
Abstract
In order to assess the performance of multisensor image registration algorithms that are used in the multirobot information fusion, we propose a model based on structural similarity whose name is vision registration assessment model. First of all, this article introduces a new image concept named superimposed image for testing subjective and objective assessment methods. Therefore, we assess the superimposed image but not the registered image, which is different from previous image registration assessment methods that usually use reference and sensed images. Then, we calculate eight assessment indicators from different aspects for superimposed images. After that, vision registration assessment model fuses the eight indicators using canonical correlation analysis, which is used for evaluating the quality of an image registration results in different aspects. Finally, three kinds of images which include optical images, infrared images, and SAR images are used to test vision registration assessment model. After evaluating three state-of-the-art image registration methods, experiments indict that the proposed structural similarity-motivated model achieved almost same evaluation results with that of the human object with the consistency rate of 98.3%, which shows that vision registration assessment model is efficient and robust for evaluating multisensor image registration algorithms. Moreover, vision registration assessment model is independent of the emotional factors and outside environment, which is different from the human.
Keywords
Introduction
By connecting different robots that are integrated kinds of sensors respectively in a team can perform a better job than each individual is capable of. 1,2 In order to improve the abilities of multirobot systems, information fusion is a necessary task to suppress the noise in a multiagent environment. 3 Finding a way to most effectively utilize the information captured from these multiple sensors, possibly of different modalities, is of considerable interest. Image fusion provides one versatile solution, where multiple aligned images acquired by different sensors are merged into a composite image. The properly registered image is more informative than any of the individual input images and can thus better interpret the scene. 4,5 Consequently, an accurate multisensor registration is a key procedure that is to transform information provided by different sensors with multiple spatial and spectral resolutions into the same coordinate model for image fusion. 6 –8 To date, the surveys on image registration methods can be found in literatures. 9 –13 Additionally, Pomerleau and Colas made a review on point cloud registration algorithms for mobile robotics. 14 Moreover, multisenor image registration is also important for Simultaneous Localization And Mapping (SLAM) which is the core of the robot self-localization. 15 –18
In order to achieve the multisensor image registration for different types of images that include visible light images, infrared images, and synthetic aperture radar (SAR) images, multisource sensor image registration quality evaluation methods must be able to solve the problem of image diversity. 19 On the other hand, due to the diversity and complexity of the image scene, the evaluation method is necessary to have a wide range of applicability, which can handle a variety of complex situations. This is one of the problems in the field of image registration quality evaluation-universal applicability, 20 which poses a very high requirement for the performance of image registration quality evaluation methods.
In the study of image registration, scholars mainly focus on the registration algorithm itself. The evaluation of image registration results has not been attracted much attention. Therefore, it is necessary to study the assessment model of the image registration algorithm. Through the study of the image registration quality evaluation algorithms, it is found that the evaluation methods that are commonly used are just applied for one or several kinds of specific scenarios in image registration. 21 –23
At present, some researchers have done a lot of work in the image registration quality evaluation. They proposed some image registration evaluation criteria for different fields. Bouchiha and Besbes utilized the recall which was based on the number of interest points properly matched and the number of actually existing matches for comparing the remote sensing image registration performance of four different features (Scale-invariant feature transform [SIFT], Gradient location-orientation histogram [GLOH], Speeded Up Robust Features [SURF] and Open-Speeded Up Robust Features [O-SURF]). 24 Thor and his colleagues proposed a quantitative measure which included a contour similarity measure which was the Dice’s similarity coefficient (DSC) for the deformable medical image registration quality evaluation. 25 Bharatha and his coauthors used the feature matching rate and DSC for evaluating the three-dimensional finite element-based deformable magnetic resonance image registration. 26 Liu and his collegues used the kernel sparse coding for object recognition. 27 However, those evaluation methods focused on the certain areas and were less robust in complex conditions of multisensor image registration algorithms.
Inspired by the human vision system (HVS)and the existing image registration quality evaluation criteria, 28,29 we built a quality assessment model of image registration with wide applicability and human visual characteristics. Experimental results have shown that the proposed evaluation model is robust to the local distortion. Additionally, our model can be used for evaluating registration algorithms which are used in a variety of application scenarios.
This article is organized as follows. In section “Related work,” we present several related works of subjective and objective evaluation methods. In “Image registration assessment model based on SSIM” section, we describe the proposed algorithm and its improvement by fusing eight indicators. In “Experimental results and analysis” section, we show the numerical simulations of comparing the evaluation results between our proposed model and HVS. It is noted that three states-of-art image registration algorithms are introduced to register the multisensor images. Finally, conclusions and suggestions for further work are summarized in section “Conclusion and future work.”
Related work
