
Abstract
Rehabilitation robots are a new technology dedicated to the physiotherapy and assistance motion and has aroused great interest in the scientific community. These kinds of robots have shown a high potential in limiting the patient’s disability, increasing its functional movements and helping him/her in daily living activities. This technology is still an emerging area and suffers from many challenges like compliance control and human–robot collaboration. The main challenge addressed in this research is to ensure that the exoskeleton robot provides an appropriate compliance control that allows it to interact perfectly with humans. This article investigates a new compliant control based on a second-order sliding mode with adaptive-gain incorporating time delay estimation. The control uses human inverse kinematics to complete active rehabilitation protocols for an exoskeleton robot with unknown dynamics and unforeseen disturbances. The stability analysis is formulated and demonstrated based on Lyapunov function. An experimental physiotherapy session with three healthy subjects was set up to test the effectiveness of the proposed control, using virtual reality environment.
Keywords
Introduction
Many types of injury such as structural defects, cerebral palsy, brain tumors, spinal injury, multiple sclerosis, or other neurological diseases can damage the human nervous system, which means loss of the functional capacity. 1 –3 In paralyzed patients, maximum capacity can be restored through physical therapy applications and robotic devices. 1 –5 The purpose of the physical therapy and the neural rehabilitation program is to help the patient achieve the best possible condition and to gain independence of his functions to minimize or to eventually eliminate the problems that might arise from the disease. The employment of robotic devices, known as rehabilitation robots, in assistive domains has demonstrated a high potential to improve the functional movements and to assist her/him in daily living activities such as self-care skills. 4 A rehabilitation exoskeleton robot is an articulated mechanical structure with several degrees of freedom (DOFs) having the same anatomy of the human arm. 4 –8 Unlike prostheses that replace a limb of the body, the exoskeleton robot clings to it externally and acts in parallel. It can be dedicated to a specific part of the body such as the hand, arm, leg, or several limbs at the same time. Equipped with sensors and actuators, it measures the movements and forces of the user, and it produces a force to interact dynamically with its wearer.
There are different levels of robotic assistance strategies used after the neurological accidents to provide suitable physical therapy. The most urgent, usually the first 6 weeks after the accident, is passive physical therapy. 1,5 In this type of therapy, the exoskeleton brings the patient’s limb, which is completely passive, to realize a therapy task. Its advantage is based on the robot’s ability to provide intensive therapy over a long period of time. 9,10 The next types of therapy, active-assisted and active modes, allow the patient to voluntarily initiate movement. Then, the exoskeleton’s wearer can perform a free motion (active mode), the robot corrects or guides this movement (active-assisted mode). In the latter case, the robot limits the tremors or corrects the trajectory. After detecting the initiation of a motion, usually predetermined, the robot will guide the achievement of the activity, often using an impedance and/or admittance control. 11,12 Additionally, these strategies can be utilized for the evaluation or the study of subject movements. In these modes, theoretically, the patient should not feel the presence of the exoskeleton robot. This is known as robot transparency. Therefore, the subject is completely active and the exoskeleton robot should not affect the movement.
In this research, we focus on active motion control. This type of control is particularly suited to rehabilitation phases where the patient has partially recovered his mobility abilities. The goal is then to improve these abilities by encouraging him/her to use them. Usually, we focus to interpret the intention of the subject and the abilities that already recovered. A compliant control or indirect force control is an effective approach to accomplish this level of motion assistance. Its successful application appears when the exoskeleton is in free space and when it is in contact with the known or unknown environment. Admittance control is a typical choice for the rehabilitation application of compliance control. 12 –16 This control structure aims to create a dynamic relationship between a measured position (and its derivative) and the user’s force. The admittance scheme is implemented by two loops. The first one is the outer force that is responsible for creating the force–position relationship; it usually uses a first-order transfer function to define this relation. The second one is the inner position loop which must be as fast as possible. 