
Abstract
Online feasible trajectory generation for an airdrop unpowered reusable launch vehicle is addressed in this article. A rapid trajectory planning algorithm is proposed to satisfy not only the multiple path and terminal constraints but also the complex geographic constraints of waypoints and no-fly zones. Firstly, the lower and upper boundaries of the bank angle that implement all the path constraints are obtained based on the quasi-equilibrium glide condition. To determine the bank angle directly, a weighted interpolation of the boundaries is then developed, which provides an effective approach to simplify the planning process as a one-parameter search problem. Subsequently, three types of lateral planning algorithms are designed to determine the sign of the bank angle according to the requirements of waypoints passage, no-fly-zones avoidance, and terminal constraints in the airdrop process, and the convergence of these methods for passing over the waypoints and meeting the terminal conditions has been clarified and formally demonstrated. Considering the constraints in the actual airdrop flight missions, the planning trajectory is divided into several subphases to facilitate the application of corresponding algorithms. Finally, the performance of the proposed algorithm is assessed through three airdrop missions of reusable launch vehicle with different geographic constraints. Besides, the effectiveness of the algorithm is demonstrated by the Monte Carlo simulation results.
Keywords
Introduction
In recent decades, owing to the advantages of quick support capability, ultra-long flight range, and high security in global strike and space transportation, the airdrop system of reusable launch vehicles (RLVs) has attracted widespread interest in both military and civilian applications. 1 Compared with common vehicles, there are many distinctive characteristics for RLVs, especially the strong coupling and highly nonlinear dynamics, which make the modelling and control of RLVs a significant challenge. 2 Meanwhile, the changing of the moment of inertia, center of gravity position, and aerodynamic moment caused by airdrop brings about uncertain dynamics. 3 Therefore, to significantly improve the flexibility and reliability of RLVs during the airdrop process, it is necessary and important to carry out accurate attitude and position control of flight in the presence of airdrop’s effect. 4
Current researches related to the airdrop mainly focused on the analysis of airdrop problem, 5 modeling of vehicle dynamics, 6 trajectory planning, 7 control law design, 8 simulation of airdrop process, 9 and so on. Gao et al. 5 studied the influence of perturbation on the airdrop system. Tao et al. employed an improved genetic algorithm to solve the homing trajectory planning problem for parafoil airdrop system. 7 Chen and Shi designed a backstepping and switch controller to guarantee the system stability and attitude tracking. 8 There are still many problems to be solved in the trajectory planning of the airdrop RLV except for satisfying various path and terminal constraints. For some special flight missions, the RLV is required to precisely overfly some predetermined positions on the ground which are referred as waypoints, such as telemetry stations that can validate the navigation of the vehicle, 10 enemy targets that need to be destroyed, or disaster-hit area where relief materials should be airdropped. 1 In addition, some special regions on the RLV flight path should be kept away owing to geopolitical restrictions or security threats, such as large cities, fire blockade area, or military bases, which can be regarded as no-fly zones. 11,12 Therefore, these waypoints and no-fly zones make the trajectory calculations for airdropping more complicated.
