
Abstract
To improve the energy efficiency of the Mecanum wheel, this article extends the dynamic window approach by adding a new energy-related criterion for minimizing the power consumption of autonomous mobile robots. The energy consumption of the Mecanum robot is first modeled by considering major factors. Then, the model is utilized in the extended dynamic window approach–based local trajectory planner to additionally evaluate the omnidirectional velocities of the robot. Based on the new trajectory planning objective that minimizes power consumption, energy-reduction autonomous navigation is proposed via the combinational cost objectives of low power consumption and high speed. Comprehensive experiments are performed in various autonomous navigation task scenarios, to validate the energy consumption model and to show the effectiveness of the proposed technique in minimizing the power consumption and reducing the energy consumption. It is observed that the technique effectively takes advantage of the Mecanum robot’s redundant maneuverability, can cope with any type of path and is able to fulfil online obstacle avoidance.
Keywords
Introduction
The Ilon Mecanum wheel is one of the practical omnidirectional wheel designs utilized in the industry, and it has the advantage of high load capacity over other omnidirectional wheel designs. 1 However, the Mecanum wheel trades off maneuverability against motion efficiency, and its inefficient energy usage for generating omnidirectional motions increases the energy consumption of the robot. 2 Energy-efficient autonomous navigation has been explored very little for the Mecanum robot. A local trajectory planning method that both reduces overall energy consumption in the global sense and reactively avoids unexpected obstacles is essential to realize energy-efficient autonomous navigation. It is both economically valuable to reduce energy consumption of the Mecanum platforms by planning its redundant omnidirectional motion trajectories and academically interesting to achieve energy-efficient autonomous navigation via a local planner.
Energy-efficient motion planning methods have been applied to reduce the energy consumption of mobile robots. Mei et al. introduced a method of reducing energy consumption of mobile robots for open area exploration via energy-efficient motion planning. 3 Up to 51% of energy savings were demonstrated for a search of an open area by comparing the energy efficiencies of different motion trajectories. The energy consumption of the robot was modeled by using a sixth-degree polynomial to fit the relationship of motor speed and power consumption. Sun and Reif concentrated on the robotic energy-minimum path planning problem on terrains. 4 The energy cost in their study was based on gravity and friction. Recently, Liu and Sun proposed an experimentally validated energy model for a wheeled mobile robot by considering kinematic energy transformation, overcoming resistive friction and electric supply of onboard devices. Then, a model-based energy criterion was added into the A* algorithm to find the energy-minimum path. 5 To follow the found path, they proposed parameterized smooth trajectory planning using a cubic Bezier curve for minimum energy consumption. In the works of Yang et al., 6 polynomial parameterization was applied to analytically find the near minimal-energy, real-time, and collision-free path while considering for other criteria for a carlike mobile drive. The modified Newton algorithm was used by Duleba and Sasiadek 7 to optimize the energy consumption in the nonholonomic motion planning. But these methods only apply to nonholonomic mobile robots and do not consider the online local energy-efficient trajectory planning problem.
Kim and Kim studied online minimum-energy trajectory planning of both nonholonomic and holonomic drives on a straight-line path. 8,9 Their energy cost function is the sum energy drawn from the onboard batteries and includes energy dissipation by the motor armature, the energy overcoming frictions, and the kinetic energy of the robot. A closed-form solution of the minimum-energy rotational velocity trajectory was found by using Pontryagin’s minimum principle, and the minimum-energy translational velocity trajectory was found using a new researching algorithm. Their results showed that following the same straight-line path via different velocity profiles consumed different amounts of energy. But their studies were restricted to straight-line paths and stationary states in the beginning and at the end, and hence become less practical for autonomous navigation.
Because mobile robots usually source energy from batteries that store limited energy, most of the existing energy-efficient studies aim to minimize the energy consumption instead of the power consumption. The robotic energy consumption to complete a task is the integral of its power consumption over the task duration. The power consumption, which is the energy spent per unit of time, is also a critical criterion to design and control mobile robots with self-sustaining power supplies such as solar power. 10 –13 Energy-conservation techniques are proposed by Mei et al. to improve energy efficiency for mobile robots by reducing power consumption of the robotic electronic components. 14 The issue of the power minimization via motion planning for holonomic mobile robots with redundant maneuverability has not been fully studied.
For the purpose of reducing the energy consumption of the autonomous Mecanum robots, an online local trajectory planning method is proposed in this article, aiming for power-minimization and energy-reduction autonomous navigation. The method extends the popular robot operating system (ROS) dynamic window approach (DWA) local trajectory planner by integrating a novel energy consumption model of the Mecanum mobile robot as a new energy-related criterion. The DWA is a well-known reactive collision avoidance navigation concept 15 and it has proven performance over a range of extended applications. 16 –18 The contributions of this article include the following two aspects. First, a novel energy consumption model of the four-wheeled Mecanum robot was built, validated by experiments, and in this article, utilized to extend the DWA local trajectory planner. Second, the DWA was extended by means of adding the energy consumption model as a new criterion for minimizing the power consumption of the autonomous Mecanum robot. Based on the proposed extended DWA that can minimize power consumption, energy-reduction autonomous navigation is proposed via the combinational cost objectives of low power consumption and high speed. Comprehensive experiments are performed to validate the energy consumption model and show the effectiveness of the proposed technique in optimizing the power consumption and reducing the energy consumption in various autonomous navigation task scenarios. Comparing to the preliminary publications 19,20 of this article, the major improvements include integrating the novel energy consumption model of the Mecanum platform into the DWA framework, introducing a new cost objective of minimizing the power consumption to the DWA, and conducting more comprehensive experiments.
The reminder of the article is organized as follows. The dynamics and the energy consumption model of the Mecanum robot is reviewed in “Energy consumption model” section. “Extended DWA local trajectory planner” section describes the process of extending the DWA by introducing a new energy-related criterion. Experimental results are discussed to validate the proposed energy consumption model and to investigate the effectiveness of the proposed technique applied as a local trajectory planner in autonomous navigation in “Experiments” section. “Conclusion” section concludes this article.
Energy consumption model
In this study, the four-wheeled Mecanum mobile robot 21 is considered, and its energy consumption is modeled, which considers the idle energy required for standby and the motional energy consumed for kinetic energy transformation, overcoming robotic traction resistances, electric dissipation in the motor armatures, and mechanical dissipation in the actuators. The main challenge is the complicated dynamics of the omnidirectional Mecanum platform.
The dynamics
Figure 1 shows the schematic diagram and the image of the robot. The front of the robot is defined at the side of the chassis where the second and third wheels are placed. A coordinate system Oxryr is rigidly attached at the mass center of the chassis and is related to the global coordinate system OXGYG. Angle ∅ is the angular displacement or orientation of the robot, and angle φ defines the heading direction of the robotic motion, measured anticlockwise from the yr-axis. Translational displacements X and Y define the center of mass of the robot. Thus, the position and orientation of the robot are represented by