According to our previous research, image registration quality evaluation is generally divided into two types: (1) subjective evaluation methods, which depend on the human eyes to observe the images and make choices of registered image quality according to the options provided; (2) objective evaluation method, which depends on the related mathematical model to compute the mean value, variance, or gradient of an image.
Subjective assessment
The subjective image registration assessment methods based on HVS are fast and simple. 30 However, the disadvantages of those methods are one sided and poor reproducible, because the quality of the image registration result is mainly determined by the observer. 31 Moreover, when the observer is affected by the psychological changes and observation environment, it will lead to the difference of the evaluation results and reduce the accuracy of the evaluation results. 32 Therefore, the objective evaluation method has been developed, which results in a large number of objective evaluation model being proposed.
Objective assessment
The objective assessment algorithms of image registration can be divided into two categories: (1) direct assessment method and (2) indirect assessment method. Christensen and Crum proposed a method based on inverse consistency error (ICE) for assessing the quality of image registration. 33,34 However, ICE will fail in evaluating the image registration methods when the images’ background is flat. In image registration, it is generally assumed that the cross-correlation mapping between the reference image and the image to be registered is one-to-one. In other words, any point in the sensed image s(x, y) can only establish one mapping relationship with the unique point in the reference image r(x, y). However, in practical applications, the mapping T sr obtained from the registration of s(x, y) to r(x, y) and the mapping T rs obtained from the registration of r(x, y) to s(x, y) is not reversible. 35 Hardcastle and his colleagues proposed a new method that was used to evaluate the pros and cons of transitive attributes and make a statistic analyzation of the image registration results. 36 When two transformations are merged into one transformation, the transitive attribute is very important for minimizing non-uniformity errors. Ideally, the transitive transformation means that the correlation among the three different images t1, t2, and t3 should be able to correctly map any point from t1 to t2, then from t2 to t3, and finally map the point from t3 to t1, while the geometric position of the point does not change. t1, t2, and t3 is the reference image, the sensed image, and the registered image, respectively. The error between the identity mapping transformations of the three images is defined as a set of transitivity error (TE) of transformations in the work done by Hardcastle et al. 37 Christensen and Johnson used TE to evaluate their non-rigid image registration. 38 However, new errors are introduced during evaluating the image registration method using TE. Moreover, some other researchers usually utilized the evaluation method based on root mean square error (RMSE) for measuring the degree of discrepancy between the registered image and the reference image. 39,40 Rui and his colleagues proposed a robust matching method using shape matching for the multisensor imagery. Moreover, they used RMSE and standard deviation to assessment their proposed registration method. 41 Besides, RMSE is also usually used to evaluate the registration results. Kumar and his coauthors used RMSE to evaluate their proposed methods. 42 The smaller the RMSE is, the performance of the image registration algorithm is better than others. Additionally, information entropy is a quantitative measure of the information transmitted by the image, which is useful to evaluate the image registration methods. 43 Tsai and his collogues used the difference of entropy information (DEn) to assessment their proposed algorithm. 44 However, this method is limited in evaluating medical images. Therefore, Melbourne and his coauthors used the image structural (ST) contrast to evaluate the image registration results. 45 However, ST is just useful in nonlinear image registration algorithms.
However, the objective image registration quality assessment algorithms that are currently used cannot meet the above two requirements, which are difficult to match the assessment results based on the human eyes. Inspired by the image quality evaluation criterion based on structural similarity (SSIM), we proposed a new robust assessment model that combines the advantages of subjective and objective evaluation methods for multisensor image registration algorithms.
Image registration assessment model based on SSIM
Multisensor image registration is installed for different types of images that include optical images, infrared images, and SAR images. Therefore, the objective assessment method of the multisensor image registration methods must be able to solve the problem of image diversity. On the other hand, due to the diversity and complexity of the image scenes, it is inevitable that the image registration assessment method must have a wide range of applicability and can handle a variety of complex situations.
It is noted that our assessment model proposed is inspired by structural similarity model, which is approximate to the processing of human eyes. With the development of the HVS research, Wang and his coauthors proposed an image quality evaluation criterion based on structural similarity. 43 They believe that the image structure information is independent of the brightness and contrast characteristics, so the evaluation of image quality can be approximated as the image structure similarity, brightness, and contrast evaluation. 39 In other words, this method directly evaluates the image quality by calculating the similarity of image structures, which can overcome the complex image scene and the difficulty of multichannel decorrelation. Moreover, according to our previous research and analysis, we introduced eight evaluation factors to be parameters of our proposed model, which assessments the performance of image registration methods in different aspects. Then, vision registration assessment model (V-RAM) can give the readers a reasonable and robust assessment result.
The SSIM model presented by Wang et al. describes the relationship among the correlation contrast c(r, s), brightness l(r, s), and structure a(r, s). 46 The relationship among the three elements is shown as follows

