
Abstract
The hybrid force position control algorithm based on neural network is considered for a class of robot system with nonlinear uncertainties. Compared with previous work, not only the steady-state performance but also the transient-state performance is considered. Firstly, in order to relax the control design dependent on detailed system information, a fast hybrid position/virtual-force controller is presented to build a virtual-force field between the obstacles and robot. The virtual force is the control parameter, which is set to maintain an expected distance between obstacles and the robot with unknown nonlinear and parameter uncertainty. Secondly, in order to alleviate the computation burden of parameter learning, and enhance the dynamic mapping of network ability, the Elman neural network is introduced. The output signal come from hybrid position/virtual-force controller is fed back to Elman neural network. Furthermore, since uncertainties of robot dynamics and obstacle location information, Elman neural network is also used to compensate for uncertainties and improve system stability performance. The control design conditions are relaxed because of the developed dynamic compensator. Finally, both simulations and results of obstacle avoidance are performed to show the potential of the proposed methods.
Keywords
Introduction
Recently, many researches have dealt with the design of control laws for obstacle avoidance and trajectory tracking of wheeled mobile robots. 1 –3 The tracking control problem for extended nonholonomic chained-form robot systems has received increasing attention, 4 and the global finite-time stabilization problem is also considered for mobile robots based on visual servoing and when subject to input saturation. 5,6 At the same time, mobile robots are no more restricted to factories and some specific places but are becoming closer to human beings when they moved to our families. 7,8 The basic idea of these algorithms is based on the parameters measured by the sensor and draws an environmental map around the mobile robot, which can avoid the collision between the robot and the wall object on path. The robots cannot find the path and collision avoidance of static obstacles, while maintaining the expected distance between the target and the robot. 9 –11 But if the robot needs to avoid the object collision timely, rather than relying on a static graphic avoid collision. There are mainly two basic motion tasks assigned to a mobile robot, 12 and under intelligent transportation systems, they can play an important role in the coordination between the vehicles and the roadside infrastructure, we need to use the dynamics of the collision-avoidance algorithms. 13 –15
The proportional-derivative (PD) control approach is already widely used in the automatic control system. 16 However, the PD control is usually devised in the linear scope that ignores control input limitation, closed-loop performance will deteriorate sharply in terms of desired linear characteristic. 17 Recently, the neural network (NN) attracted more attentions due to its versatile features such as taking indoor obstacle avoidance as example to show the effectiveness of a hierarchical structure that fuses a convolutional NN with a decision process. 18 Only use the easy connections between robot behaviors and sensors without considering the influence of time on behavior. One method that can take into account the effects of time is the local recursive Elman NN (ENN) 19 which means to use internal memory. 20 It possesses the favorable ability to predict time series because of its neural nodes as well as recursive connections. In the last few years, scientific research worker has already done efforts in this area. Cheng, Qi and Cai used the improved ENN for robot manipulator adaptive control. 21 Abbasi, Landolsi, and Dhaouadi used ENN with genetic algorithm training for fault detection of motor and management system. 22 Previously, we proposed the robot obstacle-avoidance strategies and the way of shooting for the android football systems as a journal article in 23 using ENN. In, 24,25 a kind of ENN scheme was presented to complete both the shooting method and obstacle avoidance such that the effectiveness of the ENN unlike the above efforts can be proved.
Although the ENN can complete the works, the system capability is not better in that the existence of uncertainty cannot be reduced really. Furthermore, since it has larger angular and linear velocities, large oscillation behavior occurs during the obstacle avoidance. 26 –28 Because of those limitations of ENN, in this study, it is necessary to consider the hybrid position/virtual-force (HPVF) structure in order to reduce the uncertainty of the impact and the inputs without changing the control scheme. 29,30 Thus, the ENN with HPVF control structure needs to be considered to get the same control mission in a wheeled robot. In this research, we have adopted ENN to compensate for uncertainty, while a number of shortcomings will be brought up with ENN alone to control the system. For example, real-time difference and relatively strong dependence on the hardware. Therefore, NN-based virtual-force algorithm is then employed to realize online self-tuning and to reduce the influence of uncertainties during the control. Furthermore, since the ENN with HPVF control structure can have much smaller angular and linear velocities, it can show better performance during obstacle-avoidance process. 31 –33 By this means, the satisfactory behavior of both position location and obstacle avoidance is achieved by using the ENN with HPVF structure for the wheeled mobile robot.
This study discusses in detail the optimization method for ENN-based deep learning control for obstacle avoidance of robot using HPVF incorporation. In the second section, mobile robot dynamics and kinematics are described. The third section introduces the ENN algorithm and hybrid position/virtual-force scheme and presents the method of using HPVF to optimize the ENN. In the fourth section, the simulation is given to verify the validity and efficiency of the proposed approach. Finally, some conclusions are drawn in the fifth section.
Mathematical model of wheeled robots
Generally speaking, the wheeled robot moves on the ground, and its dynamic model does not depend on the potential energy but depend on the dynamic energy. 27 The robot posture is shown in Figure 1, and robot model is described as

Model of the wheeled mobile robot.

where



where mc is the weight of robot without wheels, m is the robot weight, and φ is the heading angle. In order to make equation (1) much simpler, we can eliminate Lagrange factor.
And the speed of the wheeled robot is defined as follows


Forward velocity
The velocities in Cartesian space and velocities in joint space have the relationship

Applying equation (10) to equation (9), the following Jacobian relationship is obtained


