
Abstract
For the attitude tracking control problem of reentry reusable launch vehicle in reentry phase, a disturbance observer–based sliding mode controller is proposed in this article. At first, attitude model is decomposed into two loops on the basis of the engineering backgrounds of reusable launch vehicle and the multiple time-scale technique. Then, external disturbances and uncertainty are estimated by the disturbance observer, and sliding mode control scheme in the framework of backstepping technique is designed where sliding surfaces and sliding mode controllers are, respectively, designed for each loop. Based on Lyapunov stability theory, finite-time stability analysis is presented, in which attitude tracking error converges to the neighborhood around zero in finite time. Finally, simulations on the 6-degree-of-freedom reentry model are done to show the effectiveness of the proposed control scheme.
Introduction
Aerospace technology plays more and more important role in promoting the development of a country, and it is very attractive for the development prospect of aircraft. Reusable launch vehicle can be recovered and reused after each mission to dramatically reduce the cost of accessing space, and it has received a lot of attention in recent years. Reentry phase of the reusable launch vehicle (RLV) plays a very important role during the whole flight process. In this phase, because aircraft follows a predefined trajectory toward the designated landing point, traveling from space to the dense atmosphere of earth, RLV is subject to high levels of uncertainty and variations in key flight parameters. Thereby, it is critical for designing advanced guidance and control technologies to make the safety, reliability, and cost requirements of RLV. When the trajectories of RLV are designed, the prime focus is the heating constraint of the hypersonic phase. 1 And then the main task of reentry guidance is the on-board correction of flight path to compensate for disturbance and model uncertainty, where the effective guidance law is developed to provide the commanded angle of attack (AOA) and bank angle. To proceed, the next concern is the attitude tracking controller design. It is challenging for the attitude tracking controller design of RLV in reentry phase,2,3 since the altitude and Mach number vary from atmospheric entry at hypersonic speed to subsonic approach and landing, the dramatical changes of aircraft dynamics. There is much research on attitude control system design, 4 backstepping control,5,6 sliding mode control (SMC),7,8 trajectory linearization control (TLC),9,10 dynamic inversion technique (DI),11,12 state-dependent Riccati equation strategy (SDRE),13,14 and theta-D control.15,16 Besides, the concern of this work is to propose attitude control scheme to achieve the stable tracking of attitude angle’s guidance command. The flight control design for RLV is complex due to enormous amount of model parameter uncertainties, large external disturbances and complex path constraints exist during the reentry phase such as heating rate, structural loads and dynamic pressure. All the factors should be handled carefully for the safety of the reentry flight. The uncertain and highly nonlinear nature of its dynamics make the controller design difficult. Taking model uncertainties and large external disturbances into account reduces the flight control problem of RLV more complex. It should be pointed out that the control system of RLV is required to have robustness to tackle uncertainty for the sensitivity changes of flight conditions, uncertain aerodynamic characteristics, and highly nonlinear nature.
As we know that SMC is an effective approach to deal with parametric uncertainty and external disturbance,17,18 it has been applied in the flight control design of hypersonic vehicle. 19 In Wang et al., 19 the second-order dynamic SMC scheme is designed for the tracking control problem of underactuated hypersonic vehicle. After the model is divided into the minimum phase subsystem and the nonminimum phase subsystem, the conventional SMC and the second-order dynamic SMC scheme are developed, respectively, for those two subsystems. Although the nonminimum phase problem is considered, the uncertainty and disturbance are not considered. In Wang et al., 19 fuzzy terminal SMC scheme is developed for the near-space hypersonic vehicles. For the slow loop (attitude angle dynamic system) of the model, fuzzy variable domain control scheme is developed based on terminal sliding mode surface, the corresponding designed control scheme makes the attitude tracking error converges to zero. However, when the SMC is used, stability analysis is based on the known upper bounds of the uncertainties that may not be easily obtained in practical implementation, and it is an important clue to SMC.