The four-wheeled Mecanum mobile robot. (a) Schematic diagram, viewed from beneath and (b) the built robot, system parameters given in Table 1.
in which


where r is the radius of the wheel,
The dynamics of the robot was modeled in the authors’ previous study, 20 repeated in the following

in which



where m is the mass of the robot; I is the moment of inertia for the rotation of the robot;



in which Ni is the normal force on the wheel; μs, μr, and μv are the sliding, rolling, and analogue viscous friction coefficients, respectively; and
Energy consumption model
The total energy consumption Etotal of the robot consists of the idle energy Eidle and the motional energy Emotion

where Eidle is consumed by the idling robot consisting of the idling motors and onboard electric devices, including embedded PC, sensors, electric drives, and other electrical devices, and the idle power Pidle is experimentally found to be constant over time t in this study

where Emotion is the energy consumed to attain and sustain robotic motion, and the motional power Pmotion is motion-dependent

in which Ek, Ef, Ee, and Em are, respectively, the changes in robot kinetic energy, the frictional dissipation to overcome the traction resistances, the energy dissipation as heat in the armatures of motors, and the mechanical dissipation caused by overcoming the friction torque in the actuators, including motor shafts and bearings, which are expressed by




where Jw is the moment of inertia of the wheel along the rotation axis, Ra is the armature resistance of each motor,
Given an arbitrary velocity profile

in which kt is the torque constant.