Numerous studies have been conducted to develop advanced trajectory planning algorithms for the airdrop RLV that can deal with multiple flight constraints, including path constraints, terminal constraints, and geographic constraints. The entry guidance for the Space Shuttle orbiter is a successful application of the drag acceleration profile generation that satisfies the specified entry terminal criteria while maintaining the flight within path constraints. 13 Later, some improvements have been developed. Two acceleration planning methods based on a reduced-order model are proposed by Mease et al., which consider both longitudinal and lateral motions of RLVs. 14 Saraf et al. developed the so-called evolved acceleration guidance logic for entry, which consists of two parts: a trajectory planner to generate reference drag acceleration and heading angle profiles and a tracking law to follow the two profiles simultaneously. 15 Moreover, to deal with the geographic constraints, a global discrete search strategy is presented by Yang and Zhao for the generation of four-dimensional trajectory of autonomous aerospace vehicles with obstacles, conflicts, and threats. 16 Then, Jorris and Cobb developed the autonomous trajectory planning techniques to satisfy waypoints and no-fly zone constraints simultaneously for the two-dimensional and three-dimensional (3-D) Common Aero Vehicle model. 10,17 Besides, various optimization approaches, such as improved Gauss pseudospectral method 18 and multiphase convex programming, 19 have been applied to obtain the optimal reentry trajectory with the two geographic constraints for hypersonic vehicle. However, these trajectory planning/optimization algorithms for waypoint and no-fly-zone constraints are all conducted offline.
For the airdrop of RLV, it is crucial to rapidly generate a feasible trajectory to the airdrop positions online, while avoiding some potential threats, which can give full play to the quick support capability of RLV. Shen and Lu applied the quasi-equilibrium glide condition (QEGC) to an onboard trajectory design approach, which can generate a feasible 3-D flyable trajectory within several seconds, 20 and filled a gap in the onboard suborbital entry trajectory planning. 21 Zhang et al. proposed a new approach to generate the longitudinal drag profile and lateral lift-to-drag profile simultaneously. 22 When taking the waypoint and no-fly zone constraints into account, the magnitude and sign of the bank angle are rapidly calculated in parallel based on a Newton–Raphson iteration scheme 23 and also determined by two online sub-planners, respectively. 11 A novel 3-D autonomous gliding guidance algorithm is presented by Guo et al., where two-bank-reversal logic and a dynamic heading-error corridor are designed to meet the geographic constraints. 24 The 3-D analytical glide formulae are adopted to plan the reference trajectory of aerodynamic and inertial forces for no-fly-zone avoidance by Yu et al. 25 These algorithms deal with the problem more comprehensively, and they all generate 3-D trajectories. However, the 3-D profiles generation needs a large amount of calculation, and the implementation process is quite complex. Besides, some intelligent methods are also applied to this area. Artificial potential field method is employed to avoid the no-fly zones by Zhang et al. 26 Yong et al. applied the intelligence control method based on brain emotional learning to develop a predictor–corrector guidance algorithm, which can generate the reference trajectory onboard with waypoints. 27 With the adjustment of angle of attack and nonreversal bank angle, the reference profile similar to Zhang is generated rapidly and can avoid no-fly zone effectively. 28 These methods are flexible and easy to implement, but the maneuverability of the vehicle is not fully utilized, resulting in that only fewer constraints can be handled. Although many researches have been conducted on the rapid trajectory planning of RLVs for airdrop, there are few algorithms to analyze the problem of whether the computation time of the geographic constrained trajectory generation meets the requirement of online operation. For some of the above trajectory planning algorithms, whose computational complexity is relatively large, they are not fast enough to run onboard.