What should be pointed out that the sign function of traditional SMC induces chattering problem which is the result of that the switching gain of sign function must be chosen larger than the bound of uncertainty. There are two main methods to alleviate the chattering problem, one is to replace the sign function with a continuous function, 20 where the disturbance rejection performance may be sacrificed to some extent. Another is to employ disturbance observer (DOB) to estimate the disturbance, the DOB technique was first proposed by Ohishi et al., 21 and it has received increasing amount of attention in the flight control design.22–24 Especially, it has been combined with SMC to design controller for the hypersonic vehicle.25–27 In Wang et al., 25 based on DOB, adaptive sliding mode backstepping attitude controller is designed for entry reusable launch vehicles, and the asymptotical tracking performance is obtained. Besides, in Sagliano et al. 26 and Xu et al., 27 the tracking controller for the longitudinal equations of motion of hypersonic vehicle is designed. In Sagliano et al., 26 the sliding mode observer-based sliding mode controller is proposed for the longitudinal equations of motion of an unpowered entry vehicle, where the DOB is the extended sliding mode observer and the controller is higher order sliding mode controller that needs input/output feedback linearization of longitudinal equations. But in our article, the sliding mode controller is designed without input/output feedback linearization. In Xu et al., 27 DOB-based neural-adaptive command-filtered backstepping controller is designed for the longitudinal equations of motion of hypersonic vehicle, where neural network (NN)-based DOB is employed to deal with the compounded uncertainty at the level of control design. The adopted DOB in our article does not use NNs, which is different from Xu et al. 27 Moreover, uncertain inertia matrix and external disturbance may also reduce the accuracy of the control system, and they should not be ignored during the control system design. It is not hard to only handle one of the above problems with some control approach, but once all the above factors are considered, the situation will be hard to deal with. Therefore, it is necessary to focus on the attitude tracking control problem with the simultaneous consideration of uncertain inertia matrix and external disturbance. Furthermore, since the attitude dynamics of RLV are highly nonlinear, the problem of how to design a high-precision finite-time attitude control law is a challenging work.
As aforementioned, the finite-time attitude tracking controller is proposed for RLV in reentry phase in the presence of uncertain inertia matrix and external disturbance. The difference of this article from previous work 28 and the main contribution is concluded as follows. In this article, based on the combination of backstepping control, SMC, and DOB, an finite-time attitude controller is designed for RLV with model uncertainty and external disturbance taken into account, while the attitude controller is designed on the basis of combining SMC and adaptive backstepping control in Zou et al. 28 At first, rather than design a filter in Zou et al., 28 the time derivative of virtual control input is taken as uncertainty to avoid “explosion of terms” problem inherent in backstepping control design procedure, which makes the controller design more simple. To sequel, to alleviate chattering problem of the traditional SMC, a DOB is used to estimate the lumped uncertainty in the design procedure of backstepping control, while in Zou et al., 28 adaptive law is used to estimate the unknown norm bound of the lumped uncertainty. At the same time, the disturbance rejection performance of closed-loop system can be maintained at the same time.
The outline of this article is as follows. Section “RLV model and COM” introduces the attitude model and control-oriented model (COM) of RLV, which are subsequently being used in simulation, controller design, and stability analysis. Then, in section “DOB-based finite-time control design” the DOB-based SMC scheme and stability analysis of the closed-loop system are given. In section “Simulation results” the effectiveness of the proposed scheme is evaluated via simulation. Finally, conclusions are given in section “Conclusion.”
RLV model and COM
During the reentry flight process, RLV dynamic is modeled as a 6-degree-of-freedom (6-DOF) motion which is composed of translational motion and rotational (attitude) motion. And the translational motion is used for generating trajectory and designing guidance law, where the equations of translational motion can be referred to. 29 Since our focus is the control scheme design, the translational equations of motion are not introduced herein. The attitude control design is mainly based on the rotational equations of motion. The attitude equations of motion are given as follows. 30
Attitude model