in which n is the gear ratio of the motor gear box.
Other energy losses are considered as minor losses and are neglected in this study. The dynamics of the motor is also neglected.
Extended DWA local trajectory planner
The ROS navigation stack 25,26 employs both a global path planner and a local trajectory planner for motion planning. Given the feasible path from the global planner to follow, the local trajectory planner works online to continuously update the local velocity commands for the robot to execute for the next short period of control cycle. This is because the autonomous robot must react to its surrounding environment that is subject to change. Since the global path planning in autonomous navigation is usually reduced to a 2-D representation by assuming the robot to be a point, 27 the proposed energy-efficient path planning methods by Sun and Reif 4 and Liu and Sun 5 are applicable to both nonholonomic and holonomic mobile robots. Thus, this study only focuses on the autonomous navigation local trajectory planning. An extended DWA local trajectory planner is proposed. The DWA has two steps: search space and optimization. The DWA is extended by additionally employing a new energy consumption cost function to search for the optimal omnidirectional velocity trajectories in a cuboid space.
Cuboid search space
The robot concerned is holonomic with a triplet of omnidirectional velocities
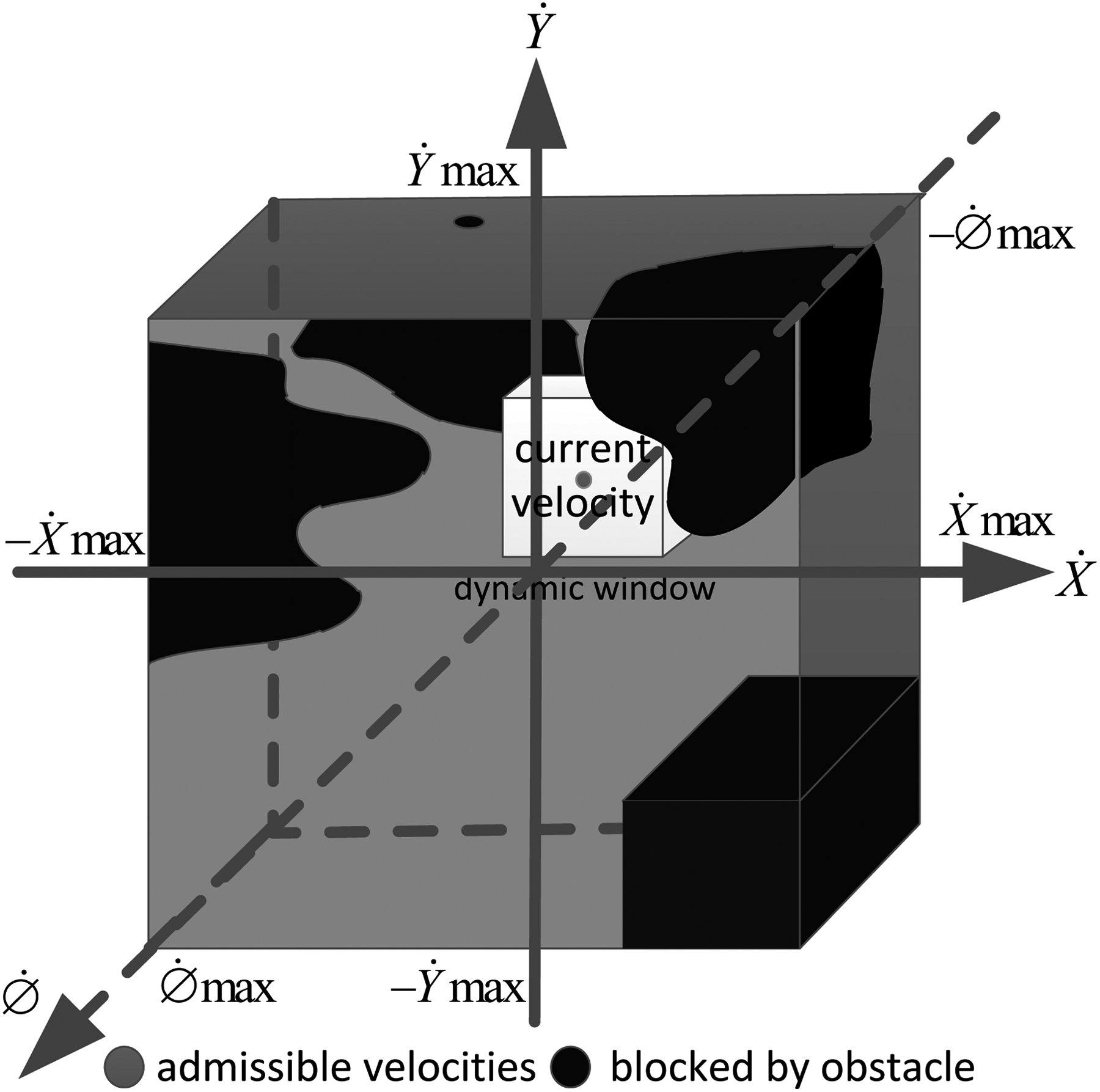
Cuboid search space.
Optimization
In this study, the cost function in equation (20), which is based on the ROS dwa_local_planner, is put forward for optimizing the omnidirectional velocities by minimizing the cost

