
Abstract
Pedestrian evacuation and modification of traffic facilities were previously studied to increase the traffic efficiency and the safety of pedestrians. In this article, we first design a new robot-assisted pedestrian control scheme. We consider a different scenario that the inflow of all the entrances to the corridor can be controlled by mobile robots. Based on the collected image data of the experimental corridor, we obtain the regulated pedestrian velocity and build the relationship function between the adjustable motion frequency of the robot and the regulated pedestrian velocity. To achieve the optimal traffic flow in the designed scenario, we set up the macroscopic pedestrian model for the modified unidirectional pedestrian corridor with several controlled entrances. The pedestrian inflow of each entrance is controlled by adjusting the motion frequency of the robot moving in a transverse direction. Then the state feedback controller is designed and the stability of the controller is analyzed based on the Lyapunov stability theory. The theoretical analysis guides the movement of robots. Finally, the simulation results demonstrate the efficiency of the controlled pedestrian system. Our study can flexibly manage the pedestrian flow by applying advanced robotics technology on macro level, which can provide ideal global control effect.
Keywords
Introduction
Motivation
Pedestrian crowds aggregate in public places such as libraries and museums, which causes potential risks of crowd accidents in such densely populated environments. To reduce the congestion and enhance the traffic flow efficiency, it is necessary to regulate the pedestrian flow in densely populated transportation junctions or walkways. A lot of research work has investigated solutions to make the pedestrian flow more smooth, such as designing zigzag-shaped geometries, adding obstacles, changing partial travel directions, or opening temporary passageways. 1 However, once designed, modification of infrastructure in existing traffic systems is often expensive and difficult to be modified in real time.
In the 21st century, technology has changed the human lives. Optimization algorithms 2 –4 and intelligent control strategy 5,6 are widely used in various civilian and industrial systems. Artificial intelligence and machine learning make many ideas become realities. 7 –9 In modern traffic systems, mobile robots are applied into pedestrian flows to regulate the pedestrian passing speed. 10 –12 Researches are devoted to controlling the movement of mobile robots and designing the optimal moving trajectory. In the published papers, researches usually apply the optimal idea to manage the pedestrian system. 13 –15 For different pedestrian systems, the existing control methods need to be recalculated, which cannot provide desirable performance in real time.
In our study, we aim to design a controllable pedestrian system and apply robot-assisted pedestrian flow control idea to adjust the pedestrian flow, which is applicable in different pedestrian systems. For the pedestrian system studied in this article, an ideal system model and suitable controller can successfully manage mobile robots and obtain satisfactory control results of pedestrian flow. The existing work using mobile robots usually limits on microlevel, 16 which only focuses on the interactive or synergic movement problems between pedestrians and robots. The macroscopic problem needs to be given more consideration in our study.
In this article, considering the scenario that mobile robots are applied to manage the pedestrian flow from the controlled branches, we aim to obtain suitable traffic model on the macro level and design an effective controller for regulating pedestrian flows. We first establish the relationship function between the robot motion frequency and the velocity of the regulated pedestrians. Then we set up a macroscopic pedestrian model for the modified traffic corridor and design a feedback controller to efficiently adjust the pedestrian flow. Based on the precise control model, the satisfactory control results can conveniently provide the guidance information for the mobile robots in the corridor and effectively manage the pedestrian flow, which can obtain better global control effect. The proposed modeling and control approach in this article is very useful in many kinds of robot-assisted control systems.
Related work
The study of pedestrian dynamics has attracted increasing attention among researchers, which can be used by engineers to design evacuation facilities and to control the traffic density. In 1970s, Henderson compared measurements of pedestrian flows with Navier–Stokes equations and achieved considerable success. 17 There are several well-known models in the pedestrian evacuation, which are mainly divided into two categories: microscopic level 18,19 and macroscopic level. 17,20
The microscopic models, such as lattice gas (LG) model, 18,19,21,22 cellular automaton (CA) model, 23,24 social force model, 25 –27 and agent-based model, 28 etc deal with the movement and interactions of the individual pedestrians. LG model and CA model are based on movement rules. LG model was proposed by Muramatsu, which was used to simulate pedestrian flow in two-dimensional traffic environment. 21,22 CA model applied the parallel update rules, so the pedestrians can synchronously update their target grid point and position. 23,24,29 Another kind of microscopic model is the social force model, 25 which is mainly based on self-driving and interaction forces according to Newton’s second law. Several research work has made improvements on the original social force model. 26,27,30 The microscopic models deal with the movement and interactions of the individual pedestrians, whereas the macroscopic models typically regard the pedestrian flow as a continuum.
