
Abstract
Design of centralised disturbance rejection controllers for an highly interacting MIMO quadruple tank process is tedious. Recently, centralised disturbance rejection Fractional Order LQI (FOLQI) controller is designed for such system to meet the desired specifications with better performance than various disturbance rejection controllers that are available in the literature. In this paper, an optimisation problem is formulated to obtain the optimal parameters of FOLQI controller providing minimum control effort by applying various widely used heuristic methods like Cuckoo Search (CS), Accelerated Particle Swarm Optimisation (APSO) and FireFly (FF) algorithms. A detailed simulation study is carried out to compare the performance of the FOLQI and Integer Order LQI (IOLQI) controllers obtained by these heuristic algorithms under disturbance and parameter uncertainty conditions. From the simulation study it is inferred that (i) FOLQI controller provides better time domain specifications % Mp, ts and J in comparison to IOLQI controllers and (ii) FF tuned FOLQI and IOLQI controllers provide better robustness characteristics compared to CS and APSO tuned controllers.
Keywords
Introduction
The control system design plays a major role for an highly interacting non-linear Multi Input Multi Output (MIMO) system of various engineering domains like (i) in mechanical: fuzzy PID controller provides better set point tracking of twin-rotor system compared to conventional PID controller, 1 (ii) in electrical: optimal Linear Quadratic Gaussian (LQG) controller for AC/HVDC system to provide accurate state estimation and better reference signal tracking, 2 (iii) in signal processing: discrete time state space methodology for digital modelling and design of optimal PID controller using Linear Quadratic Regulator (LQR) for system with multiple time delay, 3 (iv) in aerospace: Hammerstein model based Model Predictive Control (MPC) is proposed for UAV to provide better real time target tracking under external disturbances and robustness characteristics, compared to conventional PID controller 4 and (v) in process control: developing decentralised PI controller for quadruple tank process. 5 In specific, controller design for MIMO system with non-minimum phase operating mode is a challenging task as it impose limitations for control bandwidth of linear feedback design.5–7 The complexity due to interaction effect is analysed by various methods along with decoupling algorithms proposed in Liu et al. 8 and Chen et al. 9 providing classification of different algorithms based on their characteristics/application domains and decisions about selecting centralised or decentralised type of controllers. Many researchers presented QTP as a laboratory bench mark system which exhibits the characteristics of an highly interacting MIMO system operating in both minimum and non-minimum phase operating conditions.5,10,11
For QTP, different conventional control schemes are presented by various researchers and some of them are: (i) control methodologies like decentralised PI, multivariable Internal Model Controller (IMC) and
On the other hand, few authors developed advanced control schemes for QTP and some of them are: (i) a nonlinear zero dynamic attack based on the Byrness-Isidori normal form representation along with Lyapunov analysis is presented for QTP working in non-minimum phase which ensures stealthy to the proposed attack until some of the tank became overflow or empty in the presence of uncertainty and small parameter variations condition,
16
(ii) the robust
Recently, Fractional Order (FO) calculus is employed in modelling and controller design for industrial applications. Few authors designed FO controllers for different class of systems and are as follows:
(i) FO-PID controller for magnetic levitation system providing better performance in terms of IAE, ISE, ITAE and control effort compared to integer order PID controller, 24 (ii) FO-PI/FO-PD controllers providing better suppression of limit cycle over conventional PID controller for servo plant with separable non-linearity,25–27 (iii) unified controller parameter expressions of FO controllers are derived for universal plant having complex coefficient plus fractional complex order derivative with dead time to meet desired frequency domain specifications, 28 (iv) FO adaptive controller gives better performance in terms of control effort than classical controllers for variable time delay process system, 29 (v) FO-PI along with conventional feedforward controller design using classical frequency domain approach for level control system provide better performance than conventional controllers along with feedforward controller in terms of settling time, overshoot and level tracking, 30 (vi) FO-Sliding Mode Controller (SMC) provides better performance characteristics like finite time convergence and reduced chattering effect in the presence of parameter uncertainties compared to conventional SMC 31 and (vii) dual mode adaptive FO-PI with feedforward controller resulting better performance than decentralised PI, Quantitative Feedback Therory (QFT) and SMC controller in terms of settling time, overshoot and ISE. 10
