
Abstract
To stimulate the development of the Internet of Health Things and the construction of a robotic automation system in the healthcare industry, the mobile robot selection problem for a hospital pharmacy is studied. We target the mobile robot selection as a multi-criteria decision-making problem. The VIKOR-based implementation steps integrating fuzzy extended analytic hierarchy process technique are developed. To avoid any loss of information and ensure the veracity of the VIKOR-based calculations, we employ the fuzzy ranking technique based on the degree of possibility to select the best mobile robot alternative by deriving the minimum fuzzy comprehensive utility value. The results of a case study and the accompanying sensitivity analysis show the effectiveness and robustness of the fuzzy extended VIKOR approach for the mobile robot selection problem.
Introduction
Mobile robots, as an alternative to manual labour, are pervasive in manufacturing and logistics. To improve efficiency and the quality of service, more firms are using robots to assist humans on the routine and repetitive tasks. This has been helped by the growing investments in advanced manufacturing technology and robotic automation applied in a wide range of applications. Doing so has helped to improve organizational performance in a competitive environment and for developed countries where labour is scarce and expensive. The diffusion of robotics usage has come into the healthcare sector. 1 Due to the positive influence of industrialization and automation on the efficiency and productivity of the healthcare service, hospitals are showing interest in the robotic automation system (RAS) and Internet of Health Things (IoHT). Also, fuzzy technology has been embedded into intelligent materials flow processes to improve operational efficiency. 2 The RAS, by employing various general purpose robots, specialty robots, medical tracking vehicle systems (MTVS) and intelligent medical equipment, contributes to better service and higher efficiency. The application of IoHT and an intelligence-based management information system facilitates process flows in the hospital pharmacy for smarter service and saves time.
The maturity of information technology and intelligent systems has been the main stimulant for the prevalent use of robots in the healthcare sector. Robots are capable of performing difficult, repetitive and frequent activities with high accuracy. Industrial robots have been widely used for tasks such as materials handling, welding, painting, assembling and equipment loading. 3,4 There are many types of robotic equipment candidates for hospitals, such as the transporter robots for logistics, mechanical arms for surgery and robotics-controlled pharmacy. Further, mobile robots with a variety of capabilities, specifications and functions are programmed to keep to a consistent speed and performance, leading to operations efficiency and certainty. 5 A mobile robot is parameterized by several criteria: cost, quality, speed, flexibility and load capacity. This makes it difficult for decision makers to choose a mobile robot from the many available candidates for use in a pharmacy. 6 The decision makers need to identify and select the best robot to achieve the desired output with respect to the multiple conflicting criteria.
To solve the mobile robot selection (MRS) problem under such conditions, we call on the multi-criteria decision-making (MCDM) techniques. MCDM methods have been developed for and applied to many industries. For instance, Rao and Padmanabhan 7 proposed a robot selection index (RSI) using a diagraph of robotics selection attributes and the matrix-based method, to assist firms to evaluate and rank the robots. Braglia and Petroni 8 applied the data envelopment analysis (DEA) method to select industrial robots from a cost/benefit perspective, and their relative efficiency. The PROMETHEE-II method is applied to select industrial robots based on objective factors, and the rank order of all available robot candidates is derived by a decision support system. 4 Next, the extended PROMETHEE approach in a fuzzy environment is developed by considering quantitative and qualitative attributes, and the risk-bearing attitude of the decision makers is discussed by sensitivity analysis. 9 Chatterjee et al. 10 proposed two preferences dominance–based MCDM methods, namely the evaluation of mixed data (EVAMIX) and the extended preference ranking organization method for enrichment evaluation II (EXPROM2), to provide a priority ranking to select the best robot for a manufacturing application.