In the macroscopic models, researchers focused more on the pedestrian flow density and traffic velocity. The models of pedestrian flows described by the macroscopic model can be applied to develop control for the efficient evacuation. After Henderson proposed the macroscopic pedestrian model, 17 various contributions on intelligent pedestrian systems with modified macroscopic models were presented for different objectives and environments. 13 –15,31 Apoorva applied macroscopic models and the optimization theory in several different corridor scenarios. Their group provided some approaches to compute optimal feedback flow rates for the real-time automated pedestrian evacuation guidance system. 13 –15
Robot-assisted control has been studied in different areas for the past decade. The research of interaction between robots and humans has attracted increasing attention among researchers. Using mobile robots is an efficient method to regulate pedestrians in densely populated situations. 10 Okada et al. applied dynamic interaction between self-organized pedestrian and the robot to control pedestrian flows. 32,33 In 2012, a new model was proposed for guiding people in urban settings using multiple robots that work cooperatively. 30 Zeng proposed a hybrid approach (route search and social force-based approach) for modeling the pedestrian movement at signalized crosswalks. 27
In the recent studies, different kinds of robot guide were designed to regulate the pedestrian flow. In the work by Trulls et al., 34 pedestrians were modeled as moving obstacles, and a robot navigation method was proposed to obtain the collision-free robot motion in the presence of moving obstacles. In Wang et al. 35 work, a combined kinematic/dynamic control was proposed to make the robot follow the target social force model, given the kinematic velocity constraints. These researches focused on the interactive problem or synergic movement problem. In our work, we will consider the pedestrian evacuation on the macro level, which can obtain better global control effect.
Contribution
In the existing traffic systems, it is difficult to change the road facilities in real time. The existing work is mainly based on the open-loop control or the optimal control, so the robot’s motion is not easily reconfigurable once designed. Considering the recent advancement in camera technology where the measurement of pedestrian flow can be calculated in real time, our group set up an experimental scenario and applied robots moving in the transverse direction in the corridor to regulate the pedestrian flows. 9,11,36 We utilized the pedestrian motion tracking system to record the pedestrians’ collective motion. The experimental results show that the pedestrians’ overall speed is slowed down in the presence of the mobile robot, and the faster the robot moves, the lower the average pedestrian velocity becomes.
In this article, we also apply robots moving in the transverse direction in the corridor to regulate the pedestrian flows. We aim to set up the dynamic robot-assisted pedestrian flow model on the macro level and design a state feedback controller to regulate the overall traffic flow in the controlled corridor. Compared with other fixed facilities, it is more convenient to be realized in actual traffic systems as well as improve the traffic flow efficiency in real time.
First, we analyze the pedestrian flow data from the motion tracking system and obtain the fitting function specifying the relationship between the regulated pedestrian velocity and the adjustable robot motion frequency. Then applying the fitting function, we set up the dynamic model on the macro level and design a state feedback controller to regulate the traffic flow from the controlled entrances. The theoretical derivation based on Lyapunov stability theory and numerical simulations demonstrate the correctness of the proposed method.
The remainder of the article is organized as follows. In the second section, we use the least square fitting method to obtain the function between the pedestrian velocity and the robot motion frequency. Then we set up the macroscopic control model for the modified pedestrian corridor and normalize the control system. In the third section, based on the state feedback control idea, we design the feedback controller and deduce the stability of the controlled system based on the Lyapunov stability theory. In the fourth section 4, we simulate an actual traffic corridor and set the model parameters under two different kinds of initial conditions. Then simulation results verify the correctness of the controlled pedestrian system. The conclusion and future work are presented in the fifth section.
Problem formulation
A robot-assisted controlled pedestrian corridor
The existing articles usually apply optimization methods to regulate the pedestrian flow. In this article, we consider all the entrances to be controlled by the robot, so the modified corridor is considered as a control system on the macro level. In this section, we first set up the control system model for the modified corridor with several controlled entrances. After the model of the traffic system is proposed and normalized, we design the controller in the third section.
Figure 1 shows the structure of the corridor which is composed of several controlled entrances and one exit. This kind of corridor is very common in many stadiums and traffic systems. Ignoring a small number of reverse pedestrian flow, we mainly consider the corridor as a unidirectional traffic system. The robots move in each entrance with adjustable speed controlled by the computer. The pedestrians treat mobile robots as obstacles and try to avoid collisions with robots when passing by them. The more quickly robots transversely move, the less pedestrians enter the corridor.
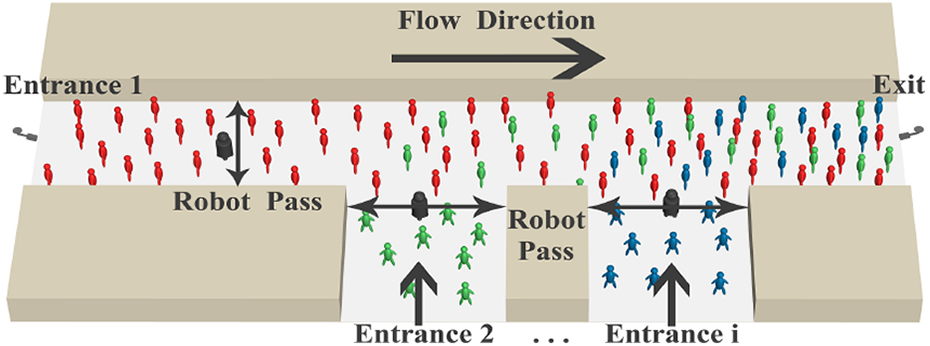
Structure of modified pedestrian corridor. Pedestrians enter the corridor from the left and bottom entrances and leave it from the right exit.
Define the robot state as