where

where r and s are two images with a certain correlation, whose gray scale means are μr, μs , and variances are σ r and σ s , respectively. At the same time, in order to ensure the stability of the brightness, contrast, and correlation coefficient, and guarantee the denominator of the function to be non-zero, the corresponding minimum values C1, C2, and C3 are introduced. Besides, α > 0, β > 0, and γ > 0.
Superimposed image
Generally, the reference image r(x, y) and the registered image g(x, y) are used in the image registration evaluation. 47 –49 However, the proposed assessment model in this article just evaluates the superimposed image SI(x, y) which is defined as follows

where rext(x, y) is an external image of the reference image r(x, y) and gext(x, y) is an external image of the reference image g(x, y). M′ is the number of rows of the external image and N′ is the number of columns of the external image. In our manuscript, M′ and N′ are determined by the following formula

where M and N are the width and height of the reference image and κ is the weight. In order to include all of the overlapping regions, we make κ > 1.5.
SSIM-motivated registration assessment model
In our model, some previous indicators are introduced. In the first place, the function of this model is shown as follows

According to equation
(3), we can see that there are eight indicators in V-RAM. According to the
relationship between V-RAM and the registration algorithm, those indicators can be divided
into two categories: (1) the indicator class


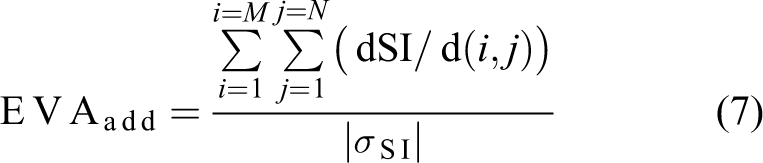
where ROgr is the relative overlap region between r(x, y) and g(x, y) and EVAadd is the image definition of the superimposed image SI(x, y). 50 STgr is the structural contrast between r(x, y) and g(x, y), NRMSErg is the normalized RMSE between r(x, y) and g(x, y), TEg is the TE of g(x, y), ICEg is the consistency inverse error of g(x, y), DEnrg is the entropy of the difference image of the overlap region that locates in r(x, y) and g(x, y), and T rg is the running time of the image registration method. The functions of the eight indicators are shown as follows

where W × H is the size of the relative overlap region
where

where C gr is the covariance of r(x, y) and g(x, y)

where σ g and σ r is the variance of reference r(x, y) and g(x, y), respectively

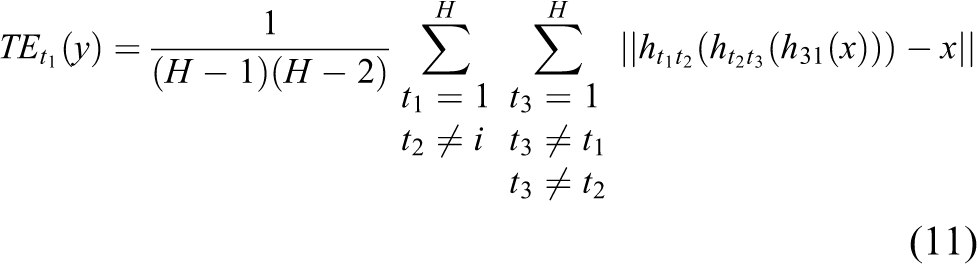
where t1 denotes the reference image, t2 denotes the sensed image, and t3 denotes the registered image. H denotes the number of test images that are used for evaluating the performance of the algorithm and || • || is the standard Euclidean norm

