,13 and not model-based controllers. 12,14,15 In the study by Ren et al., 12 a comparison of several control approaches for robot tracking of a three-degree-of-freedom (3-DOF) parallel robot is presented. They compare the performance of an adaptive controller, a proportional integral (PI)-type synchronized controller (model-based), a conventional proportional integral derivative (PID) controller, and an adaptive synchronized controller (not model-based controller). In Diaz-Rodriguez et al.’s 16 work, a reduced model-based control of a 3-DOF parallel robot is proposed. The reduced model is obtained by considering a simplified model with a set of relevant parameters. In the study by Borbonnais et al., 13 a computer torque controller and a conventional PID controller are implemented for a novel five-bar parallel robot.
An interesting two-loop control scheme is proposed by Kelly and Moreno 17 for motion control of manipulators in operational space. The proposed scheme is composed of a joint velocity inner loop and an operational space kinematic control outer loop. The motivation of the cited work is the fact that in many industrial robots the motion control of each joint is performed using inner joint velocity control loops and outer position control loops. 17 –19 In addition, it is shown that the overall closed-loop dynamics of the two-loop control scheme can be seen as a cascade system, and it presents sufficient conditions for the Global Exponential Stability of the closed-loop systems. Inspired by Kelly and Moreno’s work, 17 Soto and Campa 20 proposed a two-loop control scheme for redundant manipulators. In such a scheme, an outer kinematic controller generates the joint velocity commands for an inner velocity controller for each joint of the manipulator. A recent application of a two-loop motion control scheme for a parallel robot is reported by Campa et al., 21 where a kinematic model-based operational space tracking controller with a two-loop structure for a hexapod-type parallel robot is proposed. The two-loop structure contains a Resolved Motion Rate Controller (RMRC) in the outer loop and a joint velocity PI in the inner loop.
On the other hand, not model-based controllers are not sensitive to model uncertainties or inaccuracies. This can be an important advantage when dealing with the dynamic model of parallel robots, which have inherently a more complex structure than the dynamic model of serial robots, as it was pointed above. Regarding classic not model-based controllers, such as PD or PID, these can improve their robustness when used in variable gains schemes or when a nonlinear function of the error is added. In these schemes, either the controller gains or some nonlinear control action are set-up online according to a measure of the performance of the controller. In the study by Salinas et al., 15 a family of nonlinear PID-like controllers is proposed in which an integral action of a nonlinear function of the position error is added to the control signal. Recent approaches of variable gains control schemes for parallel robots include 14 in which a discrete-time motion controller is proposed. In such work, the output of an Adaptive Neuro-Fuzzy Inference System is used in the control law in addition to a conventional PID controller. In Villareal-Cervantes and Alvarez-Gallegos’ work, 22 a PID control off-line tuning scheme using Evolutionary Algorithms is proposed. The scheme is tested on a planar parallel robot with a five-bar mechanism. In Ouyang et al.’s work, 23 a nonlinear PD control for a parallel manipulator system is proposed, in which the P and D gains are certain class of nonlinear bounded functions of the position error. In the study by Zhu and Zhang, 24 a fuzzy-tuned PID control strategy is proposed for regulation control of a parallel robot. In Stan et al.’s work, 25 a fuzzy controller performs the fine tuning of the gains of a PID controller. A coarse tuning of these gains is previously done. The fuzzy controller is applied to a Cartesian parallel robot of 3-DOF known as ISOGLIDE. In another related recent work, 26 a fuzzy-PID controller is designed for control of a 6-DOF hydraulically driven parallel robot. The PID gains are tuned by a conventional fuzzy algorithm which uses the joint position errors and its temporal derivatives as input variables. However, stability analysis of these variable gains schemes for not model-based controllers for parallel robots have not been reported in the literature. The stability of the resultant closed-loop system is an important concern in the design process of controllers for manipulators.
Given the larger complexity of the dynamic models of parallel robots, and the need of improved robustness of the controllers before parameter variations or uncertainties, in this work, we propose a novel design of a two-loop P-PI controller for tracking control of parallel manipulators. The outer loop is a joint position P control loop, and the inner loop is a joint velocity PI control loop. The gains of the inner PI control loop are constant, while the gains of the outer P control loop are tuned by a self-organizing fuzzy (SOF) algorithm, which is a novel algorithm that generates the gain depending on the current tracking errors. This algorithm employs a set of fuzzy rules that can be updated online according to a performance index of the controller response. This gain tuning scheme provides the needed increased robustness in presence of perturbations and parameter uncertainty of the overall controller, as well as improved results when it is tracking fast changing trajectories. The usefulness and performance of the proposed controller is tested by numerical simulations, in comparison with two controllers, a PID controller, and a fuzzy-tuned PD (FPD) controller. Moreover, the stability analysis of the closed-loop system is carried out, giving as a result the proof of the Uniform Ultimate Boundedness of the solutions of the closed-loop system.
The main contributions of this work are the design and the stability analysis of a tracking control structure based on a two-loop scheme composed of two not model-based controllers, that is, P and PI. In addition, the gains of the P control loop can be tuned online. Moreover, the P-gain tuning is performed by a novel SOF algorithm. Furthermore, the stability analysis of the resulting closed-loop system is carried out. It is worth to mention that the result of the stability analysis holds for any tuning algorithm for tuning the P gains, by only ensuring that some conditions on the boundedness of the produced gains are satisfied. Therefore, this is a general result for a family of two-loop P-PI tracking controllers in which the P gain of the outer control loop is variable. According to the best knowledge of the authors, this is an original result not published before elsewhere.
The remaining of this article is organized as follows. In the “Preliminaries” section, the dynamic model of the parallel robot as well as some of their properties useful for the stability analysis are described. In the section “Proposed controller,” the full description of the proposed controller is given. In section “Stability analysis,” the development of the stability analysis in the sense of Lyapunov of the closed-loop system is carried out, and the result of this analysis is presented. In section “Simulations,” the elements of the dynamic and kinematic model of a 3-DOF parallel robot are described as well as the desired trajectory for simulations. Also, the numerical simulations conducted are presented and discussed. Finally, some concluding remarks are given.
Preliminaries
Notation
In this work, vectors are denoted with italic-bold lowercase letters, for example,
Dynamic model of the robot
The joints of a parallel manipulator can be classified as n actuated joints, represented by vector

