
Abstract
This article concentrates on the attitude control problem for the lifting re-entry vehicle with non-minimum phase property. A novel attitude control method is proposed for this kind of lifting re-entry vehicle without assuming the internal dynamics to be measurable. First, an internal dynamics extended state observer is developed to deal with the unmeasurable problem of the internal dynamics. And then, the control scheme which adopts output feedback method is proposed by modifying the traditional output redefinition technique with internal dynamics extended state observer. This control scheme only requires the system output to be measurable, and it can still stabilize the unstable internal dynamics and track attitude commands. Besides, because of the inherent property of extended state observer in rejecting uncertainties and disturbances, the control precision of the proposed controller is higher than the controller designed with traditional output redefinition technique. Finally, the effectiveness and robustness of the proposed attitude controller are demonstrated by the simulation results.
Introduction
Re-entry vehicle has attracted much interest because of its high speed and penetration capability over the past few decades. During re-entry, the vehicle undergoes rapid changes in aerodynamic properties as the Mach number decreases, which presents challenges to the attitude control. The nonlinearity and strong couplings in three channels make it more difficult to design an efficient attitude controller. 1 In this article, we study the attitude control problem of lifting re-entry vehicle (LRV). Such kind of LRV is equipped with reaction control system (RCS) and body flaps (elevons) for control. But during a certain phase of re-entry flight, attitude control has to be accomplished using only two body flaps. Furthermore, the reliance on the RCS also increases the load of the LRV because of the extra need for RCS propellant. We are especially concerned with the attitude control problem in the flight phase where only the two body flaps are available for the control. The attitude system will transform between minimum phase system and non-minimum phase system if only two body flaps are available for control. And the minimum phase attitude control problem has already been solved by adopting traditional nonlinear control methods. 2 However, the aileron reversal effect makes the attitude system a strong non-minimum phase system. 3 If we apply the feedback control methods to attitude controller design directly, the control system will fail because of the divergence of the unstable internal dynamics. The non-minimum phase property limits the application of many control methods, like feedback linearization, 4 sliding mode 5 and so on. The attitude controller of such kind of LRV must be able to suppress the divergence of the unstable internal dynamics. 6 Therefore, in order to solve the attitude control problem, both the internal dynamics stabilization problem and output tracking problem must be solved. Furthermore, the internal dynamics is unmeasurable from the output, which must be considered in the controller design.
Currently, the control problem of the nonlinear non-minimum phase systems has been numerously studied, 7,8 while the attitude control methods for LRV with non-minimum phase property are relatively less and these methods can be divided into two schemes: output redefinition technique and system decomposition method. It is shown in the study by Isidori and Byrnes 9 that the nonlinear tracking problem may be solvable if there exist acceptable dynamics on a particular centre manifold. That is to say, the tracking problem for a nonlinear non-minimum problem can be rendered to be solvable by appropriately designing the internal dynamics. The output redefinition technique is proposed based on this idea. By designing a set of acceptable internal dynamics with output redefinition technique, the study by Gopalswamy and Hedrick 10 represents a method to stabilize the unstable internal dynamics and solve the output tracking problem of an affine nonlinear non-minimum system. This technique is investigated by many researchers extensively. Shtessel combines the output redefinition technique and the sliding mode control method so that the sliding mode control method can be applied to non-minimum phase system. 11 Based on the output redefinition technique, the study by Well and Wallner 12 presents an attitude controller for X-38 re-entry vehicle with non-minimum phase property. Shi applies the output redefinition technique 13 to the attitude control of hypersonic technology vehicle-2 whose attitude motion also appears the non-minimum phase property. The system decomposition control scheme divide the system into two subsystems: the minimum phase subsystem and the non-minimum phase system. And then, controllers for each subsystem can be designed with feedback linearization method based on the norm model. Nie et al. 14 proposed an attitude controller for non-minimum phase LRV by combining system decomposition scheme and dynamic inversion (DI) method. Wang et al. 15 modifies the performance of the above control system by introducing small gain theory into the control scheme so that the control error results from the ignorance of some nonlinear terms can be compensated with the controller. 15