In this article, a new online trajectory planning approach is proposed to rapidly generate a feasible trajectory satisfying the path, terminal, waypoint, and no-fly zone constraints for the airdrop RLV. Unlike the existing method of converting the path constraints into the altitude or drag acceleration corridors, the QEGC is applied to describe these path constraints as the bank angle corridor in this article. Then, a weighted combination of the lower and upper boundaries of the bank angle provides an effective way to simplify the planning process as a one-parameter search problem, considering trajectory range and lateral maneuverability. Three types of lateral planning algorithms are developed according to the different requirements of waypoints passage, no-fly-zones avoidance, and terminal constraints satisfaction in the airdrop process. In addition, the convergence of the methods for passing over a waypoint and for meeting the terminal conditions is clarified and formally demonstrated. Finally, three nominal RLV airdrop fight missions with different geographic constraints are simulated, and to further evaluate the effectiveness of the planning algorithm, the Monte Carlo simulation is conducted.
The main contributions of this study are summarized as follows. First, the whole trajectory is divided into several subphases adaptively during the planning to reduce the integral range of each iteration and further expedite the calculation speed. The computation complexity and computation time of this algorithm satisfy the requirements of online operation, which is the major enhancement compared with the existing trajectory planning algorithms. Second, owing to the independence of the trajectory planning in each subphase, this proposed algorithm can deal with the airdrop flight with different geographic constraints or even without geographic constraints, which significantly improves the adaptability of the algorithm.
The rest of this article is organized as follows. The general trajectory planning problem considering multiple constraints is formulated in the second section. The third section describes the planning algorithms for waypoints passage, no-fly zone avoidance, and terminal constraints satisfaction. In the fourth section, simulation results of three nominal cases and some dispersion cases are presented to verify the effectiveness of the proposed planning algorithm. At last, some conclusions are made in the final section.
Problem formulation
In this section, the dynamics and kinematics characteristics of the RLV are described, and the trajectory planning problem with multiple path constraints, geographic constraints, and terminal constraints is formulated.
Dynamics
The three-degree of freedom (3-DOF) point-mass dynamics of the airdrop RLV over a spherical rotating Earth are described by the following equations of motion 20,29
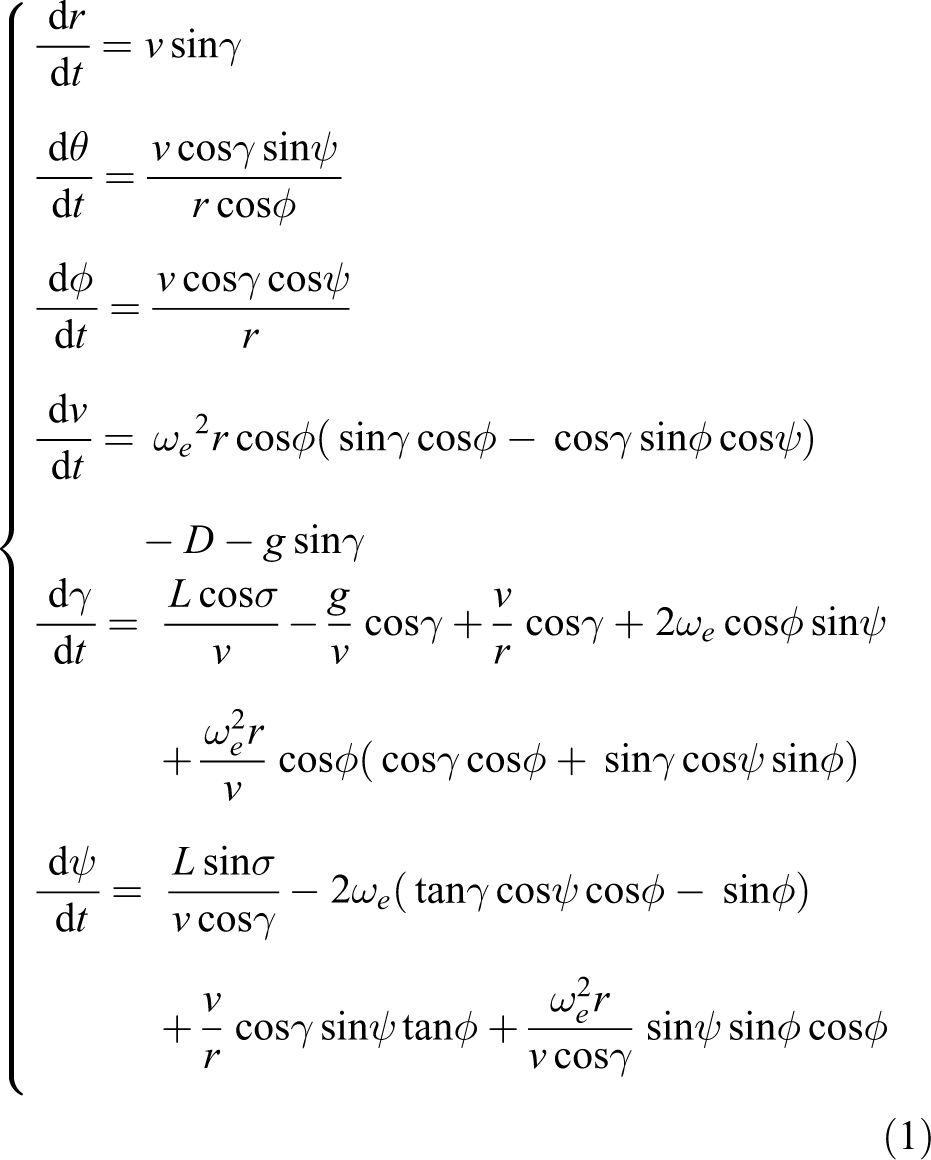
where the velocity heading angle ψ is measured from the North in a clockwise direction. L and D are described as
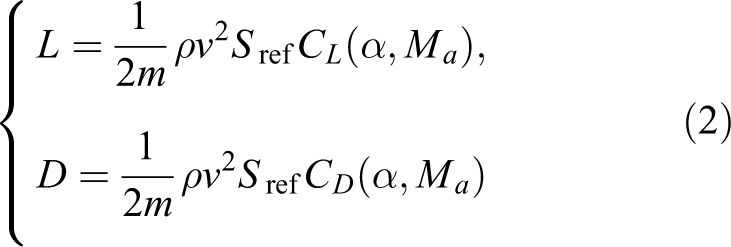
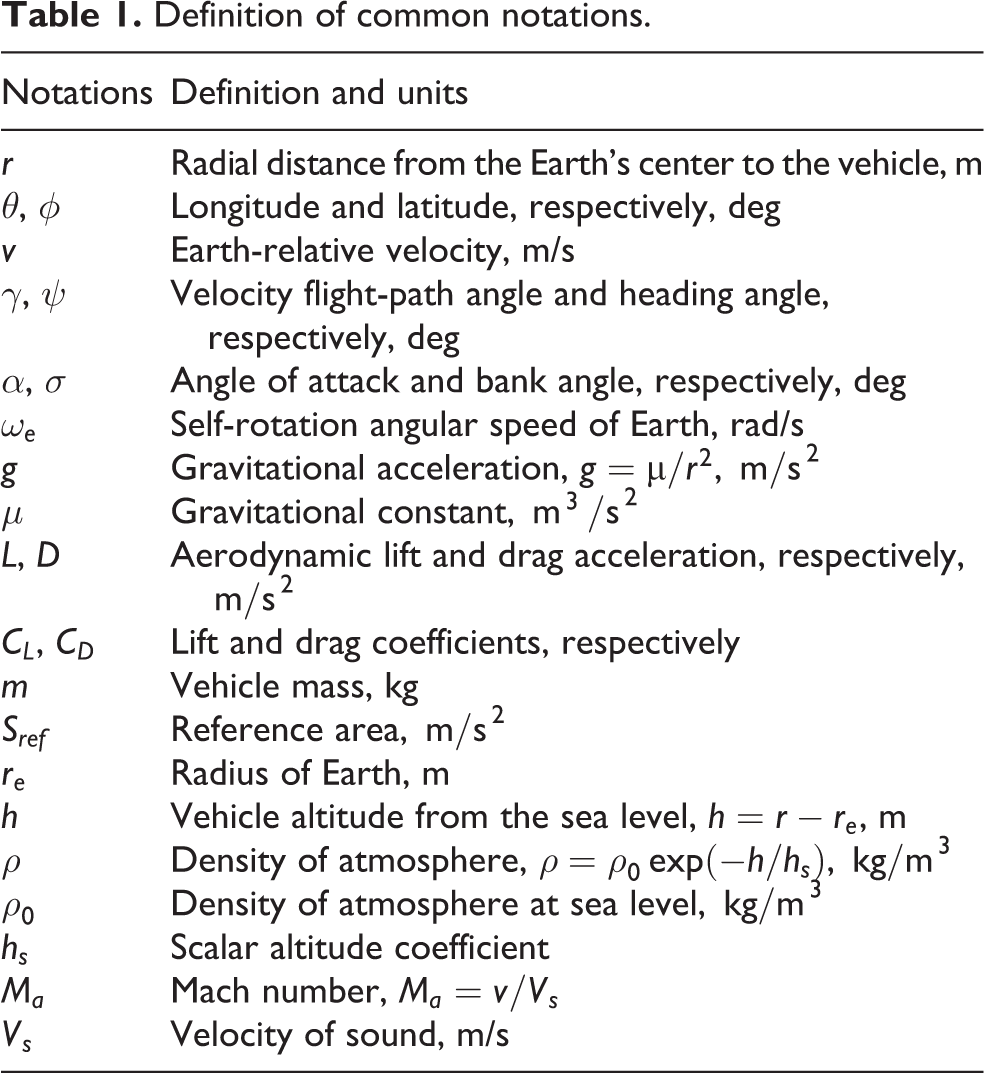
where CL and CD are determined by the angle of attack α and the Mach number Ma. The above notations are defined in Table 1. The geometric sketch of the airdrop flight is illustrated in Figure 1. The control variables are α and σ. To maintain the stability of RLV, it is necessary to limit the magnitude and rate of the two control variables.
Definition of common notations.