with

where
Kinematic transformation
Let us define a kinematic transformation between vectors

to obtain a so-called reduced dynamic model. Notice that the matrix

The derivative with respect to time of equation (2) is

By substituting

After multiplying equation (4) by

where the term with the product of the Jacobian matrix of the constraints by the Lagrange multipliers vanishes because it belongs to the null space of

equation (5) can be rewritten as

In Ghorbel et al.’s work,
11
it is proven, by means of the implicit function theorem, that there exists a unique parametrization of

for any
In addition, Muller
28
established that, for a parallel machine, a subset

where
In consequence, without loss of generality, we can write down the matrices of the dynamic model

where
Property 1
M(
Property 2
Property 3
There exists a constant
Property 4
For robots with only revolute joints, there exists a constant
Proof
For robots with only revolute joints, the entries of the vector of gravitational forces
Proposed controller
In this work, we propose a controller for trajectory tracking of parallel manipulators. The structure of the proposed controller is a two-loop cascade structure, with a P position controller in the outer loop and a PI controller in the inner loop. The overall structure of the controller is shown in Figure 1. Note that the desired joint position and velocity vectors


Proposed controller. SOF: self-organizing fuzzy.
Notice that

where
In the inner loop, the control law can be written as

where



where
SOF controller
The proposed algorithm for tuning the gains of the outer P loop is a novel SOF controller. This controller generates the gains based on the current position and velocity errors. The performance of the overall control strategy is evaluated to produce a performance index. This parameter is then used to adjust the parameters of the membership functions of the system to obtain an improved control signal. In a fuzzy controller, the membership functions are functions that map a crisp input variable to a membership grade that can take continuous values in the interval

