
Abstract
Robot manipulators are mostly used to complete positioning tasks, and the conventional approach utilizes position-based control scheme, which converts a robot control problems to several motor control problems, where encoder signals are used to fulfill feedback control. This control scheme might not provide excellent positioning accuracy due to the lack of the dynamics of robot manipulators. This article presents a simple model-based control scheme to achieve the positioning control and applies the scheme to a Delta robot, which can perform the motion with three translational degrees of freedom. The proposed scheme first evaluates the applied torques of motors based on robot’s kinematics and dynamics using the encoders, and then the evaluated torques are sent to controllers to fulfill feedback control. The entire control loop is little similar to torque control, but torque or current sensors are not used. To demonstrate the performances of the proposed scheme, not only the numerical simulations are performed but also the experimental work is conducted. Both results are compared with those by applying the position-based control. The results show that the proposed model-based control scheme provides better positioning accuracy.
Introduction
Parallel robot manipulators have broadly applied in industry due to their advantages such as high speed, high stiffness, high accuracy, low moving inertia, and so on. The Delta robot is one of the most common parallel robot manipulators, because it is usually applied to operate a pick-and-place task under the requirements of high moving speed and high positioning accuracy. 1,2
Over the past decades, there are numerous researchers studied the motion control of a Delta robot. Castañeda et al. designed an adaptive controller, which aims to achieve the trajectory tracking for a Delta robot with uncertainties. Besides, the adaptive controller is incorporated with an observer due to the lack of the measurements of the joint velocities of the Delta robot. 3 Ramírez-Neria et al. investigated a robust trajectory tracking, where the controller is based on a linear feedback control and is capable of actively rejecting disturbance using a linear disturbance observer. 4 Guglielmetti and Longchamp developed a Delta robot model, where the state variables are the joint angles and the end-effector coordinates. Besides, the applied torques can be evaluated for the purpose of achieving a linear feedback control. 5 Lu et al. developed a type-2 fuzzy logic controller for the trajectory tracking control of the Delta robot. The controller is designed based on a type-1 fuzzy logic controller, whose membership functions are blurred by three methods to generate the type-2 fuzzy sets. 6 Dumlu and Erenturk applied the classical proportional-integral-derivative (PID) control and the fractional-order PID control to a Delta robot so as to improve the trajectory tracking performances. The controller parameters are obtained using the pattern search algorithm and mathematical methods for the classical PID control and the fractional-order PID controller, respectively. 7 Lin et al. implemented a smoothing robust control method, manifold deformation design scheme, to guarantee the smoothly and robustly dynamic behavior as designed. 8 This method has the capabilities of dynamics prediction and disturbance estimation and then outputs the control efforts to deform the dynamic manifold of the controlled plant into the desired manifold. Zhang et al. investigated the conveyor tracking of a Delta robot, and the controller design is based on a computer vision system and encoder signals so as to compute the joint torques. 9 Rachedi et al. applied the H∞ controller to a Delta robot, where the controller is multi-input multi-output centralized feedforward control based on the computed joint torques. 10
Generally speaking, there are two types of control schemes for robot manipulators, position- and model-based control. The position-based control divides a manipulator as many separated active joint systems, and each active joint is considered as position control of a motor. 11 –13 This type of control scheme might not always produce high positioning accuracy due to the lack of the dynamics of manipulators. However, the model-based control incorporates the dynamics in the controllers. Many researchers studied various model-based controls and applied them to robot manipulators. Diaz-Rodriguez et al. applied a passivity-based controller to a three degrees of freedom (3-DOFs) prismatic-revolute-spherical parallel manipulator, where a manipulator is simplified as a reduced model. 14 Zhang et al. proposed an ankle assessment and rehabilitation robot, which can perform a real-time ankle-assessment three-dimensional (3-D) robotic training, where the control is an open-loop controller. 15 Besides, an experiment was performed on a healthy person. Meng et al. investigated a trajectory tracking of a 6-DOF parallel robot, where a model-based controller was proposed based on the off-line multibody dynamics of the robot. This approach can save the online computations. 16 Gao et al. proposed a three-axis parallel mechanism, which is used to test the reliability of multiaxis CNC machine tools. The mechanism exerts specific load spectrums on the spindle, and the dynamic model is derived by employing the virtual work principle. Besides, the controller is designed based on the established model. 17 Zhang et al. developed a trajectory tracking controller and applied it to a 2-DOF translational parallel manipulator, which is driven by linear motors. 18 The controller is designed based on a dynamic model, where a cascade PID/PI controller and a velocity feedforward controller are incorporated.
To obtain precise position control without implementing additional sensors, the computed torque control is developed based on inverse dynamics of robots. Codourey presented the control of a Delta robot by implementing the computed torque approach, where the torque is obtained by applying the dynamic equations, which is derived based on the virtual work principle. 19,20 The derived equations lead to complicated formulations, because the mass matrix in the equations is determined using the Jacobian matrices for each component in the robot. Therefore, the author proposed an approach to simplify the mass matrix, which does not explicitly appear in the formulations. Yang et al. investigated the motor-mechanism dynamics of a 2-DOF parallel manipulator, and the computed torque control combined with a PID controller was applied to the manipulator, where the controller parameters are determined using the three-layer neural network algorithm based on the errors of the angular displacements and velocities. 21 Conventionally, the computed torque control is usually applied with a linear PD controller. Shang and Cong developed a nonlinear computed torque control to combine with a nonlinear PD controller and applied the control to a planar parallel manipulator, whose stability is proven using the Lyapunov theorem. 22 Shang et al. proposed an adaptive computed torque controller for the trajectory tracking of a 2-DOF parallel manipulator with redundant actuation, and the dynamic model includes the frictions of active joints, which are determined by the adaptive laws. 23 Masarati applied it to redundant manipulators using general-purpose multibody formulations and software tools, where the control scheme consists of inverse kinematics to compute positions, velocities, and accelerations and inverse dynamics problem to compute feedforward generalized driving forces. 24
In reviewing literature, the computed torque control relies on inverse dynamics combined with a tracking control of angular displacements and velocities, and some researchers applied the control law with feedforward control. This article aims to provide a simple model-based control scheme, where the computed torques are obtained based on kinematics and dynamics of manipulators without applying feedforward control. The control scheme is little similar to a torque control, but torque or current sensor is not implemented. Thus, encoders are the only sensors used to compute the applied torques. The proposed approach is applied to a Delta robot, whose motion has three translating DOFs. This article is organized as follows. “Kinematics and dynamics of a Delta robot” section introduces the kinematics and the dynamics of the Delta robot. “Model-based tracking control” section proposes a model-based control scheme for the robot. “Experimental setup” section presents the experimental setup and validation. “Experimental and simulation results” section demonstrates the experimental and simulation results. “Conclusions” section summarizes some significant conclusions.
Kinematics and dynamics of a Delta robot
A Delta robot consists of three kinematic chains, and each chain consists of two links (AiBi and BiDi, where i = 1, 2, 3, see Figure 1). Each chain links a fixed base (triangle A1A2A3) and a moving platform (or called an end effector, triangle D1D2D3), where three motors are mounted at points Ai to drive links AiBi. A coordinate system is defined on the fixed base, and the origin is located at its center, where the X-axis is arbitrarily defined on the base, the Z-axis is downward and perpendicular to the base, and the Y-axis is orthogonal to the X- and Z-axes. Thus, the motion of the end effector is driven by the three motors through the three kinematic chains, and the end effector has the 3-DOF translating motions. Based on the geometry of the Delta robot, each point Ai has 1-DOF rotating motions, and each points Bi and Di have 2-DOF rotating motions.

