
Abstract
In the course of the task, the mobile robot should find the shortest and most smooth obstacle-free path to move from the current point to the target point efficiently, which is namely the path planning problem of the mobile robot. After analyzing a large number of planning algorithms, it is found that the combination of traditional planning algorithm and heuristic programming algorithm based on artificial intelligence have outstanding performance. Considering that the basic rapidly exploring random tree algorithm is widely used for some of its advantages, meanwhile there are still defects such as poor real-time performance and rough planned path. So, in order to overcome these shortcomings, this article proposes target bias search strategy and a new metric function taking both distance and angle into account to improve the basic rapidly exploring random tree algorithm, and the neural network is used for curve post-processing to obtain a smooth path. Through simulating in complex environment and comparison with the basic rapidly exploring random tree algorithm, it shows good real-time performance and relatively shorter and smoother planned path, proving that the improved algorithm has good performance in handling path planning problem.
Introduction
With the increasing demand for automation in production and life, robotic intelligence is undoubtedly becoming the mainstream trend of robotic technology. Therefore, path planning of mobile robot, as one of the core contents of intelligent mobile robot, has been a hot issue in scientific research and production in recent years. 1 The so-called path planning is to plan a safe running route based on the perception of the environment and some specific algorithm and strive to complete the task efficiently. 2,3 Mobile robot path planning devotes to solve three major problems: (1) to drive robot from the initial point to the target point; (2) with specific algorithm to obtain a obstacle-free path and pass by some certain points to complete the corresponding task; and (3) in the completion of the tasks as previously mentioned, as far as possible to optimize the robot trajectory.
After decades of research and development, a great deal of research results has been obtained in the field of path planning ranging from the original traditional planning strategy to the artificial intelligence-based heuristic programming algorithm. 4,5 Traditional algorithms include sampling-based methods such as probabilistic road map and rapidly exploring random trees (RRTs), 6 –9 graph-based searching methods such as A* and D*, 10,11 and artificial potential field (APF) methods. 12,13 However, because of relying heavily on the environment model, requirements for accurate environmental information and being easy to fall into the local minimum, it is difficult to obtain the optimal path depending on the traditional methods only. Therefore, heuristic methods based on artificial intelligence have been proposed and become increasingly popular, such as genetic algorithm, 14,15 ant colony algorithm, 15 particle swarm algorithm, 16 as well as artificial neural network and fuzzy logic. 17 The neural network is prominent in path planning for its outstanding nonlinear mapping ability. The heuristic algorithm has strong ability to adapt to nondeterministic environments, thus overcoming the shortcomings of traditional algorithms. Of course, the shortcomings of neural network can’t be ignored. It always has higher requirements for hardware for its high computational cost, and sometimes is difficult to obtain the best parameters. However, with the upgrading of hardware computing capabilities and undemanding requirements of path planning, the disadvantages are fading gradually.
Among various path planning algorithms, the traditional planning algorithm with the heuristic one combined is a novel solution which draws on each other’s strength to obtain a composite algorithm with better performance. Oleiwi et al. has combined A* algorithm with genetic algorithm and fuzzy logic, proposing a composite path planning algorithm. It combines A* algorithm and genetic algorithm to search a global optimal path on the map at first and then takes the path as inputs of the fuzzy controller to adjust the speed of the mobile robot and generate a planned path in real time according to the moving obstacles in the environment. The new scheme of the path planning method has obtained outstanding performance in dynamic environments. 18 In Dongbin and Yi, 19 a composite method based on APF and ant colony algorithm was proposed that the APF algorithm determines the direction of the robot and the ant colony algorithm is used to find a local optimal path, which greatly enhances the probability to get the global optimal path. In Brendan and Hover, 20 the ant colony algorithm was introduced to the sampling-based method, and the new combination can obtain both the good real-time performance of sampling-based method and the shortest path based on ant colony algorithm. In Hao-Tien et al., 21 a new method, which is called path-guided APF with stochastic reachable sets is proposed. It found a barrier-free path in static environment at first using sampling-based method, and then the APF method is used to realize real-time dynamic obstacle avoidance, which have small amount of calculation and can realize flexible obstacle avoidance in complex environment.