Each element of
Using

where

Furthermore,

Matrix

Substituting equation (17) into equation (16) yields the dynamic equation of system that can be described as follows

where b ≡ l/2 and c ≡ r/1.
Suppose the wheeled mobile robot moves slowly, then the Coriolis forces and centrifugal will equal 0. And the dynamic model can be made much simpler, and it can be described as

The robot on the ground can be treated as an inertia system. Obstacle avoidance is a key performance of robots. However, its experimental verification is rather difficult, due to the probabilistic behaviors of both the robots and the obstacles. This article presents a kind of obstacle-avoidance strategies-based dynamic models for a mobile robot in an unknown uncertain environment. The model is employed to analyze the behavior of the robot. And the objective is to design a dynamic model, such that the output trajectory between the desired output
Controller design
Intelligent HPVF control
HPVF intelligent scheme separates position control and force control, while the control of impedance does not control individually. And the dynamic model of the robot is given in equation (1), where

where


The time derivative of equation (21) yields

where

where

We design the component of force along the x axis and y axis as follows

where

Setting

where

For the virtual-force control, we obtain a control law u1 as follows

Substituting equation (30) into equation (29) yields

The control law of the position control direction can be described as

For the position control, with

The force control and position control are selected by the selection matrixes


The hybrid control law can be described as

where
If the estimated values for the model of robot are exact, such as

where
Generally, if we cannot obtain the accurate model of the robot, equation (37) cannot be achieved. This is the real reason why an intelligent control approach is needed. As an intelligent approach, the ENNs control is introduced. In this study, we have used the reference compensation method as an online training algorithm. In order to reduce the output errors, NN compensation values are added to the input of PD-type controller. ENN is combined with the virtual-force and position control, respectively. We add the compensation signal Φ into the input ports of ENN. The compensating signals can reduce the output errors. This can compensate the system uncertainty, while not affecting the interior structure of the control system. There are six inputs and one output in this intelligent control system, which played different roles in control of the virtual-force and position. The compensating signal values are also added to the input for virtual-force and position control, respectively. For the force control field, we have

where

In the same way, for the position control field, the control input is given by

Then, substituting equation (40) into equation (29) yields

Considering equations (39), (40), and (41), the overall control law is given by

Figure 2 shows the intelligent controller with position and force signal.

The intelligent controller with position and force signal.
Learning algorithm
This article uses the special recurrent NN, whose structure is as shown in Figure 3. It has an input, an output, a hidden, and a context layer. The network structure of the Elman is shown in Figure 3. Nine neurons for the input layer, 7 neurons for the hidden layer, 7 neurons for the context layer, and 4 neurons for the output layer are used. ex, ey, and ei are the error input signals for the ENN. All nonlinear functions for the neurons are the tangent hyperbolic function. It is represented as follows

The structure of ENN. ENN: Elman neural network.

NN outputs can be described as



The training signal can be described as

The ENN online learning structure is considered as a special type of recurrent NN with local feedback and memory neurons. The “local connections” of context nodes in the ENN make its output sensitive not only to the current input data but also to historical input data, which is useful in time series prediction. Using the number of iterations k, we obtain the following equation



where

At the kth learning iteration step, the output of context node i is one-step delayed output of the hidden node i

Define


And in this study, the objective function can be defined as

Differentiating equation (55) with respect to weights, we have



Equations (48) to (58) are used in ENNs algorithm.
Simulation experiment
Constraint for the three wheels mobile robot on MATLAB is established. To verify the validity of the model, the simulation parameters are shown in Table 1. All the simulations are carried out via the MATLAB 2012 version in an intelligent Intel (R) core (TM): i5-6500 processor personal computer, RAM 4G, and 64 bit operating system. In this article,
Basic parameters and torque parameters of robot.