17 Although this control is characterized by its robustness, thanks to the existing advanced tracking control (inner position loop), it also suffers from several drawbacks, such as imprecision of the desired performance of the control system or inaccuracy of conversion of the desired force to desired position dynamics. 17 The inaccuracy of the performance here is caused by the gain parameters of the first-order transfer function which is responsible for establishing a desired force–position relationship as given in previous studies. 17,18 Many admittance controls have been developed by estimating the user force directly from his biological signals. 19 –21 The most commonly used is the electromyography (EMG) signals, which are considered important signals to describe the user’s intention of motion. 19 –21 However, the sensor positioning to obtain the EMG signals is very sensitive, where the thickness of the skin, tiredness, and stress of the subject, even the temperature of the body, has a big influence on the performance of an EMG-based control. 22 More than that, the quantity of information from physiological signals and its nonlinearity is so large that it takes expensive calculations to process signals, which must be clear input signals for the control. 22
The inner position loop may be responsible for the inaccurate performance of the admittance control due to the limitation of the applied control tracking approach. 17 This limitation is related to the complicated design of this type of robots and their high number of DOF, where the dynamics of these robots is generally uncertain. 9,10 Furthermore, the contact dynamics of the robot and its wearer increases the unknown nonlinear uncertainties function. A sliding mode approach is one of the strategies that are widely applied on robotics systems, thanks to its attractive characteristics of robustness to nonlinear uncertainties and external disturbances. 23,24 The price to achieve this robustness is to control the undesirable chattering problem. 25 Many conventional approaches were developed to avoid this problem by replacing the discontinuous function by a continuous function (as a saturation function or sigmoid function) to ensure a continuous control. 23,26 But in this case, the sliding mode control loses its robustness to disturbances; here, the controller forces the sliding trajectories of the system to be close to the sliding surface, not on the sliding surface itself. New approaches have been developed to address the chattering dilemma such high order sliding mode controller 27,28 and a second-order sliding mode controller. 29 This latter allows a sliding surface and its derivative to get to zero and to maintain the discontinuous control under an integral function, which can attenuate the undesirable chattering. 30 This approach presents two advantages: the first one is to keep the robustness characteristic of standard sliding mode control, and the second one is to improve the accuracy of the control performance by attenuating the chattering problem. Nevertheless, the second time-derivative of the sliding surface might amplify the instability of the system, a risk that the nonlinear uncertainties and external disturbances present. Additionally, in physical therapy, usually the exoskeleton robot would perform with different subjects with different levels of neurological injuries. In this case, the control system would be influenced by the variation of parameters of the robot and change of subjects’ characteristics.
Main contribution
Motivated by the previous analysis, we propose a new adaptive-gain second-order sliding mode control combined with time delay estimation (TDE).
31
–34
This controller deals mainly with the accuracy/robustness problem of a compliant control applied to an exoskeleton robot with a high number (seven) of DOFs. The accuracy of the performance can be decreased within the outer loop (the force loop) due to the admittance function and/or sensibility of biological sensors signals, for example, EMG. To overcome these drawbacks, the article proposes a simple force loop based on human inverse kinematics.
35
Therefore, according to the force applied at the wrist joint by the subject, the force control loop produces a Cartesian displacement with respect to a constant proportional gain. In our case, the required position is the sum of this displacement and the actual Cartesian position. Unlike the existing methods, we use the human inverse kinematics algorithm developed in our previous work,
35
which is characterized by its accuracy and rapidity of response while avoiding singularities. This makes it possible to provide an accurate relation between desired force and desired position. On the other hand, the robustness of the performance can be negatively influenced within the inner loop (or tracking control loop), thanks to the applied control strategy. Despite the accuracy and robustness of second-order sliding mode control due to its potential to attenuate the undesired chattering dilemma.
30