Schematic diagram of a Delta robot.
Kinematics
The size of each kinematic chain is assumed to be identical as shown in Figure 2, where L1, L2, rA, and rB are
the lengths of BiDi, AiBi, OAi, and DiP,
respectively; φ1i
is the rotating angle of link AiBi
with respect to the fixed base; φ2i and φ3i are the rotating angles of link BiDi with respect to link AiBi. Based on the geometry of the Delta robot, the
position of point P at end effector with respect to the
XYZ coordinate is written as Schematic diagram of a kinematic chain (a) from a 3-D view and (b) on the x–y plane.

Equation (1) represents the position of point P through one of the three kinematic chains. By eliminating the passive joint angles ϕ2i and ϕ3i, equation (1) can be simplified as

where

Direct kinematics
The direct kinematics determines the position (XP,YP,ZP) of the end effector of a Delta robot using the given active joint angles ϕ1i. Equation (1) represents three spherical equations, whose center and radius are (Xi, Yi, Zi) and L2, respectively, and the equations are functions of the position (XP,YP,ZP). Therefore, the intersection of the three spheres is the solution of equation (1). Besides, there are four possibilities after solving the equations (for more details see the study by Tsai 25 ).
Inverse kinematics
The indirect kinematics determines the active joint angles ϕ1i based on a given position (XP,YP,ZP) of the end effector. By expanding equation (2), the equation can be reduced as

where

Equation (3) refers to the functions of the active angles ϕ1i, which can be determined by a single equation of equation (3), and four possibilities can be obtained after solving the equation. 26
Workspace
The workspace of the Delta robot is a 3-D region which can be attained by the end effector of the robot. Based on equation (3) and trigonometry, the equation must satisfy the condition as

Note that equation (5) is a function of the position (XP,YP,ZP) of the end effector only. Therefore, substituting any position (XP,YP,ZP) can check if it is within the workspace of the robot or not.
Singularities
The singularities of the Delta robot interpret the relationships between the joint rates of the Delta robot and the velocities of the end effector. There are two types of singularities, direct singularities and inverse singularities, and they are determined by examining the singularities of Jacobian matrices. Taking the time derivative of equation (2) leads to

where

The direct singularities are determined by calculating the roots of the determinant of JP. Although it is complicated to find them, a solutions is ϕ3i = 0, π or ϕ1i + ϕ2i = 0, π. 17 Similarly, the inverse singularities are determined by evaluating the roots of the determinant of Jϕ, and the solutions are ϕ2i = 0, π or ϕ3i = 0, π.
Dynamics
To investigate the dynamics of the robot, one assumes that there are no frictions on all joints and no flexibility on all links. The dynamic equations of the robot will be formulated by applying the Lagrange’s equations. The kinetic and potential energies of the robot are first written as

where mP, m1, and m2, respectively, refer to the masses of the end effector, the links AiBi, and the links BiDi.
Since equations (8) and (9) are the functions of six variables XP, YP, ZP, and φ1i, the Lagrangian should incorporate with three constraint equations as equation (2), which leads to the dynamic equations as