Local trajectory planning is aimed to track the given path and approach the local goal while avoiding any unforeseen obstacles. Here, the unforeseen obstacle is defined as the unknown obstacle in the global map and can only be detected by the robot’s local sensor readings. Thus, the first three existing terms are associated, respectively, with how much the robot stays close to the given path, how fast the robot approaches the local goal, and how far the robot stays away from an obstacle, and the new fourth term is for how much the robot minimizes its power consumption.
Optimization of power consumption
Within a local dynamic window, all potential velocity trajectories are over the same forward-simulation time TDW, and consequently, the idle energy consumption is the same and does not need to be included in energy_consumption. That, instead, can be calculated by equation (13). The velocity trajectories are evaluated within the local time window that rolls forward. The energy consumption is optimized in the constant-time window and hence contributes to minimizing the overall average power consumption of the resulting trajectories in the global sense for autonomous navigation. (The mathematical proof is presented in Appendix 1.) Thus, e_bias determines the bias of optimizing the power consumption against other cost objectives.
Reduction of energy consumption
It is difficult to realize overall energy optimization only via the local trajectory planning. To follow the same global path, the accumulation of the energy optimization in each local window does not necessarily achieve overall energy optimization in the global sense for autonomous navigation. Additionally, it is worth mentioning that the local trajectory planner relies on the given paths from the high-level global path planner. This means that the proposed local trajectory planning method cannot guarantee a global path that leads to minimum energy consumption from a starting pose to a goal pose. It is the responsibility of the global path planner to avoid the areas of high energy cost, such as the ground with high friction in the works of Liu and Sun. 5
Another aim of this study is to reduce the overall energy consumption via the extended DWA local trajectory planner. Energy is the integral of power over time. Both low average power consumption and low task duration can reduce the overall energy consumption. The overall average power consumption and the task duration in the global sense can both be reduced by the proposed extended DWA. An original cost function term goal_distance controls speed by minimizing the distance to the local goal from the endpoint of the trajectory. The combinational cost objectives of low motional power consumption and high speed are proposed to reduce the overall energy consumption via high weighting of g_bias and e_bias.
Local trajectory planner implementation
The proposed extended DWA technique is applied as a power-optimal local trajectory planner for the energy-efficient autonomous navigation. The conventional DWA has already been implemented in the ROS navigation stack as a popular local trajectory planner. To implement the proposed extended DWA technique, it simply adds a robotic energy consumption cost term into the cost function of the conventional DWA. As equation (20) presents, energy_consumption is the added robotic energy consumption cost term that is based on the proposed energy consumption model, while the rest are the original cost terms in the ROS DWA planner. The TrajectoryCostFunction class in the ROS navigation stack base_local_planner program manages the DWA cost function.
Experiments
The Mecanum wheeled robot in Figure 1 was used in this study, which is equipped with an embedded PC CX5020, four AC servomotors AM3121 with 4 × 140 W rated power and ROS Hydro with 2-D navigation stack that was configured for the robot to move toward a goal pose using velocity commands. The key parameters of the robot and their values are given in Table 1. A current sensor was used to measure the current of the robotic battery. Depending on the battery’s state of charge, the robotic idle current ranges from 1.4 A to 1.6 A. Thus, the same group of experiments were conducted under the same level of battery’s state of charge.
Model parameters of the robot.

Experimental validation of the energy consumption model for the four-wheeled Mecanum mobile robot
To validate the derived energy consumption models, the actual energy was measured in this group of experiments for the purpose of comparisons when the robot performed three primitive omnidirectional motions that include pure translation in the xr-direction and yr-direction, and rotation about the origin of Oxryr. All the motions were tested on concrete at two speeds: ±0.025 and ±0.05 m/s for translation in the xr-direction, 0.05 and ±0.1 m/s for translation in the yr-direction, and ±0.0125π and ±0.025π rad/s for rotation. Each motion test lasted for 2 s, including 0.15 s acceleration from stationary, 1.75 s constant velocities, and 0.1 s deceleration to stationary. After each run of primitive motion, the robot stayed stationary for 2 s before the next run. Each experiment was repeated three times.
The proposed energy consumption model, implemented in MATLAB, simulates the predicted energy consumptions according to the described motions above. The experimental results are given in Table 2, where it is shown that the robot consumed a consistent amount of energy to perform the same omnidirectional motion under the same surface conditions, and the calculated energy consumption using the energy consumption model in the simulation agrees with the measured energy with an accuracy of 95%. The currents that the robot consumed to perform the set of primitive motions are plotted in Figure 3. The difference between the simulated and experimental current plots is mainly caused without considering the high starting currents in the servomotors.
Simulated and experimental energy consumption.