However, the complicated mechanical structure of the robot and the variation of its parameters (due to the uncertainties function and unforeseen external forces due to the different subject’s characteristics) require a large switching gain to maintain the stability of the robot system, which again causes the chattering problem. To overcome these limitations, we incorporate the second-order sliding mode control with TDE to achieve an accurate performance of the exoskeleton robot with unknown dynamics and external disturbances. TDE can easily estimate the unknown dynamics and external disturbances with a simple control scheme without being affected by the size of the estimated parameters (high DOF).
36
It only employs one-step time-delayed knowledge about the previous state-response of the system and the previous control input to provide an accurate estimation of unknown dynamics and external perturbations. More than that, TDE is an easy approach in the real-time implementation. In addition, to cope with the variation of the characteristics of the subjects and to avoid the problem of undesirable chattering, a new adaptation law of the commutation gains is proposed. The stability of the robot system and the convergence of its errors are formulated and demonstrated based on Lyapunov function. The contribution of this article can be summarized in three points: A new compliant control is developed based on human inverse kinematics. This control ensures an accurate relation between the desired force and the desired position and produces human-like arm motion (outer control loop). TDE is used for the evaluation of the unknown dynamics and external disturbances (inner control loop). Adaptive gains are incorporated with a second-order sliding mode control to provide an adaptation of the switching gains and to avoid the undesired chattering (inner control loop).
The proposed control is evaluated experimentally with healthy subjects using a virtual environment (VE). 37 This VE is a very attractive tool bringing many benefits. 38 It allows the creation of immersive and interactive scenes where the oriented task can be introduced in the form of serious games. This interface also helps in stimulating the subjects by viewing the tasks performed. Finally, we present a comparative study with a conventional control approach that shows the accuracy, robustness, and flexibility of the proposed controller dealing with unknown dynamics, external disturbances, and parameter variations.
The rest of the article is organized as follows. The human inverse kinematics and dynamics of the exoskeleton are presented in the next section. The control scheme is described in the third section. Experimental and comparison results are shown in the fourth section; finally, the conclusion is presented in fifth section.
Ethics statement
In this research, ethics approval was not required as per École de Technologie Supérieure, Montreal, Canada and national regulations since the subjects are healthy (not real neurological patients) and no subjects were recruited other than the researchers working in this project. Also, written and informed consent was obtained from the research participants.
Characterization kinematics and dynamics of ETS-MARSE robot
Modeling of ETS-MARSE robot
To make the rehabilitation robot suitable for performing of a wide variety of daily-life activities with the ease of human–robot interaction, it must be designed to be in harmony with the human arm configuration. The ETS-MARSE is a redundant robot with 7 DOFs, as shown in Figure 1. It is designed to assist the impaired human right upper limb. The structure idea of the ETS-MARSE was extracted from the anatomy of the human arm to be in concordance with exoskeleton wearers along the physical therapy activities. The shoulder portion is described by three joints: The first two joints are created to produce the vertical and horizontal extension/flexion movement of the shoulder, while the third joint is aimed to conduct the internal and external rotation of the shoulder. The elbow portion is composed of one joint to complete the flexion/extension motion of the elbow. The wrist portion is composed of three joints: The first joint is shaped to perform pronation and supination motion of the forearm, the second joint and the third joint are dedicated to offering, respectively, ulnar/radial deviation and flexion/extension motions. 8,26 The robot system is implemented with a virtual interface in which the subject and the therapist can follow the motion of the rehabilitation tasks. 37 Virtual reality is a software environment created to simulate the subject and allow him to perform different physical therapy exercises. This virtual interface can also provide task-oriented activities in task space, Cartesian space, and free motion.
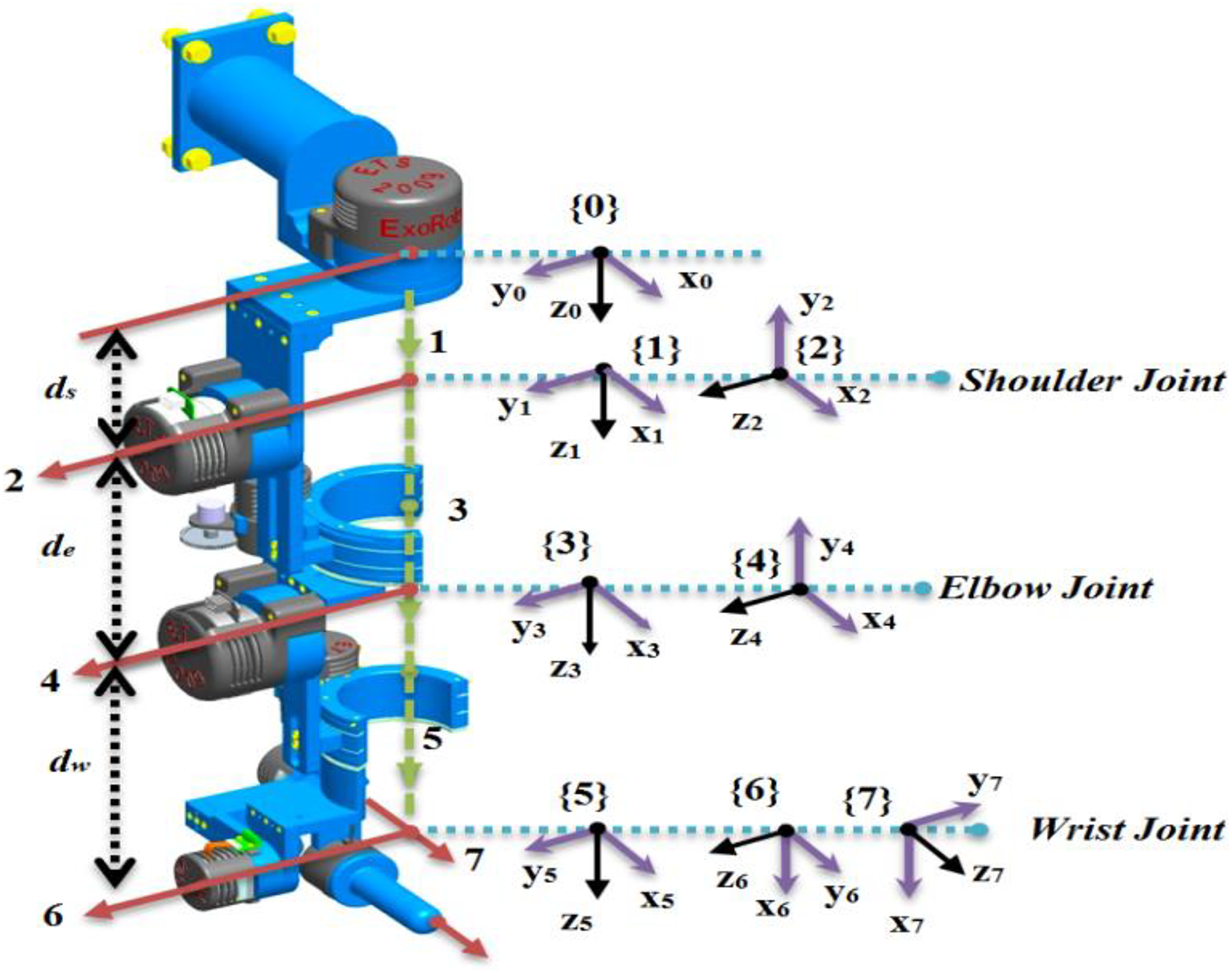
Reference frames of ETS-MARSE.
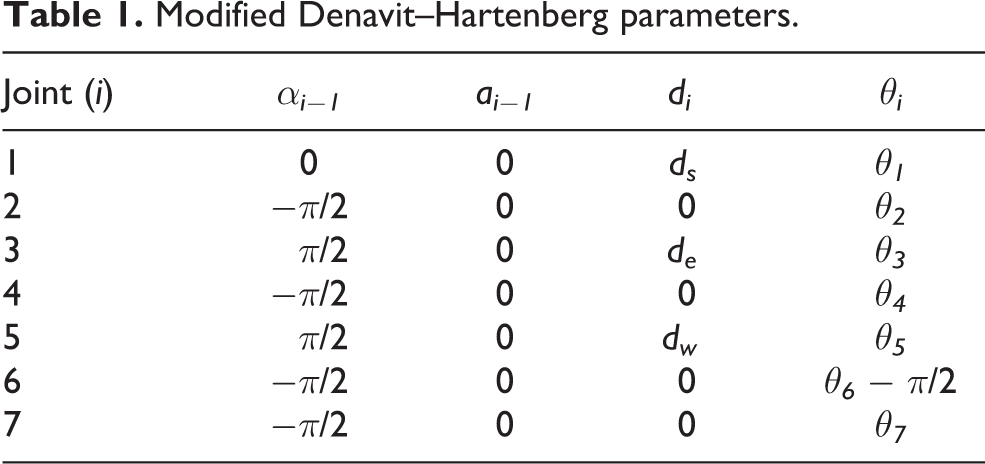
Table 1 presents the modified Denavit–Hartenberg (DH) of the exoskeleton robot. Figure 1 shows the reference frame attached to the robot which permits to acquire the mentioned (DH) parameters. 39 The workspace of the designed exoskeleton robot is summarized in Table 2.
Modified Denavit–Hartenberg parameters.
Workspace ETS-MARSE.

