
Abstract
This study presents a new adaptive synchronized computed torque control algorithm based on neural networks for three degree-of-freedom planar parallel manipulators. The basic idea of the proposed control algorithm is to use the incorporation of cross-coupling errors of active joints with the adaptive computed torque control algorithm, online self-tuned neural networks, and error compensators. The key to the success of the proposed approach is to improve the trajectory tracking accuracy of the parallel manipulator’s end-effector while driving the synchronization errors among active joints to zero. The uncertainties of the control system such as modeling errors, frictional terms, and external disturbances are adaptively compensated online during the trajectory tracking of the parallel manipulator. Using the Lyapunov theory, it is proved that the tracking errors and error rates of the overall system asymptotically converge to zero. To demonstrate the effectiveness of the proposed control algorithm, compared simulations are conducted using MATLAB/Simulink [version 2013a] combined with Solidworks 2014.
Keywords
Introduction
In the last recent decades, research on the control of parallel manipulators has had drawn a lot of interest in the robotics community. This is because parallel manipulators have potential advantages in terms of high rigidity, high speed, high accuracy, and high load-carrying capacity over serial robotic manipulators. They are widely used in numerous applications such as simulators, humanoid robots, medical robots, micro-robots, and high-accuracy pick-and-place positioning and are becoming increasingly popular in the strict requirements such as small product size and shorter assembly time.
In the literature on tracking control of parallel manipulators, numerous control methods have been proposed, which could be classified as two kinds of approaches. The first one is model-free control approach, such as proportional–derivative (PD) controller, 1,2 nonlinear PD controller, 3,4 and adaptive switching learning PD control method. 5 The other one is model-based control approach, such as computed torque controllers, 6 –10 the model-based iterative learning controller, 11 sliding mode controllers, 12 –16 and the adaptive controllers. 17 –21 The common characteristic of these approaches is that only local feedback information of the controlled joint is fed to the control loop of each individual actuator. Feedback signal from other actuated joints cannot be received. As a result, errors caused by disturbances in the control loop of one actuator are corrected by this loop only, while others do not respond. In parallel manipulators, the trajectory of the end-effector is led by all actuator motions. Therefore, all actuated joints in parallel manipulators should be synchronously controlled to increase the tracking accuracy.
Many works on synchronized control of parallel manipulators have been conducted in recent years. This control approach involves kinematic coupling among the active joints of the parallel manipulators, which results in higher tracking accuracy of the end-effector. The synchronized control approach was first proposed by Koren. 22 In his study, the cross-coupling control was used for a multi-axis machining tool to achieve the multi-axis tracking synchronization. It is the employment of the synchronization error that makes the synchronized control different from traditional proportional–integral–derivative control. This useful approach has become more popular in position synchronization control of multiple motion axes, 23,24 mobile robot control, 25,26 and tracking control of parallel manipulators. 27 –32
