
Abstract
The goal of this work is to develop a technology that can reduce recognition computational complexity with the rise of recognition quality. We use an approach based on implementation of the conjugation indices of the vectors with the class feature spaces. We suggest a new criterion of class separability based on the conjugation index and use it to form so-called support subspaces from the training vectors. This procedure decreases computing complexity at training stage about 1000 times in comparison with previous algorithm implementation and improves recognition quality. The most significant decrease of the computational complexity of the proposed technology is achieved by implementing the fractal compression to radar images. The results prove that using this technology leads to an increase of the recognition quality.
Keywords
Introduction
Unmanned aerial vehicle (UAV) is one of the most important and widely used class of robots. In the past few years, the radar devices placed on the UAV 1 –3 have been actively applied for image processing and analysis. Therefore, development of new methods for recognition of the radar observation data received with the UAV is a very important problem. The most promising and informative form of radar data representation is the Synthetic aperture radar (SAR) image.
Synthetic aperture techniques have many applications today in radar 4,5 and optics. 6 –8 First of all, synthetic aperture radar imaging methods allow to observe detailed information from satellites or airborne radars. The publicly released moving and stationary target acquisition and recognition (MSTAR) data set 9 has been studied widely in research of object recognition. 10,11 In this study, we developed and examined a new recognition method using the MSTAR data set.
Recognition and perception of SAR images is a challenging problem due to many factors. There are low resolution and low signal-to-noise ratio as described, for example, in the study by Antsiperov 12 for terahertz images. Moreover, feature extraction plays an important role in quality object recognition using SAR images. There have been many studies 13 –16 of effective feature extraction. In most cases, the feature extraction is used to reduce the feature space and therefore to increase the computation speed with rise of recognition quality. It is an advantage for real-time recognition in robotic systems.
In image analysis and pattern recognition, images are often represented as vectors whose components are the values of pixel brightness. This approach is widely used in computer vision, specifically for fractal image recognition. 17 In our research, we study the feature extraction approach based on fractal images. Fractal image recognition 18 is used in computer vision; for example, in 19 extracting intracellular fractal features, it has a good effect at the recognition stage.
Fractal image compression significantly reduces the memory which is required for storing the initial data with the same recognition quality. For example, fractal representation of an 128 × 128 initial image has the size of 16 × 16, so the feature vector is reduced by 64 times. It also has a positive impact on the speed of the training algorithm which has a high computation complexity.
There are various recognition methods, such as support vector machine (SVM), neural network, deep learning, sparse representation, and so on, but SVM is the one that is the most popular and widely applied. It is utilized in optical, multispectral, and other data classifications 20,21 and frequently shows a high recognition quality. However, the disadvantage of SVM is a problem in finding an appropriate kernel function. Another problem with the method is the support vectors are formed at the stage of those configurations as a result of solving the optimization problem, which often requires a large number of iterations and significant computational resources. This could be a reason that the SVM method is not widely used for recognition of fractal images. There are papers 22,23 which focus on the recognition of fractals images in the framework of the SVM approach.
The approach of fractal image recognition based on the properties of iterated function systems (IFSs) is described in the studies by Liu and Sun and Lasfar et al. 24,25 There are different implementations of this approach, but 26 the classifier is commonly built using the nearest-neighbor algorithm and, in Xiaoqing et al.’s 27 study, using the rate of convergence of the fractal image formation (the rate of convergence of the fractals formation). In the study by Pi and Li, 28 the fractal images are formed of the features which are obtained using a Gabor wavelet transform. In the study by Wang et al., 29 for fractal image comparison, a statistical method based on kernel density estimation is used. A set of statistical fractal signatures is used in the study by Li et al. 30
In this article, we propose an approach in which we combine the basic ideas of the fractal image recognition method with IFS and the support subspaces method (SSM), which we developed in the previous work. 31,32 In particular, the method of support planes was proposed by Zherdev and Fursov, 31 and it was extended into a multidimensional SSM described in the work of Fursov et al. 32 In the study by Fursov et al., 32 the support subspace construction algorithm shows better recognition results than other popular recognition methods. We performed the process of support subspace construction by searching all possible combinations of training matrix pairs. However, the exhaustive search requires a huge computational resource.
In the current study, we consider the problem of essential recognition quality decreasing and investigate two ways to solve this issue. Firstly, we reduce the computation complexity by performing the fractal image compression. Thus, we extract from an initial image the feature vector using fractal transformation. Secondly, we improve the method of support subspaces. Moreover, we introduce a new term about separability by the conjugation index and build a simple and effective algorithm to form the support subspaces.
The article is structured as follows: A general scheme of SAR images training and recognition is given in “General scheme of technology” section. Then, in “Localization and fractal compression” section, we describe procedures of the objects localization in SAR images and the fractal compression for forming feature vectors. Afterward, in “Method of recognition” section, we consider a decision-making rule which is based on usage of the conjugation index of the vectors with the class feature space. In “Construction of the support subspaces” section, we introduce a new criterion of class separability based on conjugation index and propose the support subspaces construction algorithm based on this concept. The computation effectiveness aspects of the training and recognition algorithm are given in “Orthogonal representation and computation aspect” section. Finally, we give the results of the experimental research that confirm the improvement of a quality and speed of recognition in “Experiments results” section.
Methods
General scheme of technology
In this study, we propose the recognition technology of the SAR images that expand the developed SSM. 32 As in previous work, we have three main stages of our technology: image preprocessing (with object localization), formation of the support subspaces (training stage), and recognition (testing stage). Moreover, in this work, we included a fractal compression stage which would have positive influence on the effectiveness of recognition quality and on the computation effectiveness of the training stage. The proposed technology scheme is provided in Figure 1.