Geometric sketch of airdrop flight.
Path constraints
The typical inequality path constraints in the airdrop trajectory, consisting of the heating rate



where c is the heating rate normalization constant. The parameters
It is well-known that in a major portion of the flight trajectory, the flight path angle is small and varies relatively slowly.
20
By setting

This is the so-called QEGC. It can guarantee that the airdrop trajectory doesn’t oscillate acutely for convenience of the attitude controller design and form the upper boundary of altitude corridor. Meanwhile, the above three inequality path constraints form the lower boundary of altitude corridor.
Geographic constraints
The geographic constraints generally include both waypoints and no-fly zone constraints for the airdrop process. Waypoints are defined as the predetermined positions on the ground for multiple enemy targets destruction or relief materials airdrop and are required to be precisely overflew by the airdrop RLV.
11
That is, only the longitude and latitude for waypoint passage are constrained, and the other variables are uncertain. If the point

where
As mentioned before, the no-fly zones are specified as some special regions on the flight path that should not be violated owing to geopolitical restrictions or security threats. In this article, the no-fly zone is considered to be a cylinder zone with infinite altitude. 12 If the distance from each position of the trajectory to the center of the no-fly zone is larger than the radius of the no-fly zone, the no-fly zone constraint is considered to be satisfied. 24 Thus, the no-fly zone constraint can be given as follows

where
Terminal constraints
To ensure the successful flight in the terminal area energy management (TAEM) phase, the trajectory should satisfy some appropriate conditions at the TAEM interface. 30,31 The typical terminal conditions on the altitude, velocity, and range to the target for the RLV airdrop flight are set as follows

where hf and vf are the terminal altitude and velocity of RLV, respectively, and
In addition, it is desirable that the velocity vector at the TAEM interface should point closely toward the ALI. The terminal heading angle ψf constraint is given as

where
Finally, too large a final bank angle

where
The objective of the trajectory planning problem is to rapidly design a feasible trajectory from the initial position to the expected target, satisfying multiple flight constraints, including path constraints, terminal constraints, and geographic constraints for the airdrop RLV. It can be formulated as a feasible control problem, in which dynamics model is represented by equation (1), and multiple constraints are given in equations (3) and (11). Then, a novel online trajectory planning algorithm is developed in the next section to solve this problem.
Planning algorithm description
The total airdrop flight comprises the initial descent phase and the quasi-equilibrium glide (QEG) phase. 20 During the initial descent phase, there is essentially no capability for carrying out large lateral maneuvers and the path constraints are not taken into account, due to the low atmospheric density. Starting at the initial interface, the RLV is required to descend and enter the airdrop flight corridor for transiting smoothly to a QEGC profile. This transition point represents the terminal of the initial descent phase. To generate the initial descent trajectory, the flexible planning algorithms have been studied 11,20 and will not be discussed in this article. The QEG phase should ensure the satisfaction of the path constraints and terminal requirements, as well as executing lateral maneuvers to overfly the waypoints and avoid the no-fly zones. Therefore, we will focus on the trajectory planning of the glide phase below.
In this article, the nominal angle of attack profile is selected as piecewise linear functions of velocity and is described as follows

where V1 and V2 are the predefined velocity points of the profile, α1 is the angle of attack preselected according to the heating rate constraint, while α2 is predefined based on the range. The endpoint of the profile, αf, is designed according to the QEGC with the designed final bank angle σf and the terminal conditions
Based on the specified angle of attack, the path constraints of equations (3) to (5) are converted into altitude constraints, with the minimum altitude boundary obtained as follows

where,

The QEGC provides a simple, yet effective method of limiting the bank-angle profile to implement all the path constraints.

The upper and lower boundaries of bank angle.
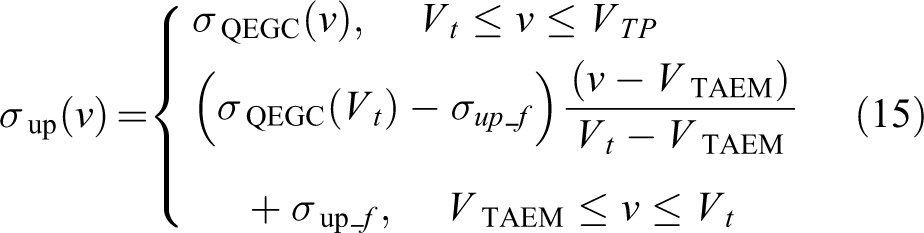
where VTP is the velocity at the terminal of the initial descent phase.

To observe the path constraints, a weighted combination of the lower and upper bounds of the bank angle is used to generate the bank angle profile. Along the airdrop flight trajectory, for any given v, the bank angle used for the trajectory integration is obtained as