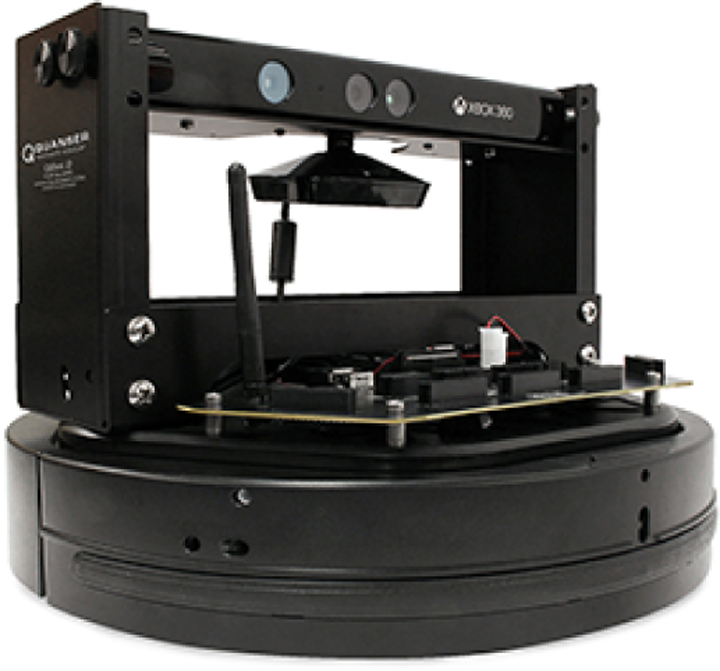
Robot used in this study.
For the positional vectors
Figures 5 –10 represent the position vectors of the trajectory-tracking curve. The six graphs can fully demonstrate that introduced intelligent algorithm can achieve both position stabilization and obstacle avoidance. First, the robot follows the smoother and shorter path using the proposed method. This implies that the ENNs-based training technique HPVF control can reach the goal position and obstacle avoidance accurately, and this method can realize the real-time obstacle avoidance, as illustrated in Figures 8 –10: the stability of the tracking curve is obviously better, the response curves becomes more smoother, and the fluctuation amplitude of i becomes smaller. Actually, ENN hybrid position/force shows less oscillation behavior during obstacle avoidance.
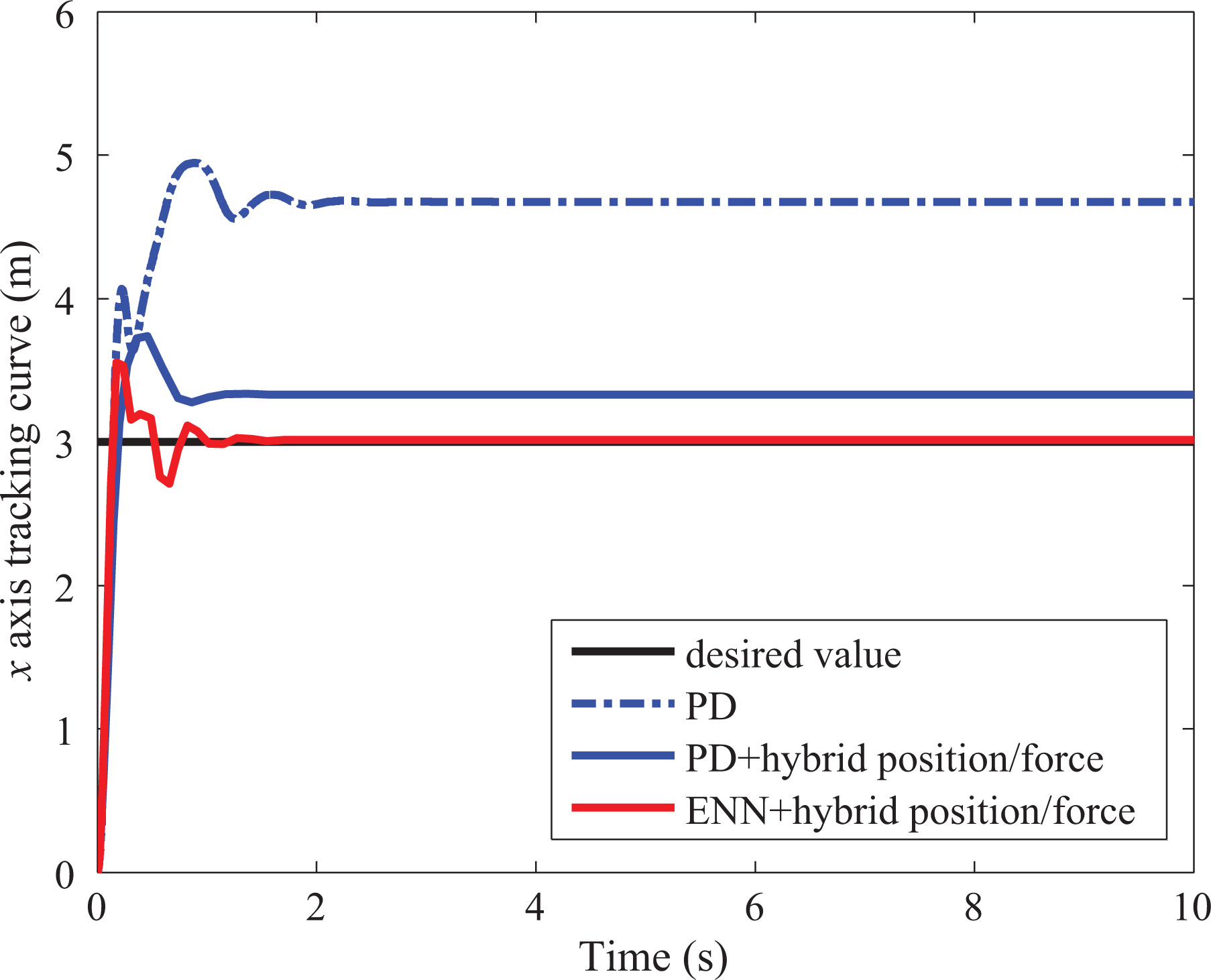
X axis direction-tracking curve.

Y axis direction-tracking curve.

Trajectory tracking of the direction angle.

X axis error.

Y axis error.