Simplified structure of the SOF controller. SOF: self-organizing fuzzy.
Input stage
A block diagram of the structure of the input stage is shown in Figure 2. In this stage, two processes are performed: scaling and quantization, to normalize the levels of input signals before passing them to the following stage. The scaling is done by multiplying by a scaling factor. Next, the scaled signal is subject to a quantization process by mapping it into two sets of discrete values
On the other hand, the output signals from fine quantization of

Structure of the input stage.
Fuzzification
The fuzzy membership functions selected are triangular shaped functions, with constant width and adjustable central values. These functions are shown in Figure 4. These central values are considered as the inference rules of the fuzzy mechanism. When crisp values

Fuzzification of discretized errors.

Defuzzification
Defuzzification is carried out by the Mean of Maxima algorithm. In this algorithm, the two greatest values of vector

where
Performance index table
Performance index values are generated according to the current position and velocity error values. In Table 1, the selected values for the performance index are shown. These values were selected according to the following criterion: if
Performance index table.

Z: zero; S: small; M: medium; L: large.
Stability analysis
In this work, the approach that we address to carry out the stability analysis of the closed-loop system is considering the SOF-P-PI controller simply as a variable gains P-PI controller, without taking into account the dynamics of the tuning algorithm used for tuning the variable gains. We only assume that the values of the tuned gains of the proportional outer loop can be upper and lower bounded, as well as the change ratio of these gains.
Closed-loop system
By substituting equation (10) in equation (7) we obtain

Since the velocity error in the inner loop and its temporal derivative are
we can write

After adding

Let define the state vector

be considered as a disturbance. From equations (9), (11), (15), and (16) the closed-loop system is

where

Note that the origin of the closed-loop system in equation (17) is not an equilibrium. In the current case, the stability of a nominal system will be investigated first, to investigate the uniform and uniform ultimate boundedness of the solutions of the closed-loop system in equation (17).
Stability of the nominal system
When the disturbance

where

Notice that the origin

The first term of equation (19) can be written as

and it can be upper bounded as

The third and fourth terms can be lower and upper bounded as

Thus

where

Then, the Lyapunov candidate function in equation (19) satisfies


To ensure that the Lyapunov candidate function is positive definite, it is enough to prove that matrix

The temporal derivative of the Lyapunov candidate function in equation (19) is

which along the trajectories of the nominal system in equation (18) yields

where the Property 2 has been used, as well as equations (12) and (13). The upper bounds of each term of equation (23) can be written as

where

Thus, equation (23) can be upper bounded as

where

To ensure that

From equation (24),

where

Thus, it can be concluded the exponential stability of the origin of the nominal system by satisfying equations (22) and (25).
Stability of the overall closed-loop system
The temporal derivative of the Lyapunov candidate function along the trajectories of the overall closed-loop system in equation (17), after simplifying terms can be written as

The last term of equation (28) can be upper bounded as

where it has been taken into account that

where

After substituting equations (26) and (31) as the upper bounds of equation (28) and making some arrangements, we obtain

Now we define a ball

inside which there exist conditions for the temporal derivative of the Lyapunov candidate function

Let introduce a positive constant

Investigating the positiveness of the sum of the first and the third terms of equation (35) we have that

when

Thus, by denoting

from equation (35) we can write

Notice that the coefficient of

is satisfied.
Now we are ready to establish the main stability result in the following.
Proposition 1
Let consider the dynamic model of a parallel robot in equation (7), together with the control law given by equations (9) to (11), where