The above attitude control methods can stabilize the unstable internal dynamics and track the attitude commands. However, they are all designed on the basis of state feedback strategy. Such a control strategy requires all states, including the internal dynamics, to be measurable, which is impossible for non-minimum systems whose internal dynamics is actually unmeasurable from the output. Therefore, the practical application of the above attitude control methods is limited. In order to overcome the mentioned limitation of the above control methods when applying them to practical problem, the method to obtain information about internal dynamics must be designed at first. And then, the current attitude controllers must be modified based on the designed method.
The method to obtain information about internal dynamics must be designed first to ensure internal dynamics is available for feedback. Professor Han presents this conclusion in his publication: as long as a signal has influence on the output, this signal can be observed with the information about output (and the derivatives of the output). Based on the above theory proposed by professor Han, the extended state observer (ESO) is proposed to observe disturbances and other unknown signals. 16 And because of the dihedral angle of the wing, there exists the dihedral effect in the lateral/directional channel of the LRV studied in this article. Thus, the sideslip angle (one of the internal dynamics) will inevitably influence the bank angle (one of the outputs). 17 Isidori 18 discusses the feedback controller design for a class of nonlinear non-minimum phase system. Only a set of variables (not the full state) of such kind of system is available for feedback. He figures out that the entire design problem becomes more demanding, in view of the need of including some kind of ‘state observer’ in the feedback architecture. As shown in the studies by Han 16 and Isidori, 18 the state observer is a feasible method to estimate those states or variables that are unavailable for feedback. And as explained above, the dihedral effect 17 makes it theoretically feasible to observe internal dynamics of LRV with ESO. 16
This article studies that the attitude control problem of LRV with non-minimum phase property under the condition of internal dynamics is unavailable for feedback. The major contributions of this article include the following:
An IDESO method is proposed to estimate the unmeasurable internal dynamics. To the best of our knowledge, this is the first attempt to solve the unmeasurable problem of the internal dynamics existing in the attitude dynamics of LRV. The effectiveness of the IDESO is guaranteed by the dihedral effect 17 and the fundamentals of ESO 16 method which is mentioned above.
Based on the information about internal dynamics observed by the IDESO, a control scheme that adopts the output feedback method is proposed for LRV with non-minimum phase property. This scheme only requires the system output to be measurable and it still maintains the control performance of state feedback controller designed with traditional output redefinition technique. Besides, because of the inherent property of ESO in rejecting uncertainties and disturbances, the control precision of the proposed attitude controller is higher than state feedback controllers.
Problem formulation
First, this section introduces the model of the re-entry attitude dynamics. And then, for the convenience of the controller design, the normal form of the model of attitude dynamics is deduced.
Model of reentry attitude dynamics
The LRV studied in this article is equipped with RCS and two body-flaps for control. We are in particular concerned with the flight phase where only two body flaps are available for control. Note that the definition of the variables is given in the nomenclature.
Firstly, the model representing re-entry attitude dynamics can be obtained based on the fundamentals of dynamics. 19 To streamline the analysis, the model of re-entry attitude dynamics is written in the following compact form