where λi are the Lagrange multipliers; FPX, FPY, and FPZ are the applied external forces at the point P; τi are the applied external torques at the active joints. Note that equations (10) to (13) are functions of nine variables XP, YP, ZP, φ1i, and λi. Therefore, the equations will be solved with the constraint equations as equation (2). These equations are differential-algebraic equations.
An alternative application of the equations is used to determine the applied torques
τi, and the procedure is explained as
follows. The kinematic equations shown in equation (2) are solved, and then the
active angles ϕ1i and the coordinates XP,
YP, and ZP can be obtained. Moreover, the first- and second-time
derivatives can be calculated. The Lagrange multipliers λi can be
obtained by solving equations (10)
to (12), where
the applied forces FPX, FPY, and FPZ are given. The applied torques τi can be calculated
using equation
(13).
This procedure can be used for a torque control of the robot. Besides, the proposed control scheme applies this procedure to compute the desired torques and the real torques, which will be presented in the next section.
Model-based tracking control
Path planning
A Delta robot is usually applied to a pick-to-place operation. For a specific 3-D trajectory such as a straight line, a circle, a parabola, and so on, the path can be expressed as a parametric function q(u), where q refers to coordinates x, y, and z and u is a parameter to define the path from the initial position to the final position. To maintain zero oscillations when the picking and placing operations are performed, one intends to plan a path with zero oscillations at the initial and final positions of the path. Thus, the parameter u can be replaced by a quintic polynomial function of time:

with the boundary conditions as
By differentiating equation (14) with respect to time, the velocity and acceleration of any point on the path can be, respectively, obtained as

or

Note that equation (16) is used to determine the boundary conditions so as to solve equation (14) for the coefficients ai.
For the initial and final positions, substituting those boundary conditions into equation (15) leads
to zero velocities,
Tracking control
Position-based control
The position-based control converts a robot control problem to several motion control problems, and each motor is achieved by the position tracking control. Based on the aforementioned path planning, the desired coordinates of the end effector can be obtained, and then they can be used to determine the desired active joint angles by applying the inverse kinematics. A controller will be designed to achieve the tracking control of the active joint angles, which are generated from the motors mounted on the active joints, and the active joint angles are considered to be measurable using encoders. The active joint angles generated from the motors can be used to determine the coordinates of the end effector by applying the direct kinematics.
Actually, the entire control system is a semi-closed loop system, and only the dynamics
of the motors and the kinematics of the Delta robot are included in the system. Figure 3(a) shows the block diagram
of the control system, where Ei are the
voltages applied to the motors, and the subscript d refers
to reference signals. The first block is the path planning, which can generate the
desired trajectories of the end effector expressed as the coordinate functions of time,
(XP)
d
, (YP)
d
, and (ZP)
d
. The second block
is the inverse kinematics, which can convert the coordinates (XP)
d
, (YP)
d
, and
(ZP)
d
to the desired active joint angles (ϕ1i)
d
. The third block is a controller, which computes voltage signals
Ei of the motors based on the desired active
joint angles (ϕ1i)
d
and the measured joint
angles ϕ1i. The
last block is the direct kinematics, which can evaluates the actual coordinates Xp, Yp, and
Zp. Note that the third block consists of a
motor and a driver for an experimental work, and the block is modeled as a second-order
transfer function with a time delay, which is expressed as Block diagram of (a) a position-based control and (b) a model-based control.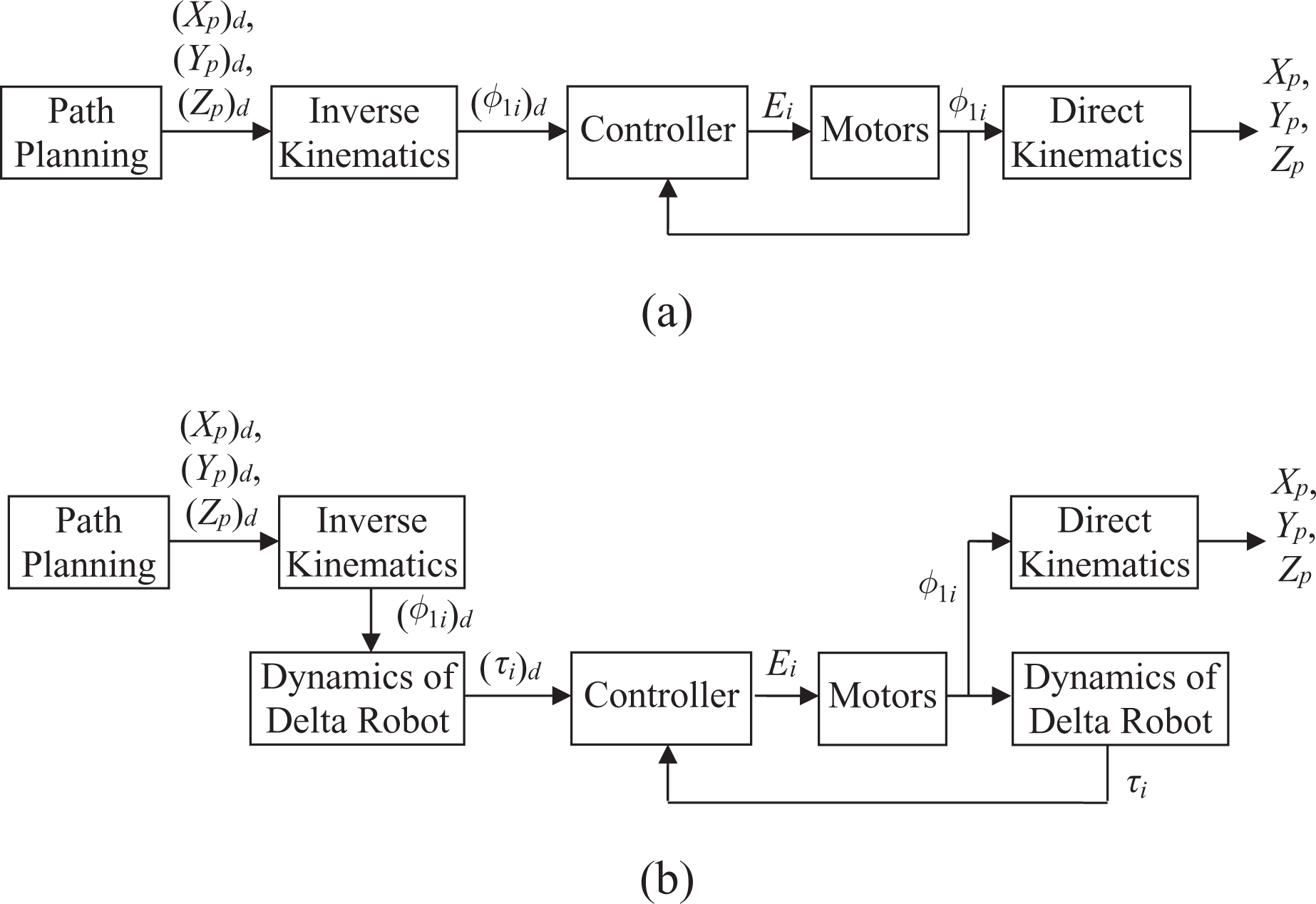