where ImgN is the number of the test images, hji
(p) is the mapping function between
r(x, y) and
g(x, y), and

where P(i, j) is the probability of the superimposed image SI(x, y).
It is noticed that we assume that

where g is the registered image, r is the reference
image, s is the sensed image, SI is the superimposed image, the vector
Weight acquisition
In order to determine the values of

where


C11 is the covariance of


The weights of each indicator is obtained by calculating equation (15)


where i = 1, 2, 3 ..., r, r =
rank(C12) that is the number of typical projection vectors.
μ and ν are unit orthogonal eigenvectors. In our
experiment, the weights of


Flowchart of our proposed algorithm
The outlines of our algorithm are shown as follows: Before evaluating the image registration result, the input image of V-RAM is
necessary to be preprocessed. One of the key steps in this preprocessing stage is to
obtain the image overlay, which evaluates the region region of interest (ROI) of the
overlay image. It is known that the difference of the gray level between the
heterologous images is very large. If we calculate the evaluation index of
r(x, y) and
g(x, y) directly, it will cause
a large error. However, we can eliminate this difference based on equation
(14). Moreover, the evaluation accuracy of V-RAM model can be improved using
the superimposed image SI(x, y). When evaluating the performance of the color image registration, it is necessary to
decompose the image into different channel for assessment. After the above two-step processing, the evaluation indicators of each channel are
calculated. According to the application scenario of image registration algorithms, we obtain
the results of image registration evaluation results based on the V-RAM model.
Experimental results and analysis
Materials
In our experiment, a database for image registration was created by our lab. The database has 1200 images that include optical images, infrared images (includes near-infrared images with wavelengths of 780 to 3000 nm), and SAR images. Moreover, in order to test the V-RAM model for multisensor registration algorithms, we divided the database into 20 groups based on scenarios, which are described by {D1, D2, ..., D18, D19, D20}. It is noted that the resolutions of each image in our database are 800 × 800 pixels and 1024 × 800 pixels, respectively. An example of our database is shown in Figure 1.