Robotics performance needs to be identified and evaluated through subjective and objective attributes. 6 Much of the literature addresses the performance of robots and highlights the objective factors, ignoring the uncertainty and vagueness of the subjective attributes of the MRS process. With qualitative attributes and subjectivity in the decision-making process, the uncertainty and vagueness of evaluation information and preferences need to be considered. 11 For this, the fuzzy-based techniques are integrated with MCDM methods. Rao et al. 12 developed a MCDM method to select robots, integrating the objective with subjective considerations of the criteria, and fuzzy logic is used to deal with the qualitative attributes. Karsak and Tolga 1 proposed a fuzzy suitability index by a fuzzy MCDM method considering the economic and strategic criteria, and the fuzzy-based techniques are used to deal with the vagueness of the qualitative criteria and the subjective preference ratings of the decision experts. Though fuzzy set theory is used in these fuzzy MCDM methods, using the defuzzification-based ranking method may lead to a loss of information. To offset this disadvantage, the fuzzy extended VIKOR-based MRS model is developed, integrating the fuzzy extended analytic hierarchy process (FEAHP) and fuzzy VIKOR techniques through triangular fuzzy numbers (TFNs); FEAHP is used to find the criteria weights, and fuzzy VIKOR is used to choose the best alternative. In addition, the fuzzy ranking method based on the degree of possibility of two TFNs is used to rank the mobile robot candidates, instead of the direct defuzzification method, to counter the issue of information loss.
The rest of this article is set as follows. Second section addresses the RAS in a hospital pharmacy, notably the mobile robot utilization in an intelligent pharmacy. The fuzzy extended VIKOR-based method is developed to solve the MRS problem in the third section. Subsequently, a case study is presented and conducted in the fourth section, and a sensitivity analysis is performed to verify the robustness of the proposed approach. The last section concludes the article.
Mobile robot in hospital industry
RAS in a hospital
The intelligent medical information system and robotic automation in hospitals have been a focus of the healthcare industry in the United States in the 1990s. Robotic apparatus and computer-aided decision support systems are prevalent in hospitals. The RAS is closely associated with specific procedures and tasks, and we need to identify which procedures can adopt a robotic apparatus to improve service efficiency. The involvement of RAS in the existing procedures of outpatient medical treatment is illustrated in Figure 1, as well as the involvement of the robotic apparatus and intelligent information systems. The general procedures of outpatient medical treatment include pre-diagnosis, registration and checks, diagnosis, medicine taking and treatment.
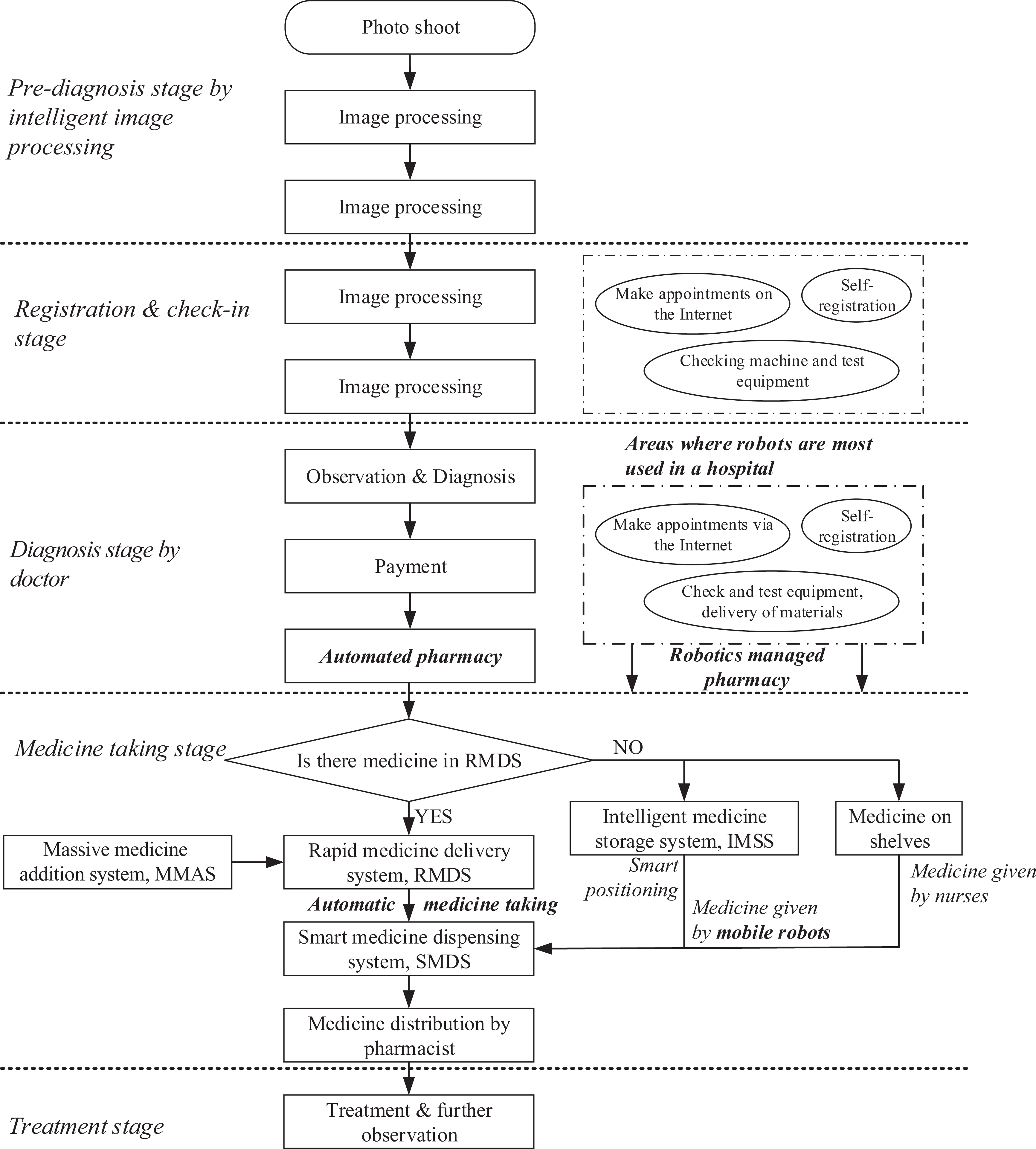
Medical procedures for patients and automation of activities in a hospital.
Mobile robots in a pharmacy
The RAS improves the efficiency and safety of pharmaceutical service by tracing the medical records, dynamic pharmaceutical inventory and drug allergy records. The intelligent management information system and automatic robots are capable to store data, which can indirectly support information statistics, clinical medicine warning and decision-making. More than half of the hospitals in developed countries use advanced information technology such as radio frequency identification, automated mobile robots and mechanical arms in the hospital pharmacy. The automated pharmacy optimizes administration, storage management and drug maintenance, as shown in Table 1.
State of usage of robotic automation subsystem in hospital pharmacies.