where
The flowchart of the main blocks of the online trajectory planning algorithm is shown in Figure 3. After the planning of the initial descent phase, we need to determine the type of constraint that the RLV will face in the next subphase to adopt the corresponding planning algorithm. As the distance from the current position of the RLV to the predetermined waypoints, and to the tangent points of no-fly zones, can all be computed, the constraint closest to the current position is selected as the next constraint to be planned for. Only when all the geographic constraints have been successfully satisfied, the planning algorithm for terminal constraints will be employed.
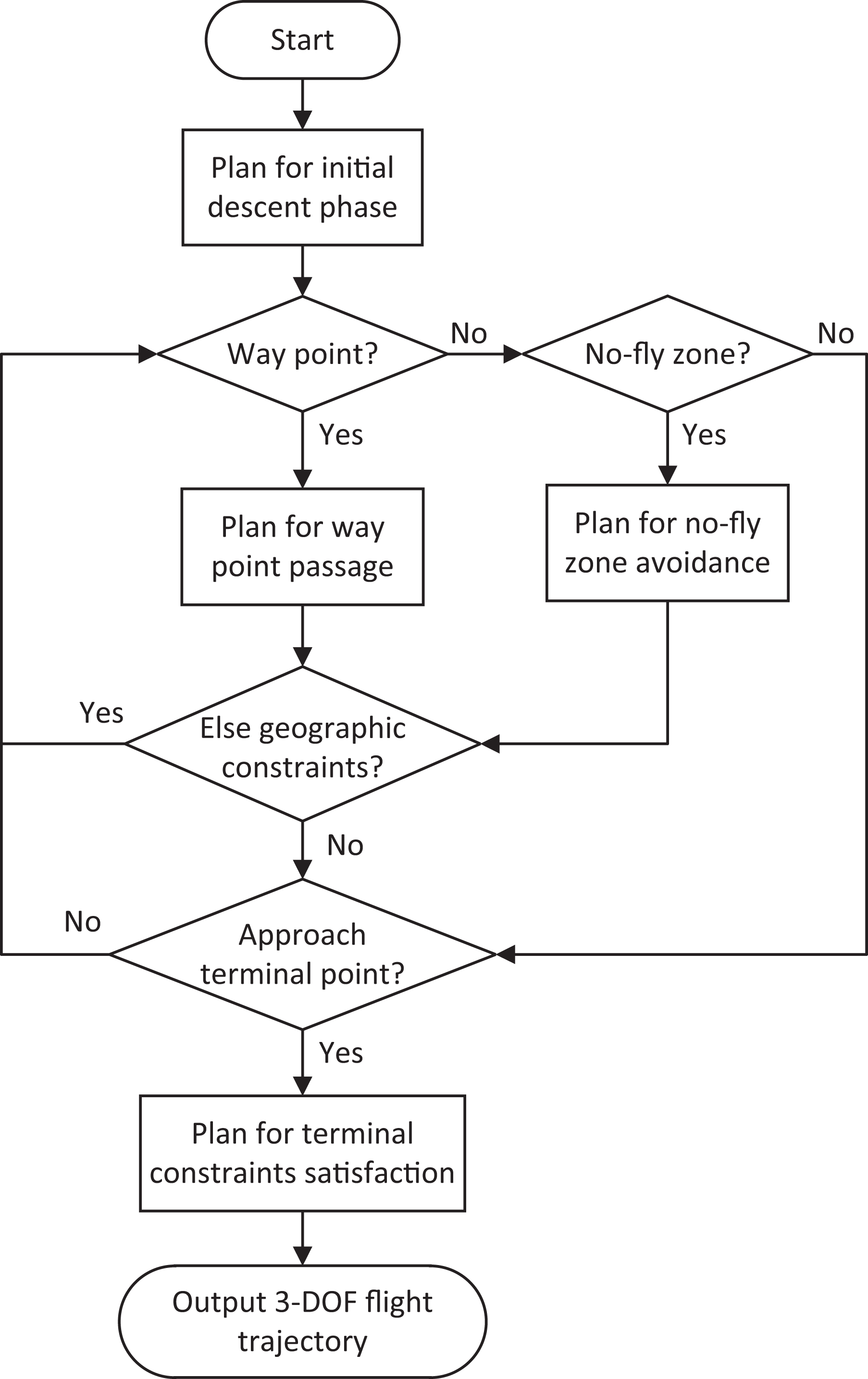
Flowchart of the online trajectory planning algorithm.
Passage strategy for waypoints
For each waypoint passage, the vehicle is allowed to cross the waypoint at different headings, hence the calculation of the expected heading at the waypoint presented in Liang et al. 32 is not required, which will save time. A single-bank-reversal logic is able to minimize the position error at the waypoint. 11 The bank-reversal strategy, with an appropriate longitude θT as the bank-reversal point, is expressed as follows

where

where
With the magnitude and sign of the bank angle specified by equations (17) and (18), the dynamics equations (1) are numerically integrated from the current condition to

Because θT has a large influence on the shape of the trajectory and determines the error fwp, the planning process for waypoint passage is actually a root-finding problem of solving for θT to satisfy the condition
Theorem 1
The existence of θT to satisfy

where
Proof
When
Two final longitudes, 

Schematic diagram for waypoint passage.
where the superscripts
Once this waypoint has been passed, the final states and control variables of this subphase can be regarded as the initial conditions of the next subphase. The same planning algorithm is then employed to pass the other waypoints, as per the flowchart in Figure 3.
Avoidance strategy for no-fly zones
As the bank reversal logic based on a reference point chosen near the no-fly zone, presented in Xie et al., 23 cannot guarantee total avoidance effectively, the single-bank-reversal logic is unacceptable in this subphase. Furthermore, the reversal strategy should minimize the energy consumption caused by avoidance, so as to arrive at the terminal target successfully. 33 Therefore, with the extension and simplification of the shuttle lateral guidance strategy, an avoidance strategy based on a dynamic heading-error corridor is used in this article. The most critical part of this strategy is the determination of the dynamic heading-error corridor, according to the relative position of the no-fly zone, reference point, and vehicle.
As seen in the schematic of a no-fly zone shown in Figure 5, we set the center and radius of the no-fly circular zone as 

Schematic of no-fly zone.
where
For example, the avoiding direction in Figure 5 is counterclockwise according to the definition. It should be noted that the avoiding direction is determined independently at the beginning of each no-fly-zone avoidance subphase and will not change until this subphase is completed. On this basis, ψA is determined by the left tangent when

where

where

Therefore, the minimum and maximum boundaries of heading ψ can be obtained according to the avoiding direction. If
Else if
where

where
Similar to the passage strategy for waypoints, the bank angle is generated by equations (17) and (29) and then numerically integrates the dynamics equations (1) from the current position until both of the following conditions are satisfied


where,
Plan for terminal constraints satisfaction
As per the flowchart in Figure 3, the planning algorithm for terminal constraint satisfaction will be employed when all the geographic constraints have been successfully satisfied. The TAEM interface point could be any position on the TAEM interface circle in which the terminal range-to-ALI is

where

where
The bank angle can be obtained by equation (17) and (32), and then the dynamics equations (1) are integrated from the initial state of the final subphase to