where

are uniformly ultimately bounded with ultimate bound given by

with
Proof
First, note in equation (20) that the Lyapunov candidate function V is upper and lower bounded by positive definite functions of
Remark 1
For any initial state
Remark 2
Notice that the radius υ of the ball
Simulations
To test the effectiveness of the proposed control approach, we conducted numerical simulations of the proposed controller applied to the model of a planar parallel 3-revolute-revolute-revolute (RRR) joints robot. In the following subsection, the matrices of the dynamic model of the parallel 3-
Kinematic structure of the parallel 3-R RR robot
The kinematic structure of the robot is shown in Figure 5. This structure is designated as 3-
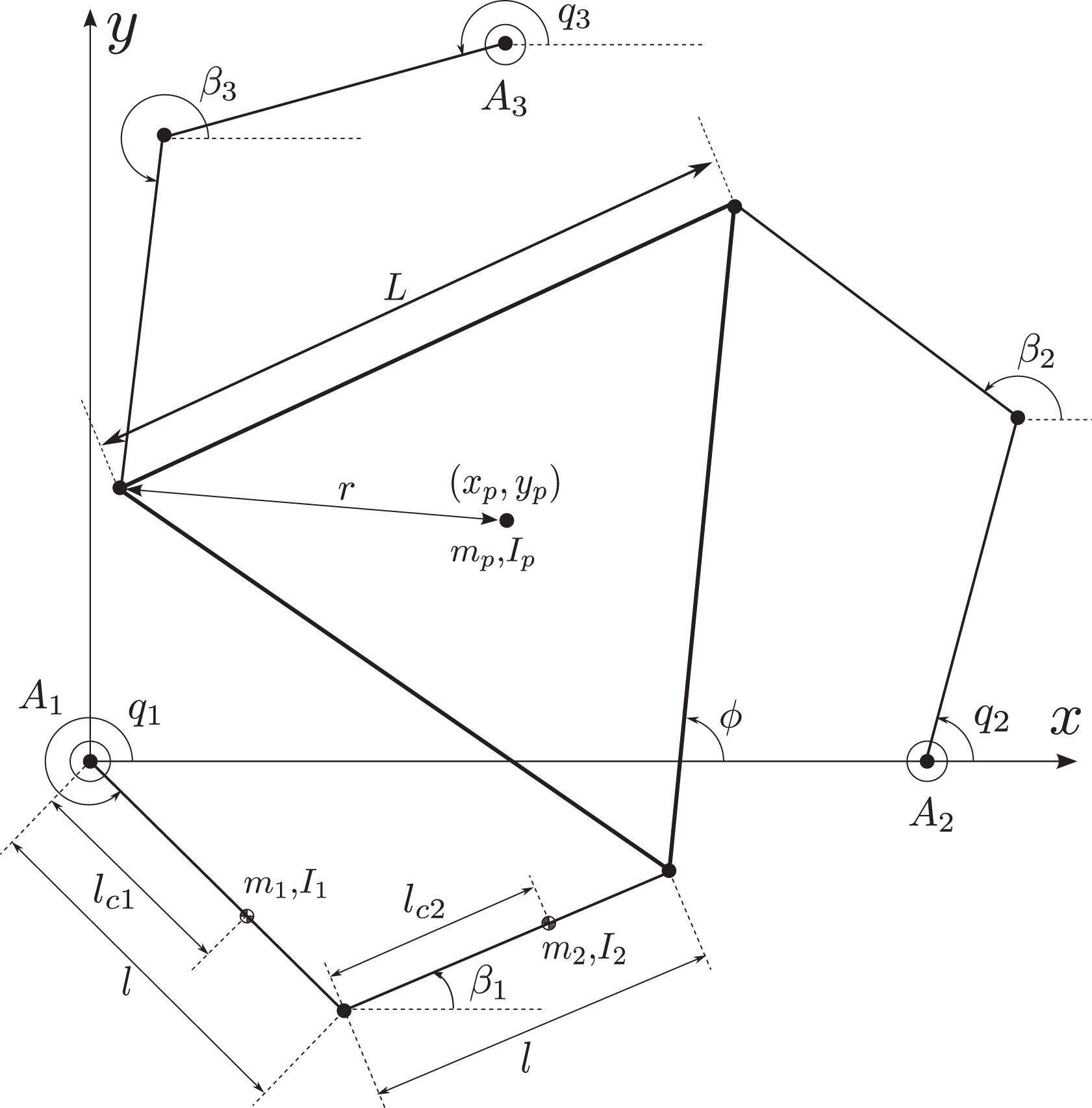
Structure of the parallel robot 3-
The equation of the dynamic model of the robot used for simulations is equation (1). The nonzero elements of the matrix