RAS: robotic automation system.
“•”: Object should be adopted for RAS of pharmacy.
“©”: Object can be adopted by pharmacy.
“◦”: No need to employ RAS.
From Table 1, automatic transportation using mobile robots and MTVS is mostly used to achieve hospital automation, which has been proven to be an effective investment. The TVS includes a system monitoring centre, mobile robot, transport track, send and receive site, track converter and storage station. The MRS is vital for establishing and developing an automatic transportation system in the pharmacy. Therefore, this study focuses on the MRS problem using a fuzzy MCDM method.
Fuzzy extended VIKOR-based MCDM method
The MRS problem is treated as a typical MCDM problem subject to multiple conflicting criteria C = (C1, C2,…, C
j
,…, C
n
). Suppose there are K experts from a robot-related area in the decision-making team D = (D1, D2, D
k
,…, D
K
), and there are m mobile robot candidates available A = (A1, A2,…, A
i
,…, A
m
). The fuzzy rating of robot candidate i subject to criterion j determined by decision maker k is
Criteria development
A mobile robot can help to fulfil the necessary transportation tasks, which assists the pharmacist to improve the efficiency of drug dispensing in a pharmacy. To choose a suitable mobile robot for the pharmacy, the influence criteria need to be identified and established first. Based on the MRS research, seven criteria are addressed by the decision-making team to appraise the mobile robot candidates, as shown in Table 2.
Criteria development of MRS.