where states
RLV COM
As shown in equations (1)–(6), the states are coupled with the states of translation of motion, that is, there is complex coupling between the translational and rotational dynamics. To design controller simply, the COM is developed. Inspired by Wang et al., 31 the following COM can be obtained


Here,

The control objective of this article is to design controller for COM (equations (7) and (8)) to assure that attitude angle
DOB-based finite-time control design
From the backgrounds of RLV, we know that the change rate of the attitude angular rate is faster than that of attitude angle during the flight process, so it is reasonable to decompose the COM into fast loop (attitude angular rate loop) and slow loop (attitude angle loop). Then, by combining DOB with SMC, the controller is designed for each loop, where the DOB is applied to estimate the lumped uncertainty. The proposed DOB-based sliding mode attitude flight control structure for RLV is presented in Figure 1. In what follows, the virtual control input and the actual control input are designed.

Structure of DOB-based sliding mode control.
Attitude angle loop control design
In this section, the virtual control input is designed for the attitude angle loop (equation (7)). Although SMC has strong robustness for the nonlinear system with external disturbance, the switching gain of SMC needs to be selected large enough to cope with the disturbance if the bound of disturbance is not precisely estimated, which results in the chattering problem. In order to attenuate this problem, the nonlinear DOB technique is used to estimate the lumped disturbance. Define the attitude angle tracking error as

where

Here,

Here, the expression of lumped uncertainty

where the attitude angular rate error signal

and
Assumption 1
There is an unknown constant

where

It can be obtained that the estimation error of DOB (equation (15)) converges to a small neighborhood around zero if the parameters

Here,

where

Here, the generalized proportional integral (GPI) observer proposed in Sira-Ramírez et al.
33
is adopted as a DOB (equation (15)) to estimate

Here,

Remark 1
The differences of ESO and GPI observer are concluded as follows. ESO has linear and nonlinear forms, and it can be regarded as both state and DOB. But it only has a first-order extension, that is, one integrator to estimate the disturbance.
34
GPI observer is featured as a higher dimensional extension;
35
therefore, it has a better estimate performance on disturbances than that of ESO. What’s more, for the perturbed differentially flat nonlinear systems with measurable flat outputs, GPI observer is the most naturally applicable to the control design.
36
If

The difference between the DOB of this article and that of Sira-Ramírez et al. 37 is shown as following Remark 2.
Remark 2
First, these two DOBs (equations (15) and (21)) can estimate the disturbance effectively with the bounded estimation error which can be adjusted by tuning the observer parameters. Second, equation (15) can play as a state observer and a DOB, while equation (21) is only a DOB. Third, compared with equation (21) that is a first-order extension, equation (15) is a higher order extension, thus it has a better estimate performance to some extent. And equation (21) has a simpler structure than that of equation (15), which induces that equation (21) may have more application ability than that of equation (15). Third, equation (21) is influenced by the designed virtual input control
Attitude angular rate loop control design
In this section, finite-time controller is designed for attitude angular rate loop (equation (8)) on the basis of attitude angular rate error signal (equation (13)) and control input (equation (17)).
A sliding surface for attitude angle rate loop based on attitude angular rate error signal (equation (13)) is designed as

Here,
The derivative with respect to time along equation (13) is

where the lumped uncertainty

The following assumption is made for
Assumption 2
There is an unknown constant

where the estimate

It can be obtained that the estimation error of DOB (equation (26)) converges to a small neighborhood around zero if the parameters

Here,

where

Substituting equations (28) and (29) into equation (23), it becomes

Remark 3
The advantage of DOB-based controller compared with other robust controller is as follows. The DOB can be taken as a “patch” for the existing controller to improve the robustness and disturbance attenuation after the base-line controller is designed referred to the existing procedures. That is to say, there is no need to employ a complete new and different control strategy which demands a new verification and certification process. And the verification of DOB-based controller can be developed on the basis of the existing verification process to assure safety and reliability. What’s more, DOB-based controller is not a worst case-based design, while most of the existed robust control approaches are worst case-based design that has been criticized as being “over-conservative” where promising robustness is achieved at the price of the degraded nominal performance. For DOB-based control approach, the nominal performance of the base-line controller is recovered without disturbances or uncertainties.
In the next section, the stability analysis for the closed-loop system is carried out in the framework of Lyapunov stability theory.
Stability analysis
In this section, under the designed control scheme in the above section, stability analysis of the closed-loop system is presented by the following theorem.
Theorem 1
Consider the COM (equations (7) and (8)), satisfying Assumptions 1 and 2, under the control inputs (equations (17) and (28)) and DOBs (equations (19) and (26)), the sliding state reaches to an arbitrarily small neighborhood around zero (ASNZ) in finite time, and the attitude tracking error can be assured to converge to an ASNZ.
Proof
The proof contains three parts. The first part is the reachability analysis of the first sliding surface
1. The reachability analysis of the first sliding surface.
Choose the Lyapunov function for the first sliding surface as