Human inverse kinematics solution
In most applications of assistive robots, the required trajectory is given in Cartesian space. The standard transformation from Cartesian space to joint space is done by a nonlinear function named Jacobian matrix. Due to the geometry of the robot, the inverse of a Jacobian matrix is not always available. In our case, the exoskeleton robot is redundant with 7 DOFs. The Jacobian pseudo-inverse solution widely used in robotics to solve this invertibility problem can be written as

where
The end-effector position is determined from the elbow pose and its joint angle amplitude, while the end-effector rotation is achieved by the last (wrist) joints. From known end-effector pose, the elbow joint (θ4) can be calculated geometrically and separately, as we see in Figure 2. Based on geometric relationships, we can determine the elbow position easily. This latter is defined by obtaining the distance (L) and the angle (α), which is situated between the link de
and the virtual axis that connects between the end-effector position and the shoulder position. While the elbow position is achieved, a unique analytic solution of three joints of the shoulder (θ1,

Representation of human motion in 3-D space and swivel angle (ϕ).
In particular situations, when the position of the wrist is positioned with specific restrictions, the redundancy of the manipulator can be parameterized by remarking that the elbow is yet free to swivel about an axis from the swivel angle (ϕ) to the shoulder. The axes of this circle are vertical to the vector guiding from the wrist joint to the shoulder. The swivel angle (ϕ) is the rotation angle of the elbow around a virtual axis that links wrist joint and the shoulder. The elbow pose draws the arc of a circle on a plane which is usually parallel to the shoulder-to-wrist axis during the swivel angle changes. It is important to clarify that the swivel angle is not a joint, it is not straight controllable, however, a measurable parameter outcome of the kinematics of the exoskeleton, based on the restrictions on the wrist rotation. Another significant point is that in primary physical therapy task, the swivel angle is equal to zero, without any impact on the inverse kinematics solution dilemma. A physical therapy motion does not include any restrictions on the wrist posture, and this fixation does not affect the redundancy of ETS-MARSE robot. The details can be found in the study by Brahmi et al. 35
Dynamics of ETS-MARSE robot
The dynamic model of ETS-MARSE robot in joint space

where

where
Let us introduce a new variable such that

with
Problem formulation
The problem is the accuracy/robustness dilemma of a compliant control or indirect force control. In this article, we focus on the implementation of a robust new controller that gives the exoskeleton system a high-level accuracy of trajectory tracking, and more flexibility and robustness to deal with the unknown nonlinear dynamics, unstructured modeling errors, and unknown bounded disturbances. It is important to mention that the controller is formulated and proved based on Lyapunov function using the following property and assumptions:
Property 1 39
The known part of the inertia matrix
Control design and its stability
The compliance control objective is to achieve force control via motion control (outer control loop). Therefore, the compliance force is to achieve the required position based on the external force or free trajectory. In such case, the required position is the sum of the current Cartesian position and a certain Cartesian displacement with respect to the gain matrix. This gain matrix consists of proportional gains. The second-order sliding mode control combined with TDE (inner control loop) objective is to achieve the accuracy/robustness performance of the exoskeleton system. The proposed scheme is illustrated in Figure 3 and corresponds to a compliance control strategy; a subcategory of indirect force control as illustrated in Figure 4. The desired trajectory in proposed compliance control can be given by the following relation