where

where A is the maximum displacement of robot position from the center of the corridor, and Ω is the piecewise constant robot motion frequency which can be modified in real time.
To describe the relationship between the pedestrian velocity and the robot motion frequency, we use the motion tracking system in the real-world corridor environment to collect the pedestrian velocity data. The critical density in the corridor is given by

Snapshots of the experimental procedure. A set of mobile robot platform is used. The maximum speed of the robot is 2.5 m/s. Pedestrians walk through the corridor and the mobile robots transversely move in the crowd. In the test scenario, the detection system recognizes the pedestrians and marks them in green blocks. The walking speed of each pedestrian is obtained and then the average velocity is calculated.
The least square fitting method is used here. If we choose the first-order fitting function, it is described by

where
If we choose the second-order fitting function, it is described by

where
Figure 3 shows the average pedestrian velocity versus the robot motion frequency. Both the first-order and the second-order fitting function are very close to the measured data. For the convenience of the following analysis and discussion, we choose the first-order function (3) as the fitting function.

Collection data and fitting functions. The red solid curve is the first-order fitting function. The black dotted one is the second-order fitting function. They are close to the collection data.
To briefly analyze the pedestrian model, the structure of Figure 1 can be abstracted in Figure 4. The whole given corridor is divided by i sections connected with each entrance. In the unidirectional corridor, all the pedestrians will enter the corridor and walk from left to right and then leave from the right exit.

Simplified plot of modified pedestrian corridor.
In the proposed pedestrian regulation scheme, the pedestrian flow is controlled without changing existing building structures, which is easy to implement in actual traffic systems. The red arrows in Figure 4 indicate the entering direction of pedestrians from the controlled entrances. The green arrow indicates the flow direction in the corridor. The purple arrow indicates the exit direction. The blue double-headed arrows indicate the bidirectional robot movements. We define system parameters as follows:
ρi denotes the pedestrian density in the i th section.
qi denotes the pedestrian flow in the i th section.
We consider that every section of the corridor has the same width, and the width W of every section is set to be 1. The following equation shows the relationship between the pedestrian density and the flow velocity in the i th section 14 :

From equations (3) and (5), the pedestrian flow from the entrance is

where
We write the conservation of pedestrians equation for the corridor 14 :

where

where
It is a common phenomenon that more crowded the environment is, the higher the density of pedestrians is and the lower the flow speed is. According to the Greensheilds model, 14,37 the relationship between the flow velocity and density in the corridor is described by

where
From equations (5) and (9), we obtain

For the Greenshields model, 14,37 the relationship between the maximum pedestrian flow qm and the critical density ρm is

From equations (8) and (10), the following differential equation can be obtained to express the time evolution of pedestrian densities ρi

where
Normalization and the dynamic model
To simplify the relationship between system parameters, we normalize the variables of the corridor flow model. The normalized density

