
Abstract
In this article, a global adaptive neural dynamic surface control with predefined tracking performance is developed for a class of hypersonic flight vehicles, whose accurate dynamics is hard to obtain. The control scheme developed in this paper overcomes the limitations of neural approximation region by employing a switching mechanism which incorporates an additional robust controller outside the neural approximation region to pull the transient state variables back when they overstep the neural approximation region, such that globally uniformly ultimately bounded stability can be guaranteed. Especially, the developed global adaptive neural control also improves the tracking performance by introducing an error transformation mechanism, such that both transient and steady-state performance can be shaped according to the predefined bounds. Simulation studies on the hypersonic flight vehicle validate that the designed controller has good velocity modulation and velocity stability performance.
Keywords
Introduction
Hypersonic flight vehicles (HFVs) with the unique superiority of its own (such as high speed, quick response and strong penetration power) meet the increasing commercial and military demands for space access very well. HFVs are the focus of recent research in various space powers, but the flight aerodynamic environment is complex, and its model uncertainty increases because of its high speed, which makes the design of guidance and control system difficult.
In the study by Xu and Shi, 1 the comprehensive review of hypersonic flight dynamics and control approaches is presented. Until now, varieties of algorithms 2 –6 have obtained great effects on HFVs. The minimal learning design for adaptive control of hypersonic flight is given in the study by Xu et al., 7 whereas in the study by Xu et al., 8 the command filter-based adaptive fault tolerant control is analyzed in the case of actuator fault. Furthermore, the disturbance observer-based design can be used to deal with the time-varying disturbances. 9,10 Since the work condition faced in HFVs is extremely complex, which is always unknown, dynamic and nonlinear, little knowledge about HFVs dynamics parameters is available in real applications. And then, with the emergence of intelligent science, 11 –19 there is a new pathway to research on HFVs control.
In terms of learning capacity, neural network (NN) is an excellent universal approximator. More significantly, the universal approximation property of NN is based on the Stone–Weierstrass theorem, which states that on a compact set, a universal approximator can approximate any real continuous function 20 with arbitrary order of accuracy. NN that is used as a universal approximator in the control problem is investigated in the literature. 21 –23 Backstepping technique, 24,25 a highly effective design method for a systematic nonlinear control synthesis, combines with NN control that has been developed in the study by Ge et al. 26
As a matter of fact, only when in a compact set, the NN approximation ability is valid. Consequently, the conventional NN-based control could only ensure the semi-globally uniformly ultimately bounded (GUUB) stability. For enhancing the robustness of HFVs, it is meaningful to develop a global neural controller. For the sake of extending the application range of a neural controller, a robust controller for robot manipulator is developed. 39 In the study by Xu et al., 27 a global neural controller, designed by connecting an additional robust controller outside the neural approximation region to pull the transient states back into the neural approximation region from the outside, was proposed for HFV with unknown dynamics.
From a security point of view, the aforementioned adaptive neural control couldn’t guarantee the transient performance. Because of the learning characteristic of NN, an unexpected transient performance might occur in the early phases of learning process, especially when large initial parameter estimation errors exist. The transient performance of the controller affects the performance of the vehicle system and the safety of flight. In this way, the demand for transient performance of a vehicle system is particularly prominent. The idea of system with prescribed performance 16,28 –31 provides a good way to solve this kind of problem. Strikingly, in the study by Na et al., 29 a priori prescribed performance is achieved by introducing a performance function, which is used for the output error transformation. While in the study by Dai et al., 30 an adaptive neural controller achieves predefined transient tracking performance by employing an error transformation mechanism. In the study by Chen et al., 31 backstepping technique is embedded into the design of guaranteed transient performance-based attitude control with control input saturation.
Inspired by the aforementioned work, in this design, an NN employed dynamic surface control (DSC) technique 12,32,33 is devised for HFVs with guaranteed tracking performance and global stability.
This overall structure is as follows: dynamics of HFVs is characterized in ‘Problem formulation’ section. ‘Preliminaries’ section describes the brief notion of the radial basis function (RBF) NNs, furthermore, useful functions and key lemmas are presented as well. The global neural controller is addressed for HFV in ‘Tracking performance guaranteed neural control design’ section. In ‘Simulation studies’ section, the simulation results validate that the design we suggest is credible. Finally, ‘Conclusion’ section sums up the previous design.
Problem formulation
Hypersonic vehicle dynamics
According to the study by Parker et al.,
34
the model of HFV is constructed based on five state variables
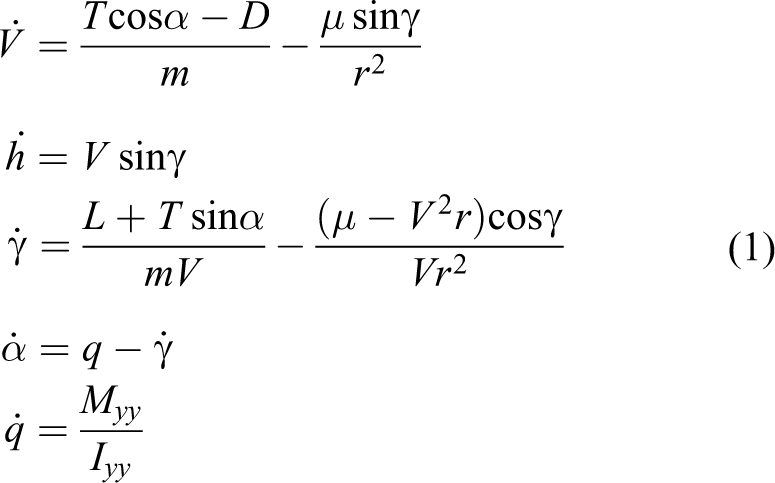
The detailed explanation of the parameters values is summarized in Table 1.
HFV model description.