Direction angle error.
For the force vector
Figures 11 –13 show the simulation results based on the same conditions of the environment scene. According to the results, we notice that the obstacle-avoidance curve of ENN with HPVF structure is closer to the desired value. Using the intelligent scheme, the robot has smaller tracking errors and shorter moved distances. Figures 14 and 15 represent the error curve of horizontal component in fx and fy precision is significantly improved, while the transition time reduced significantly. In Figure 16, the steady-state error value is 0.3, which cannot be neglected. By using ENN with HPVF control approach, the system has much smaller distance error and shorter moved distance than the other two methods.
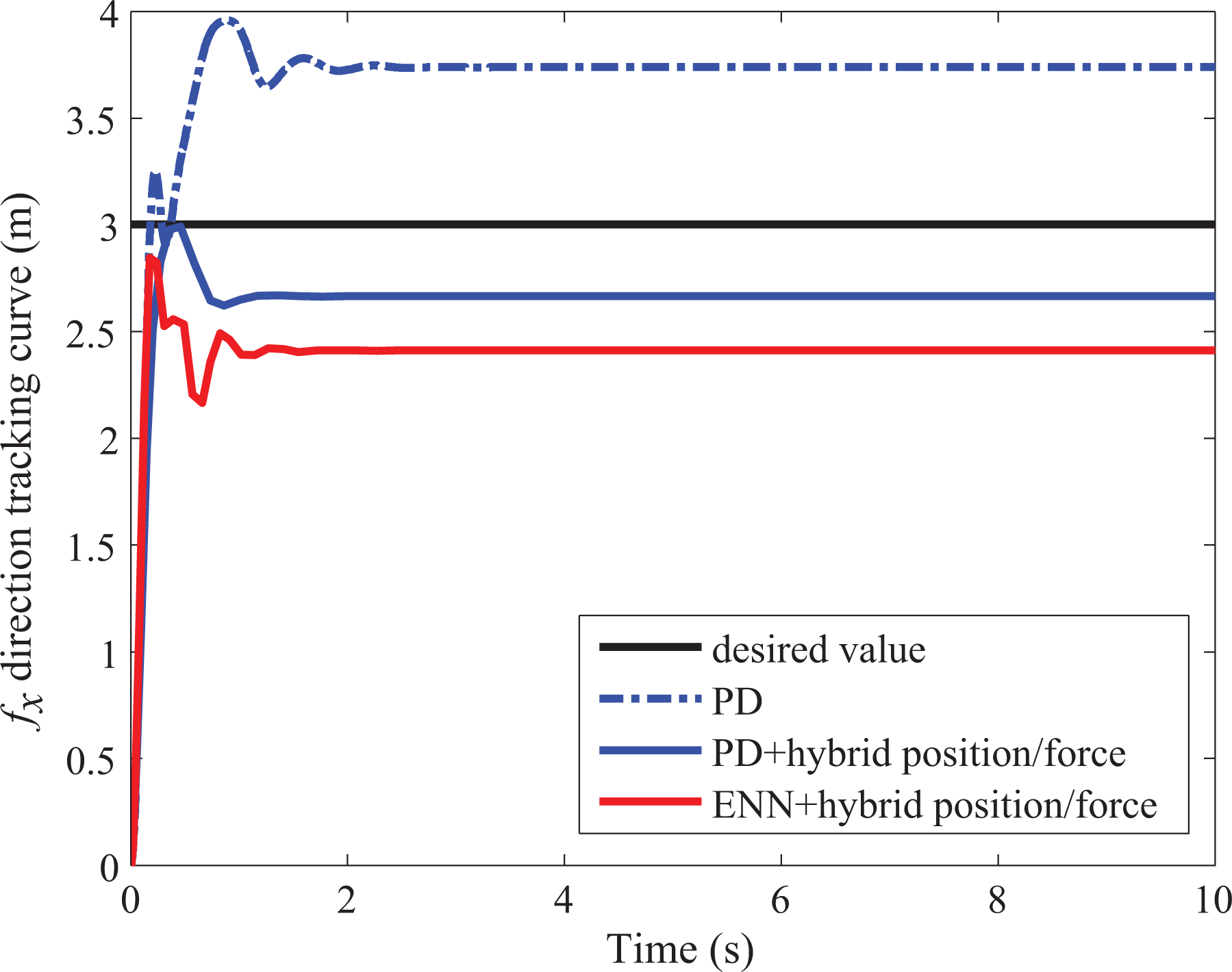
fx direction-tracking curve.
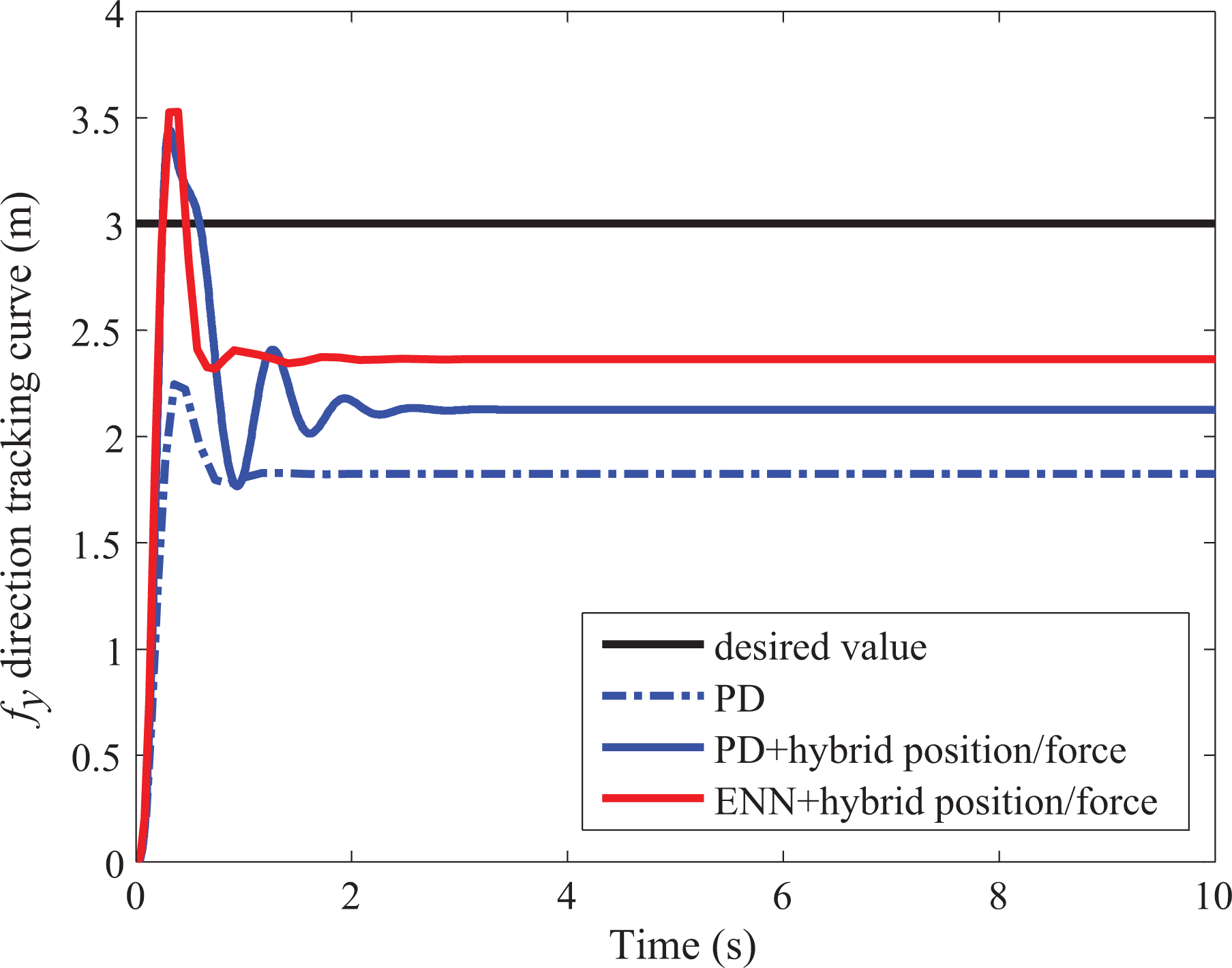
fy direction-tracking curve.