where Km is a gain, Tm1 is a time constant, and Tm2 is delay time. They are model parameters, which will be determined by applying the system identification to the block.
Model-based control
The aforementioned control system is broadly applied to various industrial robot
manipulators. It can be seen that the dynamics of the Delta robot is not included in the
control system, so the dynamic characteristics of the robot will not be shown in the
system. To keep the simplicity of the entire system without applying any additional
sensors and to incorporate the dynamics into the control system, a model-based loop
system is proposed as shown in Figure
3(b). To compare it with Figure 3(a), the proposed control system still uses the encoders to obtain the
active joint angles, and there are two additional blocks included in the block diagram,
which are the dynamics of the Delta robot. The block converts the desired coordinates
(XP)
d
, (YP)
d
, and (ZP)
d
to the desired
motor torques (τi)
d
based on equations (10)
to (13). Similarly,
the same block converts the actual coordinates Xp, Yp, and Zp to the actual motor torques τi based on the same equations. It is worth noting that a
central difference technique is used to calculate
Experimental setup
Experimental delta robot
An experimental Delta robot is designed and is manufactured as shown in Figure 4. The robot is composed of a
moving platform, a fixed base, and three kinematic chains. The moving platform is also
called the end effector, which is the member connected by three passive links as shown in
Figure 4. The fixed base is the
top plane, which is used to fix motors. The kinematic chain consists of an upper arm and a
lower arm, where the upper arm is a link connected by a motor, and the lower arm has four
links, which form four-bar mechanisms as shown in Figure 4. The three kinematic chains connect the
fixed base and the end effector. The actuators drive the three kinematic chains to yield
the motion of the end effector. The geometric parameters and the component masses of the
robot are shown in Table
1. An experimental Delta robot. Parameters of the experimental Delta robot.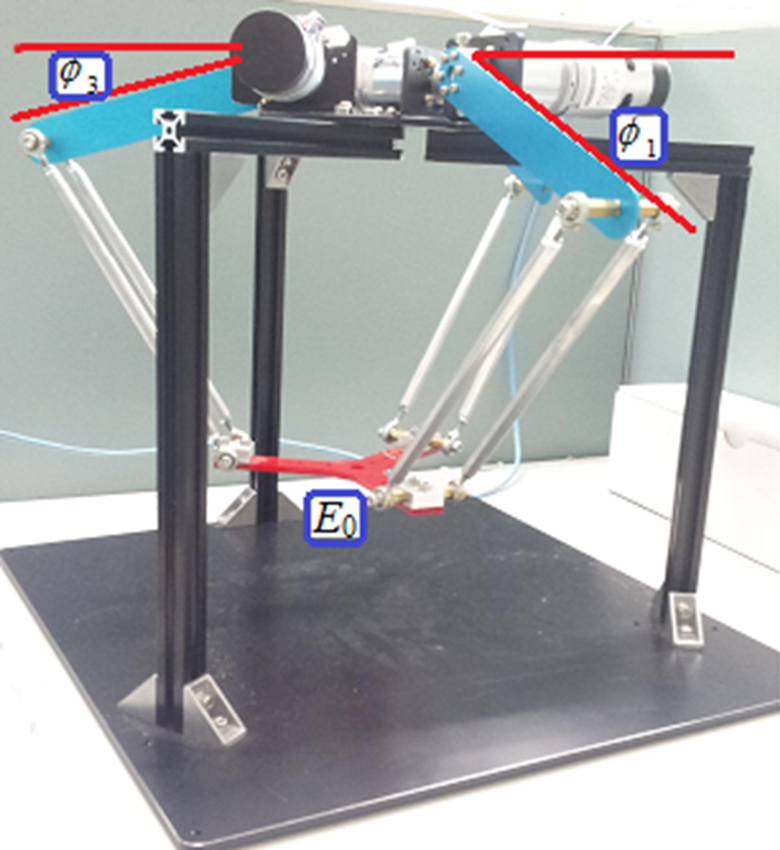

