
Abstract
In order to reduce the influence of subjective factors on navigation risk assessment, we present a novel scheme based on the fuzzy Dempster–Shafer evidence theory in this article. At first, we deduce the fuzzy set after analyzing various indicators in actual vessel navigation as an example. What’s more, the current data can be adaptively transformed into quantitative information on the basis of two-order membership functions. Considering the inherent defects of standard Dempster–Shafer evidence framework, the assessment process is improved to combine the uncertain and conflicting evidences from available indicators to make reliable decision. Further, three propositions are derived to explain the proposed scheme step by step. Finally, the numerical study results indicate that the proposed scheme has satisfactory performance for vessel navigation risk assessment in the complex waters without any subjective factors.
Introduction
As a potentially dangerous navigation state, in effect, the navigation risk damages both nature environment and human life. In 2002, the International Maritime Organization (IMO) reported that the vessel navigation risk (VNR) is involved in the likelihood of occurrence and severity of consequence. 1 –3 With the vigorous development of modern transportation, there are plenty of traffic accidents in the complex waters, such as the port, bay, and reservoir. It is necessary to make accurate identification based on the promising assessment scheme. Given that the water traffic is a complex system determined by multifactor, it often involves the intelligent decision-making. Therefore, we should analyze the multi-information and carry out multilevel processing to mine the inherent information as much as possible.
The navigation risk assessment, as an important decision method, is getting more and more accepted to evaluate the risk level. In the past decades, many papers addressing this research topic have been published in some important journals. First, a fuzzy risk assessment in Akyildiz and Mentes 4 was incorporated in terms of a set of plausible model scenarios leading to traffic accidents. In view of different navigation conditions, the automatic identification system was implemented as the input for risk assessment under the convention on the international regulations guidelines. 5 In general, the maneuvers consist of complex dynamics owing to the external environmental conditions, such as the wind, wave, and water depth. In Perera, 6 a mathematical framework for predicting vessel maneuvers in a short interval was presented. In order to seek the different effects on navigation and conduct numerical weather routing system, the representative typhoon was analyzed to make a valuable simulation in Chen et al. 7 However, the complex structure of operations usually makes the occurrence of traffic accidents inevitable. For minimizing the negative impacts, a particular technique in Kececi and Arslan 8 was feasible to identify stakeholders responsible in implementing corrective actions. Of course, the situational risk awareness is also crucial for the intelligent decision-making. In Gauss and Rötting, 9 a navigational risk assessment system was further proposed. Proceeding from the risk-based approach, the aim of Lin and Fang 10 was to identify challenges for operators when preparing for various threats. In view of piloting factors, Hu et al. 11 proved a grey assessment model conform the result of subjective judgment with the fuzzy set. In order to enhance the maritime safety, the IMO presented the formal safety assessment method. Liu et al. 12 focused on this method on the vessel navigation, and then took the possible incidents into account. Nowadays, the analytic hierarchy process (AHP) is regarded as a popular assessment method that divides the completed water transportation system into many subsystems. Considering the uncertainty of factors and incompleteness of data, we can get navigation information by using the AHP method. With the comprehensive collection of maritime accident database, Li and Hao 13 made analysis on the safety risks by combining the AHP with fuzzy set. Hans et al. 14 selected the vessel integrated navigation system as an object, and then applied the AHP method to assess the security. In the AHP model, the weight of risk indicator is calculated by the discriminant matrix owing to the expert experience, where the information is obtained using the associated weights and the consistency test is executed on the basis of discriminant matrix. 15 In this way, the subjective factors play a leading role inevitably. In order to reduce the influence of expert experience in the AHP method, we should improve the assessment schemes and finalize credible results by mining the available information. As we know, the Dempster–Shafer (D-S) evidence theory is an appropriate approach to combine the multi-information. 