
Abstract
The stability analysis method based on region of attraction is proposed for the hypersonic flight vehicles’ flight control verification in this article. Current practice for hypersonic flight vehicles’ flight control verification is largely dependent on linear theoretical analysis and nonlinear simulation research. This problem can be improved by the nonlinear stability analysis of flight control system. Firstly, the hypersonic flight vehicles’ flight dynamic model is simplified and fitted by polynomial equation. And then the region of attraction estimation method based on V–s iteration is presented to complete the stability analysis. Finally, with the controller law, the closed-loop system stability is analyzed to verify the effectiveness of the proposed method.
Introduction
A large number of flight tests have proved the feasibility of hypersonic flight vehicle (HFV). With the high flight speed, wide flight envelope, complex flight environment, and the strong nonlinear relationship between system input and output, HFV’s control problem has always been a hot issue in recent years. 1 It is well-known that the nonlinear model of HFV is unstable or even has some highly complex motion characteristics. Different considerations during the controller design process are presented, such as aero-thermo-elastic effects, 2 control constrain, 3 and so on. Aiming at these considerations, different control technologies have been introduced into this field, such as backstepping, 4,5 neural network, 6,7 and sliding mode controller, 8 and so on.
However, in practical engineering, the stability check of the closed-loop system is the primary consideration, that is, such safety critical system requires extensive verification prior to entry into service. Although the stability of aircraft has been greatly improved by the introduction of modern advanced control technology under normal condition, some undiscovered characteristics or unstable state points of aircraft could bring great threat to flight safety, which can even lead to significant accident. The aircraft’s stability problem has attracted increasing attention by many scholars and institutes, the NASA’s Aviation Safety Program plans to reduce the fatal aircraft accident rate by 80% by 2007, and by 90% by 2022. 9 The methods for aircraft’s flight control verification can be divided into analytical, simulation, and experimental technologies. In the current practice, linear analysis approach is applied widely in this field, and the good effect has been gained, it assesses the closed-loop system’s stability and performance characteristics of aircraft at the trimming point. However, linear analysis approach must be supplemented by the full dimension model simulation to provide further confidence and reveal some nonlinear complex characteristics and does not involve analytical nonlinear methods. In conventional aeronautical field, the gap between this linear analyses and actual nonlinear dynamics has led a number of significant accidents, for example, F/A-18, 10,11 the FBC-1.
Recently, nonlinear stability analysis method for regions of attraction (ROAs) or stability region estimation has been paid attention by academic communities. 12,13 System’s ROA estimation is a complex and meaningful question, in the early 1990s, Jackson and Kodoeorgiou 14 have analyzed and pointed out that, even a simple two-dimensional low-order system, its ROA may also be very complex or even has bifurcation. The commonly used method for ROA estimation in control field is numerical solution based on Lyapunov function. This method constructs Lyapunov convex function at equilibrium point and then constraints or guarantees that the system state’s trajectory is convergent to stable fixed point by the function’s negative definite. As the solution of Lyapunov convex function is concerned with the system semi-definite programming (SDP) problem and this SDP is described by the polynomial, around the year 2000, Doyle developed SOSTOOLs (the sum of squares optimization toolbox for Matlab [Version 3.00], was developed by the A. Papachristodoulou, J. Anderson, G. Valmorbida, S. Prajna, P. Seiler, and P. A. Parrilo), this software tool decomposes polynomial by sum of squares (SOS), constructs the convex quadratic inequalities, and then completes the convex optimal problem of Lyapunov function. 15 After that, the ROA analysis based on SOS has become a hot spot.
Unfortunately, the traditional SOS techniques can only be used to the system dynamics with polynomial expression, to complete the HFV’s controller validation, the polynomial fitting and approach optimization should be done. The objective of this article is to demonstrate the advantage of nonlinear SOS method in the HFV’s control law validation stage and then show its effectiveness by case study. With the NASA’s winged-cone configuration hypersonic vehicle simulation model, 16 the polynomial fitting model is constructed firstly in this article to represent the HFV’s longitudinal dynamics, and then the ROA analysis approach will be proposed to complete flight control law verification.
The outline of this article is as follows. In “Hypersonic vehicle models” section, the NASA’s winged-cone configuration hypersonic vehicle’s longitudinal aerodynamic equations are presented firstly, and then the polynomial fitting model for longitudinal dynamics is obtained. “The ROA estimation method based on V–s iteration” section describes the ROA estimation method based on V–s iteration and shape factor optimization. Furthermore, the ROA analysis for this polynomial model is completed to demonstrate the computational procedure in “Closed-loop system analyses of HFV” section. In the end, “Conclusions” section presents several comments and final remarks.
Hypersonic vehicle models
Longitudinal model description
The model for a winged-cone configuration HFV’s flight dynamics developed by NASA Langley Research Center has presented in the literatures,
8,16,17
its parameters are provided in Table 1. And the vehicle’s longitudinal aerodynamic equations (the cruising Mach number is 15 and flight altitude is 110,000 ft) are





Aircraft and environment parameters.

where
The related definitions of force and moment are given as

where



where δT set is the throttle setting and δe is elevator deflection. And the trimmed cruise condition of such HFV can be shown in Table 2 below.
The trimming condition.