HFV: hypersonic flight vehicle.
System transformation
The entire model of HFV consists of two parts: velocity subsystem and attitude subsystem. The form of velocity subsystem takes as follows

For the altitude subsystem, the FPA command is selected as follows

where hr represents the reference signal,
Attitude subsystem of HFV is a single-input-single-output system, which can be rewritten as the following form

where
Definition for nonlinear functions.

Preliminaries
RBF NNs
In the following controller design process, the RBF NNs 35 are utilized to estimate the unknown dynamics

where

where
The form of RBF NNs estimating the unknown function f on a compact set

where W* optimal weight vector, and

The estimation error is uniformly bounded by

Predefined transient tracking performance
The predefined performance is achieved by bounding the tracking error to a predefined region, which is determined by sustained decreasing dynamic functions with the time. The expression of predefined tracking performance is as follows

where 
where

Tracking error and performance function.
Useful functions and key lemmas
Assumption 1
The reference signals and their derivatives are all smooth bounded functions.
Assumption 2
There exists positive constants
Lemma 1
Introduce an extremely important inequality
37
for our design, which holds for any

where
Define 1
For the given parameter θi within the subset

where
Definition 2
Defining a compact set Ωr and the boundaries of which are given as


where
Tracking performance guaranteed global adaptive neural control
This section investigates global adaptive neural control for HFV altitude subsystem to guarantee the predefined transient and GUUB stability. For the velocity subsystem, a proportion integration differentiation (PID) controller is developed to guarantee the stability. The control block is shown in Figure 2.

Control strategy.
Controller design
To achieve the tracking control system satisfying the constrained performance, a suitable output error transform function
30
is employed to solve the constrained problem. For this purpose, define a smooth and strictly increasing function

Using the properties of

where

In this article, we choose the smooth and strictly increasing transformed function

where

Differentiating equation (18) with respect to time yields

where

According to equation (10), it can be inferred that
When the initial errors
Step 1: Define the FPA error