Because of the fast search speed, nonnecessity of pretreating the state space and having the various constraints (dynamic constraints, kinematic constraints) of the robot taken into account, RRT can effectively cope with the path planning problem even under complex environment, which makes the algorithm being widely used and studied in the field of robotic motion planning in recent years. However, there are still shortcomings such as slow convergence, poor real-time performance, non-smooth path planning resulting from randomness of the algorithm, and so on. Therefore, this article proposes a combinatorial path planning algorithm based on improved RRT and neural network, which uses the target bias sampling strategy and a reasonable metric function to improve the basic RRT and then the curve post-processing is made to get smooth path. The superiority, validity, and practicability of the algorithm are verified by simulation experiments.
This article is organized as follows. It provides a brief introduction to the basic RRT algorithm and radial basis function (RBF) neural network which are necessary knowledge for further research in “Preliminaries” section. The method which is came up with to modify the basic RRT is described in “Methodology” section; specifically, the target bias sampling strategy and new metric function are provided in sections “Target bias sampling strategy” and “New metric function”, respectively; and the curve post-processing method is expanded in “Curve post-processing based on RBF” section. In “Simulation results and discussion” section, the simulation results with different algorithms in the same scenario and a comparison of proposed modified RRT with basic method are presented. Finally, the conclusions are given in the last section.
Preliminaries
To prepare for showing the proposed strategies of this article, the basic knowledge-related points are described in the following sections. The principles of the basic RRT algorithm and RBF neural network are discussed, respectively, in the sections “RRT algorithm” and “Neural network.”
RRT algorithm
RRT was first proposed by LaValle. 9 The basic construction process is shown in Figure 1. 22 Through a simple iteration, it tries to extend the RRT to a randomly selected new state q at each step. The principle of the EXTEND function is shown in Figure 2. First, a state q is randomly selected in the free state space, and then it tries to find the nearest vertex qnear from the random state free state q by traversing the whole RRT according to a specific metric (e.g. distance or angle).
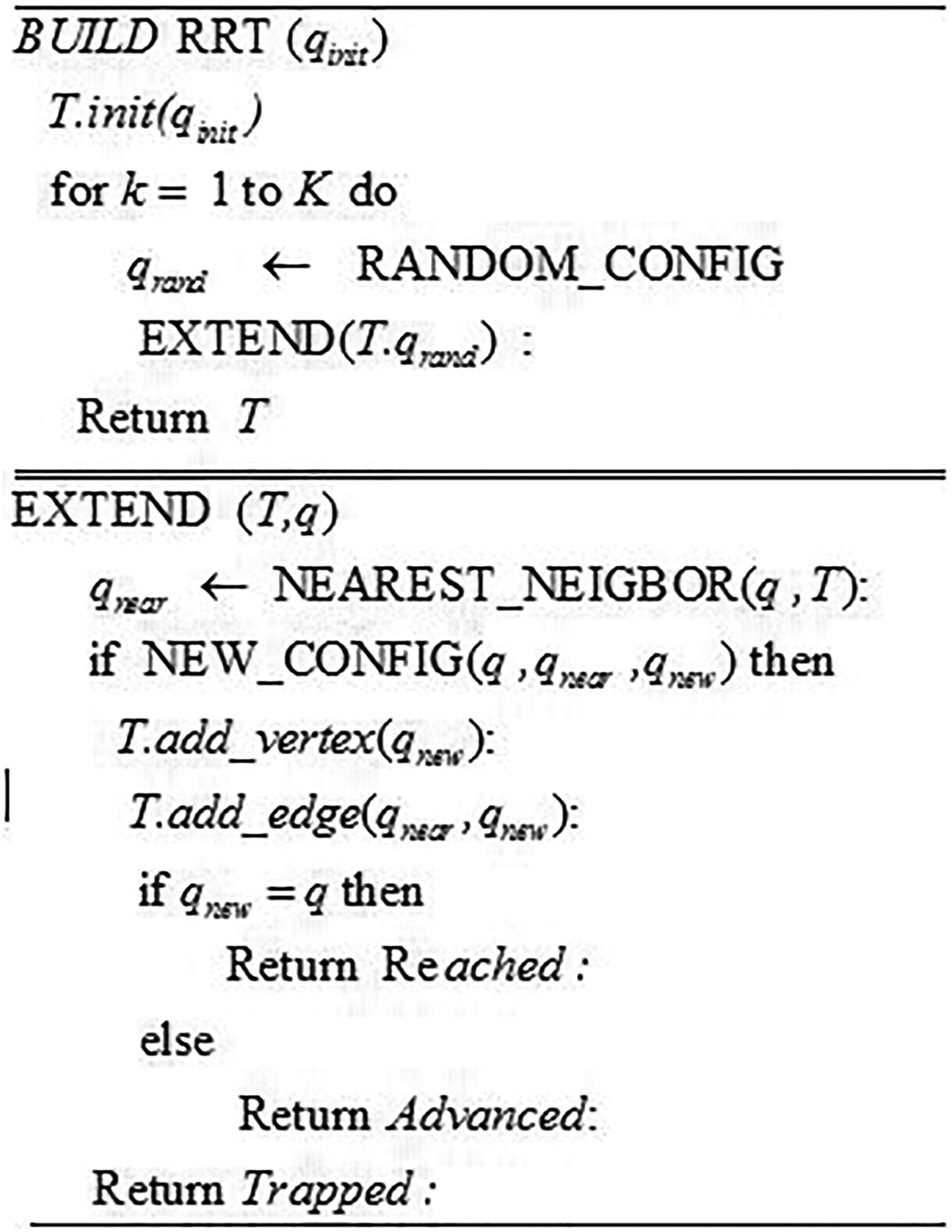
The basic RRT construction algorithm. RRT: rapidly exploring random tree.

The construction process of EXTEND.