HFV’s polynomial fitting model
Assumption 1
Since the value of θ − α is quite small during the cruise phase, we can simplify the sin and cosine function as
As the system ROA analysis is established by polynomial semi-positive definite programming, that means, the non-polynomial items in the traditional differential equation need to be fitted by polynomial.
With the multivariate nonlinear polynomial fitting method based on least squares,
18
the non-polynomial items’ standard polynomial expression with specific parameters can be got by the “Minimize the SOS of deviations” principle. Using this method, the

where
Substitute the parameters’ polynomial description and simplification into HFV’s longitudinal model in equations (1 to 5), then we can get the longitudinal five states polynomial normal system

where




The ROA estimation method based on V–s iteration
ROA estimation
For the nonlinear polynomial autonomous system

where f(x) is the polynomial function with variation x, and f(0) = 0, the original state point is assumed to be local asymptotic stable equilibrium point.
The ROA of system, that is, the local asymptotic stability region of the system, is defined as

The estimation of ROA is to explore the system’s specific stable area. It’s difficult to compute the ROA exactly for nonlinear dynamical system, and there has been significant research devoted to the ROA’s invariant subsets estimation.
Lemma 1
If there exists a continuously differentiable function
V is positive definite
then for all
In Figure 1, the ROA Ω defined by the solid line is an elliptical zone, and the

ROA estimation diagram. ROA: region of attraction.
In order to enlarge the ROA, we define a variable sized region 20

and then maximize β with the constraint

The set
With the S-procedure and SOS programming, 19 the following sufficient conditions can be obtained based on the optimization conditions above

where s1 and s2 are SOS polynomials, and

where
Advanced V–s iteration algorithm for ROA estimation
The constraint equations in the subsection above, contain some unknown variables, for example, β, V, and their products, such as the product of β and s1, V and s2. During the numerical solution process, these products will make that the SOS problem cannot be translated into a linear SDP, that is, bilinear problem.
To solve this bilinear problem, V–s iteration method will be introduced, the basic idea of V–s iteration is to divide the unknown variables into two groups. During this process, the two variables in product should be assigned to different groups, and one variables group is fixed to solve another group, and then exchanged for the next solution loop. With this process, the SOS problem can be transformed into linear SDP.
Moreover, the constraint condition in optimization problem above

means that the variable sized region Pβ is contained in the system’s ROA, or we can say that, for this constraint condition, the Pβ with different “radius β” is used to enlarge or optimize the system’s ROA. So the shaper factor p(x) selection and ROA optimization has a very close relationship and the selection of p(x) will affect the ROA’s optimization.
To solve these problems, the advanced V–s iteration algorithm for ROA estimation is 20
1. Initialization: Compute the Jacobian matrix of f evaluated at x = 0

Then solve the equation

for a positive definite matrix P. Define


2. γ Step: Hold V fixed and solve the following SOS programming for


where l2 is define in equation (10). The product problem of γ and s2 can be solved by the conventional V–s iteration approach. 21,22
3. β Step: Hold V and p fixed and solve the following SOS programming for


Similarly, such bilinear problem can be solved by the conventional V–s iteration approach.
4. V Step: Hold s1, s2, β*, γ*, and p fixed and compute V such that



where l1 is defined in equation (10).
5. Scale V: Replace V with
6. Update p: Replace the quadratic part of the new V as new p.
7. Repeat: Now with the new V and new p repeat the algorithm to reach to the maximum number of iterations.
To clearly demonstrate the optimization procedure of this advanced V–s iteration algorithm, the algorithm flow chart is shown as follow.
The maximum degree of V, s1, and s2 is restricted in this algorithm, that is, the maximum degree of these polynomials should satisfy

where
Closed-loop system analyses of HFV
In order to demonstrate the effectiveness of the proposed method, a simple and classical optimal quadratic controller design method is adopted for the aerodynamic equations (1 to 5) above. Firstly, the model is linearized at the trimming point

And then the controller can be got by the lqr command in Matlab®

Substitute this controller into the polynomial nonlinear model equation. (7) to get the closed-loop system model below. With this closed-loop system expression, the HFV system’s ROA which is centered as trim point can be estimated.

