
Abstract
A quadrotor-like autonomous underwater vehicle that is similar to, yet different from quadrotor unmanned aerial vehicles, has been reported recently. This article investigates the stability and nonlinear controllability properties of the vehicle. First, the 12-degree-of-freedom model of the vehicle deploying an X shape actuation system is developed. Then, a stability property is investigated showing that the vehicle cannot be stabilized by a time invariant smooth state feedback law. After that, by adopting a nonlinear controllability analysis tool in geometric control theory, the small-time local controllability of the vehicle is analyzed for a variety of cases, including the vertical plane motion, the horizontal plane motion, and the three-dimensional space motion. Finally, different small-time local controllability conditions for different cases are developed. The result shows that the small-time local controllability holds for vertical plane motion and horizontal plane motion. However, the full degree of freedom kinodynamics model (i.e. 12 states) of the vehicle does not satisfy the small-time local controllability from zero-velocity states.
Keywords
Introduction
Autonomous underwater vehicles (AUVs) have been under development since the early 1970s. Due to the dramatic advancements in computing and sensor techniques of present technologies, AUVs have been used to perform a variety of different tasks, including scientific, military research, and commercial applications, 1 –6 to name but a few. The challenging problems involved in these applications are accurate localization and navigation. In general, taking weight, complexity, reliability, and efficiency into account, AUVs are commonly designed without lateral actuators to be a typical underactuated control system. For such a system, localization and navigation are difficult, partly because it exhibits nonholonomic constraints and is not fully feedback linearizable. 7,8 In fact, a nonholonomic system cannot be stabilized by a smooth static state feedback. 9 It is significant to study the controllability of AUVs to find its limitation of localization and navigation.
Intuitively, controllability is a problem about the ability to drive a system from one state to any other state in finite time with an admissible control input. In the past few decades, much research have been carried out to analyze the controllability for both linear and nonlinear systems. For the controllability of a linear system, Kalman et al. 10 presented a necessary and sufficient condition, known as Kalman Rank Condition over half a century ago. Gao and Zhao 11 discussed the linear controllability of a two-dimensional translational oscillators with rotating actuator (2-DTORA) when the 2-DTORA system is on the horizontal plane and on a slope, respectively.
Generally speaking, it is much challenging for studying nonlinear controllability due to various types of nonlinear systems. Among different approaches, the local linearization and geometric control theory are two main tools that have been widely used. However, the controllability condition about a given point using the local linearization approach is a sufficient but not necessary one, that is, there exists a class of nonlinear systems that are linearly uncontrollable but nonlinear controllable. 12 Alternately, geometric control theory is one of the most suitable frameworks for analyzing the controllability of nonlinear systems, with which various notations of controllability have been defined in the literature. 13 Here, we focus on the small-time local controllability (STLC). Sussmann 14 proposed a general sufficient condition for STLC of a nonlinear system at a given point. The authors show that many results proposed previously were particular cases. Goodwine and Burdick 15 proposed a method for assessing the nonlinear controllability of systems with unilateral control inputs based on the STLC condition proposed by Sussmann. 14
There are many studies related to STLC issues in various fields. Gui et al. 16 proved a spacecraft-control moment gyro system is STLC. Muralidharan and Mahindrakar 17 proved that a spherical robot is STLC at the equilibrium using the Bianchini and Stefani’s condition, 18 which is a particular case of the result proposed by Sussmann. 14 Liljeback et al. 19 showed that a snake robot does not satisfy sufficient conditions for STLC. Du et al. 20 considered the controllability analysis and fault-tolerant control problems for a class of hexacopters. For a multirotor unmanned aerial vehicle (UAV), Saied et al. 21 investigated the attitude controllability issue using geometry control theory and considering different rotor failures and explored the STLC of the vehicle attitude dynamics subjected to unilateral control inputs. Hassan et al. 22,23 investigated the airplane flight dynamics using the linear controllability analysis and geometric control formulation. For the underwater applications, Pettersen and Egeland 24 proved that the STLC of the surface vessel is satisfied. Compared to the surface vessel, 24 the quadrotor-like AUV (QLAUV) introduced in the article possesses more complex dynamic constraints. The result is not applicable to judge the STLC of the QLAUV. Moreover, the work of Saied et al. 21 explores only the attitude controllability issue but not expands the result to full-dimension states for a UAV.
This article investigates the stability and nonlinear controllability of the QLAUV. Similar to quadrotor UAVs, the QLAUV is equipped with only four identical thrusters for motion control. 25 The unique characteristic of the vehicle is that the configuration shape of thrusters is like a character X. Thus, the thrust configuration is named by the X shape actuation system. Compared to traditional AUVs, it can achieve more kinds of motions, for example, yaw control at the zero surge speed state. A stability analysis is investigated, proving that there exists no smooth static state feedback law that makes the QLAUV asymptotically stabilize to equilibrium. Furthermore, the STLC of the QLAUV is analyzed for different cases including the vertical plane motion, the horizontal plane motion, and the three-dimensional (3-D) space motion.
The rest of the article is organized as follows. QLAUV kinematic and dynamic models are presented in the second section. In the third section, we investigate the stability of the QLAUV considering 12-degree-of-freedom (DOF) states. The STLC analysis based on geometric control theory is introduced in the fourth section. In the fifth section, we analyze the STLC of the QLAUV with regard to different cases, which is followed by some concluding remarks.
QLAUV nonlinear dynamic modeling
This section introduces primarily the kinematic and dynamic motion equations for the QLAUV. Subsection “Vehicle description” describes the vehicle as a whole. Subsection “Vehicle kinematics and dynamics” gives the kinematic and dynamic equations of the system; complex hydrodynamic effects are also taken into account. Finally, subsection “The ‘X shape’ Actuation system” analyzes the X shape actuation system of the QLAUV, related to forces and torques equations.
Vehicle description
The QLAUV was firstly introduced by Bian et al. 25 and has been reported recently by Bian and Xiang 26 to implement various motions using a sliding mode controller. It is developed under the project of the State Key Laboratory of Industrial Control Technology. This QLAUV is about 120 cm in length and 28 cm in diameter. To reduce the negative impact of the hydrodynamic forces, the hull of the vehicle is designed to a cylindrical shape, and the hand and the tail are elliptical. Figures 1 and 2 present the actual shape and the mechanical drawing of the QLAUV, respectively. As shown in Figures 1 and 2, the QLAUV has four identical thrusters, which are symmetrically configured apart at two sides of the hull. Furthermore, there exists a deflection angle between the body of the thrusters and the longitudinal axis of the vehicle. Besides, the direction of the heads of the thrusters is opposite: On one side, the heads of the two thrusters are close; on the other side, the heads keep away from each other.