fi direction angle-tracking curve.

fx error.
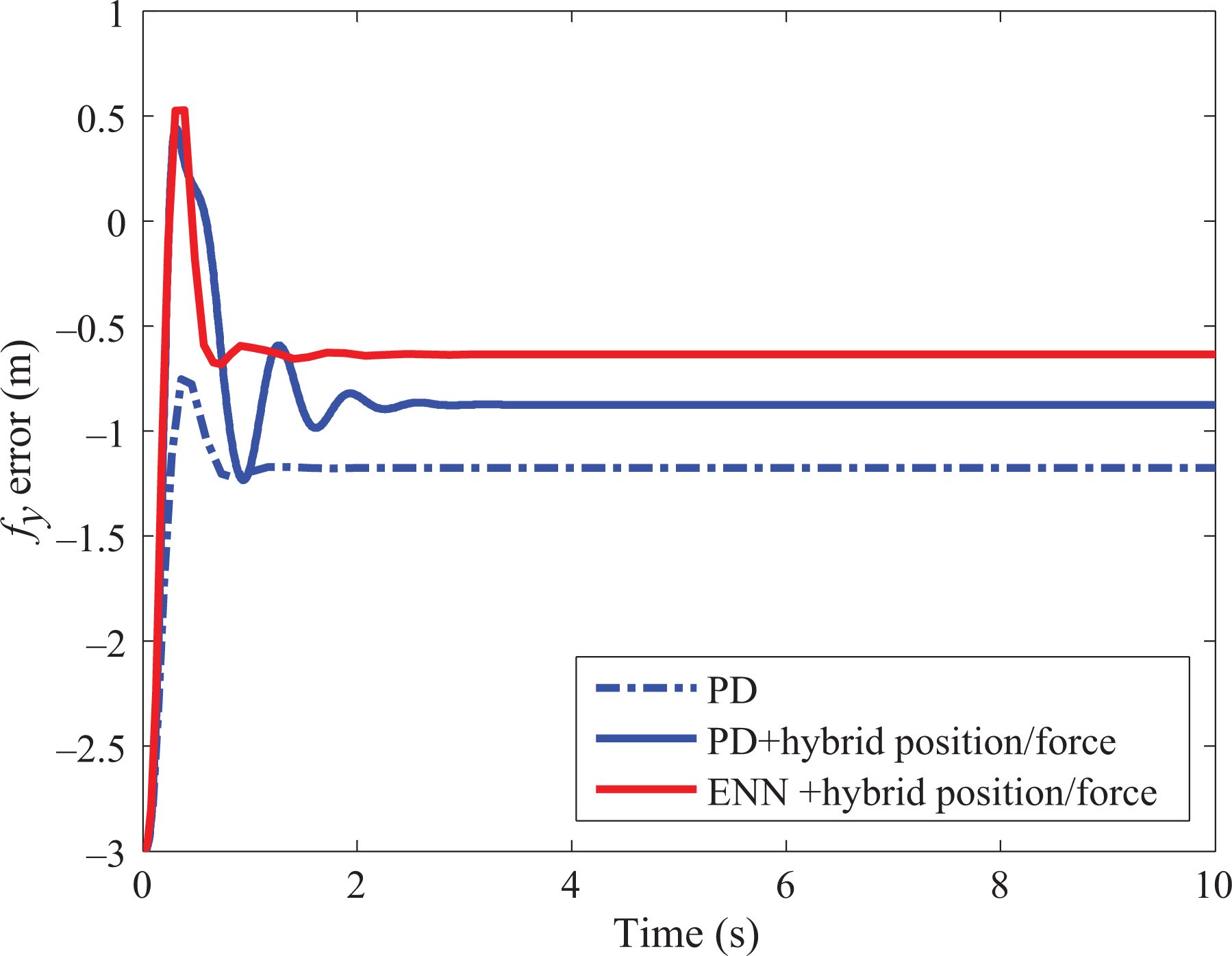
fy error.
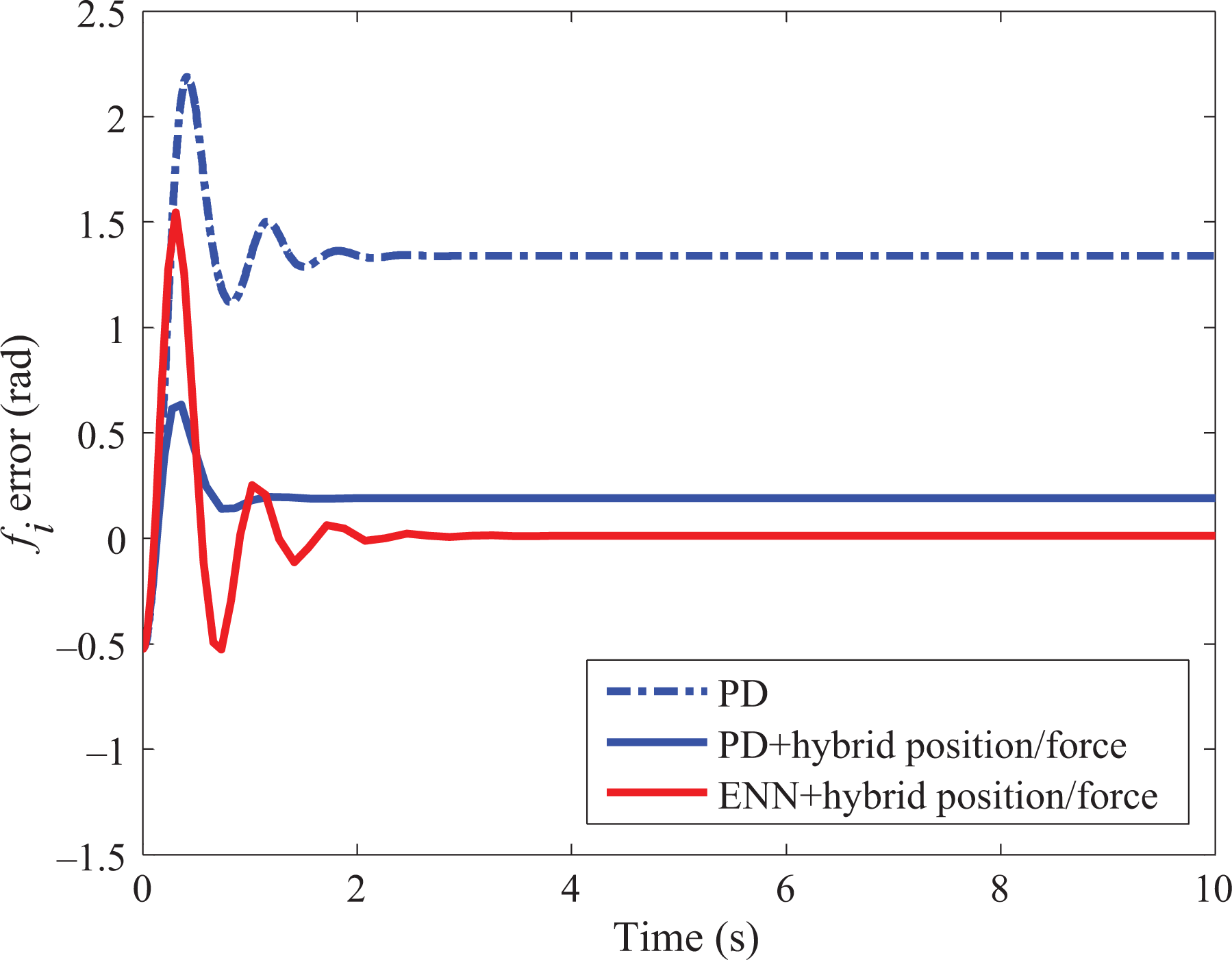
fi error.
For the rotation angles and control inputs
As illustrated in Figures 17 and 18, under the conventional PD control PD HPVF control, the amplitude fluctuation of the left and right wheel rotation angle curve is relatively large. After introducing the Elman-based deep learning algorithm