B: benefit type criteria; C: cost type criteria; MRS: mobile robot selection.
Linguistic term and triangular fuzzy number
Fuzzy set theory, first introduced by Zadeh, 14 has been widely used in fuzzy MCDM problems involving many applications due to its ability to handle uncertainty and vagueness in problem-solving. 1,15 To quantify the preferences of the decision makers and the qualitative criteria, the linguistic terms and TFNs are used to reflect the linguistic variables investigated by the expert panel. The application of linguistic terms facilitates decision-making and distinguishes the qualitative information.
Linguistic term and TFN
The TFN is used to quantify uncertain judgements. Suppose


TFN and its membership function. TFN: triangular fuzzy number.
To reflect the uncertainty and vagueness of the judgement of the decision makers on the mobile robot candidates, a linguistic term is used to investigate the performance ratings of the alternatives subject to the influence criteria. In addition, the TFN is to quantify the subjective terms. We adopted a five-scale rating of the linguistic term. The linguistic terms and corresponding TFNs of the candidates’ performance ratings are shown in Table 3, and a similar rating-scale for comparing the criteria relative importance are found in Table 4.
Linguistic variables and corresponding TFNs for alternatives’ rating. 15

TFN: triangular fuzzy number.

TFN: triangular fuzzy number.
Evaluation information of mobile robot candidates investigated by expert panel.

AGV: automated guided vehicle; AIV: autonomous intelligent vehicle; VL: very low/poor; L: low/poor; VH: very high/good; H: high/good; M: moderate.
Pairwise comparison of criteria investigation by expert panel.

EI: equally important; MI: moderately more important; SMI: strongly more important; VMI: very strongly more important; EMI: extremely more important.
Fuzzy operations and defuzzification technique
The algebraic operations between the two TFNs are implemented by fuzzy operators.
6,15
Suppose

To derive the priority ranking of the mobile robot candidates, we compare the different fuzzy ratings of the objective alternatives. 18 As it is a TFN, the graded mean integration representation (GMIR) defuzzification technique 19 is employed to convert the TFN into a crisp value, as shown in equation (3)

Degree of possibility–based method for comparison of TFNs
The defuzzification technique is widely used to make comparisons between the two TFNs by converting the TFNs into crisp values. 15 However, the defuzzification may cause a loss of information, leading to unreliable comparison of the results between the TFNs. To avoid this situation, the degree of possibility–based comparison method between the two TFNs is employed. 20
Let


Illustration of intersection between the two TFNs (
Fuzzy AHP for criteria weight calculation
To select the best mobile robot by a VIKOR-based method, the criteria weight needs to be found a priori. There are many weighting techniques used to deal with fuzzy information in MCDM studies such as the AHP, DEA, analytic network process (ANP), anti-entropy-based approach and grey relation analysis. To deal with the uncertainty and vagueness of qualitative information, the FEAHP method by Chang has been widely used given its simplicity and minimal computational effort. 20 –23 After the fuzzy synthetic extent value (SEV) of the pairwise comparison is found, we can derive the relative weight of the criteria by normalization.
The implementation steps of FEAHP method are as follows:
Step 1: Form fuzzy pairwise matrix
The pairwise comparisons between every criteria pair are investigated and generated using fuzzy aggregation based on fuzzy five-rating scales. Suppose

Step 2: Fuzzy SEV calculation
Let

The value of


Step 3
Find the weight vector

Based on equation (8), we can obtain the weight vector of the criteria in equation (10)