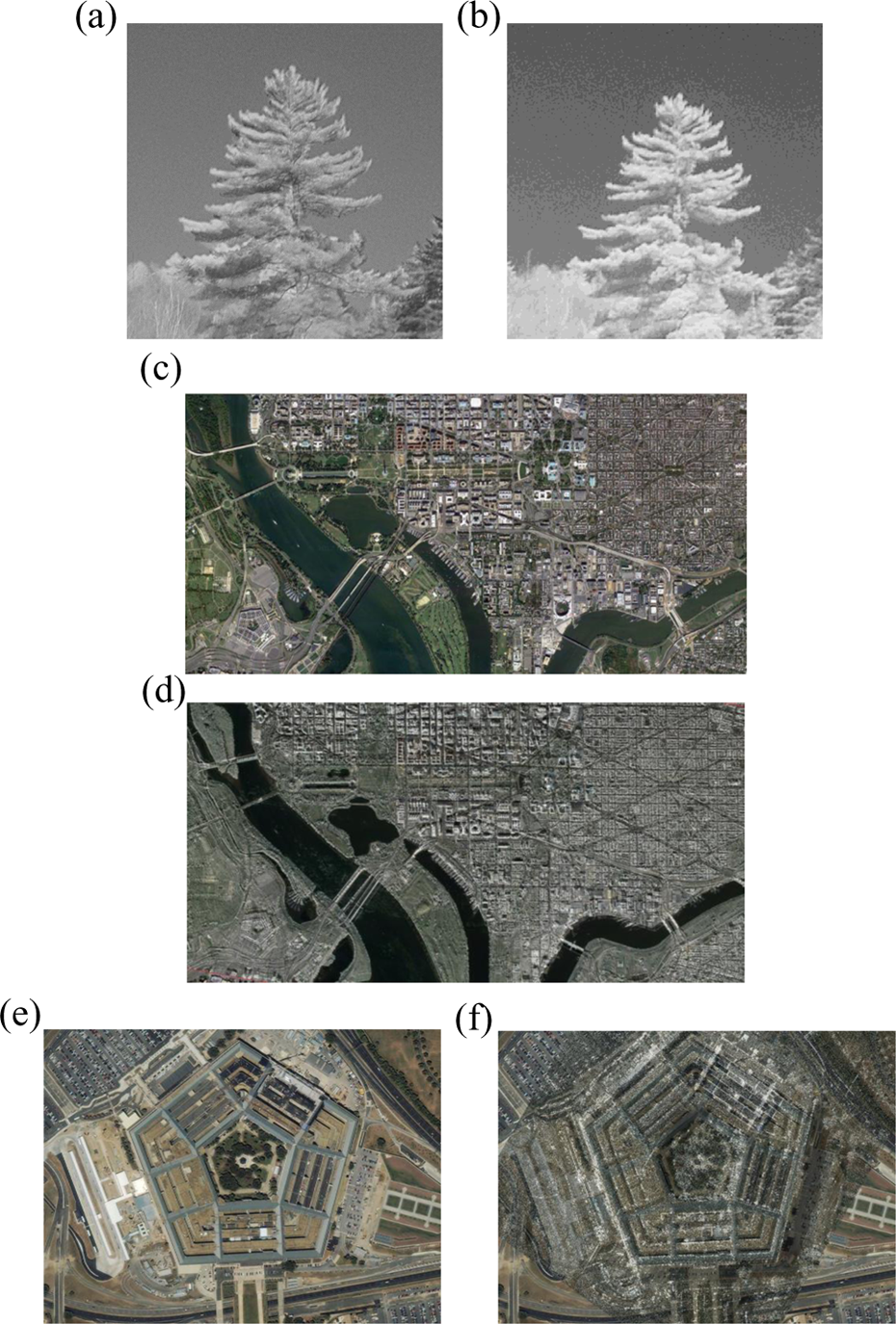
Example images of D1. (a) An optical image of a tree. (b) An infrared image of a tree. (c) An optical image of a city. (d) An SAR image of a city. (e) An optical image of the Pentagon. (f) An optical image of the Pentagon.
Three registration algorithms are selected for testing our assessment model. The three algorithm is Scale invariable-Features from accelerated segment test (SI-FAST), 52 Fast Fourier-Mellin Transform (FAST-FMT), 40 and Difference of Gaussian-Local Binary Patterns (DOG-LBP). 31
Objective evaluation results and analysis of image registration quality
The images in {D1, D2, ... m, D18, D19, D20} are registered using SI-FAST, FAST-FMT, and DoG-LBP. Then, we evaluate the image registration quality by V-RAM. In this article, we proposed the distribution of eight evaluation indicators for each registration algorithm. Additionally, all the eight evaluation indicators are normalized for comparing SI-FAST, FAST-FMT, and DoG-LBP.
After obtaining the registration results, we tested the superimposed images based on combing the reference image and the registered image. In order to test the subjective assessment method, 30 students in our lab were chosen to evaluate the multisensor image registration results by their eyes. Those students spent 1 week to complete the performance assessment of image registration algorithms. It is noted that the subjective results are also used to be as the ground-truth for comparing the objective results which are calculated by V-RAM model. The subjective evaluation results are shown in Figure 2.

The superimposed image and their zoom-in regions. (a) SI-FAST, (b) FAST-FMT, (c) DoG-LBP.
In order to get the subjective results, each student is required to observe the superimposed images, then he/she gives a score for each superimposed image. As we know, 1200 images are registered by the three registration algorithms, so the number of superimposed images is 3600. Moreover, 30 students were asked to watch and score the superimposed images, which caused the number of subjective evaluation results was 10,800. However, due to the limited space, all the scores for each superimposed image are not shown in Figure 3, while we just show the mean score of the observation of all the superimposed images from each student. The interval of the score is 0 to 10.