The NEW_CONFIG function, acting on the random state q, drives the motion toward q by a fixed incremental distance ε. What’s more, the function uses a collision detection function to determine whether the new state (and all intermediate states) satisfies the global constraints; if NEW_CONFIG is successful, the new state is q.
There are three cases where the EXTEND function may occur: Reached: The new vertex arrives at random state q, and then q is added directly to RRT (for non-complete planning cases, there may be a threshold Advanced: The new vertex qnew ≠ q is added to RRT. Trapped: NEW_STATE function generates a new state that is not located inside Cfree.
In the path query phase, the RRT algorithm starts from the target state to find the parent node in turn until it reaches the initial state, namely, the root of the tree. Thus, a path satisfied the global constraint from the initial state to the target state is planned.
As mentioned earlier, the basic RRT algorithm has many drawbacks, so the improvement strategy of the basic algorithm has been put forward. In order to improve the efficiency of node expansion, Kuffner and LaValle first proposed RRT connect, 22 and then they proposed a bidirectional search tree (bidirectional RRT). Starting from both the initial point and the target point, then two RRTs are generated in parallel until the two trees meet and the convergence of the algorithm is accelerated. 23 Urmson and Simmons proposed a heuristic bias search algorithm that directs the RRT tree to grow toward the target area, allowing the RRT algorithm to obtain a low-cost solution. 24 Ferguson and Stentz consider running the RRT algorithm several times to gradually improve the quality of the solution, even if it can’t guarantee convergence to the global optimal solution; however, it ensures that each step of planned path is a relatively optimal. 25 As to RRT-based path planning, the metric function is very important but difficult to define precisely, so Cheng proposed to let the metric function continue to learn to reduce the sensitivity to the environment during the search process. 26 To overcome the non-smoothness of planned path caused by the randomness of the RRT algorithm, Fraichard and Scheuer proposed using clothoid curve for smoothing; however, the smooth path can’t be obtained accurately and in real time for loss of closed form solution. 27 Lau et al. adopted the five Bessel curves for smoothing but didn’t consider the continuity of the path curvature and the robot’s own constraints. 28 Elbanhawi and Simic proposed a simple and effective cubic B-spline smoothing algorithm that satisfies the nonholonomic restriction of the robot while maintaining the curvature of a continuous process. 29,30
Neural network
The RBF neural network is a typical forward neural network with three fixed layers, namely, input layer, hidden layer, and output layer. 31 –33 The structure is shown in Figure 3.