After the normalization operation, the crisp priority weight vector of criteria is derived as
Form fuzzy extended VIKOR-based mobile robot ranking model
The fuzzy VIKOR-based MCDM method is employed to rank the available mobile robot candidates in terms of the multiple conflicting criteria. The fuzzy evaluation indices
An extended fuzzy VIKOR method is presented in this section as follows:
Step 1
Establish the decision-making member team D = (D1, D2, D k ,…, D K ), available mobile robot candidates A = (A1, A2,…, A i ,…, A m ) and influence criteria C = (C1, C2,…, C j ,…, C n ).
Step 2
Generate the fuzzy decision matrix of the alternatives’ ratings by fuzzy aggregation. Let the ratings of each candidate versus each criterion be

Step 3
Fuzzy decision matrix normalization

where
Step 4
Determine the best

Step 5
Compute the fuzzy distance

Step 6
Compute the maximum group utility

Step 7
The overall distance of the alternatives from the ideal solution

where
Step 8
Recommend the best mobile robot candidate by the fuzzy ranking method via the degree of possibility-based comparison on the fuzzy priority index
By comparing a pair of TFNs based on the definition of the degree of possibility, we obtain the best alternative with the minimum fuzzy comprehensive group utility value

The vector
Case study
A case is presented to validate the fuzzy extended VIKOR-based MRS model, and a comparison analysis is performed with the other MCDM methods, as well as the sensitivity analysis on the group utility value weight.
Background and mobile robot alternatives
There are three widely used industrial mobile robots for diverse applications, and the information of the three mobile robot candidates is listed as follows:
Ty-I (automated guided vehicle)
Ty-I is a large robot, (automated guided vehicle (AGV)), commonly found in the manufacturing industry, especially in the material handling process. It is excellent for high load capacities.
Ty-II (autonomous intelligent vehicle)
Ty-II is a mid-sized robot, (autonomous intelligent vehicle (AIV)). AIV has a smaller load capacity than AGV and is prevalent in the shop floor for its excellent performance on complex tasks.
Ty-III (3PO)
Ty-III is a small-sized robot, which has been adopted by some service industries. Compared to the above robots, the 3PO robot has high flexibility and good capability in human–machine interaction.
The evaluation performance of industrial robot candidates and the criteria comparison given by expert panels are listed in Table 5 and 6 respectively. The pharmacy needs to select the best mobile robot to assist the pharmacists in the pharmaceutical product delivery phase. The proposed fuzzy extended VIKOR method is used and applied in this case study.
Results
The proposed integrated fuzzy VIKOR-based MRS model is applied into the case study. The extended fuzzy AHP stages are applied to find the criteria weights, which are embedded in the fuzzy VIKOR procedure. After computing the fuzzy priority index (comprehensive group utility value
Ranking results of mobile robot candidates
Suppose the relative importance of the decision makers in the expert panel is the same, and the fuzzy pairwise comparison matrix is derived by fuzzy operators. Then, the calculation of the fuzzy SEV of each object criterion is found as presented in Table 7. From equations (9) and (10), based on the degree of possibility between the two TFNs, the criteria weight is obtained as shown in Table 7.
Criteria weight calculation based on FEAHP.