where

On the compact set

where
The virtual controller

where


where
The adaptation laws of the adjustable parameters


Introducing a first-order filter and a new state variable

where
Define

Then, equation (24) can be further derived as follows

Step 2: Define the dynamics of the pitch angle tracking error

According to equation (21), we have

The virtual controller

where
Similar to equation (31), the filtered signal

where
Define

Then, equation (35) can be further derived as follows

Step 3: Define the dynamics of the pitch rate tracking error

According to equation (21), we have

Similar to step 1, we have

On the compact set

where
The control input u is designed as follows

where


where
The adaptation laws of the adjustable parameters


Equation (41) can be further transformed as follows
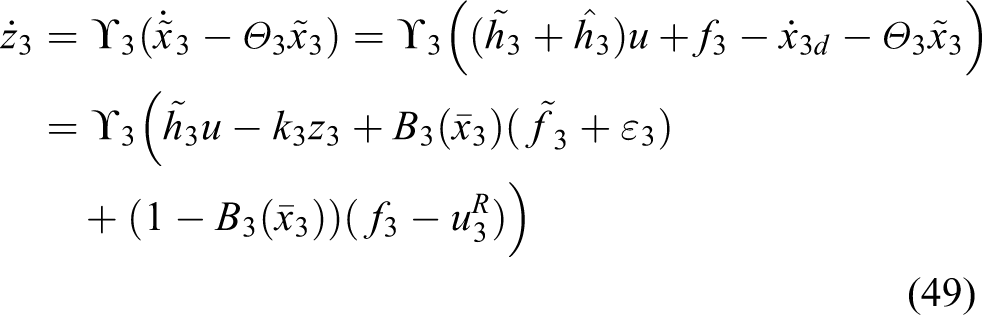
With the aid of the switching function
Stability analysis
To perform the analysis of stability and convergence, let us select the Lyapunov function candidate

where



According to the definition of

where
Based on the virtual control, equations (26) and (36) together with assumption 1, there is the formula as follows

where
Taking the derivative of L1, we have

where

Using the Young inequality and adaptive laws (29) and (30), we have
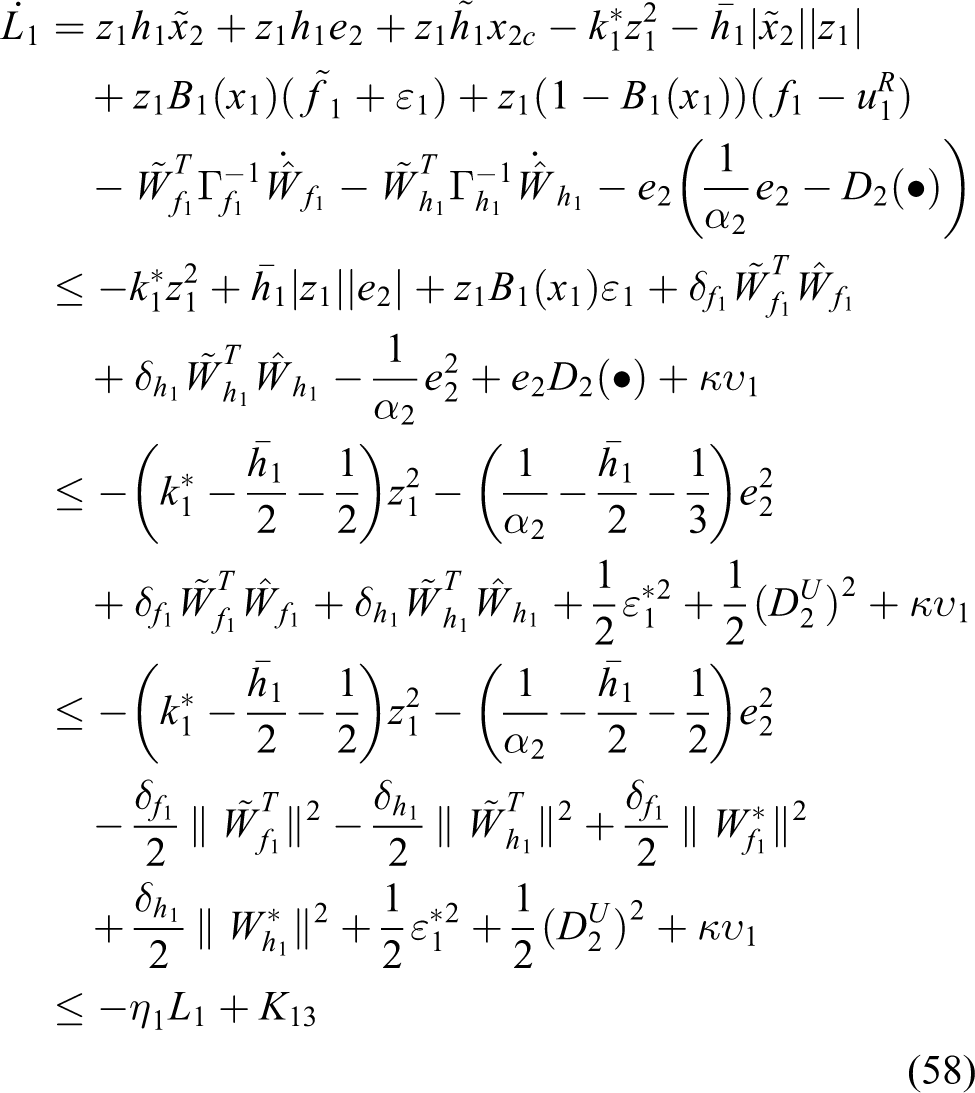
where
Take the derivative of L2
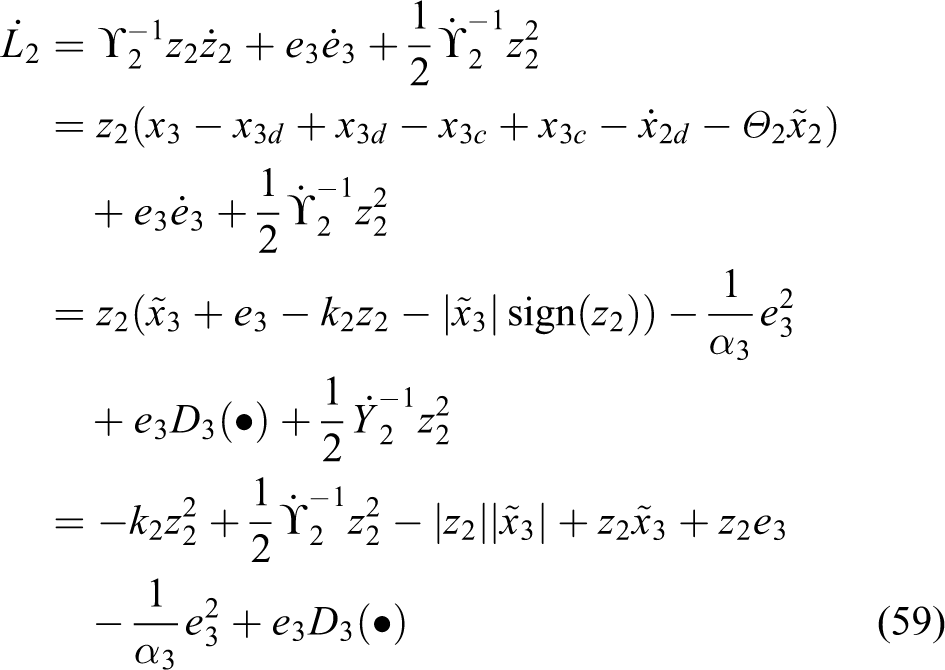
where