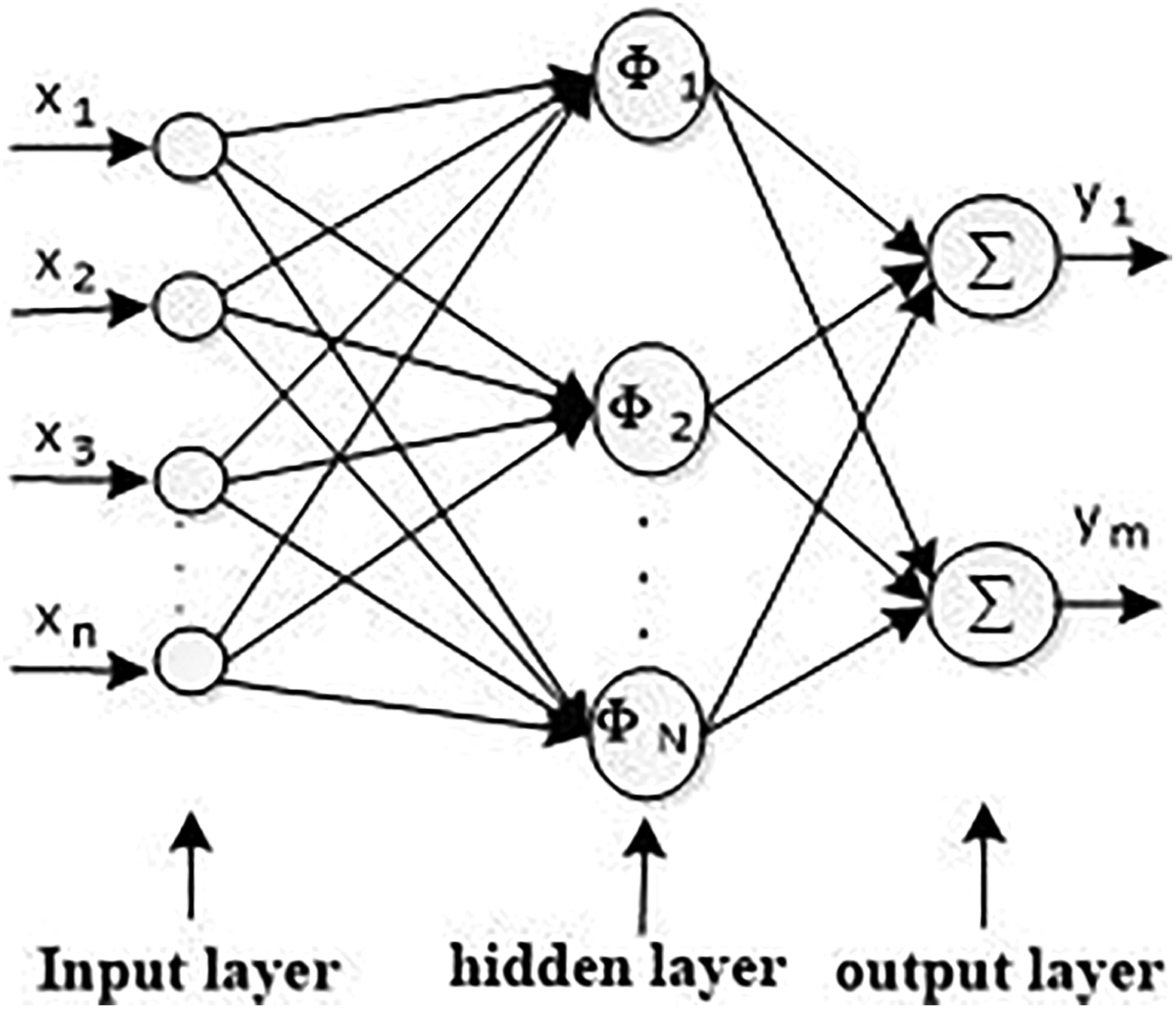
Model of RBFNN. RBFNN: radial basis function neural network.