where

The angle of attack α and sideslip angle β are the Euler angle between the body coordinate frame

Illustration of α and β and outline of the LRV. LRV: lifting re-entry vehicle.
We can obtain the following aerodynamic model by linearly approximating the dependency of the aerodynamic moments on the states and controls about the trim condition

Note that we have neglected the damping derivatives. This is generally a valid assumption for a lifting body in the hypersonic flight regime because the damping derivatives are much smaller than dynamic derivatives. And then, the drift term
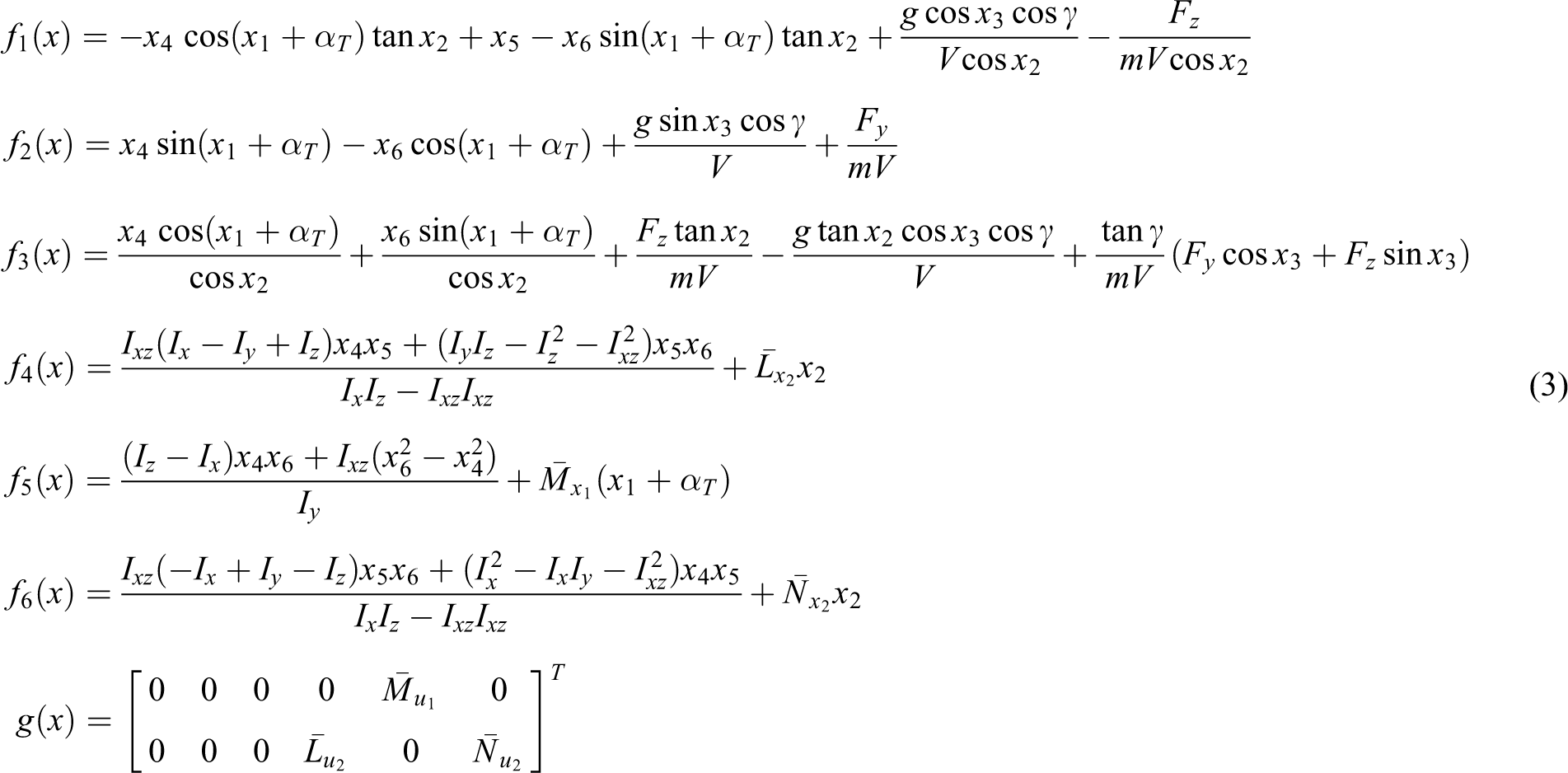
where

Based on output and equation (3), we can obtain the relative degree vector of system (1) is
Normal model of attitude dynamics
For the convenience of controller design, we need to transform system (1) into its normal form whose details can be obtained according the normal form theory introduced in the study by Isidori.
20
The transition to normal form is attained with a state transformation

where ξ, η denote external dynamics and internal dynamics, respectively. The normal form of system (1) can be expressed in the following form
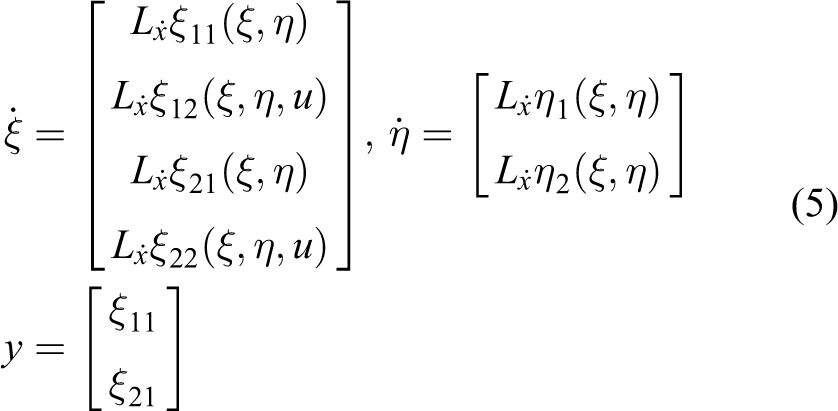
where