For tracking control of single parallel manipulators, Sun et al. 27 presented a cross-coupled control approach to the tracking control of parallel manipulators in a synchronous manner. On the other hand, Ren et al. 28 have proposed a convex synchronized control algorithm for a three degree-of-freedom (3-DOF) planar parallel manipulator. The control algorithm is based on the combination of the advantages of the convex combination method and the synchronized control method. In another approach, a synchronized control algorithm, which does not need dynamic model of parallel manipulators, has been presented such as integration of saturated proportional–integral synchronous control and PD feedback control algorithm. 29 In addition, Ren et al. 30 presented an adaptive synchronized control method for parallel manipulator based on the combination of synchronized control and adaptive control. Shang et al. 31 proposed an active joint-synchronization controller to solve control problem of redundantly actuated parallel manipulators. Ren et al., 32 in an experimental comparison study of the synchronized control approaches, have shown that the synchronized control methods based on a dynamic model of the robot can achieve better performance than the model-free ones. However, the model-based synchronized control algorithms are much more complex than the model-free ones due to the complexity of the dynamic model of parallel manipulators. In addition, the aforementioned methods are still complex and require numerous computation to be applied.
In this article, we propose a new synchronized control algorithm for 3-DOF planar parallel manipulators. The control algorithm is based on the combination of synchronization error and cross-coupling error with the computed torque control algorithm and uncertainties compensation method. The uncertainties of the control system such as modeling errors, frictional terms, and external disturbances are adaptively compensated by radial basis function neural networks (RBFNNs) and error compensators. The online weight tuning algorithms of the neural networks and error compensators are derived with the strict theoretical stability proof of the Lyapunov theorem.
The rest of this article is organized as follows. In the second section, the kinematic modeling and dynamic modeling of 3-DOF planar parallel manipulators are formulated in the active joint space. The proposed synchronized computed torque controller (SCTC) is presented in the third section. The comparative simulations are carried out in fourth section in order to verify the effectiveness of the proposed controller. Finally, a conclusion is reached in the fifth section.
Kinematic modeling and dynamic modeling of 3-DOF planar parallel manipulators
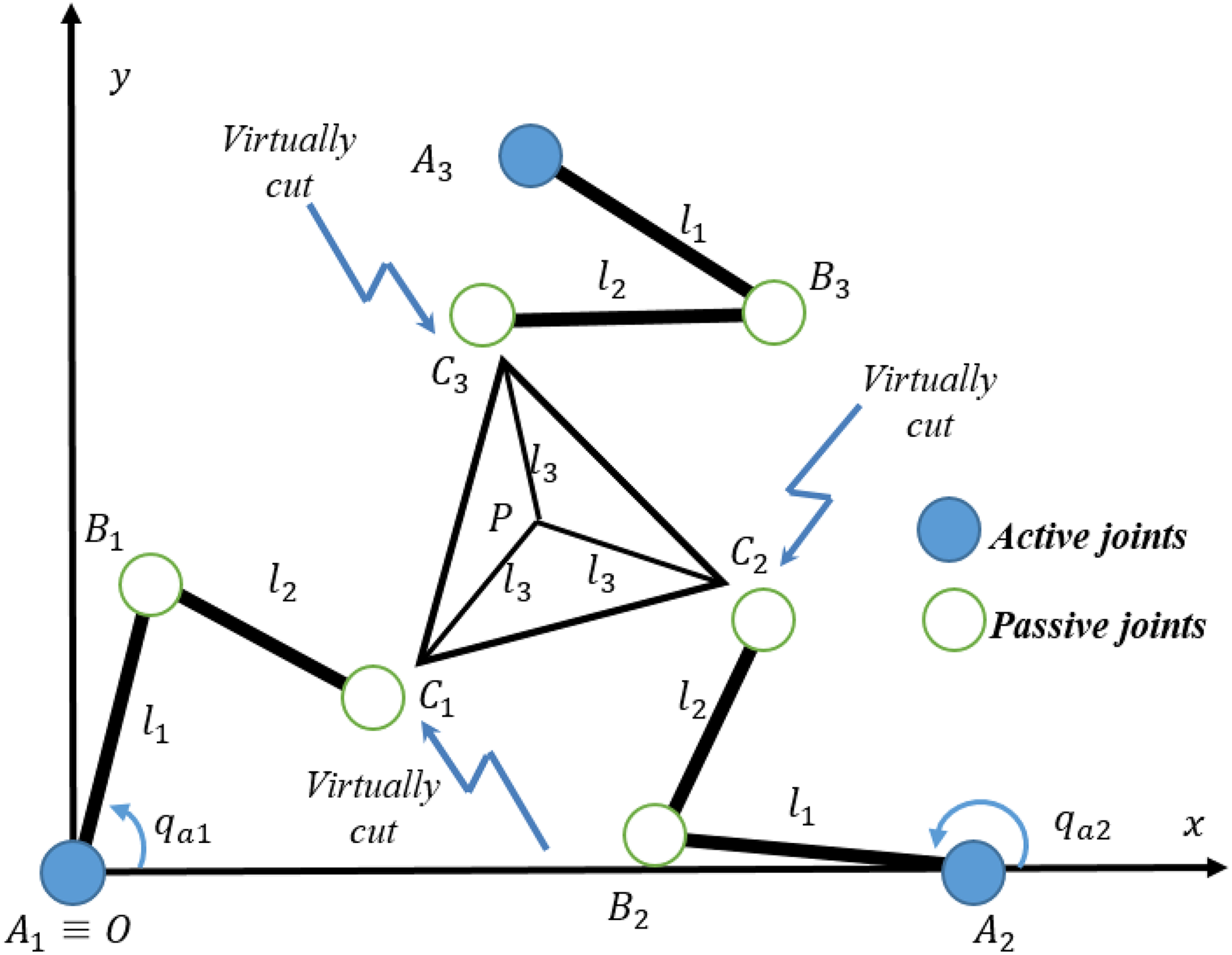
The 3-DOF planar parallel robot manipulator is shown in Figure 1. It works on a horizontal plane and in a reference frame Oxy. The manipulator consists of three active joints and six passive joints. The active joints are actuated by actuators, while the passive ones can move freely. The end-effector of the robot is a triangle C 1 C 2 C 3, which connects the ending points of three 2-DOF serial robot manipulators. P is the center point of the end-effector. The 3-DOF planar parallel robot manipulator is controlled by actuating three active joints A 1, A 2, and A 3.