The actuators in the robot are DC brushed motors, and each upper arm is driven by a motor mounted on the fixed base. Thus, there are totally three motors on the robot. The type number of the motor is IG-42GM, manufactured by Sha Yang Ye, Inc, Taiwan. The motor also includes a set of planetary gears with the reduction ratio 1/49, which is used to reduce the rotating speed of the motor. According to the specifications provided by the manufacturer, the rated voltage, current, torque, and speed of the motor are 12 V, 5500 mA, 18 kg cm, and 119 r/min, respectively. Besides, each motor is attached by a rotary incremental encoder, which uses two Hall-effector sensors to measure the rotating angle of the motor. Since the motor can generate five pulses each round, the accuracy of the encoder can be evaluated as 0.367°.
Robot control system
The robot is driven by three motors, and each motor is controlled by a controller, which
generates a signal through a control law (e.g. PID controller) processing the encoder
signal. Thus, there are three motor controllers on the robot, and the entire robot control
system can be treated as a semi-closed-loop system as illustrated in Figure 5. A real-time embedded system CompactRIO, manufactured by National Instruments, Inc., USA is
used as a controller module in the robot control system. The embedded system has several
components as follows: An embedded processor for communication and signal processing (eRIO 9022), which is used to process all signals and to generate signals
to the motor drivers. Three servo motor driver modules (NI 9505), which are
full H-bridge brushed DC servo drive modules to directly connect the motors and to
decode the signals obtained from the encoders. A reconfigurable chassis housing the user-programmable FPGA (cRIO 9112), which is a base to connect the processor eRIO 9022 and the motor driver module NI 9505. A graphical software LabVIEW for real-time
programming, where the kinematics and dynamics of the robot are programmed through a
personal computer. A personal computer, which is used to execute the codes developed by the software
LabVIEW.

Hardware-in-the-loop diagram.
System identification
To design a controller for the motors, it is necessary to have a mathematical model of the motor, so the system identification will be performed to determine the motor model. Since the motor is driven by a motor driver, the motor and the drive are considered as a system, and the block diagram is shown in Figure 6. The transfer function of the system model is considered as a second-order system with a time delay, which is represented as equation (17). To perform system identification for the system, one generates multiple signals as input signals, which consist of sinusoidal functions with different frequencies and amplitudes. The signals are delivered to the system, and the rotating angles are the output signals and can be measured by the encoders. The system identification of the model is completed using the MATLAB System Identification Toolbox, and Table 2 shows the estimated system parameters.

Block diagram of a motor and a driver.
Parameters of the system model consisting of the driver and the motor.

Experimental and simulation results
This section demonstrates the tracking control using the proposed control approaches presented in “Model-based tracking control” section, where the reference signal of the control loop is a prescribed trajectory of the end effector. First, the PID controller will be used in the system control loop, where the controller parameters will be determined based on the motor models, which are identified in “System identification” section, using the Ziegler–Nichols tuning method and the software Simulink PID controller. Secondly, the numerical simulations will be performed. Thirdly, to demonstrate the proposed approaches presented in “Tracking control” section, the path planning is performed based on a quintic polynomial to design a trajectory for the end effector. Finally, the tracking control is completed based on the proposed control approaches and the path planning. The experimental and simulation results are presented, where the experimental work has been introduced in “Experimental Delta robot” section.
PID controller
The controller law applied to the Delta robot is a PID controller, and the procedure of
the controller parameters is illustrated as follows: A step function is selected as a reference command and is applied to the control
system for a single motor. The Ziegler–Nichols tuning method is applied to obtain a set of reference
parameters. The Ziegler–Nichols tuning method first performs an experiment to reach
the critical stability and then applies some empirical formula to obtain the
controller parameters. The obtained controller parameters are applied to numerical simulations of the
robot based on the identified motor models presented in “System identification”
section. The software, Simulink PID controller, is utilized to
fine-tune the parameter. Since the obtained controller parameters are based on a
single-motor experiment, its performance might not be suitable for the robot. The procedure is repeated in order to obtain the controller parameters for the
other two motors.
Since the input of the controller for the position- and torque-based control systems is different, the PID controller parameters are different, which are listed in Table 3.
PID controller parameters.

Numerical simulations
One utilizes the software Simulink to perform the numerical
simulations based on the block diagrams proposed in Figure 3, and the Simulink block diagram is shown in Figure 7. Note that the diagram includes both the
position- and torque-based control systems. The procedure to perform the simulations is
listed as follows: read all command motor angles, simultaneously perform both the position- and torque-based control, deliver the command and output motor angles to the PID controller, achieve the feedback control, and show the output motor angle signals.

Block diagram of performing numerical simulation through Simulink.
The simulation results are combined with the experimental results as shown in Figures 8 to 17.

Active joint angles (a) φ11, (b) φ12, and (c) φ13 by the position-based control.