From definition (13), we get
According to equation (10) and definitions (13) and (14), the normalized flow is expressed by the following equation

where

where
From equation (11) and definitions (13), (15), and (16), we can obtain the relationship between

The relationship between
After normalization, we get

Similarly,

where
Control problem formulation
Here, we consider equation (18) as a control system, where

where
From definition (13), we get
We are interested to obtain the optimal control result with the highest pedestrian flows. According to Figure 5, if
The system (19) is equivalent to the pedestrian system (12). In the third section, we design the controller by applying the strategy of feedback control. The designed controller is also suitable to system (12).
Feedback controller design
The first-order system and controller design
First, we design the controller for the first-order autonomous subsystem:

In this situation, the modified corridor has only one controlled entrance. We aim to keep the total pedestrian flow close to the maximum value by controlling the pedestrian flow from the first controlled entrance. Accordingly, we will design controller u
1 to make
Theorem 1
If the controller is designed as

and the parameters satisfy
Proof
Under the controller (21), subsystem (20) is equivalent to

Our target is that state x
1 converges to 0.5. So we set

Define the Lyapunov function as

Obviously, we get

Only if
Take the derivative of function (24)

When
According to the Lyapunov stability theorem, when
According to equation (16), if the following condition is satisfied, we can get the maximum value of the pedestrian flow in the first section of the corridor

So the robot motion frequency in the first entrance should be

The i th-order system and controller design
Here, we extend the order of the control system to increase the controlled entrances. We design the controller for the i th-order controlled system

where
Theorem 2
If the controller is designed as

where
Proof
Using the controller (28), the first-order of the controlled system is the same as the controller (22). The higher order controlled system (27) becomes

where
From equations (22) and (29), the whole controlled system (27) is equivalent to

where
Set

where
We define the Lyapunov function as

where
Obviously, we get

Only if
Take the derivative of function (31)

where
When

Hence, if

where
Therefore, we get

According to the Lyapunov stability theorem, when
We can get robots motion frequencies in the whole corridor are

where
Simulation results
Experimental parameters setting
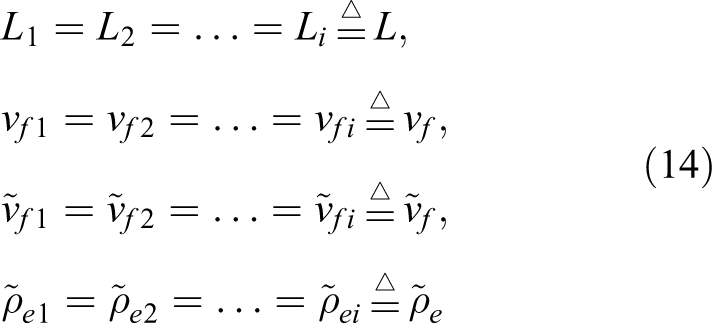
In this section, we consider an actual pedestrian corridor and set some specific values for the designed corridor to verify the accuracy of the theoretical analysis. Numerical simulations are performed with two different initial conditions. In the first condition, we consider the sparse pedestrian flow at the initial time and then the congested one in the second condition.
We set

So the parameter d belongs to
The critical density is set as
According to equation (11), we can get the maximum value