Three-DOF planar parallel manipulator. DOF: degree of freedom.
We denote the vectors of variable as follows
In the control system, for the 3-DOF planar parallel robot manipulator, the control signal will be sent to drive three active joints of the robot. Therefore, we need to develop kinematic model and dynamic model in active joint space.
Kinematic modeling
Forward kinematics
In the forward kinematics problem, we compute the end-effector’s coordinate
From Figure 1, we have the following equation system
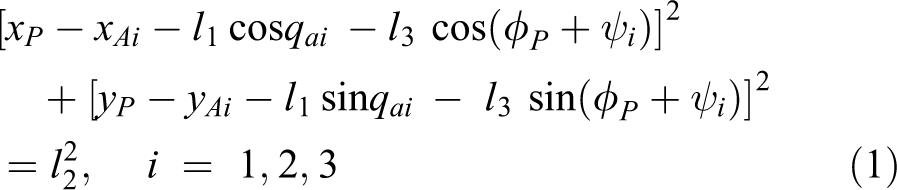
in which ψi (i = 1,2,3) are, respectively, equal to 7π/6, 11π/6, and π/2.
Solving the equation system (1) by applying the numerical method, we obtain coordination xP
, yP
, and the value of ϕP
with given input
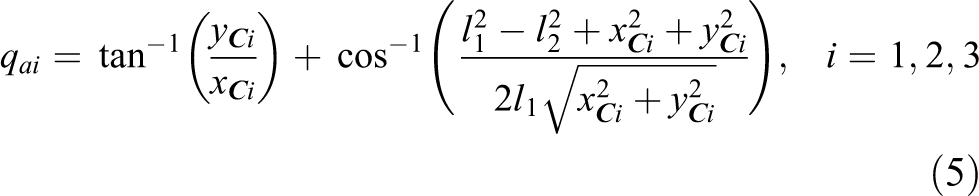
In the control system, we need to know the value of passive joint angles. After having the output