16,17 With the dependent basic probabilistic assignment (BPA), the alternative technique for combining evidences was introduced in Blasch et al. 18 Subsequently, Zadeh showed that the use of normalization factor of D-S combination rule on highly conflicting evidence could lead to the counterintuitive results in some cases. 19 On the other hand, the fuzzy logic has its own advantage on the intelligent decision-making, whose solution can be cast in terms that are readily understood. Modeling with the incomplete data, the fuzzy logic gets the connotation through the representation of current information, which is a quantitative technique. 20,21 For this reason, Wang et al. 22 designed a vessel steering control method via the generalized ellipsoidal function-based fuzzy logic. Subject to both fully unknown dynamics and complex input nonlinearities of autonomous vehicle, a Nussbaum-based adaptive fuzzy algorithm was further proposed in the homogeneity-based finite-time control framework. 23
In this article, it is our intention to solve the diplex problems: How to assess the navigation risk without any interference from subjective factors? How to make a credible decision based on the proposed intelligent scheme? Therefore, we mainly analyze the VNR assessment by combining the fuzzy logic with improved D-S evidence theory, where the innovations of are outlined: (1) the fuzzy set of available indicators is built, and then the current data can be adaptively transformed into quantitative information; (2) the fuzzy assessment matrix is derived based on the enhanced membership function and the entropy of associated weight coefficient; (3) the optimal evidence combination rules are explored to deal with the uncertain and conflicting evidences from various indicators. The remainder of this note is organized as follows: In the “Theory analysis” section, the main navigation indicators are briefly discussed, and then the associated fuzzy sets are presented. In the “Innovative assessment scheme” section, the proposed scheme is discussed with the innovative propositions in detail. Subsequently, the numerical studies are presented with results to analyze the overall performance of proposed scheme in the “Numerical study and discussion” section. Finally, we come to the conclusion with the next research plan in the “Conclusion” section.
Theory analysis
In this section, we briefly analyze the indicators of vessel navigation, 24,25 and then present the associated fuzzy set.
Navigation indicator
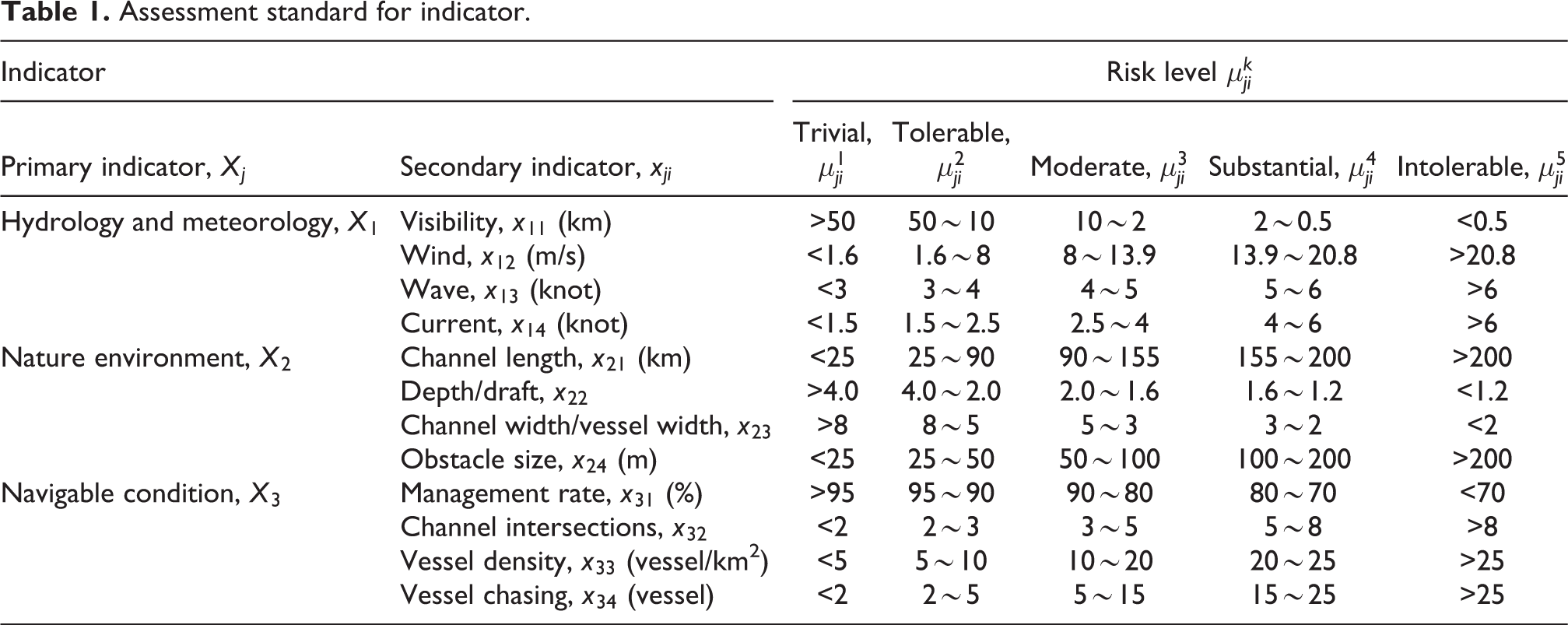
The primary indicators of water traffic includes three categories: the hydrological–meteorological indicator, natural environmental indicator, and navigable condition indicator.
Taking into account the enormously increasing probability of traffic accidents in bad weather, we consider the secondary indicators during the whole process, that is, the visibility, wind, wave, and current. It is generally known that the water traffic is affected by the poor visibility. Regarding the course and speed of vessels, the wind speed is an increasing probability function of water traffic accident, and the wave and current can cause vessel collision in channel. Therefore, we choose the visible distance of route as a standard to measure the visibility level. The wind speed, wave speed, and current speed are used as the levels of wind, wave, and current.
In view of natural environment, the vessel operator should comprehensively judge the water length, water depth, and obstacle width. The longer the channel length, the larger the probability of water traffic accident. With the increase of water resistance in the shallow region, the vessel power gradually decreases. Also, the narrow channel increases the probability of encounters. Inevitably, the obstacles are also the inherent harm. Then, we select the channel length, ratio of water depth to draft, ratio of channel width to vessel width, and obstacle size as the assessment standard.
Navigable condition includes the natural and artificial background, where the traffic management rate, channel crossing, vessel density, and chasing are the secondary indicators. Most of all, the navigable facilities are essential. The crossing channels increase the probability of vessel encounters, that is, the larger the number of vessels in unit waters, the greater the accident likelihood. Further, the chasing situation may cause collision. We use the navigable facilities to assess the management rate. The channel situation is measured with the channel intersections. As for vessels, their number in unit waters and chasing ratio are regarded as the assessment standard.
Fuzzy set of VNR
The IMO navigation rulemaking requires five risk levels
Assessment standard for indicator.
Innovative assessment scheme
This section derives the proposed assessment scheme by combing the fuzzy logic with enhanced D-S evidence theory.
Principle of proposed scheme
Due to the uncertain and insufficient information, the fuzzy set has no fixed representation. We suppose that the fuzzy set is based on the fuzzy comprehensive cluster, where the inputs are mapped by the membership functions, and the starting and ending points have large information content 26 –29