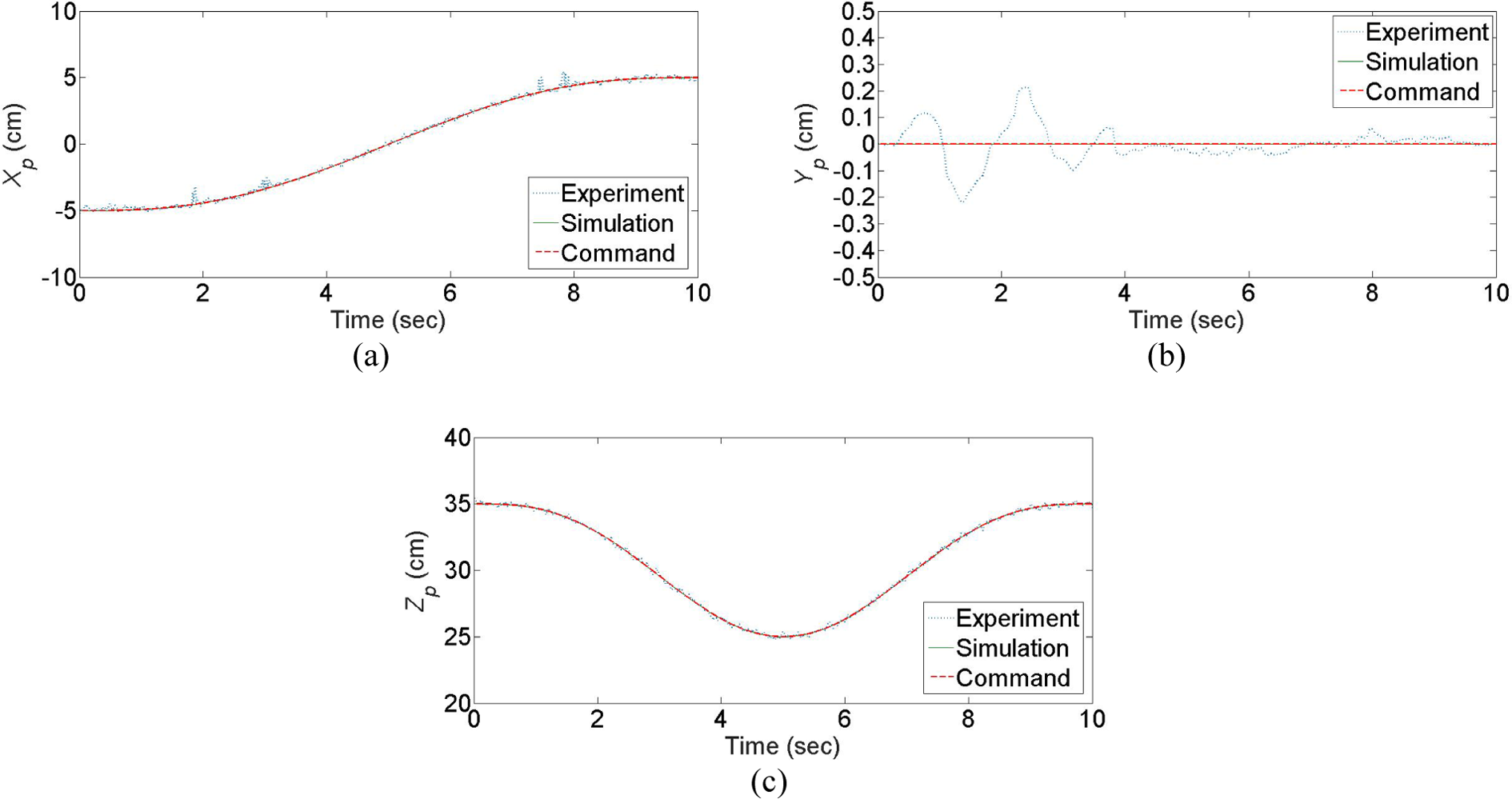
Coordinates of the end effector (a) Xp, (b) Yp, (c) and Zp by the position-based control.

Applied torques of (a) motor 1, (b) motor 2, and (c) motor 3 by the position-based control.

Velocities of the end effector (a) dXp/dt, (b) dYp/dt, and (c) dZp/dt by the position-based control.
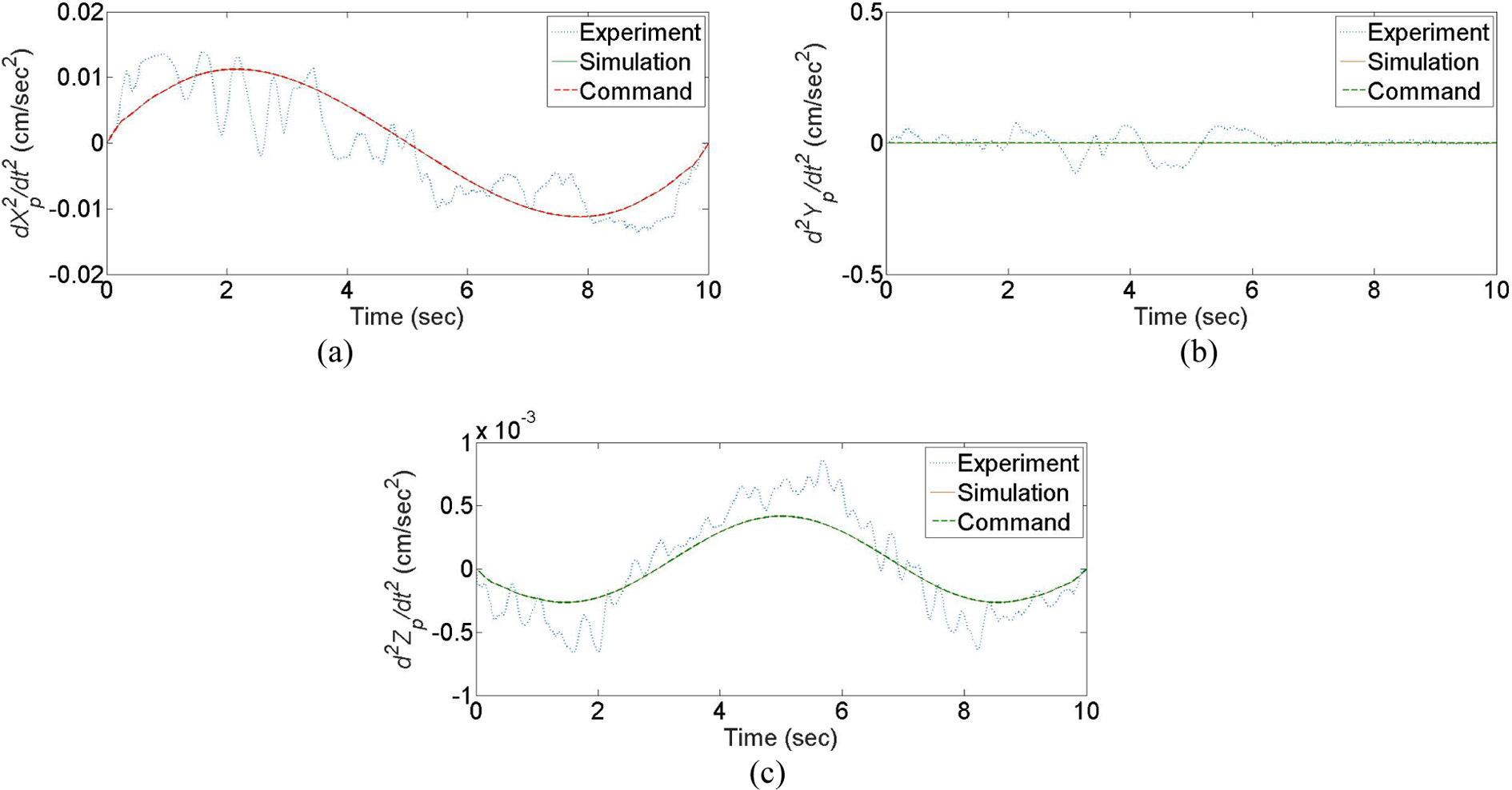
Accelerations of the end effector (a)