Then, from equation (18), we can obtain

As long as

Referred to Bhat and Bernstein,
38
we can obtain that the sliding state

where
From above equation (34), we can obtain that if the parameters
2. The reachability analysis of the second sliding surface.
Choose the Lyapunov function for the second sliding surface as

From equation (30), we can obtain

The following analysis includes two cases: (a)
(a) If

As long as

with
From above equation (38), we can obtain that if the parameters
(b) If

where
As long as

where
From above equation (40), we can obtain that if the parameters
3. Stability analysis of the tracking error
Choose the Lyapunov function for attitude tracking error

From equations (7), (9), and (30), we can obtain

Based on equations (12), (13), and (17), the above equation becomes

Substituting equation (17) into equation (43), and based on equation (10), it yields

As long as

Referred to Bhat and Bernstein,
38
we can obtain that the attitude tracking error

where
Remark 4
If the uncertainty


Since equation (47) is the same as equation (7), then the virtual control input (equation (15)) and DOB (equation (17)) are designed for equation (47). Moreover, the actual control input (equation (28)) is designed for equation (48) and the same DOB expression (equation (26)) is designed for lumped uncertainty
Simulation results
To test the efficiency of the designed DOB-based sliding mode controller in the previous section, numerical simulations are performed on the X-33 6-DOF model. The initial flight conditions of the aircraft are set as shown in Table 1. And the normal inertial matrix and the external disturbances are given as
Initial flight condition.

AOA: angle of attack; FPA: flight path angle.
To evaluate the performance of the designed control scheme in coping with inertia matrix uncertainty and external disturbance. The following three cases simulations are done:
Case 1. Finite-time controller with model uncertainty and external disturbance.
Case 2. Finite-time controller without model uncertainty and external disturbance.
Case 3. Robust adaptive backstepping controller (RABC) 28 with model uncertainty and external disturbance.
Case 1 and case 2 are simulated to show the robustness of the designed control method. Case 2 and case 3 are simulated to show the superior control performance compared to the previous work. The controller parameters of case 1 are
Simulation results of case 1 and case 2 are shown in Figures 2–6, the local time history is also shown for the better demonstration of the dynamic process. It is obvious from Figures 2 and 3 that in both case 1 and case 2, under the designed control scheme, AOA, sideslip angle, and bank angle achieve the stable tracking of their respective guidance command in short time. And in case 1, the settling times for stable tracking of AOA, sideslip angle, and bank angle are less than 7, 4, and 4 s, respectively, which are almost equal to those of case 2. The time history of the sliding surfaces