where the power κ is often taken to 1, 2, and 3. The fuzzy set has the simplest linear type under the condition of

Risk level and its fuzzy set.
For example, we only derive the risks based on x11 to define the membership functions. Further,




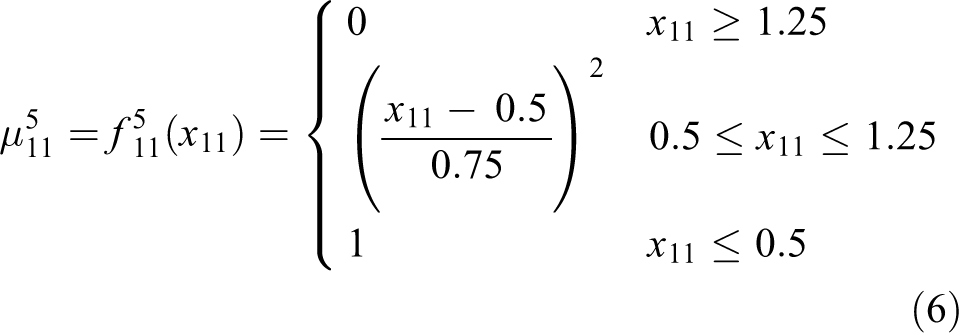
Membership function of secondary indicators.

For simplicity, the membership function
Membership function of visibility.