The subjective results based on human eyes.
According to Figure 3, we can find that the subjective evolution results based on human eyes are different with each other when the students watched the superimposed images. These results imply that the subjective assessment method is easy to be affected by the emotional factor. Moreover, the subjective assessment method is necessary for evaluating the multisensor image registration algorithms.
Objective evaluation for multisensor image registration algorithms
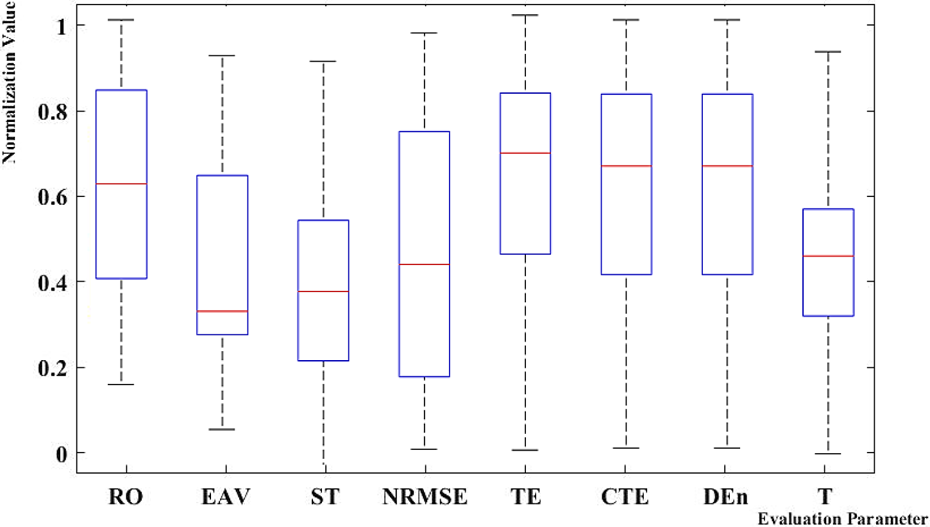
In this section, we firstly analyze the effect of three registration algorithms that has been introduced in this article on the eight indicators of V-RAM model. The objective evaluation results of FAST-FMT, SI-FAST, and DoG-LBP are shown in Figures 4 to 6, respectively. It is noted that the results of V-RAM are described by box plot that can provide a visualization of summary statistics for sample data.
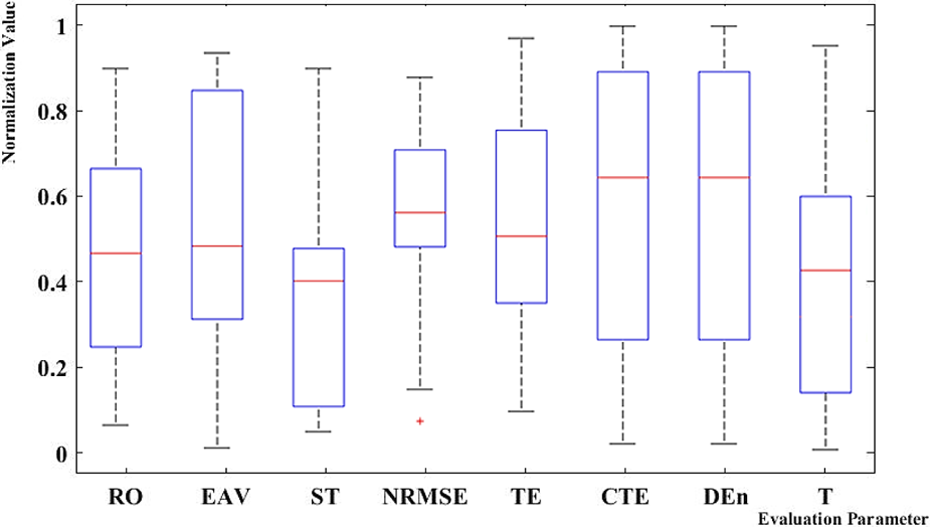
The evaluation result for Fast-FMT based on the V-RAM model. V-RAM: vision registration assessment model.