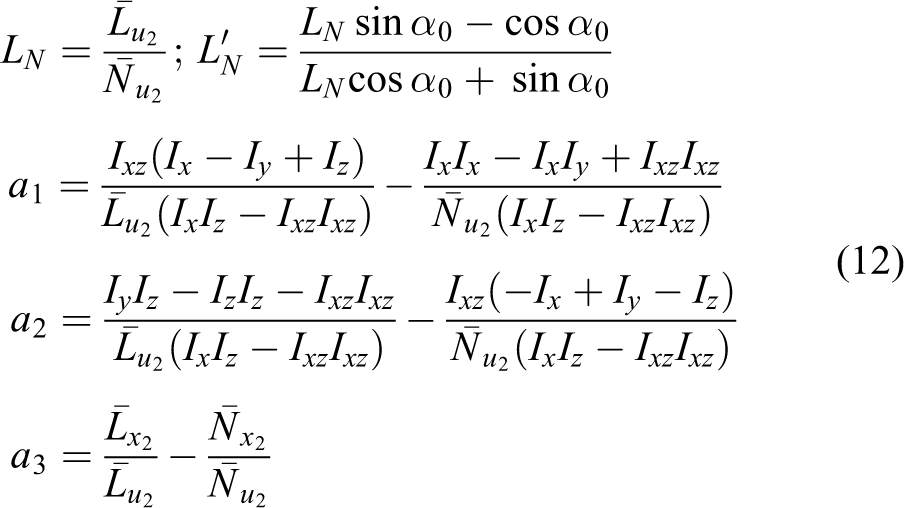
The stability of internal dynamics can be judged by calculating the criteria lateral control departure parameter (LCDP) for a certain flight condition. In order to obtain the LCDP, we need to linearize the dynamic equations of the lateral/directional channel of the LRV. Then, the transfer function relating the aileron to the roll rate can be expressed as follows 21

Now, we can define LCDP as follows 21

The parameters in equations (7) and (8) are aerodynamic coefficients, for example the CNβ denotes the coefficient of yawing moment to the sideslip angle.
The detailed deduction of equation (8) can be referred in the study by Fang et al. 17 We can see that LCDP term appears in the numerator of the transfer function, and as the LCDP < 0, one of the zero in the transfer function will be in the right hand plane, which means the system is a non-minimum phase system. Therefore, the internal dynamics is unstable. If we do not stabilize the internal dynamics with proper method, the internal dynamics will diverge and make the control system fail eventually.
There is some other prior knowledge need to be listed before the controller design. For a practical attitude control problem of LRV with non-minimum phase property, neither of the two internal dynamics can be measured directly from the output. But the angular velocity p, q and r can be measured with gyroscope, which makes it possible to obtain the internal dynamics η2 with the equation
Attitude controller design for LRV
The internal dynamics of non-minimum phase system are unstable. The stabilization of internal dynamics should be the first step to design controller for non-minimum phase system. Only if the internal dynamics are stabilized, the feedback control methods can be adopted to design controller for these systems. In this section, for the convenience of comprehension, the states are assumed to be available for feedback to design the state feedback attitude controller firstly. And then, the design of IDESO will be presented. With the information provided by the IDESO, we modify state feedback controller that is based on full-state feedback into an output feedback controller which only requires the output measurable. And the framework of the output feedback attitude controller is shown in Figure 2.

Framework of the output feedback attitude controller.
State feedback attitude controller design for LRV
In this part, we assume all states, including the internal dynamics, are measurable. Then, the attitude controller is designed with output redefinition technique and DI method. The output redefinition technique proceeds in three steps: (1) represent system dynamics in normal form, (2) reduce relative degree by the modifying output and (3) redefine the output to stabilize the internal dynamics.
Step 1: It has already been discussed in ‘Problem formulation’ section. We only introduce steps 2 and 3 here.
Step 2: Define

Now, the

where

and
If y* tracks the desired value

Step 3: Redefine the system output as

Thus, the desired output is


To streamline the analysis, define a new matrix K as follows

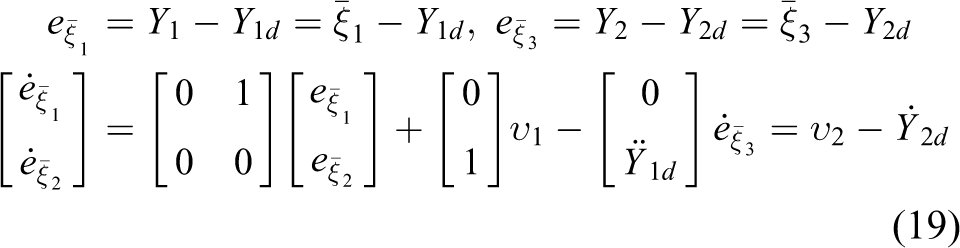
From equations (11), (13) and (14), the error system between the true value and desired value of the internal dynamics is