Quadrotor-like autonomous underwater vehicle.

QLAUV profile. (a) Left lateral view, (b) right lateral view, and (c) top view. QLAUV: quadrotor-like autonomous underwater vehicle.
Vehicle kinematics and dynamics
Define an inertial coordinate frame

where
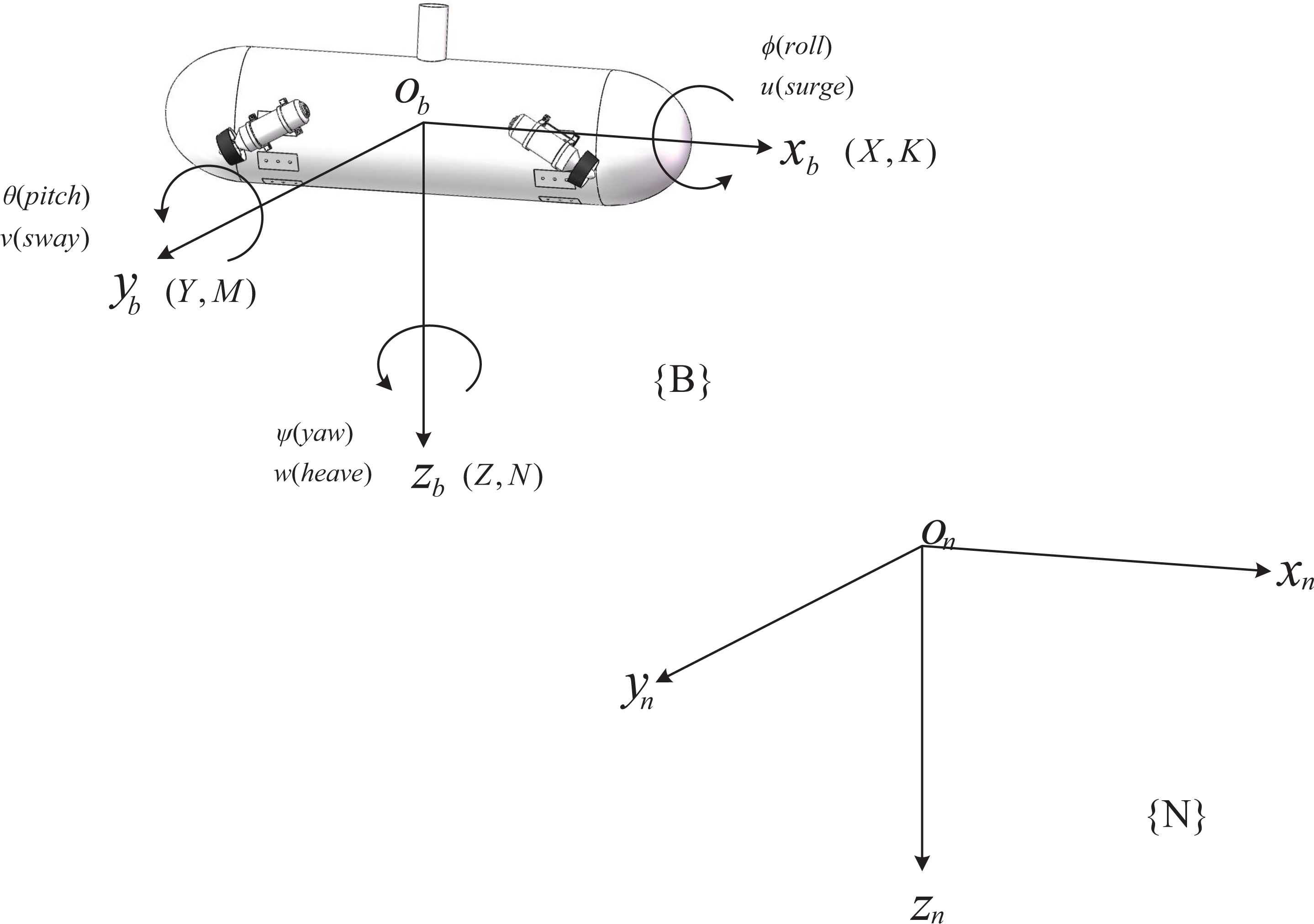
Inertial frame and body-fixed frame for QLAUV. QLAUV: quadrotor-like autonomous underwater vehicle.
The kinematic transformation