To complete the ROA estimation, we set whole programming iteration steps as N = 10. And for the γ and β steps in subsection “Advanced V–s iteration algorithm for ROA estimation”, we take the cycle overflow condition or tolerance


It is worth noting that the initial value
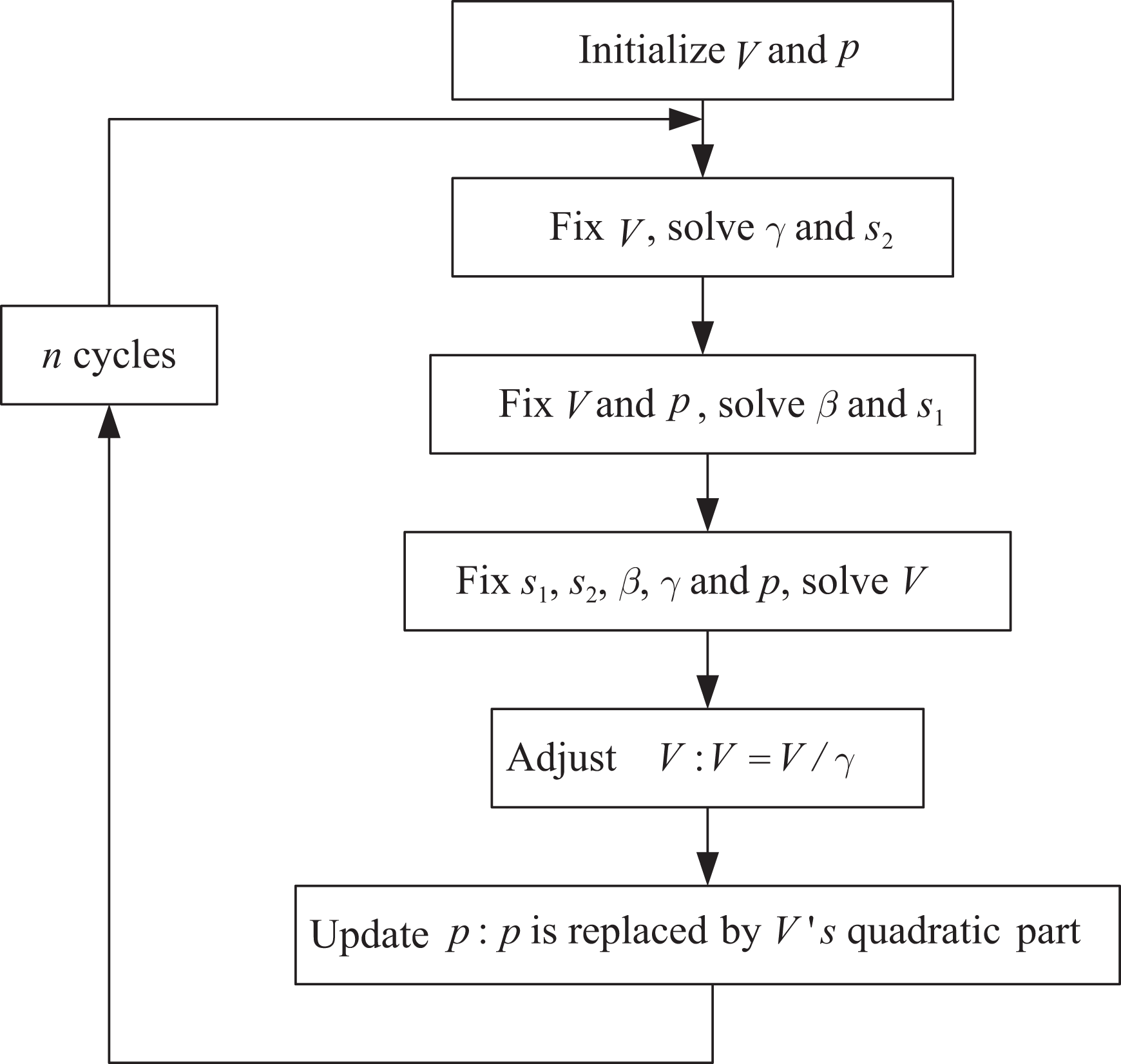
Advanced V–s iteration algorithm flow chart.
With the advanced V–s iteration algorithm in subsection “Advanced V–s iteration algorithm for ROA estimation” and the initialization setting above, the ROA estimation results of normal aircraft can be got as Figure 3 below.
ROA of closed-loop system 1. ROA: region of attraction.
In Figure 3, the dotted line ellipse region
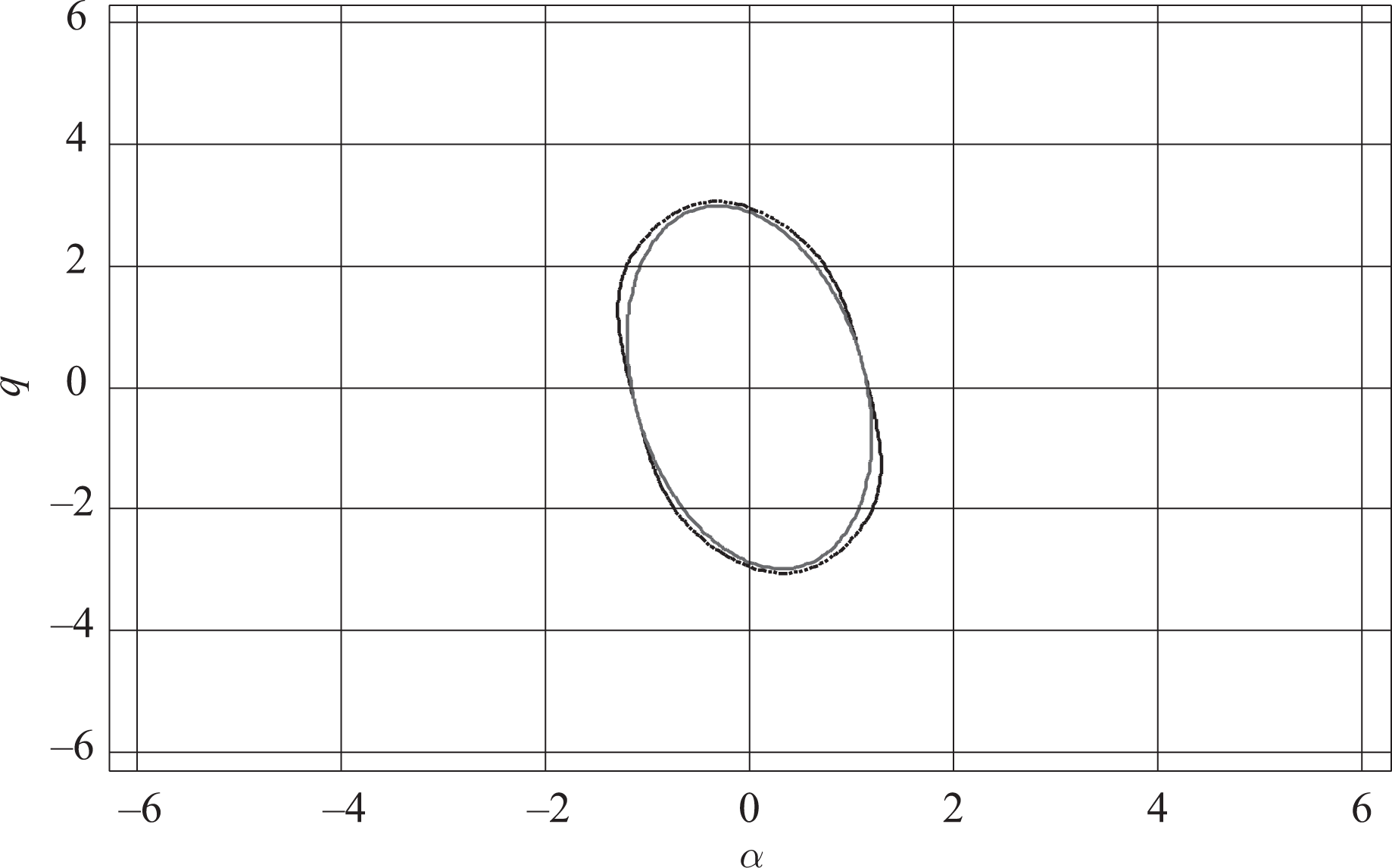
To show the benefit and effectiveness of nonlinear ROA estimation for flight control analysis, the system’s phase diagram is drawn in Figure 4 firstly and compared with the ROA region in Figure 5 below.