The input of the activation function is defined as the distance ‖dist‖ between input vector x and weight vector ω, thus a hidden layer space can be obtained which is centrosymmetric in n-dimensional space. Distance between input vector and center point will directly affect the degree of activation, which determines that the RBF network is a local approximation network with fast rate of convergence. If n input samples are given, the output of the kth node of the hidden layer can be expressed as

where x is n-dimensional input vector; ci is the center which is the ith RBF of the hidden layer and it has the same dimension as x; bi is the parameter that determines the width of the ith RBF, commonly was named after extended parameter; and m is the number of hidden layer’s nodes. It is obvious that the RBF makes the network complete the direct nonlinear mapping from the input vector to the hidden layer space and the linear mapping from the hidden layer to the output layer. The output, which is the jth output node of the output layer, can be expressed as

where θj is generally equals to 0 and p is the number of output nodes.
The RBF neural network can approximate any continuous function with arbitrary precision, which is very suitable for nonlinear function fitting.
Methodology
As the core of this article, the proposed method is discussed detailed in this section. The target bias sampling strategy is stated in “Target bias sampling strategy” section, new metric function taking both the distance and angle into account is proposed in “New metric function” section, and the neural network-based cure post-processing is illustrated in “Curve post-processing based on RBF” section.
Target bias sampling strategy
According to the description of the basic RRT algorithm, it uses a uniform random searching strategy to search the whole state space. This method is easy to search for unknown space; however, it is also high computing cost and time-consuming because of sampling in large unnecessary areas, which greatly reduces the convergence rate of the algorithm so that it can’t meet the real-time demand of mobile robot motion planning.
In order to overcome this shortcoming, this article uses a target bias sampling strategy, that is, setting a target bias threshold pgoal in advance and then obtaining the probability value p according to the uniform probability distribution when random sampling is performed. If p > pgoal, qrand is generated according to the function RANDOM_STATE; otherwise qrand = qgoal. This approach not only keeps the randomness of the algorithm but also accelerates the rate of convergence to the target state effectively.
New metric function