where the abbreviations

One can use Kirchhoff’s equation
27
to derive the rigid-body Coriolis

Also, the damping matrix D is expressed as

For simplicity, the higher-order nonlinear terms of D are neglected.
The “X shape” actuation system Γ
The actuation system should be described in the body-fixed reference frame due to the fact that the dynamic model of the QLAUV is derived in the frame. More specifically, both the thruster’s geometric center and the vehicle’s CG are designed to be in the xb
yb-plane. The configuration of the thrusters is described in Figure 4, in which thruster i presents the i th thruster,

The configuration of the thrusters in a left view.
As described in subsection “Vehicle description,” the centers of the four thrusters are located symmetrically in the
According to the geometry of the QLAUV, the X shape actuation system, that is, the mapping between the thrusters’ lifts and the total forces and torques is given by

where
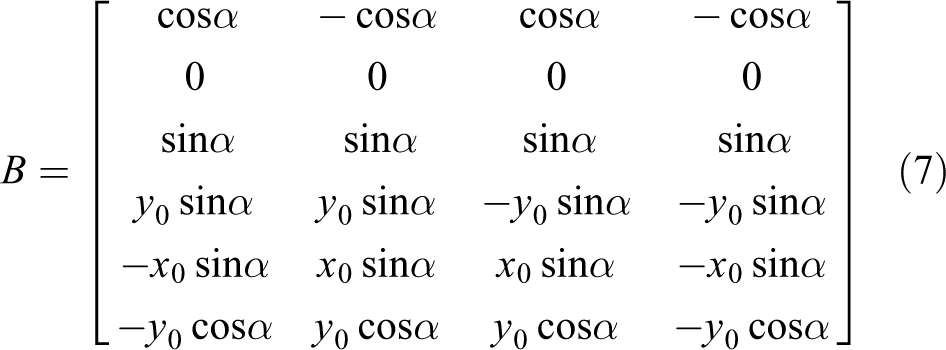
The elements of B are derived by the geometric analysis of the forces imposed on the QLAUV. For example, as shown in Figure 5, The decomposition of the thrusters’ lifts in the plane of projection of 

which forms the first row of B. Similar processes can be followed in the other directions of motion.
The columns of B imply that each thruster can provide forces or torques in the directions of surge, heave, roll, pitch, and yaw. Some simple motions such as the surge, heave, or yaw motion for the QLAUV should be implemented through the counteraction and superposition of the thrusters so that the actuation system is strongly coupled. A transformation matrix T satisfying
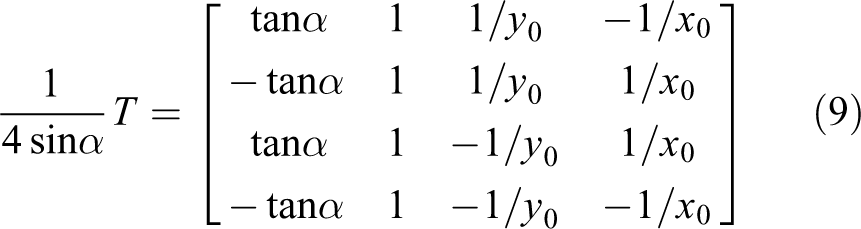
is introduced here to decouple the actuation system. Define