Proposition 1
Given that the membership function
Proof
The information entropy is defined as the averaged information content produced by a stochastic source. The information entropy fully takes into account the probability of achieving a specific indicator, so the information is about the underlying probability distribution. Given that rarer indicators provide more information, the information entropy should quantify the considerations when a probability distribution of the source information is unknown. We use

In the usual optimization, the method of Lagrange multiplier is a strategy for finding the local maxima or minima of a nonlinear function subject to equality constraints. Further, the Lagrange multiplier is a mathematical tool without the need to explicitly solve the conditions and utilize them to eliminate extra variables. Suppose that λ is the Lagrange multiplier, then the Lagrange function of
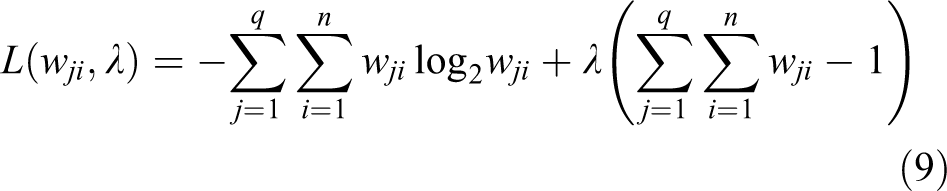
We define that

After solving the mentioned equations, we can obtain the optimal solution

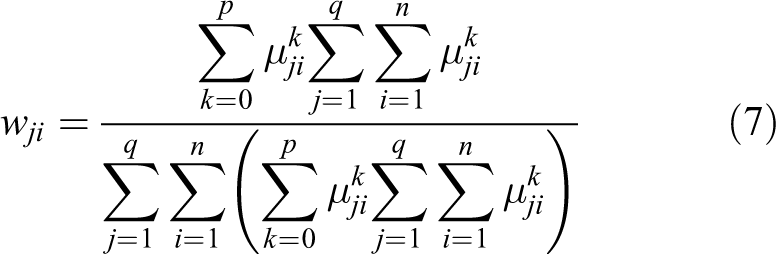
Note that

Let

Therefore, the normalized weight

Note that
After obtaining
As we know, the D-S evidence theory is a general reasoning framework. It is bounded by both belief and plausibility, where the belief in a hypothesis is constituted by the sum of masses in all sets. The plausibility equals 1 minus the sum of masses in all sets whose intersection with the hypothesis is empty. It is an upper bound on the possibility that the hypothesis is true.
30
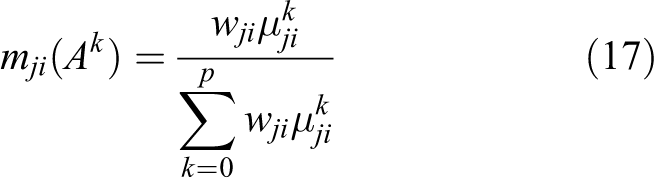
Then, we use the BPA in the space Θ to define the belief for one evidence on the probabilities for a related evidence. The BPA is updated when a new evidence is available based on the combination rule. Therefore, the BPA

Note that the normalized
Therefore, the BPA matrix M is given by
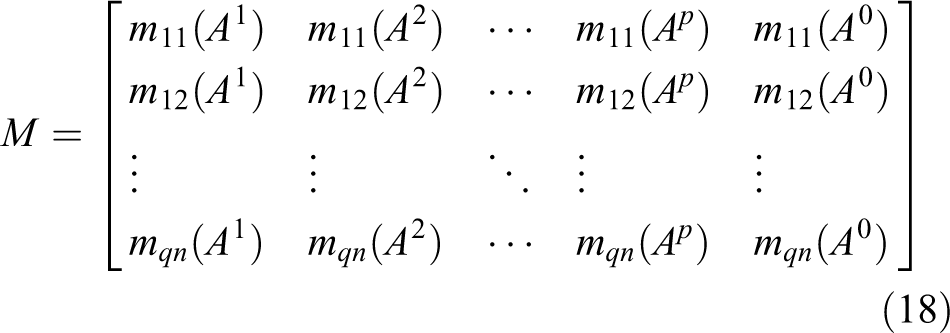
where each element in one line has been normalized. Suppose that

Note that
Proposition 2
Suppose that there exists the exceptional case

where the threshold of BPA is taken to ε > 0.
Proof
In equation (19), it is obvious that

Note that the threshold of BPA ε should be set assigned in the practical applications. After reassigning the related BPAs, the sum of elements in each line is equal to 1. We adaptively update 
The belief is usually converted to the Bayesian belief and turns assigning the BPA for sets. 34,35 If there are some conflicting evidences or the conclusion is not accord with the common sense, it cannot effectively combine the evidences