where

where
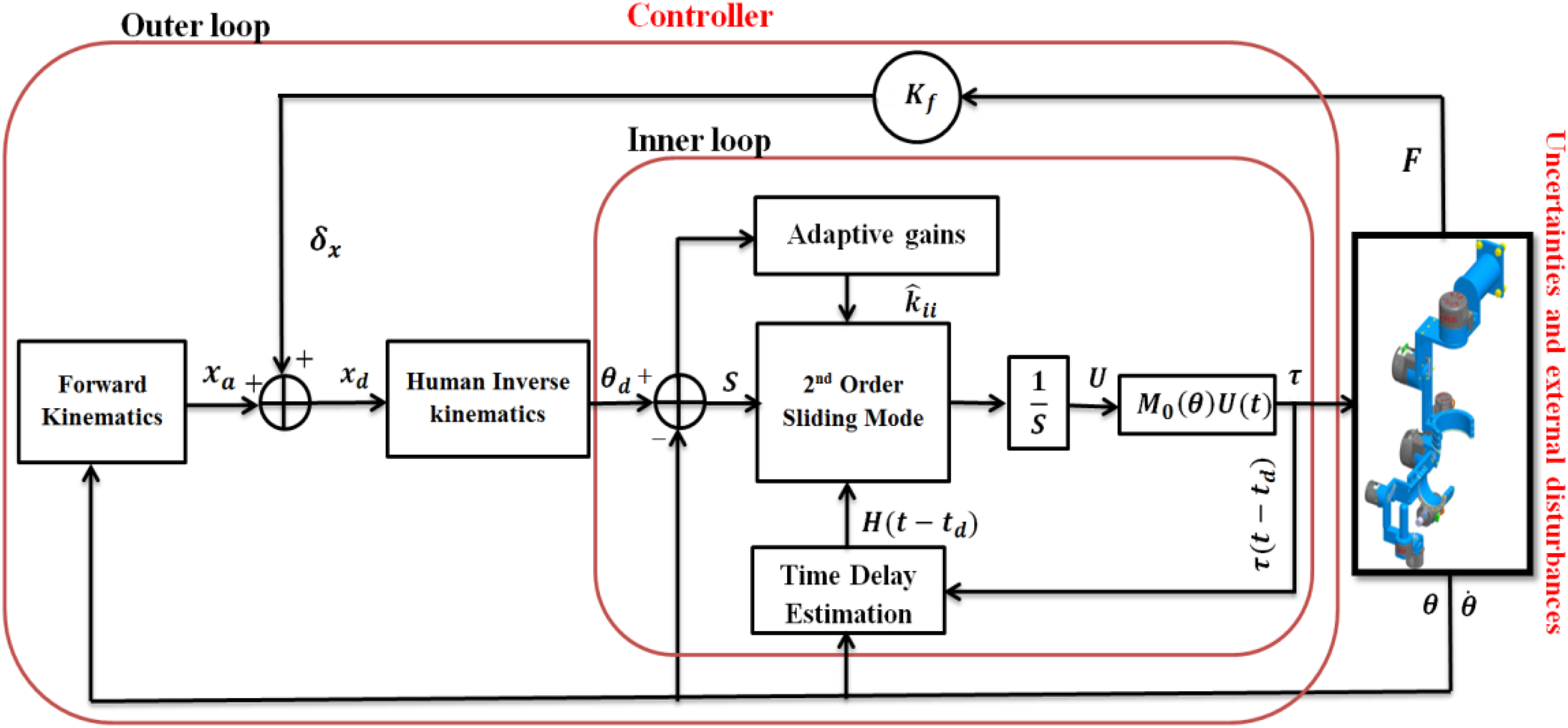
Diagram of the compliant control scheme.
Compliance control strategy.
For accurate force transmission, forces and moments expressed in the force sensor frame must be transformed into the robot’s base-frame reference using a well-known transformation matrix given by Craig. 39
Now let us develop the control tracking of the inner loop. The new approach proposed in this research combines an adaptive-gain second-order sliding mode control and TDE, applied on the dynamic model of the exoskeleton robot presented in equation (2). The sliding set of nth link to the surface or equivalent surface is determined by

Equation (7) shows an n-dimensional condition of the parameter system. In our case, it’s sufficient to differentiate the sliding surface once to obtain the desired control input. Let us choose the switching function or selected surface such that

where

In this research, we seek to reduce the chattering phenomena using second-order sliding mode to transform the discontinuous control to continuous signal using integral action. So, the second derivative of surface S is given by

The first and second derivative of S leads us to create a new system. Let us first insert two new variables

As we note, the time derivative of the control input
To complete the proposed controller procedure, let us introduce a new selected surface for the state-space expression presented by equation (11) such that

where

where

Taking the time derivative of equation (12), we find


From equations (13) and (15), we can conclude the time derivative of the control input such that