by which the mapping of the actuation system becomes

Now
Applying the above notations, the system (1) can be rewritten into the following affine nonlinear model

where
Stabilizability of QLAUV
As shown in the actuation system (11), the QLAUV cannot achieve lateral movements directly since the second element of the system (11) is zero, which is a typical underactuated system. The following result shows that there exists no smooth static state feedback law that ensures asymptotic stability regarding the equilibrium.
Theorem 1
Consider the kinematic and dynamic models (1) of the QLAUV and the actuation system (11), and suppose
Proof
Define the following mapping

where

Consider the points of the form

where
Small-time local controllability
Consider an affine nonlinear system as follows

where

to be controllable. That is, the linearized version of Kalman rank condition

to be of full row rank.
12
Alternatively, geometry control theory has been widely used to study the STLC. The reader can refer to the study of Kou et al.
28
for some definitions, such as the reachable set
Theorem 2
Consider the system
When the hypotheses of this theorem hold, one can say that the system satisfies Lie Algebra Rank Condition (LARC) at x0. 29
For a driftless system where the vector filed f equals a zero vector, the system is STLC if it verifies the LARC. 21 However, the condition is not sufficient with a drift system, as some of the Lie brackets involved the drift term may have directional constraints, which obstructs the controllability of the system. 30 For the systems with drift, Sussman 14 proposed a general theorem which states that some additional conditions about good and bad Lie brackets should hold besides the LARC in order to guarantee the STLC.
Theorem 3
A system that satisfies the LARC by good Lie brackets terms up to degree i is STLC if all bad Lie brackets of degree
It is worth mentioning that if a Lie bracket can be presented by a linear combination of good Lie brackets of lower degree, it is neutralized and such a bracket does not obstruct STLC. Particularly, a bad Lie bracket is neutralized if it is equal to zero at the equilibrium. Algorithm 1 shows a procedure to study the STLC of any given affine system.
The procedure to study the STLC of a given system.

Sussman
14
gives a simple approach to judging whether a Lie bracket is good or not. Consider any Lie bracket X consisting of the drift vector f and control vectors
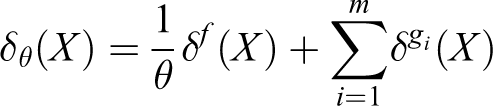
where θ is an arbitrary term satisfying
Some Lie brackets.

Geometric control formulation for QLAUV kinematics and dynamics
Simple computations show that the local controllability cannot be judged by the method of linearizing the system of the QLAUV at its equilibrium. In this part, we investigate the STLC of the QLAUV considering different cases such as the dynamic and kinodynamic models using geometric control theory.
Controllability of dynamics
This part mainly studies the controllability for QLAUV dynamics, which focuses on velocities and angular velocities of the vehicle, leaving displacements and attitudes alone.
Three-DOF dynamics
We firstly study the three-DOF dynamics of the QLAUV in an affine form as in equation (16), where the state vector

The drift field

with det
Following the approach in the previous section, all bad brackets where the degree is less than or equal to 3 include

All the above brackets are equal to
Remark 1
It is worth to be highlighted that even if the system drift vector
For example, consider the system (19) as a driftless one at the equilibrium to yields
Note that any control input vector
Four-DOF dynamics
This part considers one more variable, the heave velocity w, so that the state vector is
The drift field

with det
Six-DOF dynamics
Considering all linear and angular velocity vectors, where