where
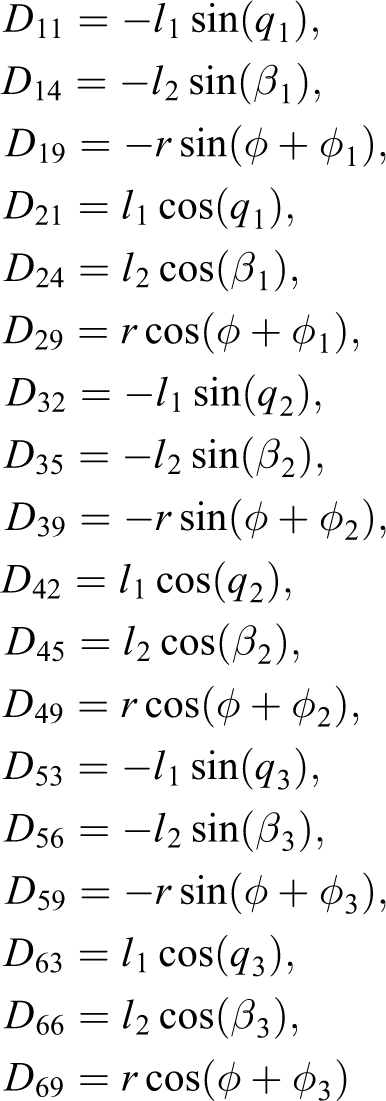
The nonzero elements of the matrix

where
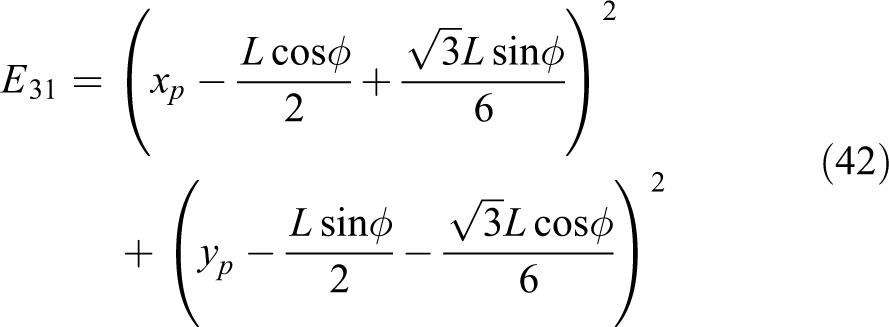
Since the robot workspace is limited to the horizontal plane, it can be considered that the robot is not affected by gravity forces. The nonzero elements of the matrix
where

(see Garcia-Gamez et al.’s work 29 ).
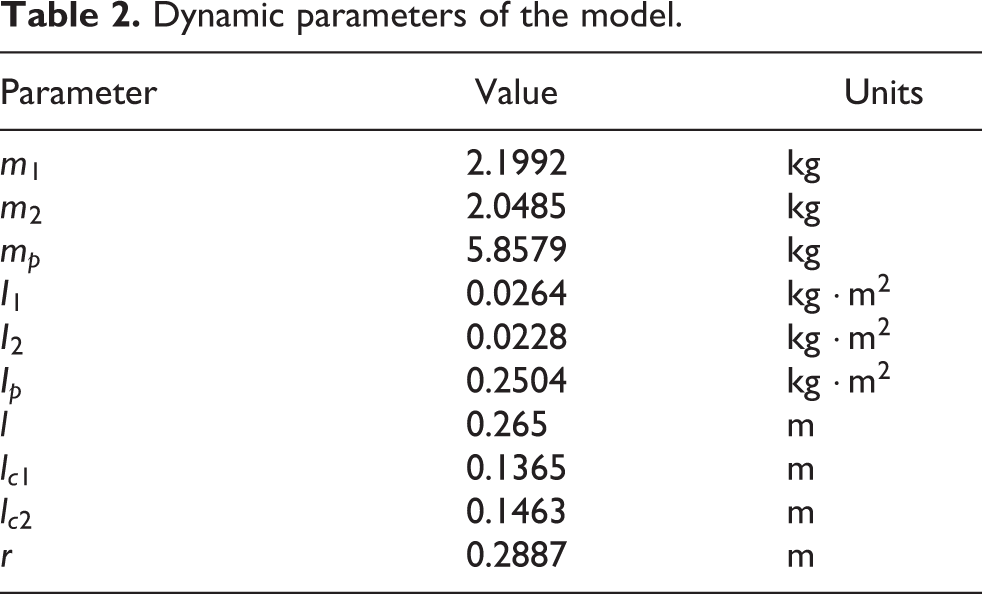
The parameters of the dynamic model are shown in Table 2. The inverse kinematic model 34 is