The scheme of SAR images training and recognition.
In the following subsections, we will consider algorithms which are realized at these stages in more detail. In the specified task, we would shine a light on the following question: How does fractal compression affect the speed and quality of the recognition? All results in “Experiments results” section will be reviewed and then explained with more detailed information.
Localization and fractal compression
Usually, an unprocessed image contains a limited area of a recognizable object. If the area around the object is different for various registration episodes, that can lead to recognition errors. Therefore, it is necessary to cut the surrounding area as far as possible in all images (training and testing) before performing fractal compression. For this purpose, we apply the method of object localization in the SAR images, which we have described in the study by Fursov et al. 32 After that, we transform all processed images of objects with different aspects angles in fractal images.
We use the same fractal compression method as in the study by Minaev and Nikonorov. 17 The main idea of the IFS shape analysis algorithm is the following: An initial image is divided into square nonoverlapping parts named range blocks and into larger square parts named domain blocks. IFS has two main approaches to perform the shape analysis—compression and recognition algorithms. The compression IFS algorithm searches the best affine transformation from domain to range block for every range block. 18 As a result, an input image is coded by several affine transformations

where
We use eight different sets of parameters for fractal image transformation, which are as follows:
The transformation is conducted in a class of contraction mapping to obtain a unique and stable fractal image (the maximum of the transformation matrix eigenvalue is less than 1). Parameters of transformations c 1 to c 8 are computed with the use of IFS fractal compression algorithm: c 1 to c 4 are selected from the possible sets; c5 and c6 are calculated in the process of searching the best affine transformation from the domain block to the range block; and c7 and c8 are calculated on average brightness of the domain and range blocks.
The high-accuracy mapping and a large set of affine transformations can lead to bijection of the fractal and initial images. However, that operation involves expensive computation. In these conditions, we use rough regular dividing and a small set of transformations (see Figure 2). The described approach allows for fast coding of different sized images into corresponded fractal images and reduces the dimension of the input images. Let us emphasize once again that localization and fractal compression algorithms for the training and current images must be absolutely identical.

The scheme of image domain and range block partitioning.
Method of recognition
At a stage of training and recognition, an obtained fractal image is represented as a N × 1 (N = W × H, where W, H—size of an image) vector

where components are numerical values of pixel luminance. It is considered that there are M different fractal images for each K object. One class is formed via all vectors, which formed from the obtained fractal images of one object.
For each class, we have M training vectors, that is, for each

Matrix

Hereafter, this matrix is called as decision matrix.
Matrix

where

is a conjunction index of vector
Construction of the support subspaces
We notice that in the work of Fursov et al., 32 the support subspaces were formed by searching all possible pairs of training vector combinations within the recognition quality maximum criterion. In this section, we would propose a new effective method of the support subspaces construction that requires less computational resources.
Let us consider a case of the binary classification of the fractal images. We assume that a set of fractal images of two objects was transformed from the initial images. These obtained fractal images have some differences due to different iteration numbers and the influence of random noise, and so on. Our purpose is to create support subspaces for two classes, k and l. Those classes were represented as N × M-matrices
Next, we introduce the term separability by the conjugation index. It is determined that classes k and l are separable via the conjugation index if any vectors within these classes

the following conditions are satisfied


where
All feature vectors of both classes will be correctly recognized if the expressions (6), (7), and decision rule (5) are satisfied. Unfortunately, these expressions usually are not satisfied, but at the training stage, we plan to construct such subspaces which meet these conditions. Those subspaces will be called support subspaces.
There is a question of how it is possible to obtain the separable via the conjugation index support subspaces. In consideration of this question, we will construct a procedure as follows.
We suppose that in the N × M-matrices,