From equation (15), we can get the maximun control value

We get the actual pedestrian flow in the corridor

where
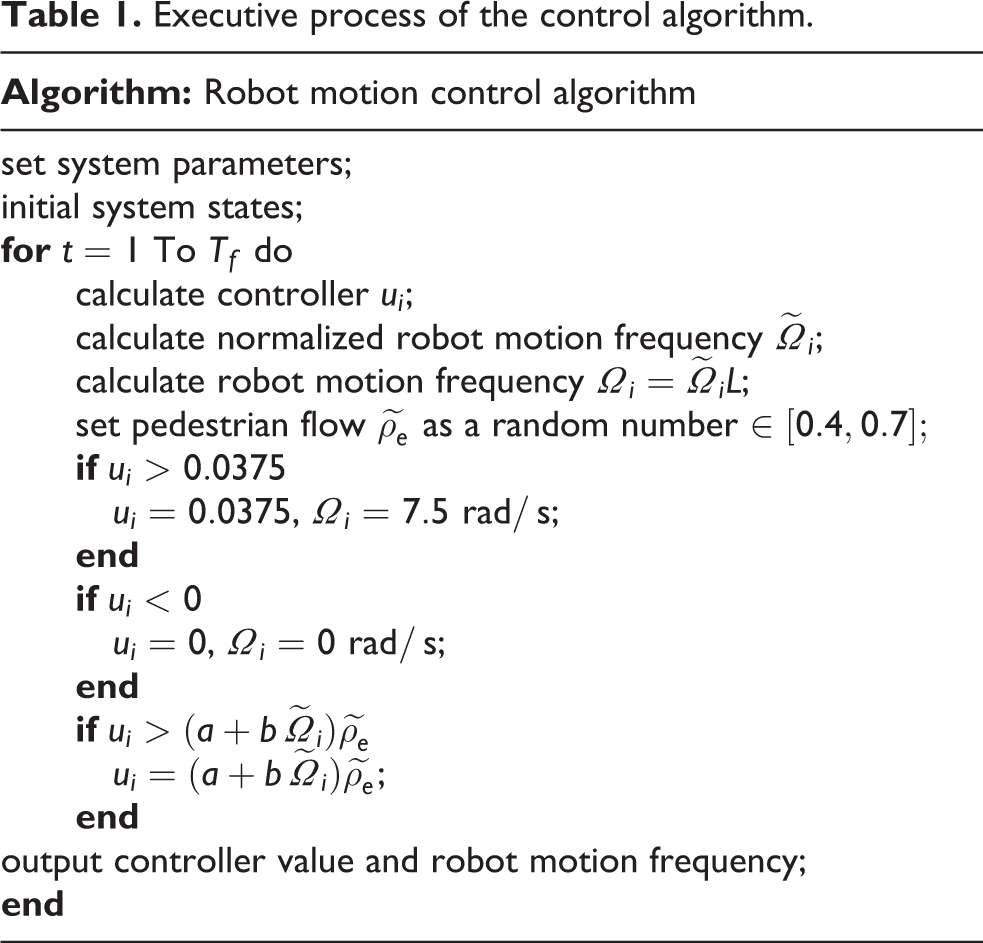
For the real robot system, we should limit the motion frequency
Executive process of the control algorithm.
Simulation of sparse corridor
In controller (28), we set
We plot the temporal evaluation of system states xi
in Figure 6. It shows that all the system states xi
converge to 0.5 in 20 s, that is, the normalized pedestrian densities
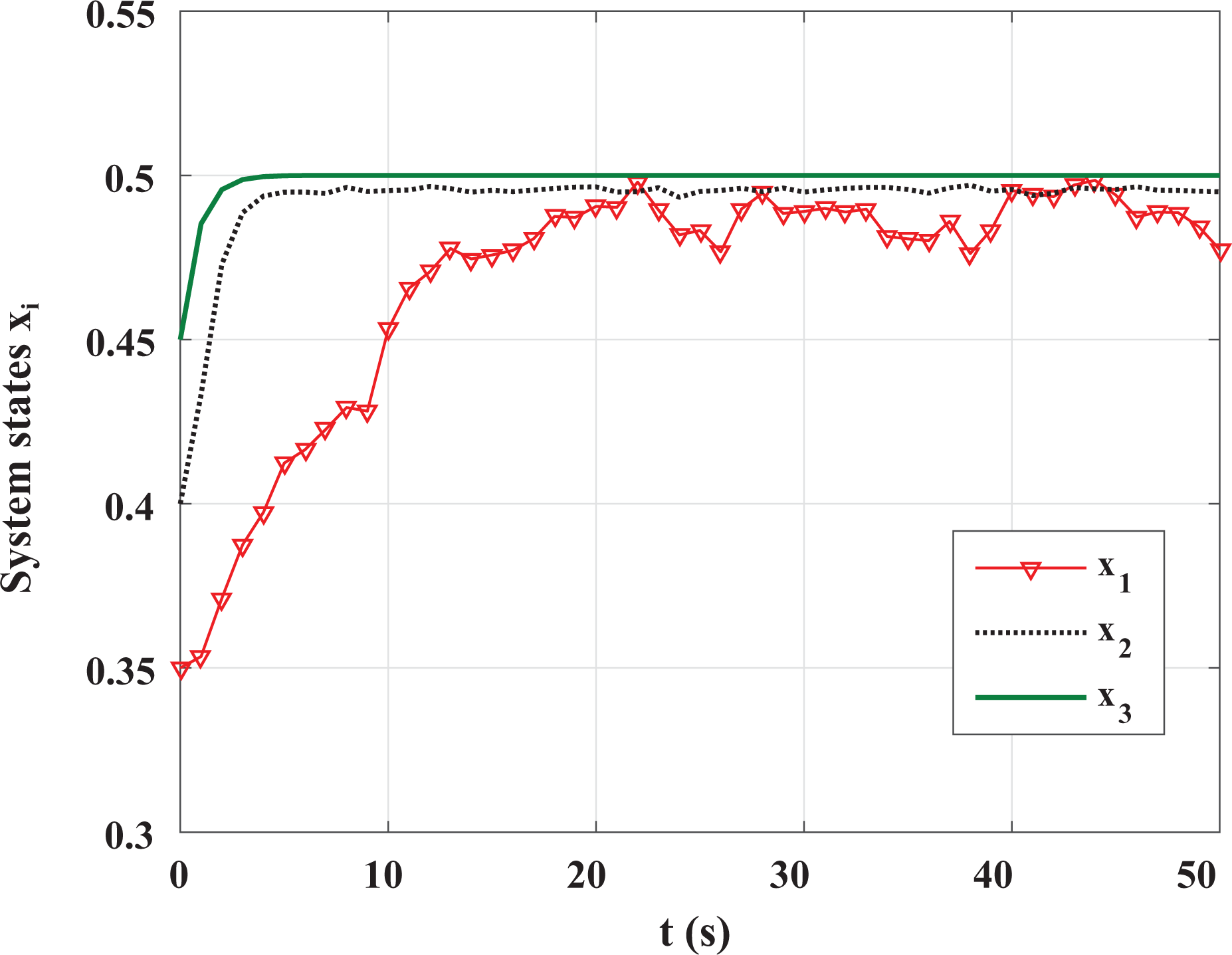
Temporal evolution of system states xi when initial values are less than the optimal value.
From equation (36), we calculate the temporal evolution of the pedestrian flows in three sections, and plot the results in Figure 7. It shows that the pedestrian flow in every section is close to the maximum flow value 1.425