FEAHP: fuzzy extended analytic hierarchy process; TFN: triangular fuzzy number; SEV: synthetic extent value.
From the fuzzy VIKOR procedure, the ranking of the three mobile robot candidates is illustrated in Table 8.
Ranking of mobile robot candidates.
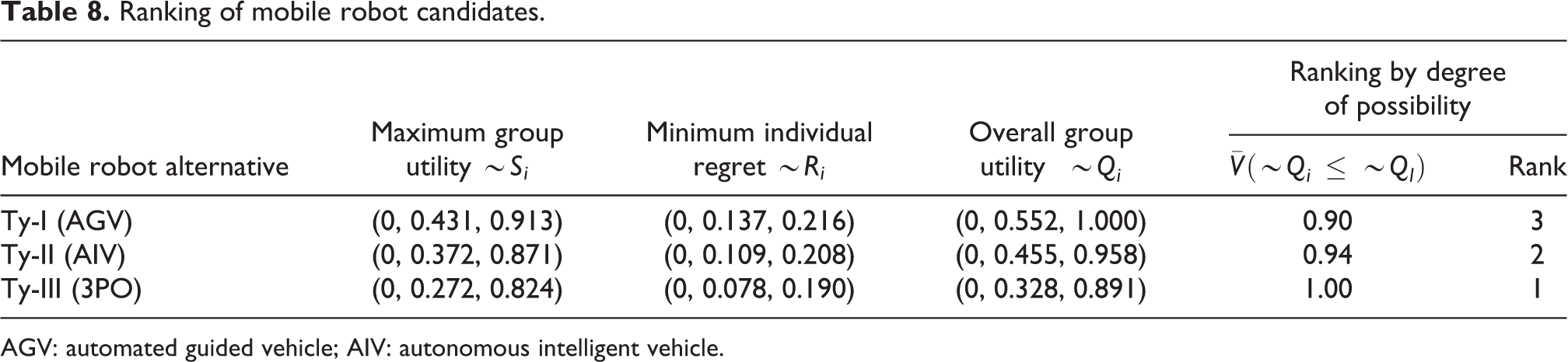
AGV: automated guided vehicle; AIV: autonomous intelligent vehicle.
Comparison with other methods
To verify the effectiveness of the fuzzy extended VIKOR approach, a comparison analysis with the fuzzy TOPSIS and defuzzification-based fuzzy VIKOR methods is conducted, 18 and the results are illustrated in Table 9. The GMIR defuzzification method is employed to convert the TFNs into crisp values, and we obtain the priorities of the mobile robots by the crisp evaluation index. 15
Ranking results comparison with fuzzy TOPSIS and defuzzification-based VIKOR.
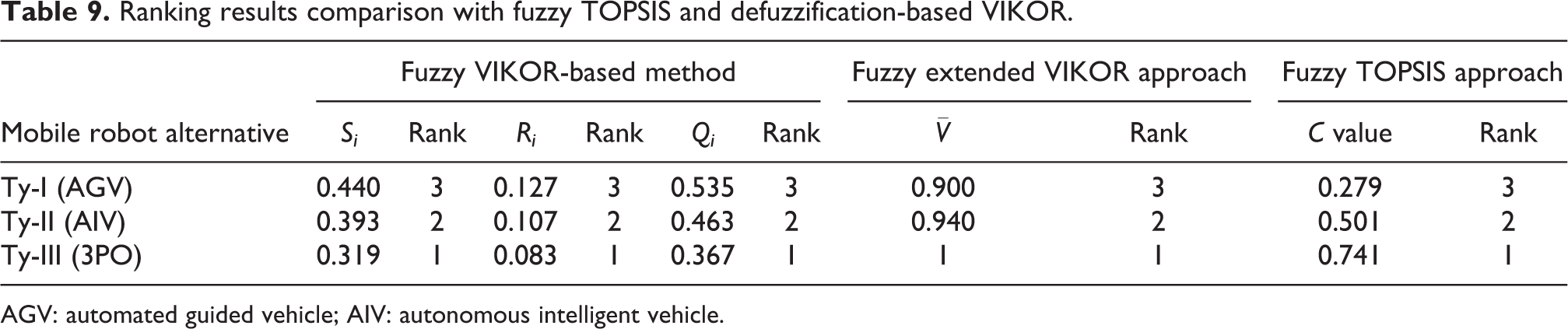
AGV: automated guided vehicle; AIV: autonomous intelligent vehicle.
The ranking order by the fuzzy extended VIKOR approach shows high conformance with the fuzzy TOPSIS and defuzzification-based VIKOR method (Table 9). All of the three MCDM methods and the priority index suggest that Ty-III (3PO) is the best mobile robot alternative for the pharmacy situation.
Sensitivity analysis
To verify the robustness of the fuzzy extended VIKOR approach, we conduct a sensitivity analysis on the group utility weight v, and investigate the rank order variation of the mobile robot alternative using several scenarios (S1,…, S11) as shown in Table 10.
Group utility value weight setting scenarios.