and virtual-force structure, the fluctuation becomes stable. Actually, the proposed method shows less oscillation behavior during obstacle avoidance. Control input is provided here when using the three methods; it can be seen in Figures 19 and 20 that this intelligent system indicates high-performance dynamic characteristics and stronger robustness.
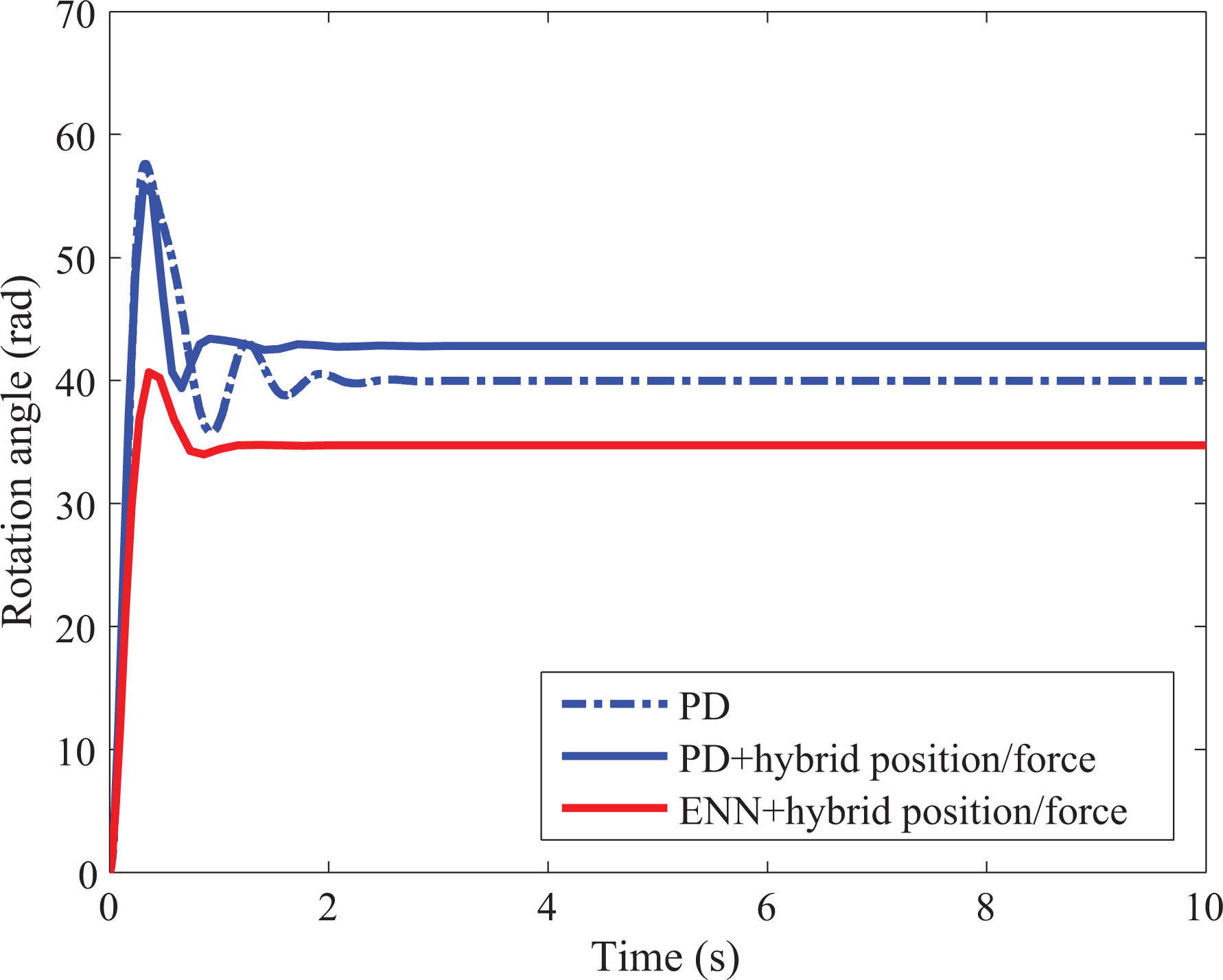
The left wheel rotation angle.