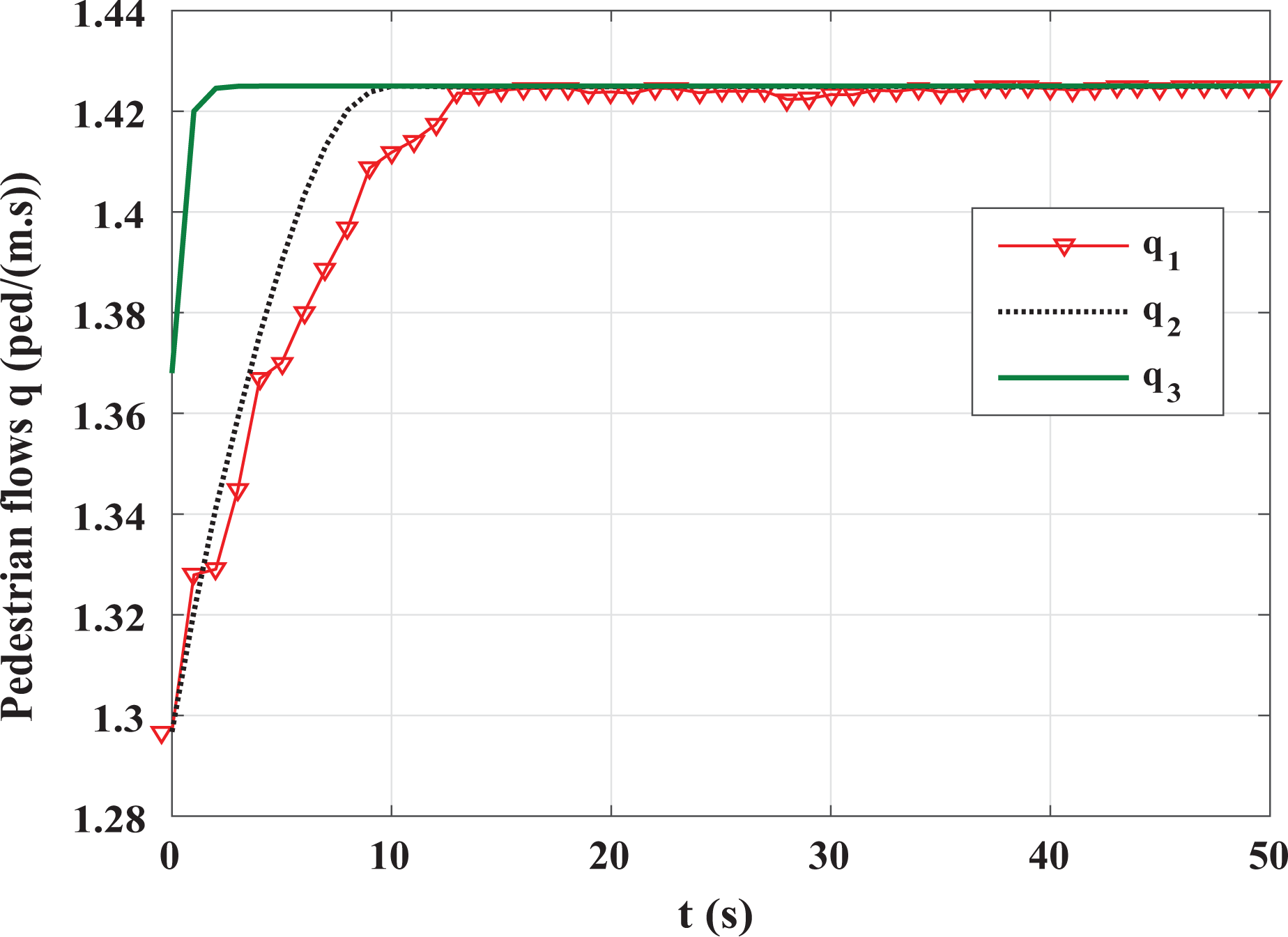
Temporal evolution of pedestrian flows qi when initial values are less than the optimal value.
According to equation (32), we plot the temporal evolution of the robot motion frequency during the control process in Figure 8. It shows that the motion frequency tends to be stable to keep the pedestrian flow and the passing efficiency. From 0 to 15 s, the pedestrian density in the first section is lower than the optimal value, so the robot in the first entrance remain stationary and pedestrians can enter the entrance freely. Then from 15 to 25 s, the pedestrian density in the first section is close to the optimal value, so the robot begins to move and the motion frequency Ω
1 approaches to 3.5