The parameter v reflects the optimistic degree of the preferences of the decision makers, and the decision results in the established scenarios are illustrated in Table 11. As shown, the best choice is still the Ty-III 3PO alternative when v varies, which points to the robustness of the proposed fuzzy extended VIKOR method.
Ranking results for scenarios S1–S11.
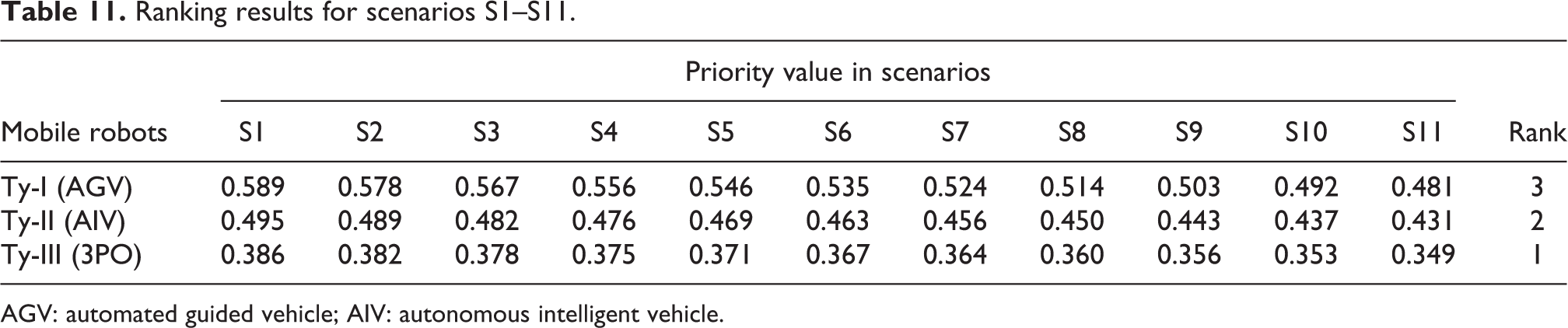
AGV: automated guided vehicle; AIV: autonomous intelligent vehicle.
Conclusion
There are many robots with different specifications, and choosing the best alternative with respect to multiple conflicting criteria can be complicated. This study addresses the MRS by targeting it as an MCDM problem for a hospital pharmacy. A fuzzy extended VIKOR method is developed by integrating fuzzy AHP and VIKOR-based techniques. To avoid any loss of information, a fuzzy ranking method based on the degree of possibility between the two TFNs is employed to prioritize the mobile robot alternatives. A practical case study shows the effectiveness and validity of the proposed approach. Some limitations exist. This article aims at an MRS study using the proposed fuzzy extended VIKOR method, and the evaluation performance of the robotic candidates are supposed to be fuzzy numbers. Thus, the general MCDM approach considering mixed evaluation information needs to be explored further and applied better to practice. As there will be interaction among the conflicting criteria, another fuzzy ranking approach considering the dependencies of the different attributes can be extended in the next study. In addition, due to the different functions of the robotic apparatus, the influence criteria on the specialty robots in the return transport and delivery stage differ from the established criteria of MRS. Therefore, a general robot selection model and intelligent decision support system can be developed as well, to improve the overall efficiency in the decision-making.
Footnotes
Acknowledgements
The authors thank the anonymous referees and the editor for their valuable comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the A*STAR National Robotics Programme, Robotics Enabling Capabilities and Technologies (RECT) (grant no. 1622500006) to MG.