The metric function is used in the RRT algorithm to find any tree node closest to the random sampling node. It determines the rationality of node selection and the efficiency of the algorithm, which is a major link in the practical application. In the basic RRT algorithm, the Euclidean distance is used as a metric function. However, in the practical application, the large amount of sudden rotation which is very detrimental to the stability of the robot and easy to damage the mechanical system is supposed to be avoided typically. Hence, the angle between the nodes should be considered to select a reasonable neighbor node, which affects the overall curvature of the planning path greatly.
For a more moderate turning, it should consider to make the path as smooth as possible rather than short while selecting new nodes. As shown in Figure 4, although the Euclidean distance between qm and qnew is shorter, since θ1 > θ2, qn is chosen as the nearest neighbor to get more gentle path.
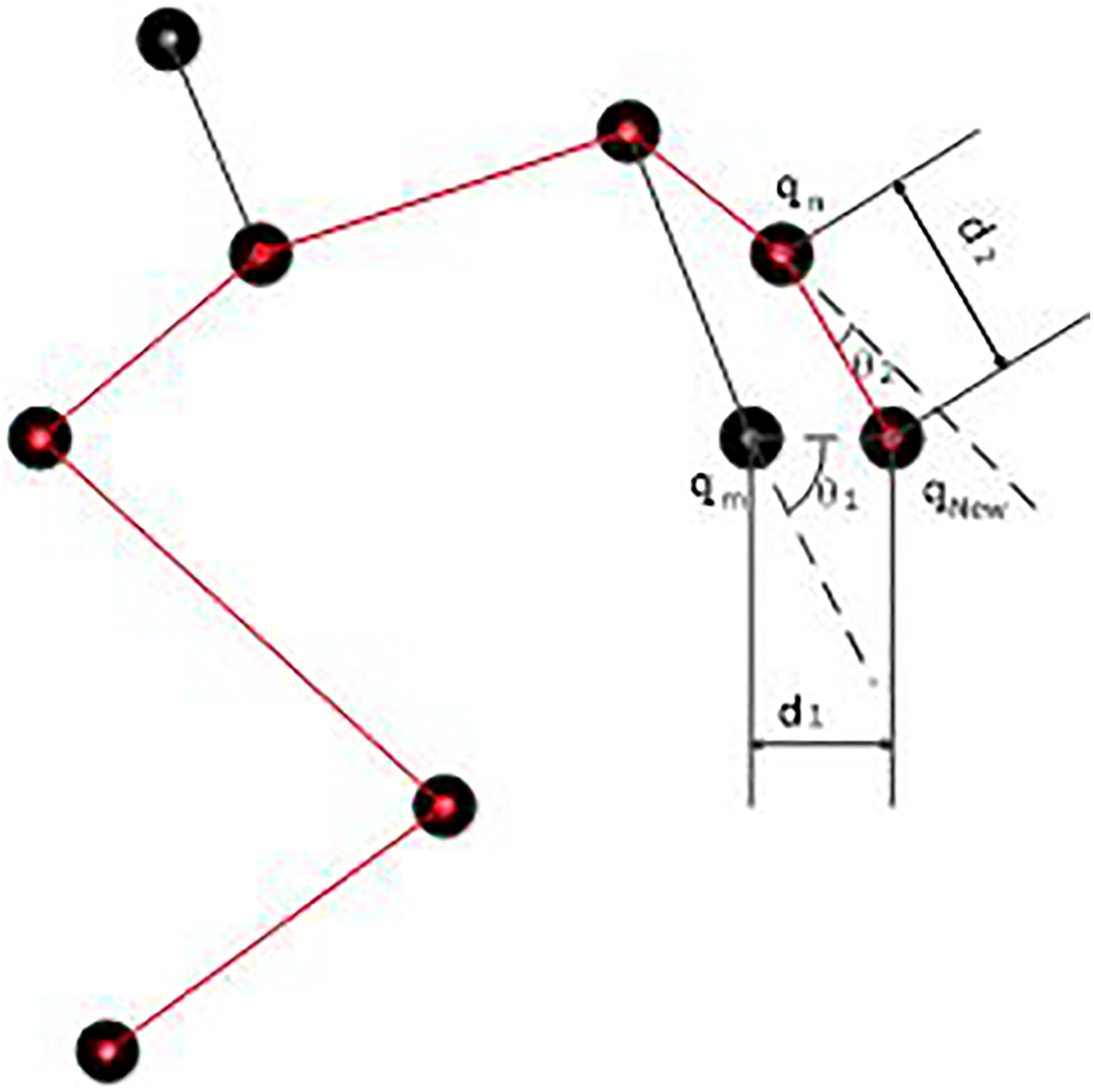
New metric function to select neighbor point.
Therefore, this article proposes a metric function C(qm, qn) which takes into account both the distance and the rotation angle
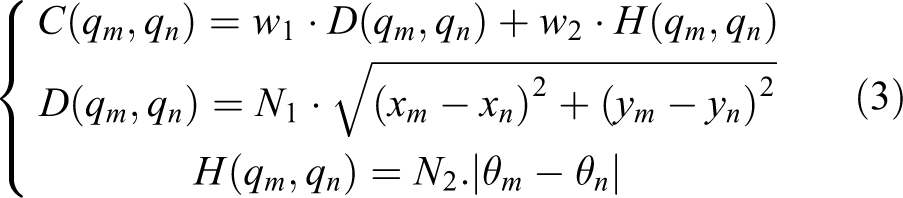
Since the distance and angle are two different kinds of dimensions, these two variables are normalized in order to take them into the same reference system. In this article, it uses a simple and effective deviation normalization method to normalize these two variables. In equation (3), D(qm, qn) is the Euclidean distance between the two nodes after normalization of the value, N1(d) is normalization function corresponding to the distance, H(qm, qn) represents the normalized angle value of the two nodes, and N1(θ) is the normalized function corresponding to the angle. The deviation normalization function is shown in equation (4). The parameters w1 and w2 are the corresponding weights, which can be adjusted according to the actual application

d max is the largest one between all distances; similarly, θ max is the largest one between all angles.
Curve post-processing based on RBF
Due to the random sampling characteristics of the RRT algorithm, the path planning is often unnatural and tremulous; what’s more, it usually contains many unwanted salient points. Especially in complex environments, obstacle constraints make it easy to generate more unnecessary break points, which bring difficulties for mobile robots to track in real time. Therefore, this article proposes an efficient post-processing method for the practical application of mobile robots in complex environment, so as to make the planned path as smooth as possible and improve the practicability of the planning algorithm.