Because
Theorem 2
The existence of

where
Proof
According to the conditions in equation (34), we can get
Theorem 3
The existence of VT to satisfy

where
Proof
When
It can be easily understood from the planning algorithm that fS is monotonically increasing with

Simulation results
According to the combination of two types of geographic constraints: waypoint and no-fly zone, there are three kinds of situations in the airdrop flight: The first case is only waypoints constraints, the second one is only no-fly zone constraints, and the third one is that two types of constraints are both encountered. These three situations basically include all the possible problems in the actual flight process. The only difference is the number of geographic constraints considered for each problem. Therefore, three corresponding mission scenarios for the airdrop flight of one kind RLV 20,31 with different geographic constraints are developed for testing the proposed trajectory planning algorithm in this section.
The first mission is for flight with two waypoints and one no-fly zone constraints. The waypoints are located at (41.4°, 37.4°) and (59.4°, 47.4°). The no-fly zone is specified with the center at (56.4°, 36.4°) and a radius of 8°. In mission 2, five waypoints are predetermined, where the three waypoints are close to the target at longitudes and latitudes of (60.4°, 50.5°), (62.4°, 48.5°), and (64.4°, 46.5°), and the remaining two are relatively far at (47.4°, 41.5°) and (49.4°, 39.5°). The trajectory should pass one far waypoint and one close waypoint during the flight. Mission 3 is for flight with two no-fly zones. The no-fly zones are specified as follows: one with center (51.4°, 48.5°) and radius 8° and the other with center (67.4°, 41.5°) and radius 4.7°. Two cases are evaluated in mission 3 with the same initial conditions, except for the initial positions.
In the simulation, all the missions are constrained by the same peak heating rate of 800
The simulation environment are presented as follows: Computer CPU: Intel Core i3-2120 3.30 GHz Computer RAM: 4 GB DDR3 1333 MHz Operating System: Windows 7 32-bit Simulation Software: Microsoft Visual C++ 6.0
Nominal cases
The three nominal missions without any dispersions or uncertainties are simulated for the airdrop flight of RLV firstly, which is used to evaluate the performance of the proposed algorithm. The ground track for mission 1 in Figure 6 illustrates that the generated trajectory passes the waypoints and avoids the no-fly zone successfully. For the ground tracks in mission 2, shown in Figure 7, the four trajectories are obtained by passing different waypoint combinations with the same initial conditions. All the four trajectories satisfy the requirements of waypoint passage, with the position errors translated into distance on the ground, all less than 0.5 km. The ground tracks for mission 3 are shown in Figure 8. Trajectory 1 starts from the initial point where both the longitude and latitude are zero degrees, whereas that of trajectory 2 is (−29.2°, 42°). Two trajectories are generated with both no-fly zones avoided. The zoom-in view near the target ALI of the above three figures shows that the terminal range-to-go constraints of the three missions are well satisfied. The altitude and bank angle profiles for the three missions are shown in Figures 9 to 11. The altitude profiles illustrate that all path constraints, including waypoint and no-fly zone constraints, have been satisfied, and the trajectory phugoid oscillations can be further suppressed by broadening the boundaries of the bank angle if necessary. 31 It can be seen from the bank angle profiles that only a small number of bank reversals are conducted, and the magnitude of all the bank angle profiles decrease to approximately 10° toward the end. Table 2 lists the TAEM conditions for all three missions, which are also satisfied accurately. In the simulation, all the trajectories of the three missions are generated in 2–4 s (faster than other algorithms), which illustrates that the proposed trajectory planning algorithm can be used online for RLV airdrop flight guidance and control.

Ground track for mission 1.

Altitude and bank angle profiles for mission 1.

Ground track for mission 2.
Altitude and bank angle profiles for mission 2.

Ground track for mission 3.

Altitude and bank angle profiles for mission 3.
Terminal conditions achieved for the three missions.