Therefore, we continue to adjust the BPAs of some elements in Θ for the uncertain situation

Proposition 3
Suppose that

where

Proof
In equation (24), the value of BPA should be the single element in Θ as well as A0 itself. Then,
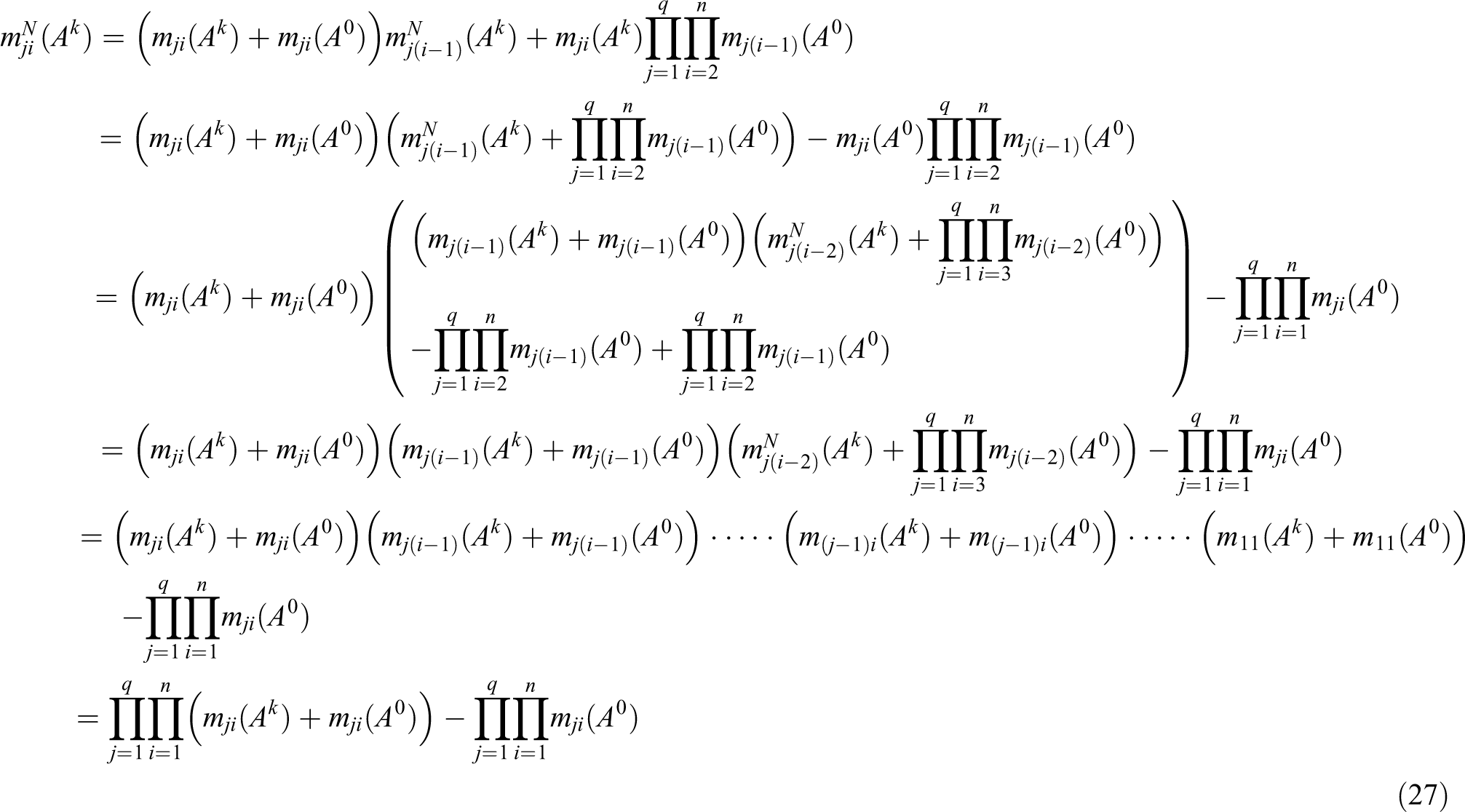
Note that the numerator in equation (19) can be presented by equation (27), which takes into account the uncertain situation given by equation (24). We compute the sum of 
Remark 1
Let
Implementation of proposed scheme
With respect to all the secondary indicators, Table 4 presents the pseudo-code of proposed scheme. In step 2, the membership function
Pseudo-code of proposed assessment scheme.