First, obtaining the initial path planning through the improved RRT algorithm, it can get a series of path point set Q1 from the initial state to the target state, and then try to connect the posterior path point from the first path point, as long as there is no intersection between the path points and the obstacle space, then the path between them can be deleted and a straight line is used to connect the two points directly. If any collision occurs, the parent node of the collision point acts as a new starting point and the above operation repeats until the target state is reached. And then the path points obtained in the first stage of the post-processing will be stored in point set Q2. The schematic diagram of the preliminary post-processing strategy named “Redundant point elimination” is shown in Figure 5. The geometric figure represents the static obstacle, and the black thin line I s the path obtained by the preliminary planning step; the red dotted line indicates the interference with the obstacle and therefore can’t be directly connected to the path. After the preliminary post-processing of the path planning as shown by the red heavy line, it is clear that the path has been simplified.

The first step of curve post-processing.
Then, the point set
Curve post-processing based on RBFNN. RBFNN: radial basis function neural network.
Simulation results and discussion
To prove the effectiveness of the improved algorithm, it built a complex simulation environment based on MATLAB and simulated the algorithm. The black parts of the map show the static obstacles, and the area in blank represents the accessible areas. The task of the path planning is to find a path with the shortest path and maximum curvature in the feasible area through the modified-RRT algorithm proposed in this article.
For comparison, the simulation experiments are carried out under the current simulation environment based on the basic RRT algorithm firstly, and the simulation results are shown in Figure 7. The planned path is obtained as the red line shown in Figure 7, and yellow lines represent the random searching steps. Obviously, in order to get the path planning, the search process almost covers the whole map, and it also cost a lot of computing resources and time; hence, real-time performance is not good.

The path planning results of basic RRT.
The path planning obtained from the improved algorithm based on the target bias search strategy and the improved metric function is shown in Figure 8. Obviously, compared with Figure 7, it can be seen that the planned path based on the modified-RRT algorithm is not significantly better in length than the one based on the basic RRT algorithm. Contrary, it is obvious that the searching steps which are invalid on the map are greatly reduced, so that the calculation time can be greatly reduced as well and the real-time performance of the algorithm is guaranteed.

The raw path planning results of modified RRT.
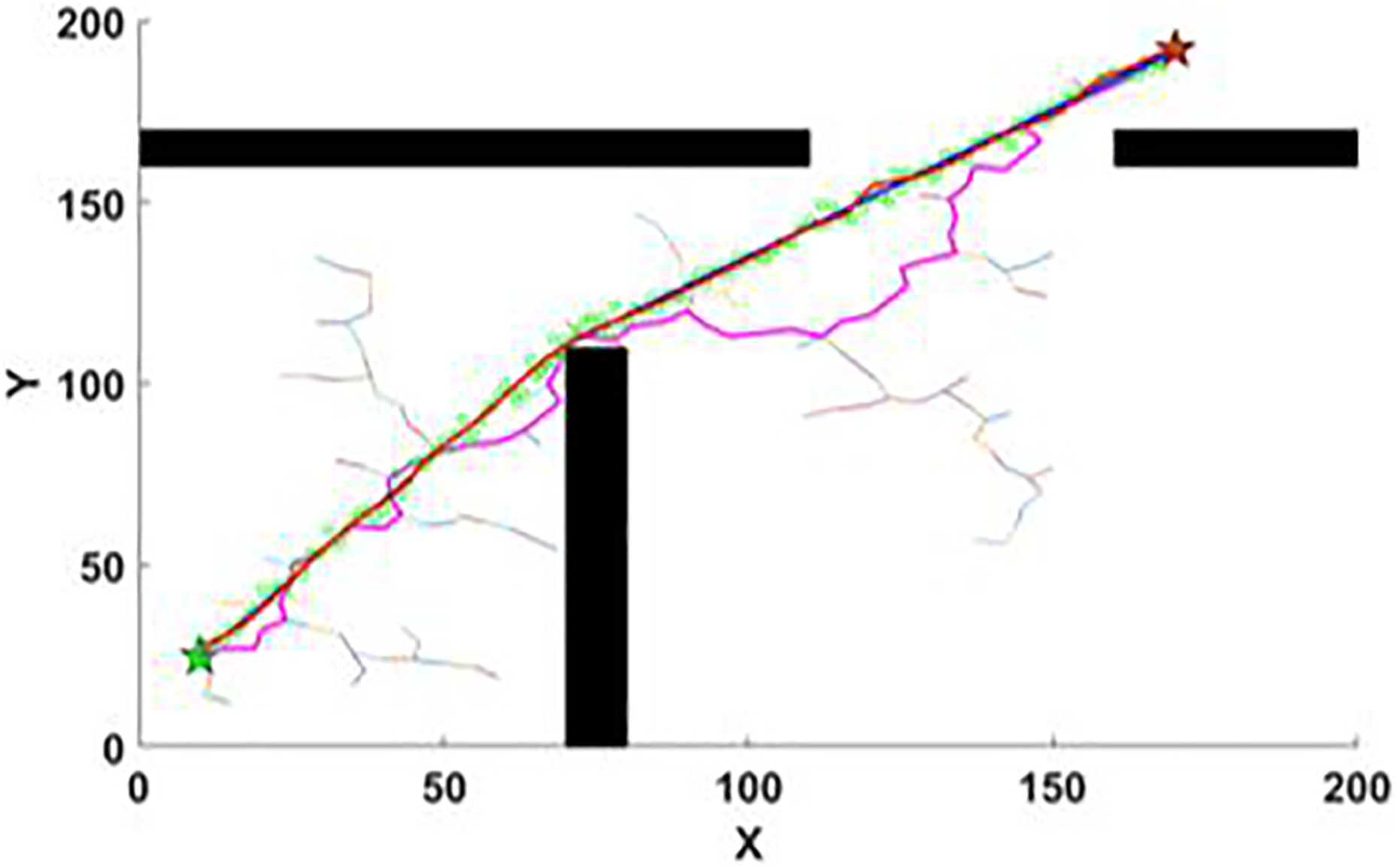