where the coordinates of the points Ci (i = 1, 2, 3) are computed as follows


Inverse kinematics
The inverse kinematics problem is to obtain the active joint angular vector
From Figure 1, we have the following equations of the inverse kinematics
Jacobian matrices
We have the following equations obtained from Figure 1

By differentiating equation (6) with respect to time, we obtain the following

Rearranging equation (7) leads to an equation under the matrix form

where
Jacobian matrices are expressed by the following equations


in which

Finally, equation (8) could be rewritten as follows

where

Equation (13) could be used for singularity analysis. It could be seen that the singularities of the 3-DOF planar parallel manipulator occur whenever
Dynamic modeling
In this section, the dynamic modeling of the 3-DOF planar parallel manipulator is presented in active joint space. For deriving the dynamic model, we follow the method presented by Le and Kang. 33 First, three passive joints C 1, C 2, and C 3 are virtually cut to form an equivalent open-chain system as shown in Figure 2. Second, using the Lagrangian approach, the dynamic model of the equivalent open-chain system can be computed and obtained as follows 34
The equivalent open-chain system obtained by virtually cut at C 1, C 2, and C 3.

in which


where
Since the parallel manipulator is controlled by actuating three active joints A
1, A
2, and A
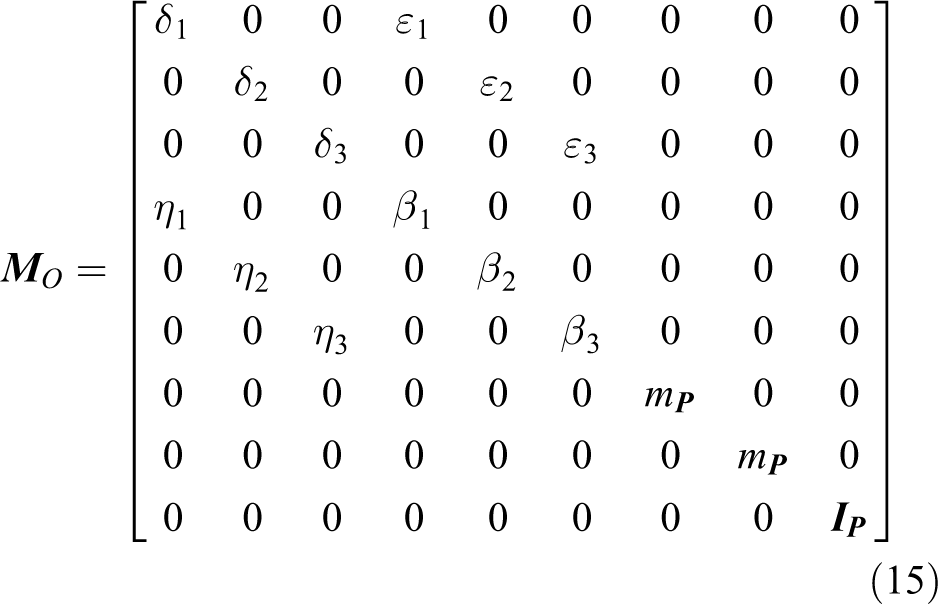
3, we need to develop the dynamic model in the active joint space with the input torque

where

where

where



By multiplying both sides of equation (14) by

In addition, we have the following relationships


By substituting equations (25) and (26) into equation (24) and rearranging the new equation, we obtain the following

where
The dynamic model in equation (27) satisfies the following properties, which were proved by Cheng et al. 36
In the presence of bounded uncertainties such as errors of dynamic model and external disturbances, we can express the actual dynamic model of the parallel manipulator by the following equation

where
Finally, we obtain the actual dynamic equation of the 3-DOF planar parallel manipulator as follows

in which Δ

Proposed adaptive SCTC
Define the tracking error

in which
In the synchronized control methods, not only the tracking error of each individual active joint must come to zero (eai (t) → 0, i = 1, 2, 3) but also the tracking errors of all active joints must be equal during the trajectory tracking control

The synchronization errors are defined as follows



The vector of synchronization error is
To accommodate both position error and synchronization error, cross-coupling error insight has been introduced to provide an effective method to eliminate the interconnections among multiple motion axes systems. The cross-coupling error is defined by the following
in which σ is the positive parameter and w is the time variable.
The reference tracking velocity and the reference tracking acceleration are defined as follows


in which
The proposed controller is expressed by the following equation

where

Flow diagram of the proposed synchronized computed torque controller.
The proposed controller has some major contributions. First, the combination of synchronization error and cross-coupling error with computed torque control algorithm brings about the advantages of the two methods such as the high accuracy and low online computational burden. The second contribution is the error estimators with online adaptation law, which helps to compensate the estimation errors of the neural network.
From equations (37) and (30), we obtain the following

We define

and then the compensative control law

in which

Structure of an RBFNN with L hidden units. RBFNN: radial basis function neural network.
The basis functions in the hidden layer are chosen as Gaussian function and can be expressed as follows

where
The output of the RBFNN is computed by the weighted sum method 40,41



The input vector

where
Then, the vector

It has been shown that for some sufficiently large number of hidden layer neurons, there are ideal weights and thresholds such that

where
Theorem
Consider the dynamic model in equation (29) of the 3-DOF planar parallel manipulator together with the proposed controller in equation (37). If we choose the following adaptation tuning laws for the RBFNN and the error estimators


then the closed-loop system is asymptotically stable.
Proof
By substituting equations (46), (47), (40), and (39) into equation (38), we obtain the following
where
Next, we define the error estimator as follows

where
Now, by substituting equation (51) into equation (50), we obtain the following
where
Equation (52) is equivalent to the following equation

For each active joint, supposed that state vector is defined as

in which

Then, the Lyapunov equation for each active joint can be formulated as follows

where
For analyzing the stability of the control system, a positive definite Lyapunov function candidate is chosen as follows

where
Differentiating V respect to time, we get the following

By substituting equations (53) and (55) into equation (57), we obtain the following

Now, by replacing the adaptation tuning laws in equations (48) and (49) into equation (58), we obtain the following

Since Qi is a positive definite matrix,

Or equivalent to (i = 1,2,3)

Thus, it is proved that, with the proposed controller, the actual active joint positions converge to their desired values.
Simulation
To illustrate the effectiveness of the proposed controller in this article, the simulations are performed for a 3-DOF planar parallel manipulator. Simulations are conducted by using the combination of Solidworks 2014 and SimMechanics of MATLAB [version 2013a]. First, the 3-D computer-aided design (CAD) model of the parallel manipulator is built in Solidworks. Each mechanical part of the parallel manipulator is designed separately and assembled using the suitable joints. Second, the 3-D CAD model is exported to an XML file by using the SimMechanics link plug-in. This link plug-in is downloaded from Mathworks official website. The XML file is then imported into Simulink environment. By this way, the geometry from the CAD assembly is saved as geometry files and associated with the proper body in SimMechanics. In the next step, joint actuators, sensors, and friction forces are added to the mechanical model. This mechanical model is then connected to the control algorithm block, which is written in Simulink.
In Solidworks, there is a special tool to verify the dynamic parameters of each component and the whole manipulator platform. The dynamic parameters are presented in Table 1.
Parameters of the parallel manipulator.