The evaluation result for SI-FAST based on the V-RAM model. V-RAM: vision registration assessment model.
The evaluation result for Histogram of Oriented Gradient-Local Binary Patterns (HOG-LBP) based on the V-RAM model. V-RAM: vision registration assessment model.
From Figure 4, we can find
that: The means of ROgr, EVAadd, STgr,
NRMSErg, TEg, ICEg, DEnrg, and
T
rg
are 0.46, 0.48, 0.39, 0.56, 0.48, 0.62, 0.62, and 0.42, respectively. The length of the box of DEngr
is longer than that of other indicators, which indicates that this
indicator is affected by the scene of the image itself heavily. The red marker “+” in the corresponding box diagram of NRMSErg indicates
that there is an abnormality in the data of the registration result, which is due to
a mismatch of the image features. However, there is no data abnormality in the boxes
of other indicators. Therefore, we consider that the NRMSErg of V-RAM
model is sensitive to the accuracy of registration results.
According to the Figure 5, we can find that:
The means of ROgr, EVAadd, STgr, NRMSErg, TEg, ICEg, DEnrg, and T rg are 0.54, 0.42, 0.43, 0.45, 0.59, 0. 52, 0.53, and 0.58, respectively.
The box length of TEg is longer than the box length of other indicators, which indicates that this indicator is affected by the scene where the image is taken.
As can be seen from Figure
6: The means of ROgr, EVAadd, STgr,
NRMSErg, TEg, ICEg, DEnrg, and
T
rg
are 0.62, 0.59, 0.50, 0.42, 0. 52, 0.50, 0.52, and 0.49, respectively. The box length of NRMSErg is longer than the box length of other
indicators, which indicates that NRMSErg is affected by the scene where
the image is taken.
Comparison result of the objective observation and subjective calculation
In order to evaluate the performance of our proposed V-RAM model, we compare the subjective and objective assessment results of the same superimposed image. As we know, there are 10,800 evaluation results of all the superimposed images. However, due to the space limitation, we just showed the 30 of the evaluation results, which is shown in Figure 7.

V-RAM comparison results. (It is noted that the vertical axis is not the score of the image registration assessment.) V-RAM: vision registration assessment model.
In this article, we focus on the performance of our proposed assessment model not the
registration algorithms. In other words, we just compare the objective results of the
three image registration algorithm based on the V-RAM model to the subjective results
obtained by human eyes. Therefore, we utilized the charts to show the changes of the
assessment results between the subjective and the objective evaluation method. According
to Figure 7, we can come to two
conclusions that are shown as follows: For the same image registration algorithm, the objective result is approximate to
the subjective result for the same superimposed image. Moreover, the trend of the
objective results is same with that of the subjective results. For the same scene, the objective result is the same with the subjective result for
the superimposed images acquired using different registration methods. Taking the
ninth results obtained by the three different registration methods as an example, we
can find that the V-RAM model-based registration assessment result acquired by
DoG-LBP is the best one, which is the same with the result based on human eyes.
Figure 8 displays that our proposed model can obtain an assessment result that is more approximate to the result human eyes than that of each parameter. It also indicates that single assessment parameter cannot obtain an exhaustive evaluation result for the multisensor image registration method, which means that our proposed model can achieve an objective and exhaustive assessment.

V-RAM comparison results among different existing assessment methods. V-RAM: vision registration assessment model.
Based on the above results, we found that our proposed V-RAM model achieved the same registration assessment performance with the human vision system. Although the assessment scores are different with the scores obtained by a human, the V-RAM model can give the same conclusion with the human vision system when we compare different registration algorithms.
Conclusion and future work
In order to improve the performance of the multirobot information fusion system, we proposed an SSIM-based assessment model V-RAM for the multisensor image registration algorithms, which was motivated by the human vision system. Two contributions are given by the V-RAM: (a) in order to evaluate the quality of image registration, V-RAM evaluated the registration results from eight aspects, and (b) we introduced superimposed image for building our test database that was utilized to test the subjective image registration assessment method and the V-RAM model. Experimental results implied that our proposed assessment model can obtain approximate evaluation results to the human eyes but is not effected by emotional factors like human beings, which proved that our model was robust and efficient for assessing the multisensor image registration algorithms. In our future work, we will introduce the deep learning method to search the ideal weights of the V-RAM model.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project sponsored by the National Natural Science Foundation of China (no. 61401040) and the National Key Research and Development Program (no. 2016YFB0502002).