which satisfy the following criterion


It is evident that if conditions (6) and (7) are satisfied for these vectors, then these conditions are also satisfied for other vectors. Therefore, obtained support subspaces
In that manner, the algorithm of support subspace construction was organized as follows. Conditions (6) and (7) are checked if both or at least one of them are not satisfied, and then we exclude both vectors (or one of them) from the corresponding matrices
At the current stage of binary classification, we keep the separation of each pair of obtained support subspaces. Hereby, we can simply perform multiclass recognition. In this study, a current recognizable vector belongs to the class which has a higher ratio of vote in the one-to-one approach we used in the study by Fursov et al. 32
Orthogonal representation and computation aspect
In this section, we propose the conjunction index computation algorithm which is based on the
There are no changes if formula (3) for matrix

where


and can be rewritten as the series of equalities

Formula (10) can be rewritten by using equalities (11) such as

We will now consider a matrix

By analogy, the formula (13) can be rewritten by using equalities (12) as

It is possible to show that columns of matrices

where

and
It is evident that N × M multiplications for the calculation of a vector (17) and M multiplications for calculation of the conjugation index (18) are required. Thus, it is necessary to make the total of (N + 1)M multiplications. At the same time, for obtaining the conjugation index
At the same time, obtaining the conjugation index

where
However, it leads to an increase of the computational complexity at the learning stage. It is not a serious disadvantage as the training stage is executed once. For example, in mobile systems of computer vision, a fast response time usually is needed only at a recognition stage.
Experiments results
We used in our recognition experiments the MSTAR data set. In the study by Fursov et al. 32 (see Table 1), we gave the detailed information about this data set. As in the study by Fursov et al., 32 we composed the training and testing sets using the SAR images with the angles of depression equal to 17° and 15°, respectively. For each initial image, it was a localized object area and obtained a fractal image using the methods described above.
Binary recognition results.

The boldface numbers represents results of recognition probability of proposed in article method. PSNR: Peak signal-to-noise ratio.
Figure 3 shows the effectiveness of fractal compression methods using an ROC diagram. In the formed diagram, we used the results of BMP2 and T72 binary recognition. The minimum and maximum values of the difference between conjugation indices were −1 and 1. It is evident that the recognition quality was raised because of using fractal images in forming feature vectors.

ROC diagram of BMP2 and T72 binary recognition results. ROC: receiver operating characteristic.
As was discussed above, firstly, we concerned the binary recognition of BMP2 and T72. We excluded vectors that meet the conditions (8) and (9) from constructed matrices
The next experiment was carried out for estimating the computational complexity that is required by the algorithm of the support subspace. Figure 4 showed the graph of value O tr, which depends on the dimension of subspace. O tr is a relation of O tr1 operation numbers which are necessary at implementation of the algorithm in work 32 to O tr1 operation numbers of the current method described in “Construction of the support subspaces” section implementation: O tr = O tr1/O tr2. We can see from the graph that the current method overtops the previous method for all subspace dimensions from 2 to 12 higher by 1000 times. At the same time, the maximum has reached the dimension of seven vectors in subspace.

Dependence of O tr on subspace dimension.
Figure 5 shows the dependence of size of feature vectors and relation O te = O te1/O te2 of operation numbers O te1 for implementation of the recognition algorithm described in the study by Fursov et al. 32 to operation numbers O te2 for implantation of the current method described above. We used the next range areas, which are as follows: 8 × 8, 16 × 16, and 32 × 32.

Dependence of O te on feature vector sizes.
Figure 6 shows the estimate of recognition probability (p) for experiments in a case of a binary recognition dependence on a number of range areas (R). We used range areas of size 16 (4 × 4), 64 (8 × 8), 256 (16 × 16), 1024 (32 × 32), and 4096 (64 × 64). In the following experiments, we implemented the range areas of size 1024, guided by the obtained results of computational complexity.

Dependence of recognition accuracy of the number of range areas.
Table 1 shows the detailed results of a binary recognition experiment of BMP2 and T72 objects with 32 × 32 range areas. Figure 7 presents initial data set and fractal compressed images of these objects. PSNR is a well-known peak signal-to-noise ratio. There are pSVM, p0, and pon recognition quality of SVM, Conjugation Index Method, 32 and SSM accordingly. Recognition quality was obtained using a full matrix of class (3), and non is a number of remained vectors in the constructed support subspace.