Active joint angles (a) φ11, (b) φ12, and (c) φ13 by the torque-based control.
Coordinates of the end effector (a) Xp, (b) Yp, (c) and Zp by the torque-based control.

Applied torques of (a) motor 1, (b) motor 2, and (c) motor 3 by the torque-based control.

Velocities of the end effector (a) dXp/dt, (b) dYp/dt, and (c) dZp/dt by the torque-based control.
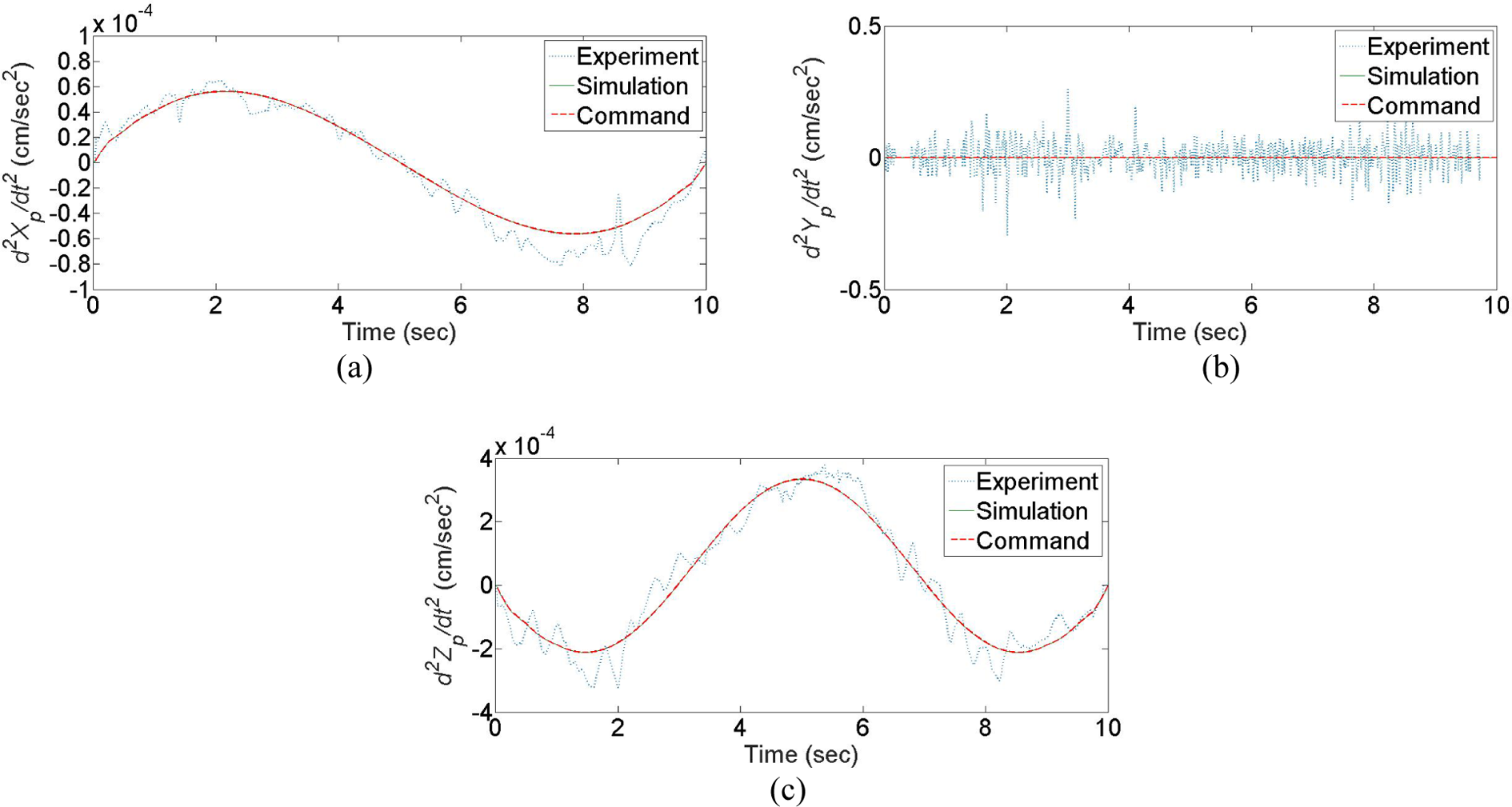
Accelerations of the end effector (a)
Path planning
In this section, one intends to mimic the pick-and-place task of the Delta robot. The
coordinates of the initial and final positions are selected as (X0, Y0, Z0) = (−5, 0, 35) and (Xf, Yf, Zf) = (5, 0, 35) cm, respectively. In addition, the
highest point is specified at (Xm, Ym, Zm) = (0,
0, 25) cm. Thus, these three points form a parabolic curve on the X–Z plane, which can be expressed as
Tacking control
Two control schemes, the position- and model-based controls, are applied to the Delta robot.
Position-based control
This subsection demonstrates the position-based control introduced in “Position-based control” section, and the control is applied to the Delta robot. Figure 8 shows the time responses of the active joint angles for the desired, simulation, and experimental trajectories. The results show that the simulation and desired trajectories are coincident, but the experimental trajectory is much different from them. There are some factors yielding the inaccuracy of the experimental results. First, the initial position might not be very accurate, because there are no additional sensors to ensure the initial position as desired. As observed, there are the errors about 2° at the initial position. Secondly, the dynamics of the Delta robot is not incorporated in the control system, so the inertial and gravitational effects must affect the positioning accuracy. Finally, the gearbox of the motor has backlash, and the accuracy of the encoders has only 0.367° based on the specifications of the encoders. This causes small oscillations during the entire trajectory. Thus, those factors produce the errors about 10° at the finial position. Figure 9 shows the time responses of the positions of the end effector for the desired, simulation, and experimental trajectories. The position of the end effector is obtained by performing the direct kinematics. Due to the errors of the active joint angles, the errors of the positions are around 2 cm. Figure 10 shows the time responses of the applied torques at the active joint angles. The applied torques are determined by applying the equations of the kinematics and dynamics. Similarly, there are some errors generated from the errors of the active joint angles.
To ensure the zero oscillations at the initial and final positions of the desired path, one applies the first-order central difference method to determine the velocities and accelerations of the end effector based on the positions. As expected, there will be some errors by applying the numerical method. Figures 11 and 12 show the time responses of the velocities and accelerations of the end effector. The results show that the initial and final velocities and the accelerations are zeros.
Model-based control