Current plots of experiment and simulation.
Experimental validation of the power-optimal local trajectory planning
Given the planned path, the local trajectory planner determines the resulting trajectory for autonomous navigation of the robot by updating the local velocity control commands every control cycle. In the ROS dwa_local_planner, the sim_time is 1.7 s, controller_frequency is 20 Hz, and the sim_granularity is 0.025 m. The sim_time is the entire time of the DWA simulating trajectories within one dynamic window as TDW, the controller_frequency is the frequency at which the dynamic window is called, and the sim_granularity determines the step size between the points in the trajectories. Five types of the planned paths in three task scenarios were tested, including three straight-line paths with different final poses, one curve-line path and one obstacle avoidance path, as shown in Figure 4(a) to (c), respectively.

Test paths. (a) Straight-line paths in scenario one; (b) curve-line path in scenario two; and (c) reactive obstacle avoidance path in scenario three.
Since each term of the ROS DWA cost function is mathematically expressed in different units according to equation (20), the tuning parameters are on different scales. For the purpose of clear expression, the ratios α, β, γ, and δ are used in the experimental studies to represent the weighting of path closeness, speed, obstacle avoidance, and motional power optimization, respectively, by calculating the corresponding cost percentage

Based on the default values given in the ROS dwa_local_planner, the robot was initially tuned by using
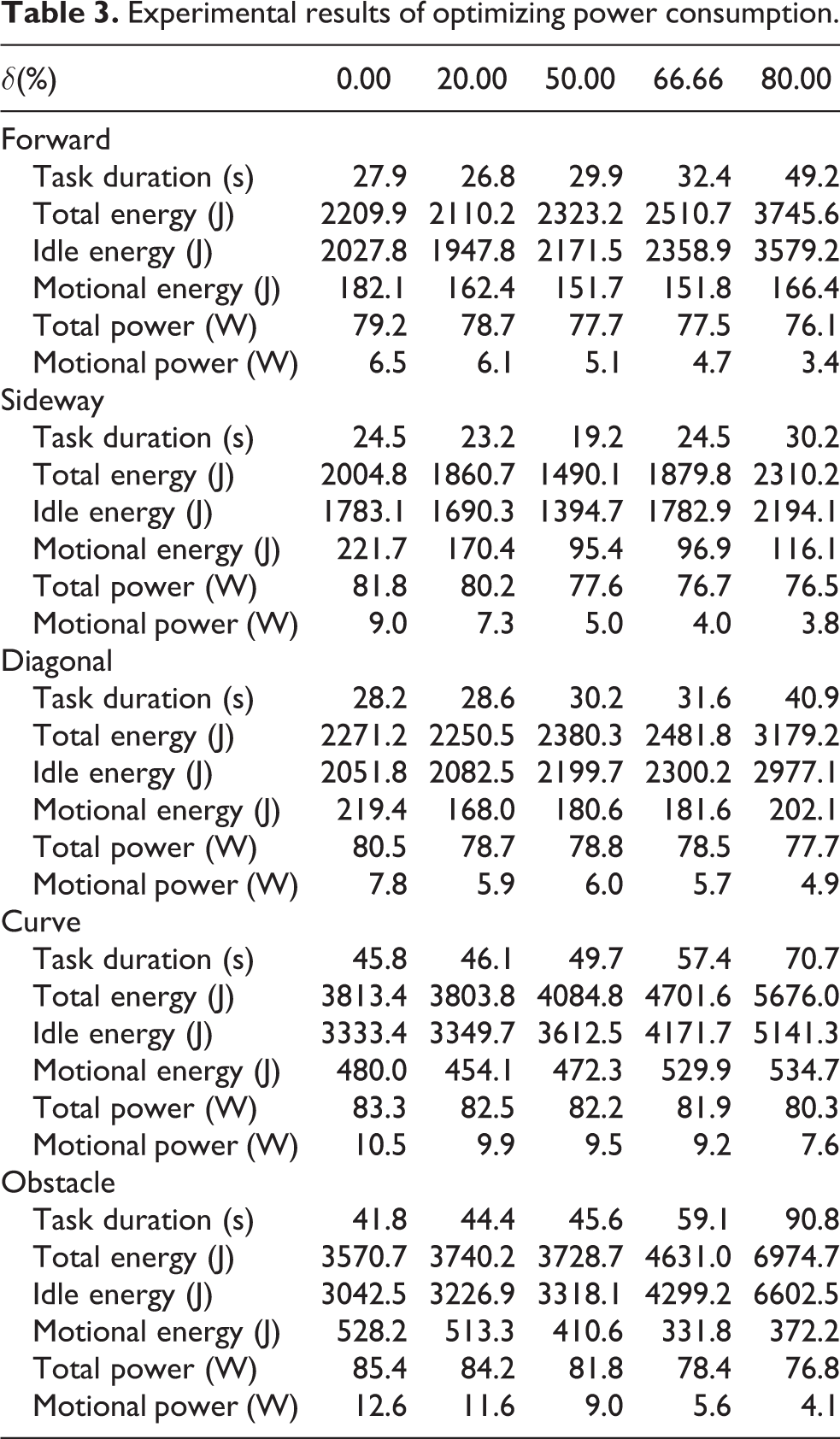
Task duration, energy, and power of the resulting trajectories are summarized in Table 3. It is shown that the increase in δ reduces both the total power and the motional power of the robot in all the scenarios, which proves the effectiveness and significance of introducing the energy consumption into the cost function for optimizing the robotic power consumption. Reducing the idle power of the robotic electronics components is not within the scope of this study. The motional energy consumptions did not always decrease with the decreasing motional power as shown in Figure 7.
Experimental results of optimizing power consumption.
In the experiments, two laser range scanners were used to record the translational and rotational displacements of the robot and detect the unforeseen obstacles near or around the robot. Given the sideways straight-line path in Figure 4(a), two resulting trajectories of the robot are depicted in Figure 5(a) and (b) when