BPA: basic probabilistic assignment.
Numerical study and discussion
In this scenario, we make the numerical experiment to verify the assessment performance of proposed scheme. Given that the available secondary indicators have limitation and uncertainty, the proposed scheme is used to make intelligent decision. Our experimental environment was: IntelTM CoreTM i5, RAM 4 GB, MicrosoftTM WindowsTM 7, and MATLABTM V8.4. Twelve indicators refer to the visibility, wind, wave, current, channel length, ratio of depth to draft, ratio of channel width to vessel width, obstacle size, management rate, channel intersections, vessel density, and vessel chasing. Correspondingly, the related parameters are set as q = 3, n = 4, and p = 5.
Figure 2 demonstrates the main channel of Dalian, and Table 5 gives the detailed characteristics of this channel and a tested liner. We can compute that the ratio of depth to draft is 1.34 and the ratio of channel width to vessel width is 8.44. After getting all secondary indicators, we use equation (2) and Table 2 to get the membership function in Table 6.

Main channel of Dalian.
Related parameters.

Membership function.

Note that the information of the former five columns represents five levels of assessment risks, where x12, x14, and x32 are the components that mainly support the “moderate” risk, and x21 represents the risk level is “substantial”. Therefore, they are conflicting with other indicators. Further, the data of the last column denote the remainder risk (uncertain situation) that doesn’t belong to any level owing to the characteristics of required quadratic curve. As seen, some values in this column are unequal to 0, especially the value of x32 is maximal, which defines there is uncertainty among them. To a certain extent, the uncertain situation also causes
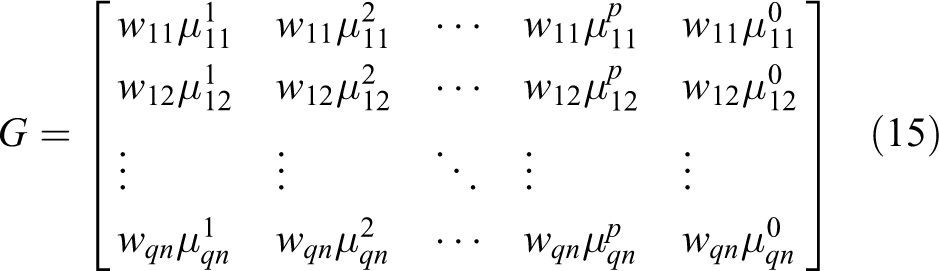
Regarding equation (15), we get the fuzzy assessment matrix G based on

Given that many 0s are in equation (30), there will be some BPAs in the matrix M by using equation (17). After setting the threshold

we can update the related BPAs based on equation (22). Therefore, the BPA matrix M becomes

With respect to equation (25), the combined BPAs are achieved based on the enhanced D-S evidence combination rule

Note that the largest
Comparison of averaged assessment accuracy.

D-S: Dempster–Shafer; AHP: analytic hierarchy process.
For the assessment efficiency, as a powerful criterion, the computational complexity is considered in depth. In Figure 3, we note that the larger the number of indicators χ, the higher the complexity O when the level of risks

Computational complexity under different χ.