The stabilization problem of the original internal dynamics (which is uncontrollable) is transformed into the stabilization problem of the error system (16) (which is controllable) of the new internal dynamics. As long as K is designed to make (PK + Q), a Hurwitz matrix, the internal dynamics is stabilized. In this article, we choose
For a bounded command signal
Based on equation (17), we can design the following pseudo control vector

where

where

Based on the above processing, the attitude controller can be finally obtained with DI method

Output feedback attitude controller design for LRV
This controller (13) can stabilize the unstable internal dynamics and track the attitude commands as long as all the states are available for feedback. But internal dynamics η1 is unmeasurable for a practical flight attitude control problem. In order to solve the above problem, an IDESO is designed by utilizing the coupling (results from the dihedral effect) between the output and internal dynamics. And then the controller (13) can be modified with the information about the internal dynamics provided by the IDESO. Finally, an output feedback attitude controller which only requires the output to be measurable is obtained.
Estimating equation of internal dynamics
Because the value of internal dynamics η1 cannot be obtained directly from the output, an equation to estimate the true value of η1 is needed for the design of IDESO. Thus, we design the estimating equation based on the output and the derivatives of the output. The result obtained with this estimating equation will be treated as the input of the IDESO which is shown in the following equation (24). Based on the above analysis, the expression of

where

Based on equation (14), a new variable yη can be defined as follows

Thus, η1 can be estimated by equation (15), that is to say we have the following expression

Observer of output derivative
As shown in equation (15),

where

ESO of internal dynamics
According to the research by Han, 16 as long as a signal can influence the system output, the signal can be observed from the information of the output and the derivative of the output. Because of the dihedral effect, the system output x3 will be inevitably influenced by the internal dynamics η1 = β, which makes the ESO method applicable to estimate the internal dynamics. Hence, we adopt ESO method to solve the unmeasurable problem of internal dynamics η1.
Note that both the information of η1 and

In order to obtain the information of

Based on equations (15), (17) and (19), the IDESO can be designed as follows

where
Output feedback attitude controller for LRV
Based on

where
Then, the state feedback controller (20) can be modified with IDESO (27) and pseudo control (28). In order to express the output feedback controller in a more compact form, we introduce a new set of variables before the modification of the state feedback controller (20)

Now the attitude controller (20) can be changed into the following output feedback controller

The matrices A and B can be obtained by substituting x2 with
So far, a new control scheme is established and its block diagram is shown in Figure 2. And this new control scheme does not require any additional design principles. The design principles of all the design parameters, like k and
Simulations
This section presents simulation results based on the nonlinear model of the LRV. This section consists of three parts: in the first part, we demonstrate the convergence of the IDESO. In the second part, the effectiveness of the proposed attitude controller is demonstrated by comparing the performance of the proposed controller with the traditional attitude controller. And in the third part, we demonstrate that the proposed controller is robust to the aerodynamic uncertainties with Monte Carlo simulation. The simulation condition is given in Table 1.
Initial condition for simulation.

And the command of α is set to be 16° and the command of φv is set to be 30°. Under this flight condition, we can obtain LCDP = −0.0125, which means the internal dynamics η is unstable. Thus, system (1) is a non-minimum phase system. 21
Validation of the convergence of internal dynamics ESO
The IDESO needs an initial value to start the observation. But the true value of η1 cannot be obtained. Thus, we have to start the observation based on an appropriate initial guess. In order to guarantee the robustness of the proposed controller, the ESO must be able to converge to the true value with different initial guesses. Based on the above analysis, we assume the initial value of sideslip angle as 0°, ±1°, ±2° and ±3°. And the true value of β0 is 0°. The responses of the ESO and the outputs (angle of attack α and bank angle φv) in such four cases are presented in Table 2 and Figures 3 and 5.
The effect of different β0 to the convergence of IDESO and control performance.