Dispersion testing
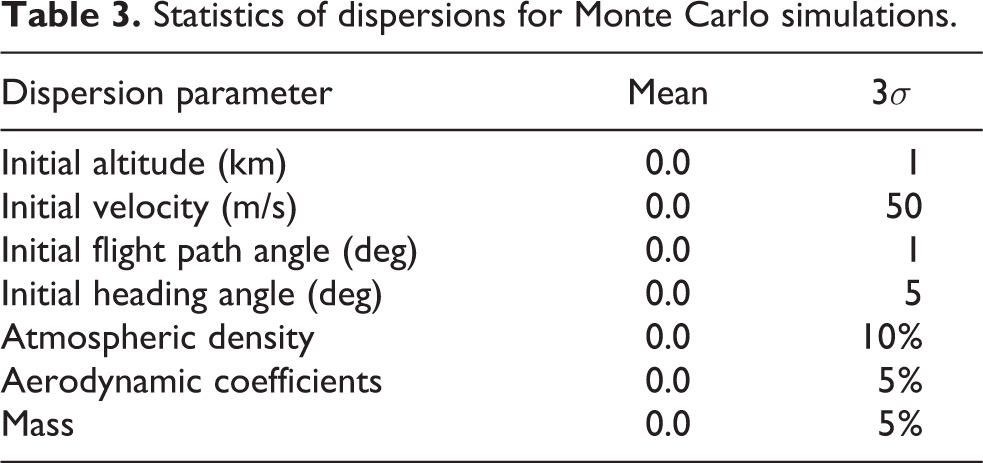
To further demonstrate the effectiveness and robustness of the planning algorithm proposed in this article, a dispersion study is conducted through a Monte Carlo simulation with a variety of common random dispersions in the airdrop flight. The perturbations of initial conditions, atmospheric density, vehicle aerodynamic coefficients, and mass properties are taken into account in the additional 1000 dispersion cases, and all subject to Gaussian distribution. The mean and
Statistics of dispersions for Monte Carlo simulations.
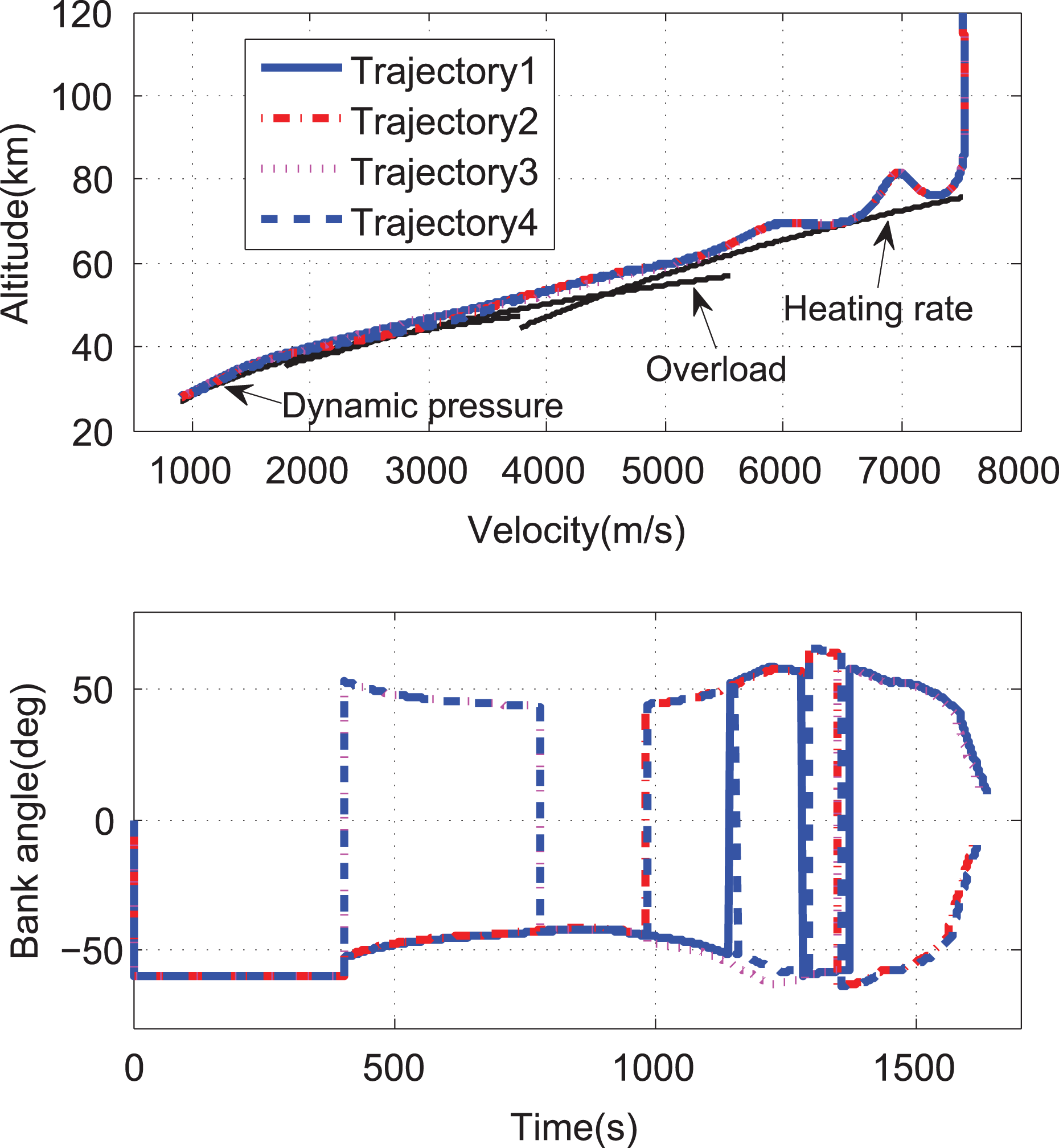
The dispersion simulation results are similar for all three missions, thus, only results of mission 1 are presented here. The ground tracks for mission 1 in the 1000 dispersion cases are presented in Figure 12, which shows that the trajectories have passed the waypoints and avoided the no-fly zone successfully. The altitude and bank angle profiles are plotted in Figure 13. The altitude profiles with the boundaries of the three path constraints illustrate the observance of the path constraints. The bank angle profiles show the satisfaction of the terminal bank angle constraint. Figure 14 illustrates a portion of the 100 km circle around the ALI and the tolerable error band of

Ground track of the 1000 dispersion cases.

Altitude and bank angle profiles of the 1000 dispersion cases.