Time history of attitude angle tracking in case 1 and case 2.
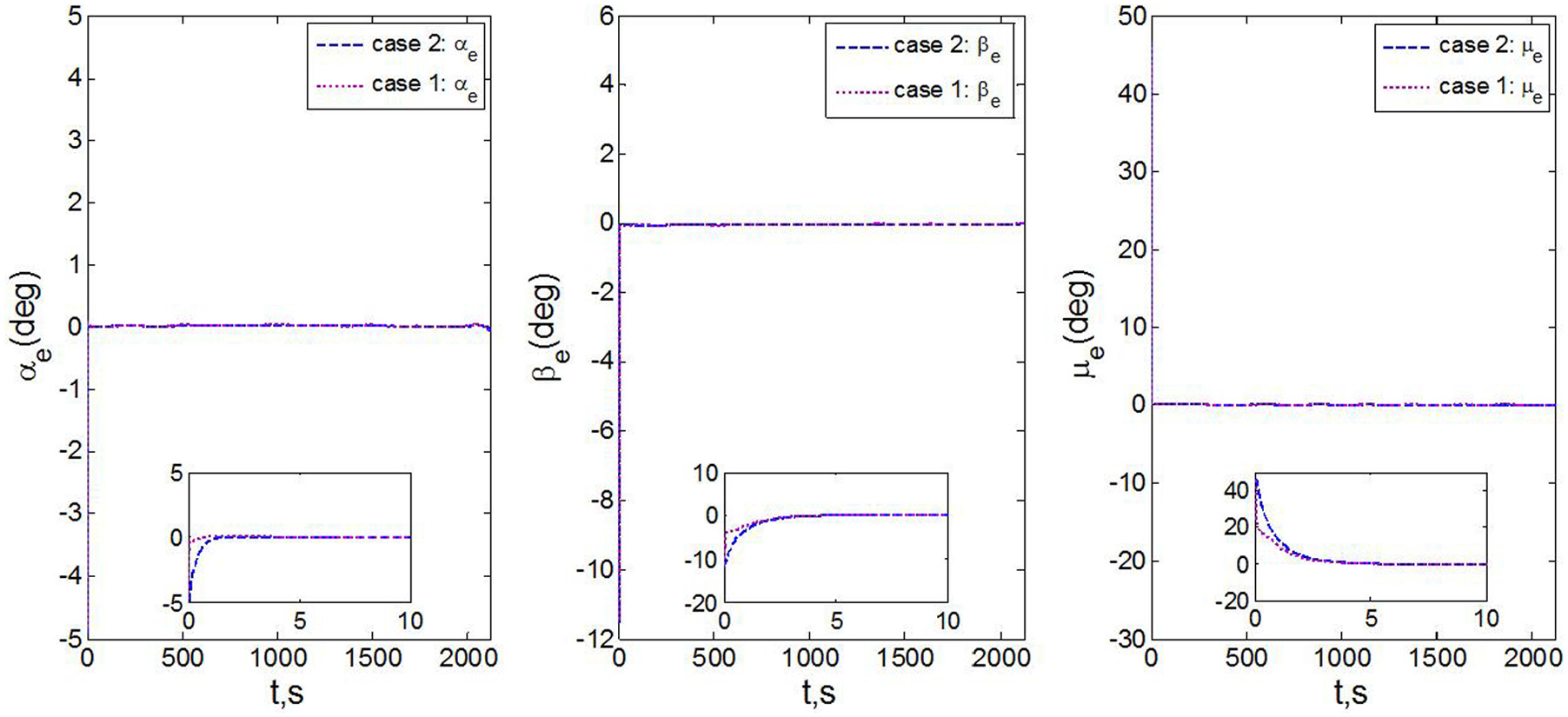
Time history of attitude angle tracking error in case 1 and case 2.
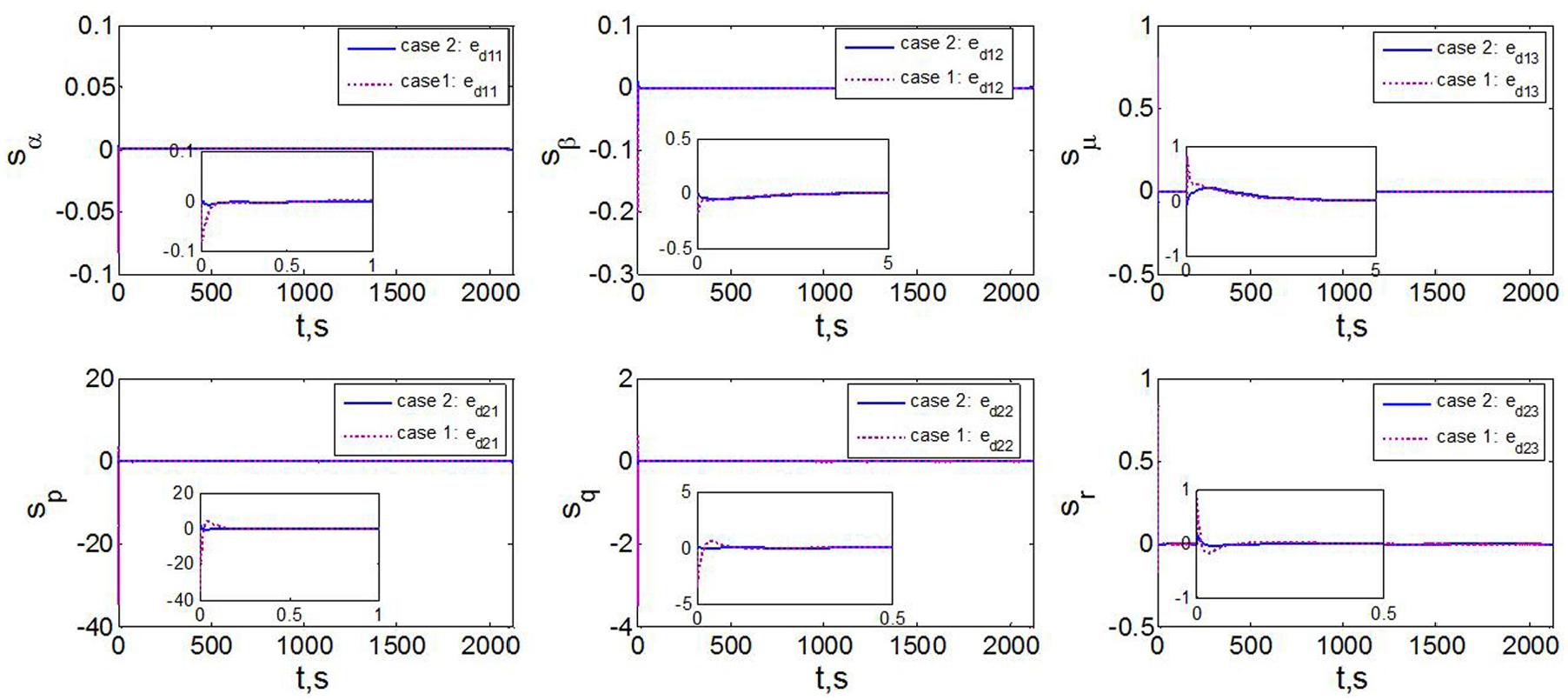
Time history of sliding surfaces