Images of BMP2, T72 accordingly: (a) and (b) initial; (c) and (d) fractal compressed.
It is clear to see that a significant decrease of the vector numbers by 21–48% leads to improvement of the recognition quality by 1–3% (look into the bold columns). Thus, the SSM showed better quality than SVM.
Table 2 gives the second experiment results. The training and testing images were noised by Rayleigh distribution with σ = 5, 10, and 15. Rayleigh distribution in most cases represents the clutter effect which is a case of a coherent SAR imaging system.
Recognition results with Rayleigh noise.

The third experiment shows the multiclass recognition results for three objects: BMP, BTR70, T72; and five objects: BRDM2, 2S1, BTR60, T62, and ZIL131 from data set MSTAR. Table 3 presents the results of recognition with the construction of support subspaces as discussed above. In this experiment, we provided the separability of classes by the conjugation index.
Confusion matrix of SSM.

Boldface numbers show the value of current model correct recognition. SSM: support subspaces method.
Moreover, we tested the proposed recognition approach on five specified above objects. The results of correct recognition are shown in Table 4. In the current stage of development, the recognition approach presents rather satisfactory results.
Confusion matrix of SSM, four class.
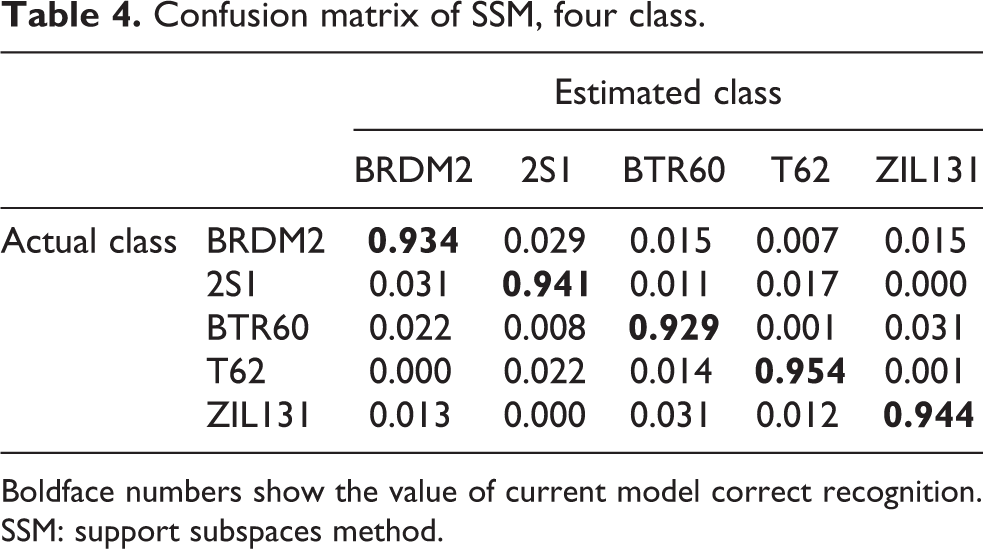
Boldface numbers show the value of current model correct recognition. SSM: support subspaces method.
Finally, it is shown that construction of support subspaces leads to an increase of recognition quality with a significant reduction of the feature vectors’ size. The obtained results should be analyzed in detail. In Table 3, it is shown that the described method achieved a similar rate of the correct recognition (97.9 %) to that of the method proposed by Fursov et al. 32 (97.8%). The advantage of the proposed method of class separability is in its high computational efficiency which was demonstrated in Figures 4 and 5. The method shows good stability to different kinds of additional noise which was shown in Tables 1 and 2. The higher stability of recognition algorithm was obtained in the experiment with additional Rayleigh noise that certainly is an advantage of SAR automatic target recognition systems. In addition, proposed method of support subspace construction based on conjugation indices can be used in recognition of different kinds of data such as the visual–tactile data 34 or the data from multimodal sensors. 35
Conclusion
In this study, we have examined the improved SSM and showed its efficiency for SAR images recognition. In particular, we have shown that it can reduce computing complexity without loss of recognition quality through preliminary fractal compression of images. The estimates of recognition probability with range areas 1024 (32 × 32) amounted to 0.982 for binary recognition and 0.979 in case of three classes recognition. At the same time, computation complexity for learning in comparison with the algorithm from the work of Fursov et al. 32 is more than 1000 times smaller. With an increase of noise intensity, the quality of recognition, as expected, decreases. Nevertheless, it remains high as compared to the SVM method. The proposed method in this article for forming the support subspace provides additional increasing of recognition quality by 1–3%. We notice that in contrast to the SVM, we simplified the procedure of multiclass recognition. This technique can be used for real-time recognition in robotic systems in both optical and radar images.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Ministry of Education and Science of Russian Federation.