IDESO: internal dynamics extended state observer.
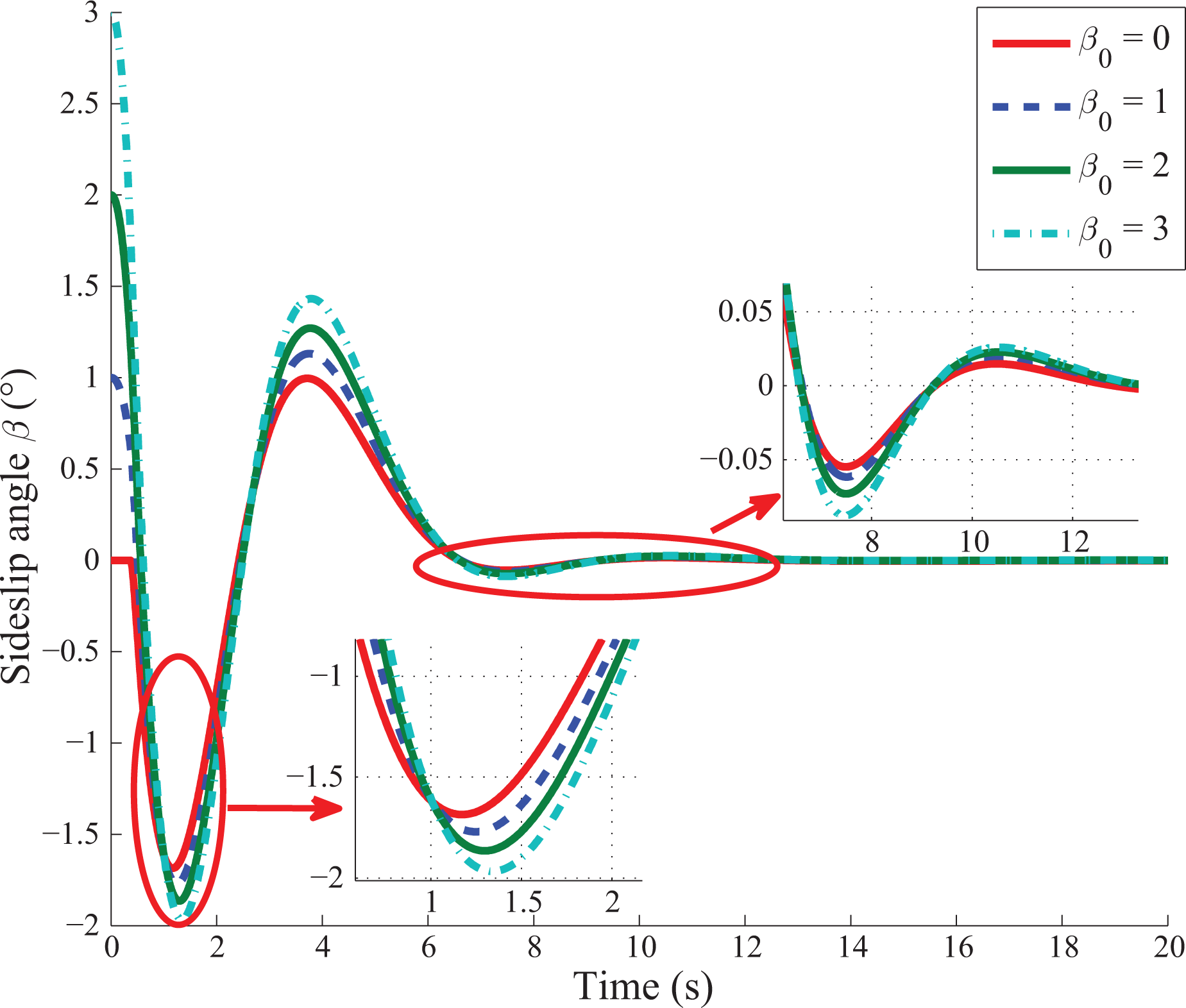
Response of IDESO with positive β0. IDESO: internal dynamics extended state observer.
Note that the overshoot in Table 2 denotes the error between the peak value and the steady value. And the undershoot is the error between the negative peak value and initial value. And the criteria of settling time is 5%.
We can obtain the following conclusions:
The effect of the initial guesses to the convergence of IDESO: As shown in the second column of Table 2, if the initial guess error increases every 1°, the overshoot of the observation result of IDESO will approximately increase by 0.1°, which means the larger the initial guess error is, the larger the overshoot of the response of ESO will be. But the amplification is very small. Thus, the results shown in Figure 3 and Table 2 prove that the convergence of the IDESO is robust to the initial guess error. The response of IDESO with negative β0 is shown in Figure 4. The conclusions obtained from Figure 4 are similar to Figure 3.
The effect of the initial guess to the control performance: the initial guess of β0 has more significant influence on the lateral/directional channel than the longitudinal channel. This conclusion can be obtained from Figure 5. This is owing to the dihedral effect (which can be described by the aerodynamic coefficient CLβ) existing in lateral/directional channel. Because of the dihedral effect, the error of sideslip will generate a hinge roll moment

Response of IDESO with negative β0. IDESO: internal dynamics extended state observer.