where
The derivative of L3 is as follows
where

where
Eventually, the derivative of L is as follows

where
Remark 1
Let

and

Summarizing the above analysis, It is concluded that the constrained tracking control of the HFV can regulate the transformed tracking errors to be arbitrarily small by increasing the control gains
Simulation studies
The comparison simulation study is carried out to verify the design we identified above is feasible, and a general model of HFV is used for simulation.
The initial cruise condition of the vehicle is set as
The FPA command parameters are chosen as
The PID controller is designed for velocity subsystem, and the parameters are chosen as

where eV represents the velocity error.
The control gains for the DSC are chosen as
The tracking performance results for the altitude and velocity of HFV shown in Figures 2 and 3 are desirable, and Figures 4 to 6 demonstrate that the states are all bounded. Furthermore, Figure 7 shows the tracking errors, while its predefined performance bounded by decaying functions of time is also desirable. In the presence of unknown dynamic, the proposed control scheme for HFV can guarantee predefined tracking performance.

Tracking performace of altitude subsystem (without predefined performance).

Tracking performace of altitude subsystem (with predefined performance).

Tracking performace of altitude.

Tracking performace of velocity.

Bounded tracking performace.
Conclusion
In this work, a global adaptive neural controller with guaranteed tracking performance is designed for HFV. The new view of this article is that a smooth switching algorithm is employed, by which adaptive neural controller and robust controller cooperate to ensure the system GUUB. Moreover, the developed global adaptive neural control can also improve the tracking performance by introducing an error transformation mechanism. Simulation results have shown clearly that the superior performance of our design.
Footnotes
Authors’ note
Chenguang Yang is also affiliated with Zienkiewicz Centre for Computational Engineering, Swansea University, SA1 8EN, UK.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by National Nature Science Foundation (NSFC) under Grant 61473120, Guangdong Provincial Natural Science Foundation 2014A030313266 and International Science and Technology Collaboration Grant 2015A050502017, Science and Technology Planning Project of Guangzhou 201607010006 and the Fundamental Research Funds for the Central Universities under Grant 2015ZM065.