Trajectory of following a sideways straight-line path. (a) Energy weight ratio of 20.00%. (b) Energy weight ratio of 80.00%.

Trajectory of avoiding an unforeseen obstacle. (a) Energy weight ratio of 0.00%. (b) Energy weight ratio of 66.66%.
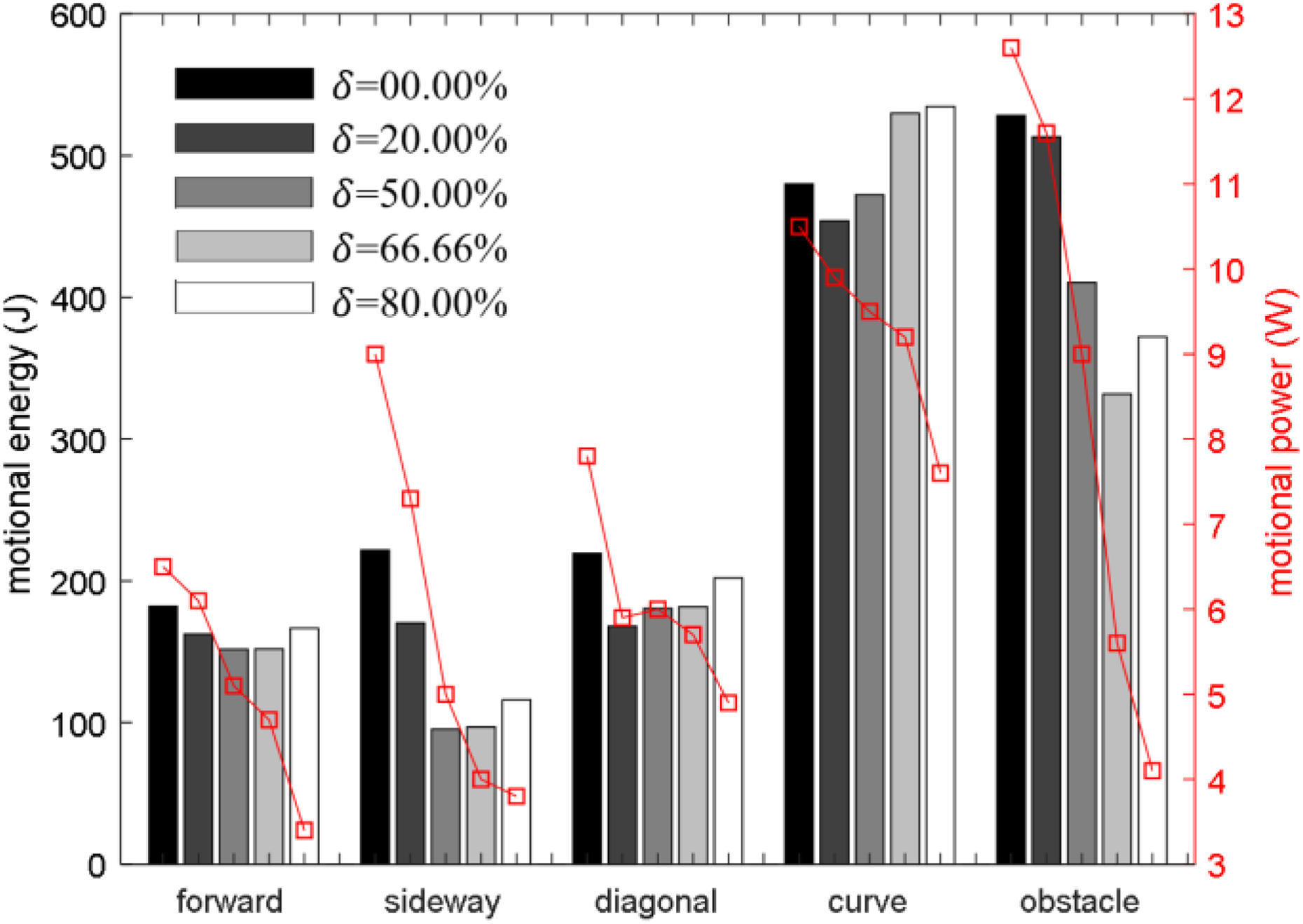
Motional energy and motional power in the experiments.
Experimental validation of energy reduction via the combinational cost objectives
Experiments are conducted to follow the given paths in Figure 4. Again, the ratios α, β, γ, and δ are used in the experimental studies for the purpose of clear expression. To demonstrate the effectiveness in reducing the total energy via the proposed combinational cost objectives of both low motional power consumption and high speed, the weight ratios of α, β, γ, and δ are varied as shown in Table 4.
Experimental results of reducing energy consumption.
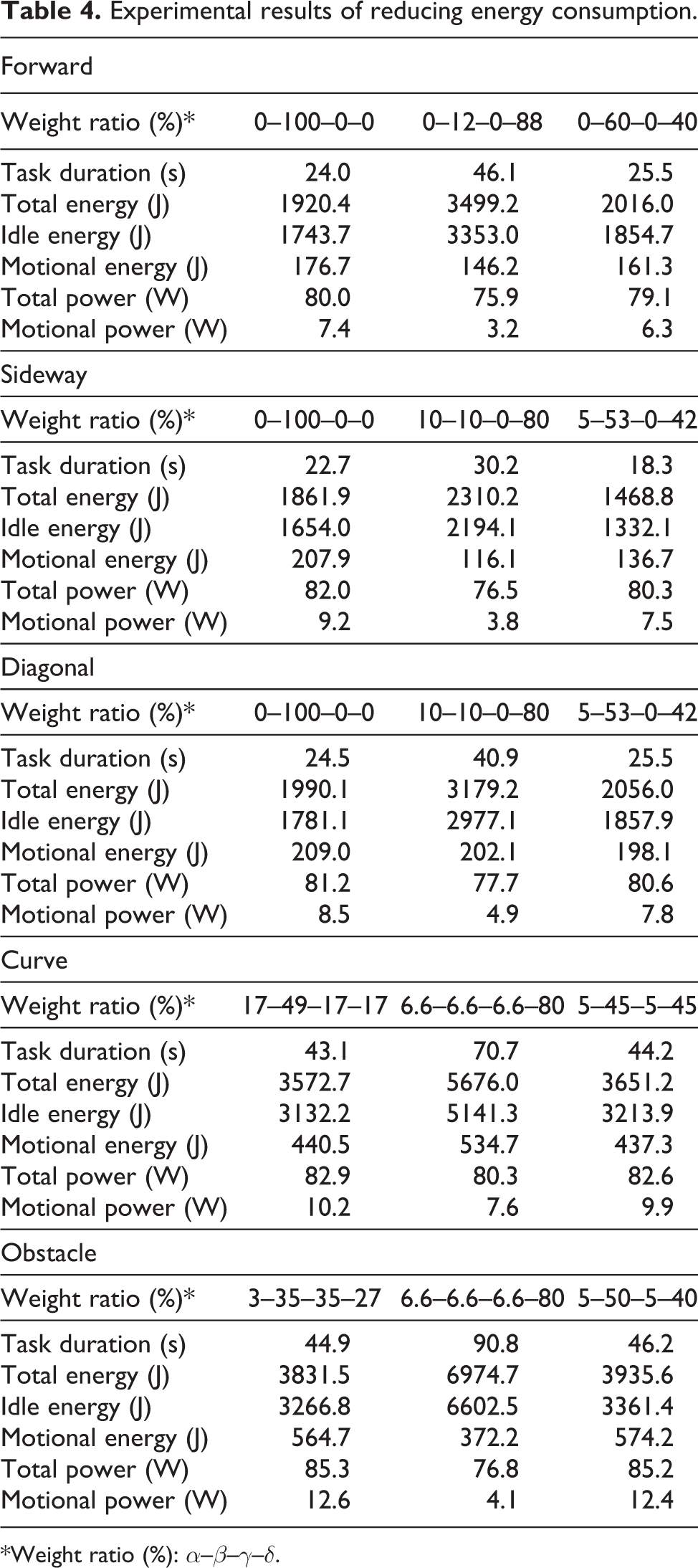
*Weight ratio (%): α–β–γ–δ.
The experimental results are given in Table 4, where it is found that the task duration is reduced due to the high speed of the motion, by utilizing a higher β. The smaller duration contributes to less idle energy consumption due to the constant idle power consumption. However, utilizing a high β does not lead to low motional energy due to the high motional power. The use of both higher β and δ reduces the total energy consumption, comparing to the results in Table 3.
In the experiments, it is found that the idle power of the robot is much higher than the motional power. So, the idle energy consumption of the robot is also much higher than the motional energy. β makes a significant contribution to reducing the idle energy consumption of the robot by reducing the task duration. Thus, β is significant, and a higher β can result in less total energy consumption for the experimental paths used in this study. However, it is worth mentioning that both high β and δ result in the trajectories that consume less motional energy to follow the straight-line and curve-line paths than single high β does. In particular, to follow the sideways straight-line path, high β and δ result in the trajectories that consume less idle energy due to the holonomic mobility of the robot.