Due to the inherent defects of the random search, the initial path obtained from preliminary planning is still not the optimal path for that there are unnecessary winding and non-smooth features. Based on the “Redundant point elimination” strategy proposed in this article, we can get the path shown by black line in Figure 9, and it’s obvious that the total length of the path is greatly shortened. However, after initial post-processing, the unnecessary sharp angle is introduced at the local corner, which is very unfavorable in the practical application. In order to overcome the defects, the RBF neural network is used to approximate it, and the problem is solved effectively. As is shown in Figure 10 by blue line, the local sharp corners have been removed very well, namely, the continuous curvature of the path is obtained. What’s more, the whole path is smoother and the total path is shorter.

The first step of curve post-processing based on modified RRT.

The second step of curve post-processing based on modified RRT.
Considering the stochastic behavior of the RRT-based algorithm, it’s inappropriate to compare a single result of the basic RRT and the proposed algorithm, so the experiment is carried out 50 times in the same simulation environment and the average performance of the both is listed in Table 1. All simulations are carried out in an 800 m × 800 m workspace under Matalb2017a environment. The program-running platform is a 2.8 GHz Intel Quad-Core CPU i7-7700HQ with 8 GB of memory. The parameter p is set to 0.3 in the experiment.
Comparison of experimental results.

RRT: rapidly exploring random tree.
Conclusion
In this article, considering the defects of the basic RRT algorithm, several improved strategies were proposed, including the target bias strategy and a new metric function which takes both the distance and the angle into account at the same time, and then it put forward a post-processing method for smoothing the trajectory.
The target bias searching strategy can improve the searching efficiency and real-time performance of algorithm dramatically. The improvement of the metric function can improve the practicability of the algorithm, making the planned path as smooth as possible. And with the “redundant point elimination” strategy and neural network-based curve post-processing, it can make the path shorter and smoother. Especially, the curve post-processing based on RBF neural network can smooth the path as much as possible by obtaining continuous curvature without seriously devastating the real-time performance of the algorithm.
By building a complex environment map under MATLAB and carrying on simulation experiments, the results prove the effectiveness of the algorithm. Compared with the basic RRT, the proposed one in this article can sharply improve the real-time performance of the algorithm and can get relatively shorter and smoother path. However, in this article, the algorithm is only considered in the static environment, and the situation with dynamic obstacles deserves future study.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Key Project of Shaanxi Provincial Education Department under grant 16JS017 and Shaanxi Provincial Science and Technology Department Industrial Research Project under grant 2016GY-070.