The right wheel rotation angle.

Control input f1.
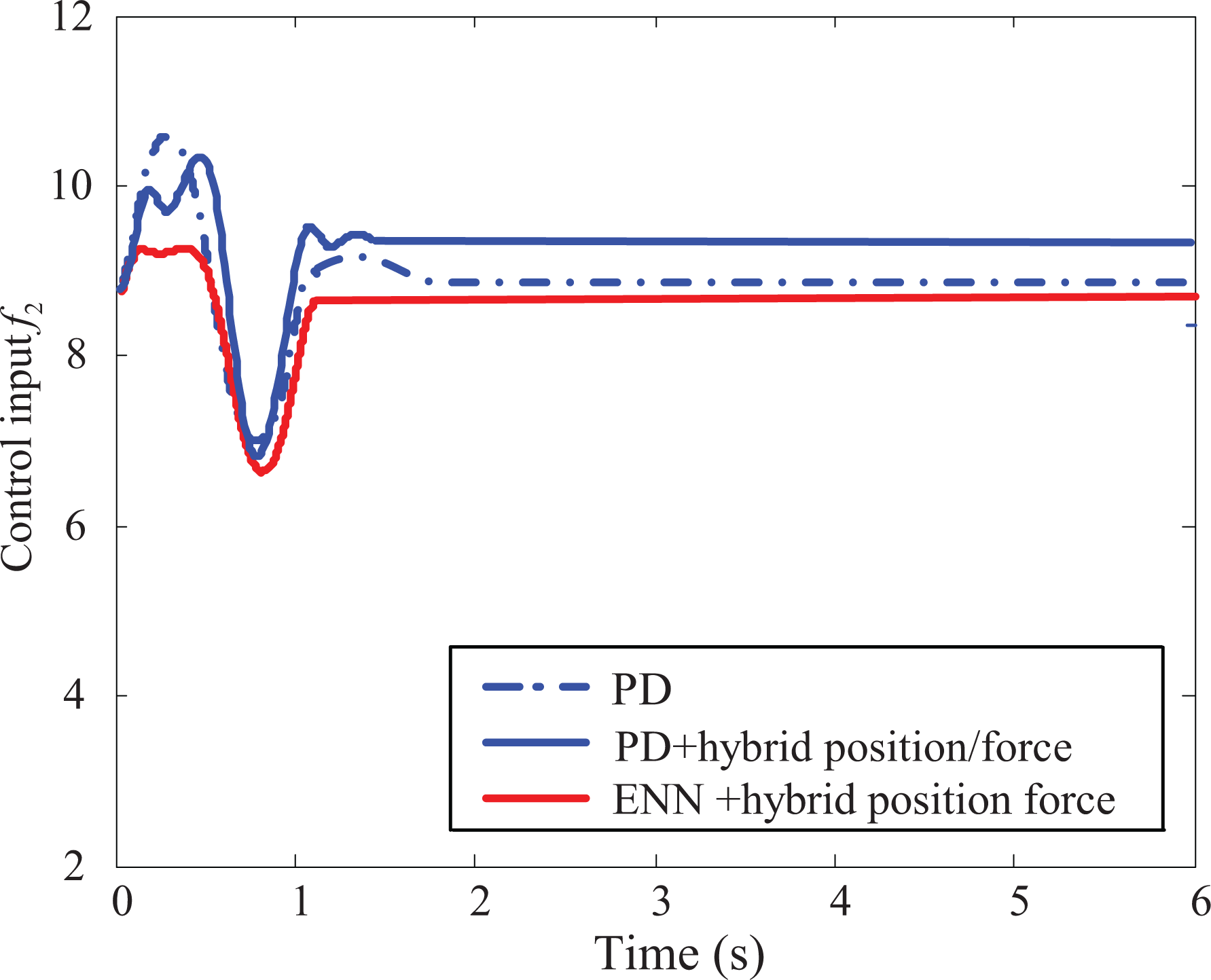
Control input f2.
Results of obstacle avoidance
The optimal path planning is created from start position toward the goal position. It is expected that the proposed control can realize collision avoidance in a complex environment with many static obstacles. The mobile robot gains the distance information from five range finder sensors equipped to the robot. Then the location information of static obstacles is considered the known information, and the start position is known while the environment is completely unknown. The same translational velocity and environment with the proposed approach is set. Maximum velocity is set to
In all three cases, the robot should determine steering to shorten the path to the goal position and avoid obstacles. Select the same start point and different end point at the same environmental conditions and obtain six trajectories in this study; the initial start point is (1.7, 2). It can be seen from Figures 21 and 22 that the robot made a left turn because it is found to be the shorter path. We can also observe that the robot shows overshoot response when an obstacle is appeared. This is due to the dynamic effect of the robot, which is usually ignored in kinematics model. As illustrated in Figures 23 –26, a better collision avoidance performance can be achieved using the proposed strategy, even multiple obstacles of the same shape (Figures 23 and 24) or multiple obstacles of the different shapes and sizes (Figures 25 and 26). The results are shown in Table 2, the results demonstrate that the robot can find a shortest way to the goal position and maintain a desired distance from the obstacle. Computing a collision-free trajectory for a robot located is a difficult task, 7 this collision-free trajectory has to solve two problems. One is the geometric formulation and second is the nonholonomic motion.