Since
where td is very small time-delay constant. Practically, the smallest constant that can be used in real time is the sampling-time period.
As we discussed above, the second-order sliding mode is qualified to attenuate the undesirable chattering. However, the double time derivative of the sliding surface can magnify the risk of the nonlinear uncertainties function that can cause instability of the system. Additionally, in a rehabilitation protocol, we deal with different subjects which mean different body characteristics. In this case, we still need large switching gains to preserve the stability and the robustness of the robot system, which again generates the chattering problem. In the article, a solution is proposed to avoid the chattering problem and to provide a smooth human-like motion. In this solution, we tuned the switching gain K adaptively, where the adaptive gains update law is given as follows

where the sub-indexes i and ii denote the ith element of a vector and the iith diagonal element of a diagonal matrix, respectively.
Finally,
Let us now define the time delay error such that

where
By substituting the estimated

The proposed joint torque law is described in theorem 1.
Theorem 1
Consider the exoskeleton system presented as the state-space equation (4), the proposed joint torque (equation (20)) ensures the stability of the adaptive gains of the second-order sliding mode with TDE if the following condition is verified

with

where
Proof
The proposed Lyapunov function candidate to show the stability of the robot is

where
Substituting

Using Young’s inequality such that

where
Since

The Lyapunov function
Integration on both sides of the equation (27) gives

Since

Therefore, V is bounded which implies that
Experimental and comparative study
Experiment setup
The robot system consists of three processing units, the first is a PC where the top-level commands are sent to the robot using LabVIEW [version 2018] interface namely, the control scheme selection, joint or Cartesian space trajectory, and so on. This PC also receives the data after the robot task is executed to analyze its performance. The other two processing units are part of a National Instruments PXI platform. Firstly, a NI-PXI 8081 controller card with an Intel Core Duo processor. In this card, the main operating system of the robot and the top-level control scheme are executed. In our case, the adaptive-gains second-order sliding mode-based controller as well as the estimation based on time delay approach had a sampling time of 500 µs. The human inverse kinematics algorithm is executed in a MATLAB script module of LabVIEW which can run inside this control loop easily. Finally, at input/output level, a NI PXI-7813 R remote input/output card with a field programmable gate array (FPGA) executes the low-level control, that is, a proportional–integral (PI) current control loop (sampling time of 50 µs) to maintain the current of the motors required by the main controller.
Note that the PI controller runs 10 times faster than the proposed control loop and is executed in the FPGA. Also, in this FPGA, the position feedback via Hall-sensors (joint position) and basic input/output tasks are executed. The force sensor feedback is important to accurately control the movement of the exoskeleton. A high linearity six-axis force sensor (NANO17-R-1.8-M2-M1PCI, ATI industrial Automation, Apex, NC, USA) is chosen to obtain accurate real-time force measurements. This sensor is mounted on the tip of the robot. The joints of the ETS-MARSE are powered by brushless direct current (DC) motors (Maxon EC-45 and Maxon EC-90) combined with harmonic drives (gear ratio 120:1 for motor-1 and motor-2, and gear ratio 100:1 for motors 3–7). Let us summarize the experiments setup by presenting the architecture for the ETS-MARSE system in Figure 5. The output of the controller is the joints torque commands. However, the torque commands are converted to motor currents and finally to reference voltage as the voltage value is the drive command for motor drivers. Furthermore, to realize the RT control of the ETS-MARSE and to ensure that the right control torque command is sent to the joints (as well as the reference voltage commands for the drivers), we also added a PI controller to minimize differences between desired and measured currents (i.e. the error command to PI controller).

Experiments platform.
The physical parameters of ETS-MARSE relative to the base reference frame are given in Table 3. The parameters of the proposed control are illustrated in Table 4.
Physical parameters of ETS-MARSE.

Controller parameters.