Phase track of α and q.

ROA of closed-loop system 2. ROA: region of attraction.
Figure 5 shows that, the nonlinear ROA estimation result contains most of the stable region of closed-loop system, and it captures the size of the stability region of the system. In engineering practice, it’s very difficult for the complex nonlinear system to complete the analytical solution or phase plane analysis, and the conventional linear analysis will miss some important characteristic of actual aircraft. The proposed method in this article can be used to verify the flight control system of HFV or analyze system’s stability.
Conclusions
The main contribution of this article is to present the polynomial modeling and ROA estimation approach for the HFV’s closed-loop system, which is helpful to complete the flight control verification. Such approach utilizes the polynomial model of NASA’ winged-cone configuration hypersonic vehicle and advanced V–s iteration algorithm to complete ROA estimation.
Case study results for the closed-loop HFV system were completed to show the validity of the proposed method. Further consideration should be focused on the integration problem between the controller design and ROA estimation for HFV.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by National Natural Science Foundation of China (61304098, 61622308), Natural Science Basic Research Plan in Shaanxi Province (2016KJXX-86) the Project Supported by Natural Science Basic Research Plan in Shaanxi Province of China (program No. 2015JQ6255), and Fundamental Research Funds of Shenzhen Science and Technology Project under grant JCYJ20160229172341417.