PD hybrid position/force control. PD: proportional-derivative.

ENN hybrid position/force control for one obstacle for one obstacle. ENN: Elman neural network.

PD hybrid position/force control. PD: proportional-derivative.

ENN hybrid position/force control for multiobstacles. ENN: Elman neural network.

PD hybrid position/force control. PD: proportional-derivative.

ENN hybrid position/force control for multiobstacles with different shapes. ENN: Elman neural network.
Contrast table of motion trajectory of two strategies.
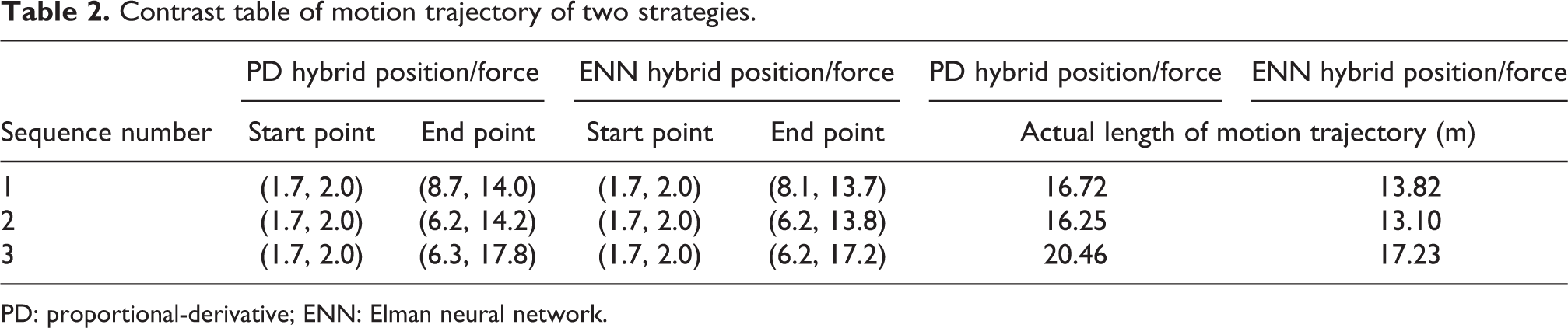
PD: proportional-derivative; ENN: Elman neural network.
Case 1: one static obstacle on one side of the robot,
Case 2: multiple obstacles of on both sides of the robot, and
Case 3: multiple obstacles of the different shapes and sizes on both sides of the robot.
Conclusions
In this work, we propose an HPVF control algorithm to address obstacle-avoidance problems for a class of nonlinear robot system with an uncertain or interference component. The main contribution of this article is adding an HPVF control algorithm to the existing ENN method for nonlinear robot systems. Based on the superiorities of the ENN, the HPVF scheme has guaranteed the requirement for high-precision-tracking errors in different conditions. Furthermore, all the ENN online learning control laws in the HPVF control scheme are obtained, so that the stability can be ensured whether or not the appearance of interference and uncertainties. By comparing the simulation results, it can be seen that the ENN intelligent HPVF control approach is better than previous two methods, and the robustness and stability features have been improved. In addition, this method weakens the convergent influence of the system caused by the uncertain part of the system and the nonrepetitive disturbances. Future work will aim to apply the proposed algorithm to actual robot control and biochemical reaction processes.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.