This subsection demonstrates the model-based control introduced in “Model-based control” section, and the control is also applied to the Delta robot. Figure 13 shows the time responses of the active joint angles for the desired, simulation, and experimental trajectories. The results show that the three trajectories are more coincident to compare with Figure 8. Figure 14 shows the time responses of the positions of the end effector for the desired, simulation, and experimental trajectories. The position of the end effector is obtained by performing the direct kinematics. The results also show that the three trajectories are more consistent to compare with Figure 9. This implies that the included dynamics in the control system can effectively reduce the positioning errors. Figure 15 shows the time responses of the applied torques at the active joint angles. The applied torques are determined by applying the equations of the kinematics and dynamics. Furthermore, Figures 16 and 17 show the time responses of the velocities and accelerations of the end effector. The results show that the initial and final velocities and the accelerations are zeros as expected.
Discussion
To show the performance of the model-based control scheme over the conventional position-based control scheme, this section demonstrates an example, which shows both the numerical and experimental results obtained by both schemes. The example mimics the pick-and-place task of a Delta robot by designing a quintic polynomial with zero velocities and accelerations at the starting and end points. The results by applying the position-based control show that the maximum errors of the active joints are around 10°. The errors also lead to the maximum positioning errors of the end effector with around 3 cm. In contrast, the model-based control has the maximum errors of the active joints and the end effector with around 3° and 0.5 cm, respectively. Since both the control schemes are applied to the same experimental equipment, one can deduce that the model-based control has a better positioning accuracy.
Conclusions
This article presents a simple model-based control scheme applied to a Delta robot, which has three translating DOFs and is driven by three rotating motors. Conventionally, the position-based control scheme is mostly applied to positioning control of robot manipulators. This control scheme converts the robot control problem to several separated motor control problems. The major disadvantage of the control scheme might not provide a good positioning accuracy due to the lack of the robot’s dynamics in this control loop. In literature, one of the model-based controls is the computed torque control, which computes applied torques based on the inverse dynamics of robots and the errors of joint angles as well as angular velocities. The proposed model-based control scheme also computes the applied torques based on both the kinematics and dynamics of robots, but the torques are utilized to calculate the errors between them and the desired torques, which is used to fulfill the feedback control. Thus, the proposed scheme is much simpler and can be treated as an indirect torque control without using torque and current sensors. This article demonstrates the simulation and experimental results by the mode-based control scheme, and the results are compared with those by the position-based control scheme. The results show that the model-based control scheme provides better positioning accuracy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.