Terminal position for the 1000 dispersion cases.
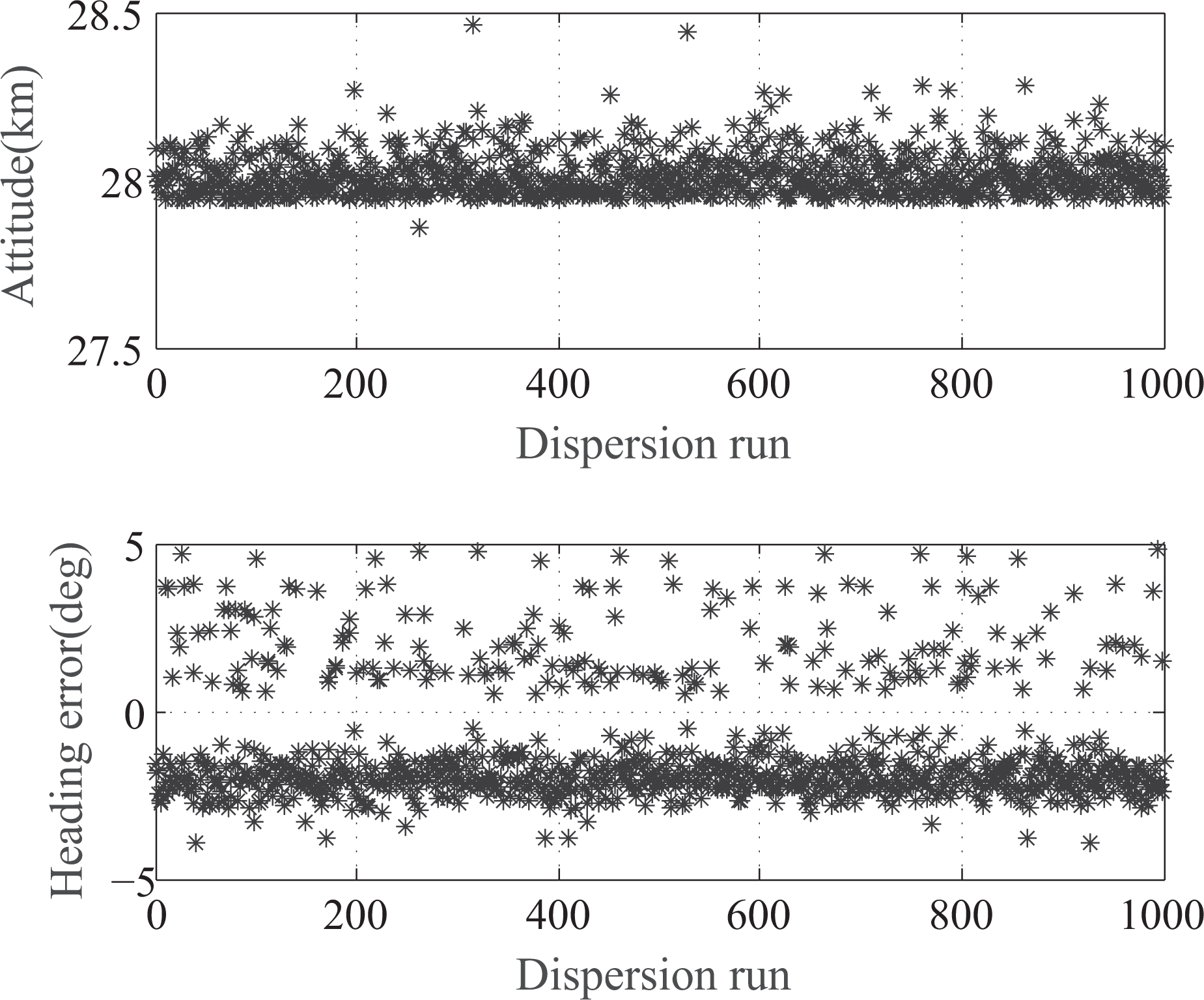
Terminal altitude and heading errors for the 1000 dispersion cases.
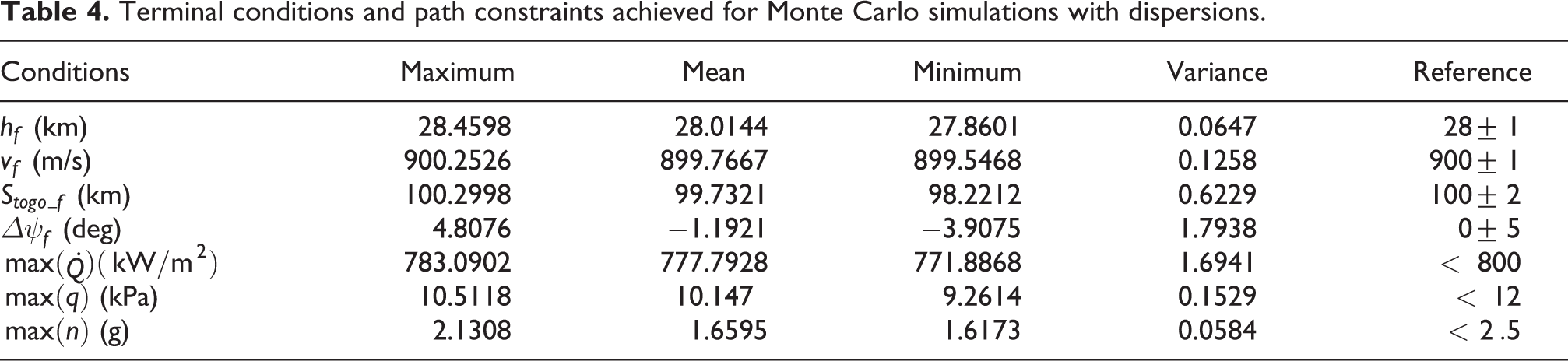
Terminal conditions and path constraints achieved for Monte Carlo simulations with dispersions.
Conclusions
The rapid trajectory planning approach of the RLV developed in this study is intended for the application to airdrop flights with waypoint and no-fly-zone constraints. The performance of the planning algorithm is assessed through three different missions, in a high-fidelity simulation environment. The simulation on nominal cases provides an experimental verification of the rapid trajectory planning principles and an assessment of how well the algorithm work in different mission scenarios. In addition, Monte Carlo simulation results demonstrate the effectiveness of the algorithm on enforcing path and geographic constraints and achieving desired terminal conditions with high precision, even in the presence of some complex compound deviations. The robustness and the calculation speed of this algorithm are better than other algorithms, which makes it suitable for online operation. Future study will be conducted on the further reduction of the algorithm complexity and the improvement of its accuracy and adaptability.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: National Natural Science Foundation of China (grant nos 61473124, 61573161, 61873319, and 61803111).