Response of angle of attack (α) and bank angle (φv).
In summary, the IDESO proposed in this article can converge to the true value and it is robust to the initial guess of the true initial value of η1. Moreover, the initial guess error has more significant influence on the lateral/directional channel than longitudinal channel because of the dihedral effect.
Validation of the effectiveness of the attitude controller
In order to verify the effectiveness of the proposed attitude controller (30), we compare the control results of the output feedback attitude controller (30) and the state feedback attitude controller (20). The following conclusion can be obtained from Figures 6 and 7 and Table 3: The response of output feedback controller is a little slower than the state feedback controller at the initial phase. The settling time of α and φv are 0.01 s and 0.035 s longer, respectively. This is because the IDESO needs some time to converge to the true value of η1. The overshoot of the system output is also a little bit larger when the system is controlled with the output controller. But both the delay time and overshoot are acceptable and they do not influence the control performance much. The tracking precision of output feedback controller is higher than the state feedback controller. Both controllers can track the attitude commands and stabilize the unstable internal dynamics of the LRV. As shown in Table 3, when the system is controlled with the output feedback controller, the steady state errors of α and φv are 0.067° and 0.94°, respectively. The steady-state errors with state feedback controller are 0.07° and 0.99°, respectively. This is because the simplifications in the controller design will inevitably introduce modelling errors into the control system. The state feedback controller cannot compensate these modelling errors. While the IDESO can observe the modelling errors and feed them back to the controller, the controller proposed in this article can compensate these modelling errors.

Response of angle of attack α.

Response of bank angle φv.
Comparison of the performance of two controllers.

Above all, the output feedback attitude controller proposed in this article maintains the control performance of the state feedback attitude controller designed with the traditional output redefinition technique. Moreover, it does not need to be designed based on the assumption that all states are measurable, while the state feedback attitude controller needs this assumption. Further, because of the inherent property of ESO in rejecting the uncertainties and disturbances, the precision of the proposed attitude controller is higher than state feedback attitude controller.
Note that the response of φv falls at first and then rises at the initial phase (0 s, 2 s), which is shown in Figure 7. This phenomenon results from the non-minimum phase property of system (1). The system with non-minimum phase property will appear a ‘undershoot’ response to a step signal. 6 As long as the input is a step signal, the transient response of non-minimum phase system goes towards the opposite direction of the step signal. This also demonstrates that system (1) is a non-minimum phase system.
The following conclusions can be obtained from Figures 8 and 9: Figure 8 shows that the proposed controller does not result in additional consumption of aero-surfaces. Figure 9 shows that the proposed controller can effectively stabilize the unstable internal dynamics and track the attitude commands.