where








with
Dynamic parameters of the model.
Desired trajectory
The desired trajectory for the end-effector of the manipulator is an elliptical trajectory in operational space is given by

where
An important issue regarding the motion of parallel manipulators is the avoidance of singular configurations. These configurations exist in the workspace of the manipulators and are represented by the mathematical singularity of the jacobian matrices of the differential kinematic model. It is well known that passing or approaching a singular configuration in the trajectory of the robot can result in high joint velocities and important uprising of the mechanical load, including an eventual loss of the control of the mechanism.
35
There exists, in the literature of motion of parallel robot, several approaches for singularity avoidance, from trajectory planning to redundancy schemes.
36,37
In this work, we address this problem by designing a desired trajectory that is free of singular configurations. With that objective in mind, we compute the reciprocal of the condition number
Simulations
A practical issue concerning the actuators of a robot is to avoid saturating the actuators with torque control references that exceed the rated values, particularly at the beginning of the test. In this work, to avoid actuator saturation in a similar way to real-time experiments, we established an upper bound for the demanded torques from each actuator. This upper bound prevent the controllers to produce a torque control signal that a real actuator cannot accomplish in real-time experiments. The upper bound for the torque control signals was set to 4 Nm.
The selected gains of the inner loop PI control loop are shown in Table 3. These gains were selected by a trial and error process to avoid exceeding the upper bound of the actuators, particularly at the beginning of the test. For comparison purposes, simulations of two more controllers: a classic PID controller and a FPD controller applied to the 3-
Gains of the PI control loop.
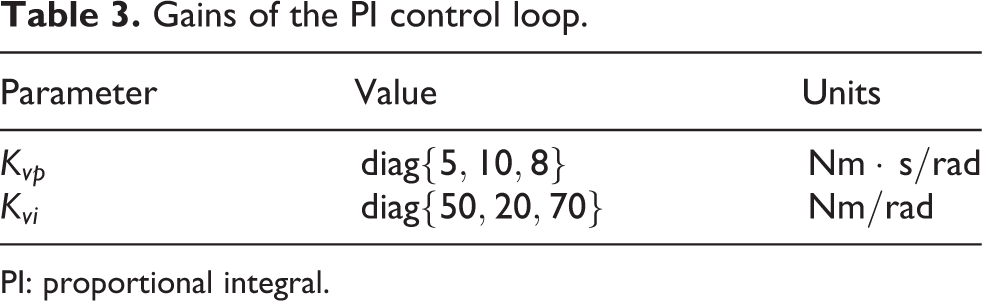
PI: proportional integral.
Gains of the PID controller.

PID: proportional integral derivative.
The FPD controller is the proposed by Salas et al.,
33
which is inspired on the work by Llama et al.
38
Both gains P and D are tuned by a fuzzy inference engine. Three input fuzzy membership functions and three output fuzzy membership functions are used. The partitions of these functions are shown in Table 5. Similar to the work reported by Salas et al.,
33
the inference mechanism is supported on three fuzzy inference rules If If If
where
Partitions of the fuzzy membership functions of the FPD controller.