The accessibility distribution is given by

with det

It can be neutralized by a lower degree good bracket
Controllability of kinodynamics
The above subsection analyzes the controllability of the underwater vehicle without considering the displaced position and orientation, which is vital to the path following, trajectory tracking, path planning, and so on. This subsection further analyzes the controllability of the vehicle considering both kinematics and dynamics.
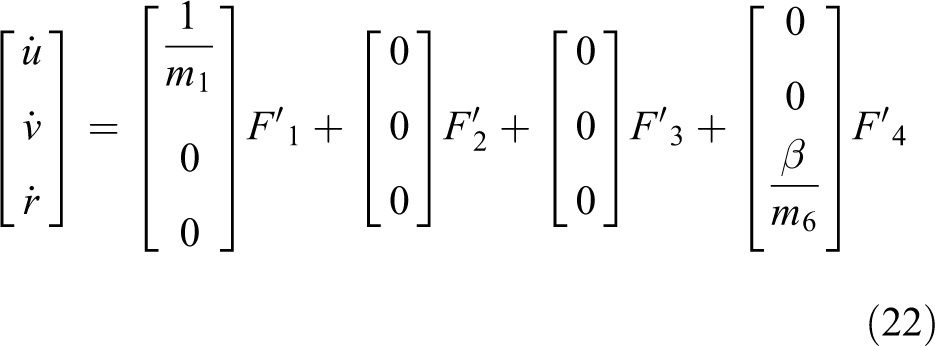
Vertical plane kinodynamics
This part considers only the surge and heave displacements and velocities, where

As shown in the actuation system (11), there exists no coupled terms between the direction of surge and heave movements, and the surge and heave motion can be directly controllable. However, this does not imply that the system is STLC. The main results are presented as follows.
Theorem 4
The system (1) considering vertical plane kinodynamics only is STLC in zero-velocity states, satisfying the yaw angle
Proof
The accessibility distribution of the system (28) is given by

with det

Note that
A straightforward explanation about condition (30) is: when yaw angle ψ is approximate to
Horizon plane kinodynamics
This part investigates the kinematic and dynamic models of the QLAUV in the horizontal plane. The system state vector

The accessibility distribution is given by

with det

when
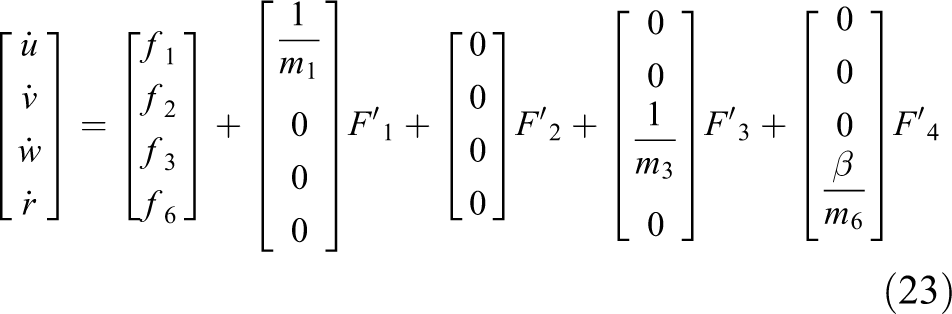
3-D space kinodynamics
This part considers the 3-D full-degree kinematic and dynamic models of the QLAUV. Here, the linear velocities transformation is omitted as it does not affect controllability (i.e. ignorable coordinates).
23
The system state vector
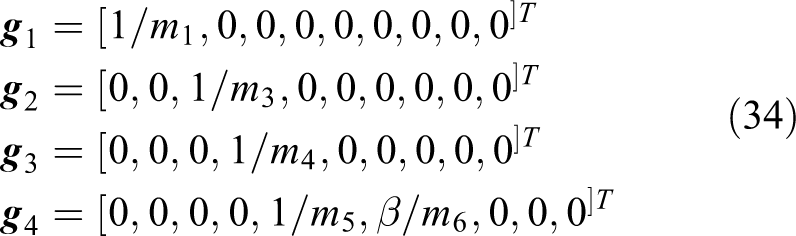
The accessibility distribution is given by

Tedious computation indicates that in zero-velocity states, rank
Remark 2
Note that the controllability of some cases abovementioned such as subsection “Four-DOF dynamics” and subsection “Vertical plane kinodynamics” can be analyzed by the linearized version of Kalman rank condition (18). For example, the linearized form of four-DOF dynamic system at the equilibrium is described as

where

The rank of the controllability matrix

is found to be 4 if
Conclusion
In the article, the stability property and controllability of the QLAUV have been investigated. First, it is proved that the QLAUV is not stabilizable by time invariant smooth state feedback. Then, by use of geometric control theory, we analyzed the STLC of the QLAUV. Furthermore, we investigated different STLC conditions with regard to the dynamic and kinodynamic models. Although the STLC holds in the case of vertical plane motion and horizontal plane motion, the full-DOF kinodynamics model (i.e. 12 states) of the QLAUV system does not satisfy the LARC and is not STLC from zero-velocity states.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61573314, 61773339), the Fundamental Research Funds for the Central Universities (2018XZZX001-06), and the Research Project of the state key Laboratory of Industrial Control Technology (ICT1811).