Response of elevator (δe) and aileron (δa).
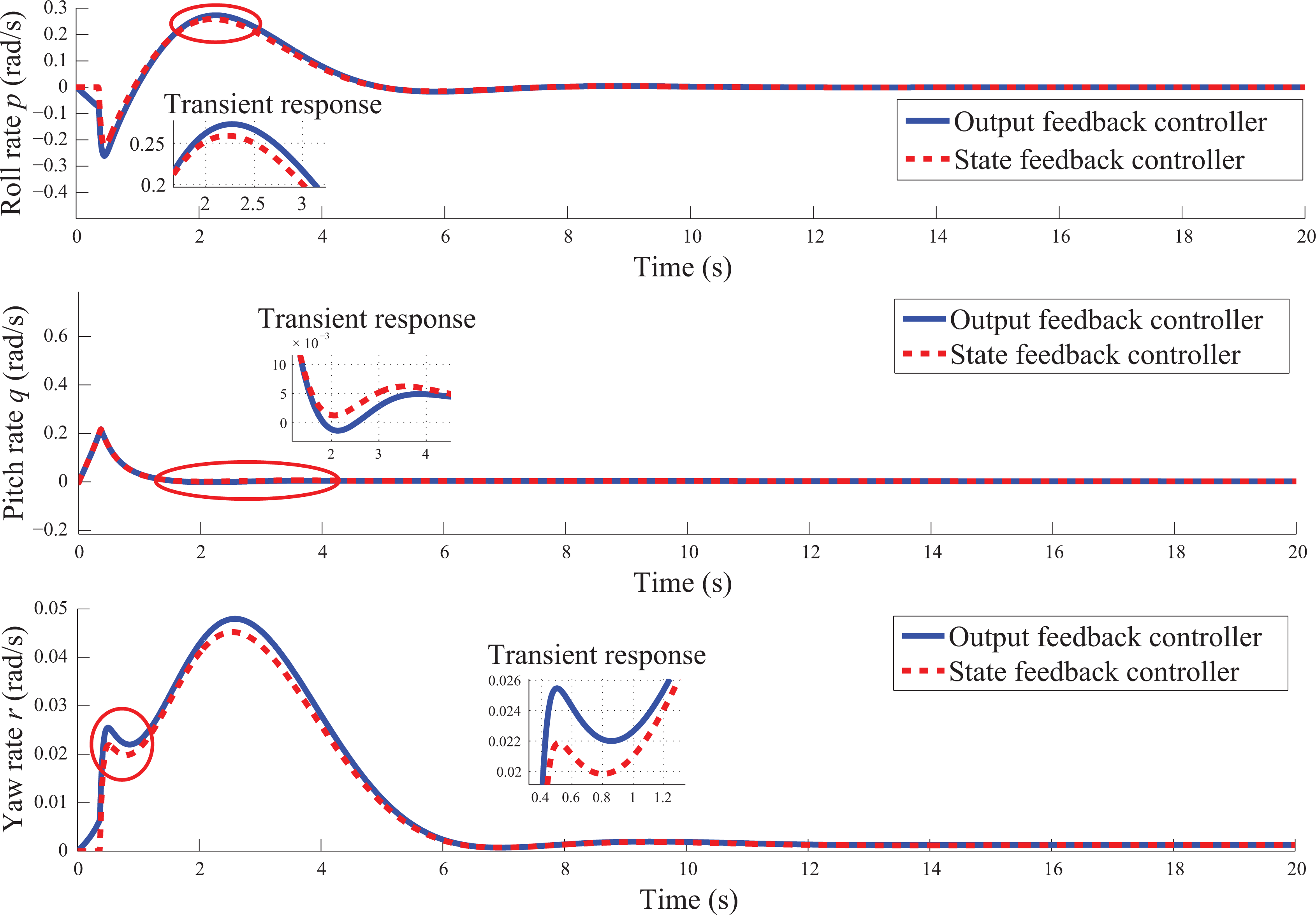
Response of roll, pitch and yaw rate.
In summary, the output feedback controller only requires the system output to be measurable, and it maintains the performance of state feedback attitude controller that is designed based on the assumption that all states are measurable. Furthermore, because of the inherent property of ESO in rejecting uncertainties and disturbances, the control precision of the proposed attitude controller is higher than state feedback controllers.
Validation of the robustness of the attitude controller
During re-entry, the aerodynamic coefficients cannot be obtained accurately. The robustness of the attitude controller will be challenged by the aerodynamic uncertainties. In this part, we design 1000 experiments to validate the robustness to aerodynamic uncertainties of the controller proposed in this article. And the coefficients of aerodynamic force and aerodynamic moment
From Table 4 and Figure 10, we can know that the aerodynamic uncertainties have more significant influence on the lateral/directional channel than the longitudinal channel. But the stability of the attitude is maintained. And from Figures 10 to 12, we can know that the proposed controller can stabilize the unstable internal dynamics and track attitude commands when the aerodynamic coefficients are uncertain. Table 4 shows that the worst case of each performance objective is acceptable. Thus, the robustness of the proposed attitude is demonstrated.
Worst case of control performance indexes.


Response of α.

Response of p, q and r.

Response of elevator (δe) and aileron (δa).
Conclusion
The research object of this article is the LRV with non-minimum phase property. And a novel observer-based control scheme is proposed to solve the attitude control problem for such vehicles. The traditional state feedback attitude controllers are designed based on the assumption that all states are available for feedback which is impossible for a non-minimum phase system. Based on the IDESO proposed in this article, we modify the state feedback controller that is designed with output redefinition technique and DI method. Then, an output feedback attitude control method which does not depend on the assumption that all states are available for feedback is proposed. This controller maintains the performance of state feedback controller in stabilizing the unstable internal dynamics and tracking the attitude commands. Furthermore, because of the inherent property of ESO in rejecting disturbances, the control precision of the proposed controller is higher than state feedback controllers designed based on traditional output redefinition technique. Besides, the proposed controller is also robust to the aerodynamic uncertainties.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant 61174221.