Time history of estimation errors

Time history of control input in case 1 and case 2.
Simulation results of case 2 and case 3 are shown in Figures 7–9. The following results are concluded. It is clear from Figures 7 and 8 that attitude angles follow their respective reference commands in both case 1 and case 3, and the settling times of case 1 are less than those of case 3. Moreover, the maximum absolute values of attitude tracking errors in case 1 are smaller than those of case 3. As can be observed from Figure 9 that the designed smooth control inputs in both two cases realize the stable tracking of the attitude angle reference commands in both two cases. But the maximum absolute values of the control inputs in case 1 are larger than those of case 3.

Time history of attitude angle tracking in case 1 and case 3.

Time history of attitude angle tracking error in case 1 and case 3.

Time history of control input in case 1 and case 3.
From above simulation results, we can conclude the advantage of the designed control scheme as follows. First, the designed control scheme has good robustness in handling uncertain inertia matrix and external disturbance, where no obvious steady state error exists and the tracking errors are small during the whole reentry flight. Second, by combining DOB and SMC, the designed controller achieve the faster stable tracking of guidance commands than that of RABC under the same influence of uncertain inertia matrix and external disturbance. And the tracking precision of the design controller is higher than that of RABC.
Conclusion
The attitude tracking control problem of RLV in reentry phase is investigated in this article. At the presence of external disturbances and model uncertainties, the designed DOB-based SMC scheme makes the attitude angles achieve the stable tracking in finite time, where the sliding state reaches to ASNZ in finite time, and the tracking error converges to the ASNZ in finite time. Besides, at the level of control design, the DOB technique estimates the lumped uncertainty effectively. Compared simulation results evaluate the effectiveness of the proposed control strategy.
Footnotes
Acknowledgements
The authors greatly appreciate the editor and all anonymous reviewers for their comments, which helped to improve the quality of this paper.
Handling Editor: Jose Antonio Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China (61503323 and 61673294), the Natural Science Foundation of Hebei Province (F2017203130 and E2015203232), the Postdoctoral Science Foundation of China (2015M571282 and 2015T80895), the Qinhuangdao Science and Technology Project (201502A178), The Young Teachers Independent Research Program of Yanshan University (14LGB027), The PhD Programs Foundation of Yanshan University (B928), and the Heavy Machinery Synergy Innovation Plan Project (ZX01-20140100-01).