Temporal evolution of robot motion frequency Ωi when initial values are less than the optimal value.
In Figure 9, we plot the snapshots of the pedestrian distribution in the controlled corridor at

Sketch diagrams of the pedestrian distribution in the controlled corridor when initial values are less than the optimal value.
Simulation in congested initial condition
Here, the initial state values of system (27) are set as
We plot the system states in Figure 10, which shows that all the system states xi
gradually reduce to 0.5 in 25 s. Therefore, our controllers can restrict the pedestrian flow at the entrance in each section to reduce the density. Also, applying equation (36), we draw the pedestrian flows in every section of the corridor in Figure 11. It shows that the pedestrian flow converges to

Temporal evolution of system states xi when initial values are higher than the optimal value.

Temporal evolution of pedestrian flows qi when initial values are higher than the optimal value.
Figure 12 also shows the temporal evolution of robot motion frequency Ωi
. From 0 to 25 s, the robot in the first entrance gradually reduces the motion frequency with decreasing pedestrian flows. After 25 s, the average value of the robot motion frequency Ω
1 is about 3.8

Temporal evolution of robot motion frequency
Finally, in Figure 13, we plot the snapshots of the pedestrian distribution at

Sketch diagrams of the pedestrian distribution in the controlled corridor when initial values are more than the optimal value.
From the simulations of two different conditions, we have the conclusion that the proposed controller successfully regulates the pedestrian flow and achieves the satisfactory traffic efficiency with different initial conditions of the system state.
Conclusion
In this article, we consider the pedestrian flow control problem in a modified corridor where the inflow at each entrance is controllable using mobile robots.
Applying the robot-assisted pedestrian flow control method, we establish the relationship between the robot motion and the pedestrian passing flow based on real-world experiments using image processing techniques. With the dynamic model equations, we design the controller and analyze the stability of the controlled system based on the Lyapunov stability theory. Simulation results in two different conditions demonstrate the efficiency of our proposed method in controlling the pedestrian system. Compared with the microcontrol method, we can achieve satisfactory global control effect by applying the proposed macro control method.
We only consider the pedestrian traffic in a traditional intersection structure, the delay problem will be considered in the future work. Moreover, we will take into account other pedestrian traffic systems and implement our control methods in the robot operating system platform.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by China Scholarship Council Fund (201606845005).