Computational complexity under different
Finally, Figure 5 presents the averaged assessment accuracy of risk levels under various trails. Note that the proposed scheme has the largest accuracy for each risk level with the innovative rule. Although the neural network and AHP method have the modest decision, there is some expert experience in the AHP method. Unfortunately, the standard D-S method fails to combine the uncertain and conflicting evidences, and then achieves unstable result.
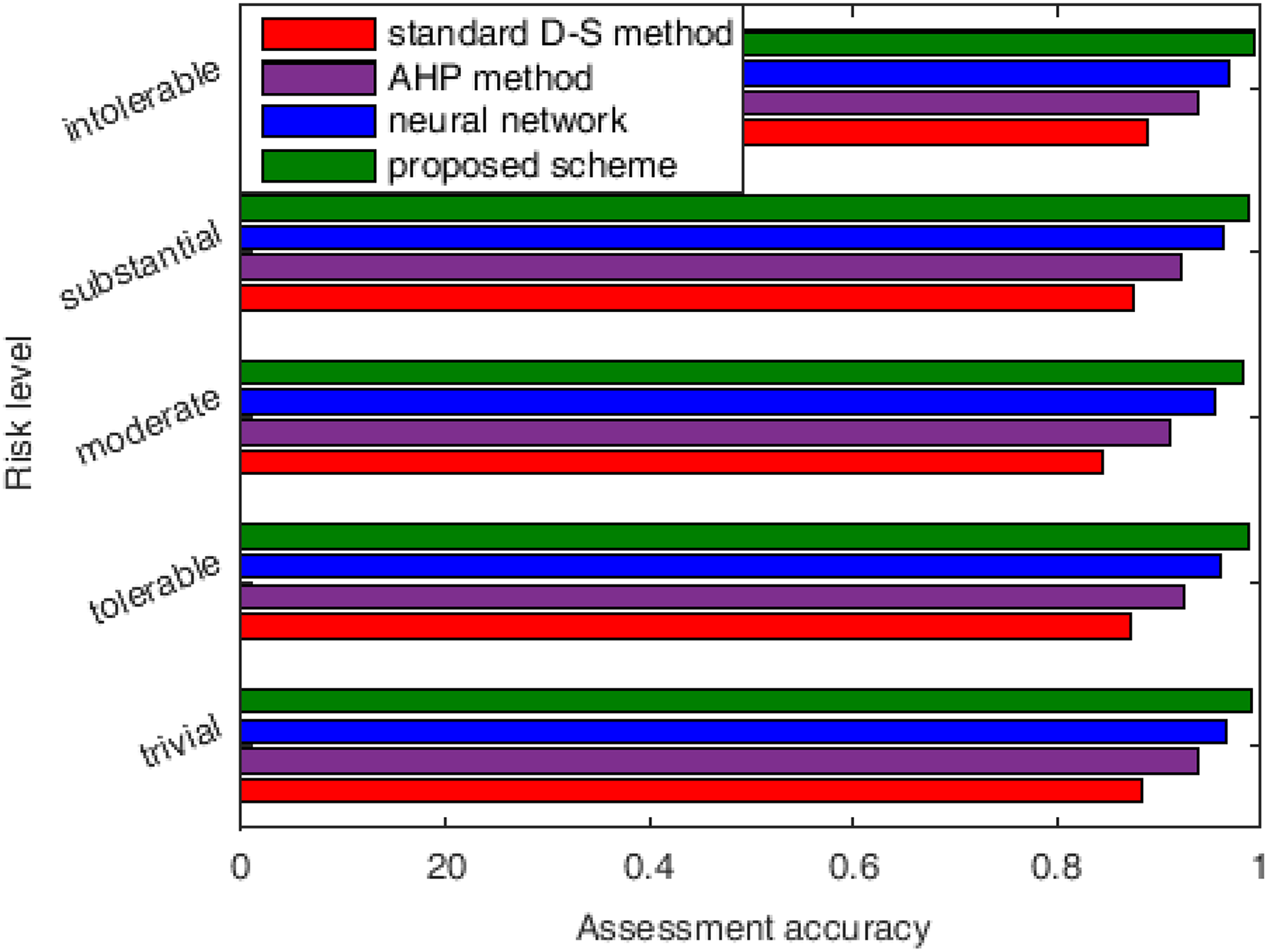
Averaged assessment accuracy.
Conclusion
This article develops an assessment scheme of VNR based on the fuzzy D-S evidence theory. We analyze the important indicators in the navigation engineering as an example. According to the fuzzy logic, the membership functions are derived to define five risk levels. In the enhanced D-S evidence framework, we further optimize the D-S evidence combination rule to deal with highly uncertain and conflicting evidences, which is more suitable to various applications. Finally, the numerical studies demonstrate that the intelligent decision can be achieved with the satisfactory performance for VNR assessment in the complex waters. As for the next research developments, we will further improve the assessment efficiency of the proposed scheme under the condition of insufficient indicators.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51679116), the Innovative Talents Support Plan of Universities in Liaoning Province (grant no. LR2017068), the Doctoral Scientific Research Foundation Guidance Project of Liaoning Province (grant no. 201601343), and the Program for Liaoning Innovative Research Team in University (grant no. LT2016006).