FPD: fuzzy-tuned proportional derivative.
The defuzzification is carried out by a simplified version of the Center-of-Gravity method, 38 which can be written as
where
Simulation results are shown in Figures 6 to 12. In Figures 6 to 8, the errors in joints 1 to 3, respectively, obtained by the three controllers, are depicted. The largest tracking error peaks obtained by the PID controller were 0.2, 0.18, and 0.0055 rad for the joints 1, 2, and 3, respectively, while the largest tracking error peaks obtained by the SOF-P-PI controller were 0.01, 0.01, and 0.005 rad, for the joints 1, 2, and 3, respectively. The largest tracking error peaks obtained by the FPD were 0.06, 0.02, and 0.0053 rad, for the joints 1, 2, and 3, respectively. It can be noticed in Figures 6 to 7 that both errors produced by the PID controller in joints 1 and 2 have much larger overshooting and settling times that the errors produced by the SOF-P-PI controller. On the other hand, the overshooting and settling times produced by the FPD controller are only a little larger than in the SOF-P-PI controller. In addition, it can be noticed in Figure 8 that although the overshooting response in the three controllers for the joint 3 are similar, the steady-state error of the SOF-P-PI controller is smaller than the steady-state error of the PID and the FPD controllers. In Figures 9 to 11 the demanded torques by the SOF-P-PI, the PID, and the FPD controllers, respectively, are shown. Observe in these figures that, in the entire simulation time, the torques are below the predefined value for maximum torques. In Figure 12, the temporal evolution of the variable P gains in the outer loop are shown. This temporal evolution exhibits the increase of the gain values according to the adopted criteria in the SOF algorithm, to obtain small tracking errors. Also, in Figures 13 and 14, the temporal evolution of the P and D gains, respectively, of the FPD controller are shown.

Position errors in joint 1. SOF: self-organizing fuzzy; FPD: fuzzy-tuned proportional derivative; PID: proportional integral derivative; P-PI: proportional–proportional integral.

Position errors in joint 2. SOF: self-organizing fuzzy; FPD: fuzzy-tuned proportional derivative; PID: proportional integral derivative; P-PI: proportional–proportional integral.

Position errors in joint 3. SOF: self-organizing fuzzy; FPD: fuzzy-tuned proportional derivative; PID: proportional integral derivative; P-PI: proportional–proportional integral.

Commanded torques by SOF-P-PI. SOF: self-organizing fuzzy; P-PI: proportional–proportional integral.

Commanded torques by PID. PID: proportional integral derivative.

Commanded torques by FPD. FPD: fuzzy-tuned proportional derivative.

Evolution of P gains by SOF algorithm. P: proportional; SOF: self-organizing fuzzy.

Evolution of P gains by FPD. P: proportional; FPD: fuzzy-tuned proportional derivative.

Evolution of D gains by FPD. D: derivative; FPD: fuzzy-tuned proportional derivative.
A useful quantitative measurement of the performance of a controller can be done by computing the

Here, T is the computed time period and

SOF: self-organizing fuzzy; PID: proportional integral derivative; FPD: fuzzy-tuned proportional derivative; P-PI: proportional–proportional integral.
Conclusion
In this article, we have presented a novel two-loop P-PI tracking controller for parallel manipulators, in which the gains of the outer loop are online tuned by an original SOF algorithm. This controller is a not model-based scheme which improves the robustness in the presence of perturbations and parameter uncertainty of the constant gains two-loop approach for tracking control, by implementing a variable gains loop.
The stability analysis of the closed-loop system has been developed, resulting in the uniform ultimate boundedness of the solutions of the closed-loop system. It is worth to mention that this result can be generalized not only to P-PI tracking controllers with variable gains tuned by an SOF algorithm but also to other variable gains P-PI tracking control schemes for parallel robots, only providing that the gains produced by the tuning algorithm satisfy the boundedness criterion. This is an original result not published elsewhere.
The usefulness of the proposed controller was validated by performing numerical simulations of the application of the controller to a parallel manipulator. In addition, simulations of a PID controller and a FPD controller applied to the parallel manipulator have been conducted for comparison purposes. The simulation results of the three controllers were contrasted, from which a significant quantitative measurement result was obtained that shows the better results of the SOF-P-PI controller.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by PRODEP/SEP Mexico.
Appendix 1
In this appendix, we obtain the upper bound of the perturbation of the system.