A VE (HELIOS) is created in open source “Unity 3-D” platform (see Figure 6). This interface consists of a set of functional movement tasks defined by a therapist. There are two types of communication with the ETS-MARSE system (LabVIEW). A user datagram protocol (UDP) protocol for transferring position data and a TCP/IP protocol for transferring the operator’s commands (e.g. star/stop the execution of the task). 37 The choice of these protocols is based on reliability and the speed of transmission of data for each one. Our platform is divided into two profiles: user profile and admin profile. The user profile is under the supervision of a therapist and a biomedical engineer. The latter is responsible for preparing the rehabilitation session (such as customized task, as per the patient’s need). The admin profile is responsible to manage the database of the patient (such as Add/Edit/Delete a patient) and he/she has access to the list of all patients and information concerning the rehabilitation session. 37
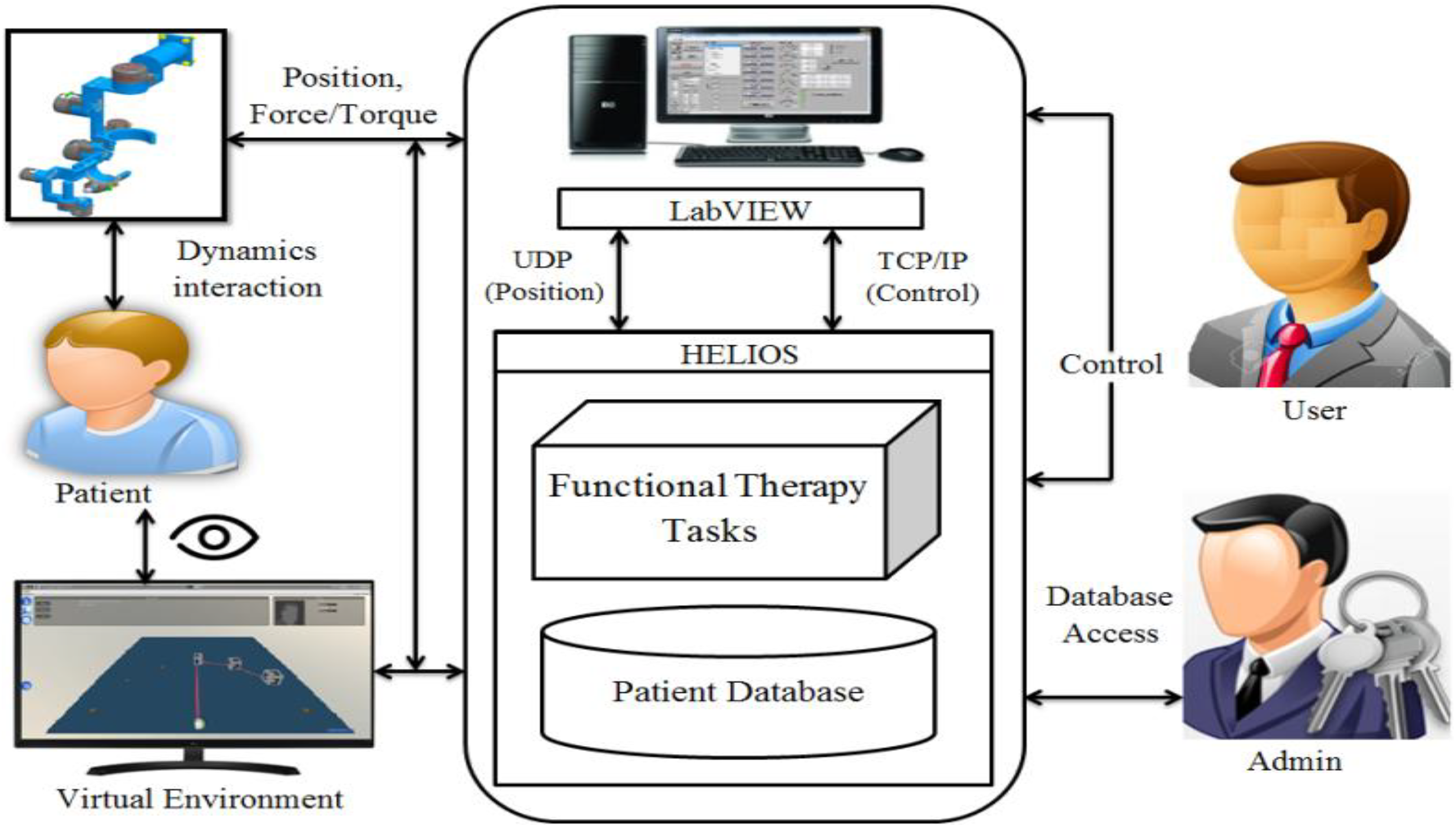
Virtual interface (HELIOS) diagram and its communication layout with ETS-MARSE robotic system.
Experiments’ results
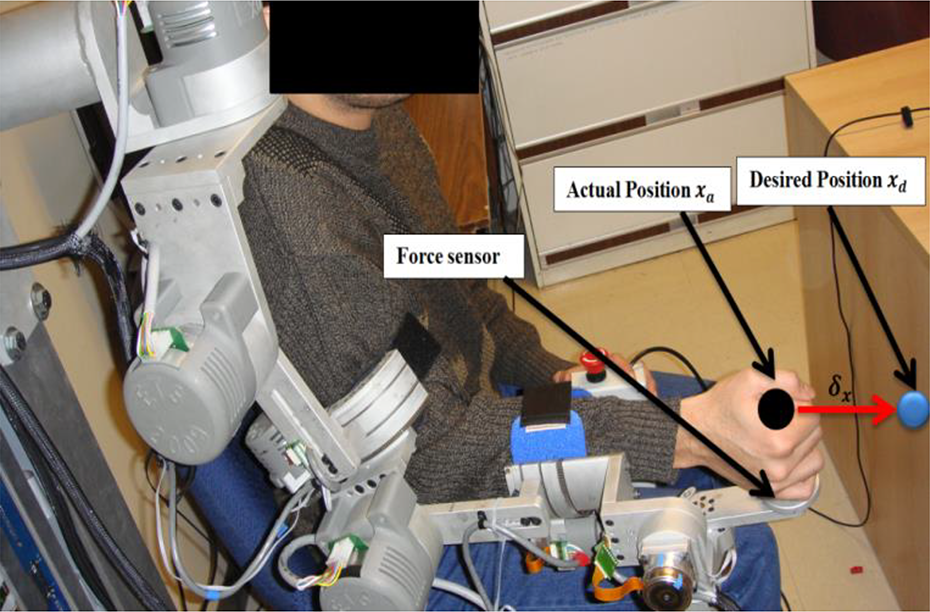
An experimental physiotherapy session was created to show the effectiveness of the proposed control system. The physical therapy tasks are performed by three different healthy subjects (mean age: 27 ± 4.6 years; mean height: 170 ± 8.75 cm; mean weight: 75 ± 18 kg). Each subject participated in a full physiotherapy session, under the supervision of a therapist and control engineer. The therapist defined the range of motion of each subject and attributed suitable exercise. Within the session, the subject was comfortably seated in a chair (with height adjustment depend to size to each subject) in front of the virtual interface as shown in Figure 7. Experimental physiotherapy session was devised to three scenarios. In the first scenario, subject 1 performed a designed task (forearm pronation/supination) for two repetitions using the proposed controller. The same subject repeated the same tasks using conventional second-order sliding mode control (constant switching gains) for two consecutive times. The objective of this experiment is to show the accuracy of the proposed controller compared with conventional second-order sliding mode controller. 29 In the second scenario, subject 2 has interacted with the VE trying to follow a proposed trajectory. In the third scenario, subject 3 performed a free motion during 2 min or more. It consisted of reaching an object or perform a daily activity such as eating, and the purpose of the last two experiments is to examine the transparency of the robot with each subject and how the control system permits the robot perform a smooth motion using human inverse kinematics. It is important to mention that each subject was repeatedly asked if he was sensing tired (bored) of the VE and the exoskeleton device and if for any cause intended to pause the trial session. Also, that all the experiments started from the initial position where elbow joint is at 90° and all the other joints at 0°.