Discussion
The energy consumption of the mobile robot is a complex problem involving many influence factors. According to the existing methods, building a reliable energy consumption model for the target robot as a solid base is the common approach to solving this problem. The proposed energy consumption model of the four-wheeled Mecanum robot considers the validated factors from the recent energy model works by Liu and Sun 5 and Kim and Kim. 9 The proposed model has been experimentally validated in this study. The experimental energy consumption results in Table 2 show the consistency and accuracy of the model. Thus, the proposed model can be used to predict the robotic energy consumption in DWA. This model is specific to the four-wheeled Mecanum robot by considering the unique dynamics of the Mecanum wheel in omnidirectional motions. Different dynamics should be accommodated in the model in order to cope with other mobile robots. Comprehensive experiments have been performed to show the effectiveness of the proposed technique in optimizing the power consumption and reducing the energy consumption in various autonomous navigation task scenarios. The experiments also prove that the proposed extended DWA local trajectory planning method can cope with any type of path. The experimental results in Table 3 show that the proposed extended DWA-based local trajectory planning method minimizes the robotic power consumption in the global sense for autonomous navigation. It is also observed from Figures 5 and 6 that the proposed technique takes advantages of the redundant maneuverability of holonomic mobility to optimize the power consumption, and it can conduct online obstacle avoidance in the power-optimal way. Comparing the experimental results in Table 4 to the results in Table 3, the overall energy consumption in the global sense is reduced via the combination cost objectives of both low power consumption and high speed. But the overall energy consumption in the global sense is not optimized in this study.