To evaluate the effectiveness of the proposed adaptive SCTC, the following control algorithms for the 3-DOF planar parallel manipulator are simulated and compared: 1. The traditional computed torque controller for parallel manipulator was presented by Le et al.
10

where
2. The SCTC without uncertainties and external disturbances compensation

in which
3. The proposed control algorithm is described by equation (37). The matrices
The desired trajectory of the end-effector of the 3-DOF planar parallel manipulator is

Friction forces at each active joint of the parallel manipulator are included as follows

The results of tracking trajectory are shown in Figure 5. The end-effector is controlled to track a circular in 20 s. The initial point of the end-effector of the manipulator is A 0(0.528,0.368). From Figure 5, we can see that the tracking trajectory caused by the conventional computed torque control algorithm has the biggest difference from the reference trajectory. The synchronized computed torque control algorithm (without uncertainties compensation) and the proposed adaptive SCTC produce better results than the conventional CTC. When focusing on the starting point A 0, it can be seen that the proposed SCTC has the fastest convergence speed to the reference trajectory among the three controllers.

Results of tracking circular trajectory of conventional CTC (green line), SCTC (blue line), and the proposed ASCTC (red line). CTC: computed torque controller; SCTC: synchronized computed torque controller.
Figure 6 shows the tracking errors of active joints 1, 2, and 3 of the parallel manipulator in active joint space. It is observed that the errors caused by the SCTC are much smaller than the errors associated with the conventional CTC. Especially the proposed adaptive synchronized computed torque controller (ASCTC) brings about the smallest tracking errors compared with the SCTC without uncertainty compensation and the conventional CTC. Additionally, it can be seen that the errors caused by the proposed ASCTC are very small, almost equal to zero.

Comparison of tracking errors in active joint space: (a) error of active joint 1, (b) error of active joint 2, and (c) error of active joint 3.
The tracking errors of the end-effector in the X-direction, in the Y-direction, and the error of rotary angle are shown in Figure 7. As can be seen from the figure, the SCTC produces smaller tracking errors compared to the conventional CTC. Interestingly, among the three controllers, the proposed ASCTC has the smallest tracking errors. Hence, we can conclude that the proposed ASCTC is highly efficient in control of a 3-DOF planar parallel manipulator. Additionally, it is concluded that the model uncertainties and external disturbances could be greatly tolerated using the proposed ASCTC.

Comparison of tracking errors of the end-effector: (a) error in the X-direction, (b) error in the Y-direction, and (c) error of rotary angle.
The weight tuning histories of the radial basis function network in each active joint are shown in Figure 8(a). The initial output weight matrices are

(a) The weight tuning histories of the radial basis function networks and (b) the results of online tuning, the output of error compensators.
From the simulations, we found that the major obstacle in the development of the control system with the proposed controller is the parameters of the RBFNN such as the centers and variances. It is quite difficult to choose the suitable values for these parameters. In future works, we are going to overcome this difficulty by applying the fully online tuning method for RBFNN, which was proposed by Le and Kang. 33
Conclusion
An adaptive synchronized computed torque control algorithm based on neural networks and error compensators has been proposed in this article. By integrating the definitions of synchronization error, and cross-coupling error of active joints with an adaptive computed torque control algorithm, the results inherit the advantages of both methods, such as the high accuracy and low online computational burden. The proposed control algorithm handles the uncertainties and external disturbances using a bank of neural networks and error compensators. The weights of neural networks and error compensators are adaptively tuned online during the tracking trajectory of the parallel manipulator. The stability of the closed-loop control system is theoretically proved by the Lyapunov method. The results of computer simulations verified the effectiveness of the proposed control algorithm. In the future research direction, a real implementation on the experimental system will be conducted.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by the Ministry of Education and Training (MOET) of the Socialist Republic of Vietnam, under grant number KYTH-17.