The subject on front of virtual interface.
B1—Scenario 1
Discussion 1
Figure 8 presents the workspace of the performance tracking of ETS-MARSE performed by subject 1. It is clear that the proposed controller presents a good result where it keeps the stability of the robot system, small error not more than 2°, and smooth sliding surface. It is remarkable that the applied joint torque input is very smooth and the updated gains converge to a finite value as time going to infinity. Figure 9 presents the performance of the robot with the conventional approach. It is obvious that the conventional approach also gives good results, compared with the results (Figure 8) that is presented by the proposed control. The designed controller improves the performance of the second-order sliding mode control, where the error position, the sliding surface, and the control input that are provided by the proposed controller are relatively small and smooth than the results (Figure 9) provided by the conventional approach.

Workspace tracking of the robot performed a forearm pronation/supination by subject 1: (a) (age: 29 years; height: 178 cm; weight: 81 kg) using the proposed controller; and (b) Estimated gains.

Workspace tracking of the robot performed a forearm pronation/supination by subject 1: (age: 29 years; height: 178 cm; weight: 81 kg) using the conventional controller.
B2—Scenario 2
Discussion 2
Figure 10 presents the performance of subject 2 (age: 31 years; height: 183 cm; weight: 83.5 kg) in the virtual interface with the help of ETS-MARSE exoskeleton robot (red line is desired and the green line is the achieved trajectory). Figures 10(b), 11, and 12 present the workspace of error tracking of the robot in Cartesian space, the estimated gains, and the control input. It is clear from these plots (Figures 10 to 12) that the control strategy achieved the desired performance with small tracking errors and acceptable control input.

Workspace tracking of the robot using the proposed controller performed by subject 2: (a) (age: 31 years; height: 183 cm; weight: 83.5 kg; view on Unity platform); and (b) Cartesian errors.

Estimated gains.

Torques input of active rehabilitation task.
B3—Scenario 3
Discussion 3
Figures (13) to (16) present the performance of free motion by subject 3 (age: 27 years; height: 168 cm; weight: 70 kg) with the help of ETS-MARSE exoskeleton robot. Figures 13 (b), 14, 15, and 16 present the workspace of error tracking of the robot in Cartesian space, the workspace of the tracking trajectory in joint space, the torque input, and updated gains. It is easy to conclude, from these plots (Figures 13 to 16) two points. The first one is that the proposed control approach achieved the desired performance with high characteristics (small tracking errors and acceptable control input and convergence of estimated gains). The second one is the algorithm of human inverse kinematics. It provides a good solution and permits to transform the Cartesian task to the joints task by a unique and accurate solution.

Workspace tracking of the robot performed a free motion by subject 3: (age: 27 years; height: 168 cm; weight: 70 kg). (b) Cartesian errors.

Tracking trajectory of the robot in joint space corresponding to the free motion performed by subject 3: (age: 27 years; height: 168 cm; weight: 70 kg).

Forces and torques input of active rehabilitation.

Estimated gains.
Conclusion
In this article, we investigated active rehabilitation protocol by presenting a new compliant control based on second-order sliding mode with adaptive gains incorporating TDE. The control is based on human inverse kinematics to complete active rehabilitation protocols for an exoskeleton robot with unknown dynamics and unforeseen disturbances. The proposed control is principally aimed to deal with the accuracy/robustness problem of an admittance control. Second-order sliding mode has shown attractive characteristics of accuracy and attenuation of chattering. However, its problem is that the unknown dynamic of the exoskeleton robot and external disturbances can be amplified by the second derivative of sliding surface, which leads to instability of the robot system. Applying a large switching gain is needed to maintain the stability of the robot, which in turn makes the chattering problem existing yet again. Then, employing adaptive gains and TDE will improve the robustness of the second-order sliding mode control while overcoming its main limitation. The stability analysis is formulated and demonstrated based on Lyapunov function. An experimental physiotherapy session with healthy subjects using virtual reality was created to test the effectiveness and feasibility of the proposed control. In the light of these satisfactory results obtained with healthy subjects, we are looking forward to implementing the proposed control strategy with real unhealthy subjects as stroke victims in future work, which permits to evaluate the controller with true case of disturbances such as spasticity/dystonia and muscle weakness in neurological patients.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.