Comparing to the authors’ preliminary publication, 19 which proposed a local planning method of considering both local and global energy consumption, this article does not utilize any global information in the local planner. It is difficult to realize absolutely energy-optimal autonomous navigation with only the effort of a local planning method without considering the global information. The accumulation of the energy optimization in each local planning does not necessarily achieve overall energy optimization in the global sense for autonomous navigation. However, the DWA local trajectory planner works in such a way that the optimal velocities of each control cycle are evaluated within each local time window that rolls forward. So, the energy optimization in each constant-time local window achieves the power optimization in the local window and also the overall average power optimization in the global sense. With the power optimization being a new cost objective, the overall energy consumption in the global sense is reduced via the combinational cost objectives of both low power consumption and high speed.
Conclusion
This article extends the DWA by considering a novel energy consumption model of the Mecanum mobile robot as a new energy-related criterion for the purposes of optimizing power consumption and reducing energy consumption for energy-efficient autonomous navigation. The energy consumption model of the four-wheeled Mecanum robot is built for energy prediction in the DWA. For a given path, the proposed technique optimized the local velocity trajectory based on a cost function involving the energy consumption. The optimization of power consumption and the reduction of total energy consumption were made possible by taking advantage of the holonomic mobility of the Mecanum robot. In addition, the proposed technique can cope with any type of path and is still able to fulfil online obstacle avoidance as the traditional DWA does. Experiments were conducted to validate the energy consumption model and to show the effectiveness of the proposed technique in various autonomous navigation task scenarios.
Footnotes
Acknowledgment
Xie would like to thank the University of Auckland for awarding the Doctoral Scholarship to him.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.