On the other hand, controller parameters are tuned using various meta-heuristic algorithms by formulating objective function with constraints. Some of them are: (i) building energy optimisation using grey wolf and butterfly optimisation algorithms reducing the annual energy consumption of an office building in Seattle weather conditions compared to PSO in terms of number of building simulations required and convergence rate,32,33 (ii) a novel hybrid forecasting model based on long short-term memory neural network and empirical wavelet transform decomposition along with CS algorithm are developed for digital currency time series to minimise the negative situation by increasing the forecasting achievement. These algorithms are tested by estimating digital currencies such as BTC, XRP, DASH and LTC for its improved performances, 34 (iii) a novel hybrid wind speed forecasting model is developed based on long short-term memory neural network decomposition method and grey-wolf optimiser. The proposed combined model has the capability to capture the non-linear characteristics of wind speed time series by achieving accurate forecasting performance than single forecasting models, 35 (iv) PSO and Harris Hawks Optimisation (HHO) algorithms based PID controller parameters design for attitude and altitude control of the quadrator in different geometrical paths are studied. It is observed that HHO based controller provide better response in terms of simplicity, flexibility and ability to search randomly by avoiding local optima, 36 (v) hybrid HHO-GWO based optimal path planning and tracking algorithms are employed to carry out the payload hold-release mission of UAV by avoiding obstacles which outperforms controller tuned using PSO and GWO, 37 (vi) various meta-heuristic approaches to tune optimal PID controller and their application/limitations are discussed in Joseph et al., 38 (vii) PID controller parameters obtained using improved CS algorithm gives better results in terms of peak time, overshoot and settling time compared to conventional CS and Particle Swarm Optimisation (PSO), 39 (viii) PID controller design for automatic voltage regulator system using CS gives better performance than PSO and Artificial Bee Colony (ABC) algorithms in terms of overshoot, settling time and steady state error, 40 (ix) combination of PSO and CS algorithms used to design PID controller for quadrotor system providing better efficiency in comparison to conventional CS and classical reference model in terms of ISE error, 41 (x) tuning of fuzzy controller’s membership function using FF algorithm for autonomous mobile robot for better actuator function 42 and (xii) LQI controller with optimal Q and R matrices tuned using GA 43 and bat algorithms 44 provide better result in comparison to conventional LQI controllers in both transient and steady state responses.
For QTP, few authors have presented various optimal controllers and are as follows: (i) PID controller tuned using GA provides better performance compared to PI/PID controllers tuned using IMC, PSO and Bacterial Foraging Optimisation (BFO) algorithms,
45
(ii) robust optimal decentralised PI controller based on non-linear optimisation provides improved bandwidth for specified stability margins and robustness against parameter uncertainty,
46
(iii) the robust
An optimal tuning of FOLQI controller parameters using CS, APSO and FF algorithms is employed for QTP under disturbance conditions.
These heuristic algorithms provide an optimal FOLQI controller parameters by solving the inequality constrained optimisation problem to minimise the control effort along with time domain constraints such as overshoot, settling time and steady state error.
Simulations are carried out for minimum and non-minimum phase operating modes of QTP under disturbance and parameter uncertainty conditions. The performance of FOLQI controller obtained by using various heuristic algorithms are compared and also to show the superiority of FOLQI controller, the results are compared with optimally tuned IOLQI controller using heuristic algorithms.
This paper is organised as follows: Section 2 show the physical construction, parameter descriptions and mathematical model of QTP. Section 3 explains the basics of LQI. The proposed optimisation problem with time domain constraints is shown in Section 4. Section 5 presents CS, APSO and FF heuristic algorithms used in this paper. Section 6 explains briefly about the simulation procedure and discuss the results in detail. Finally, Section 7 concludes the paper along with future research directions.
Description of QTP
Physical construction
The physical construction of the QTP is shown in Figure 1 which consists of four tanks with orifice, reservoir, two pumps, two directional control valves and four level sensors. Pump
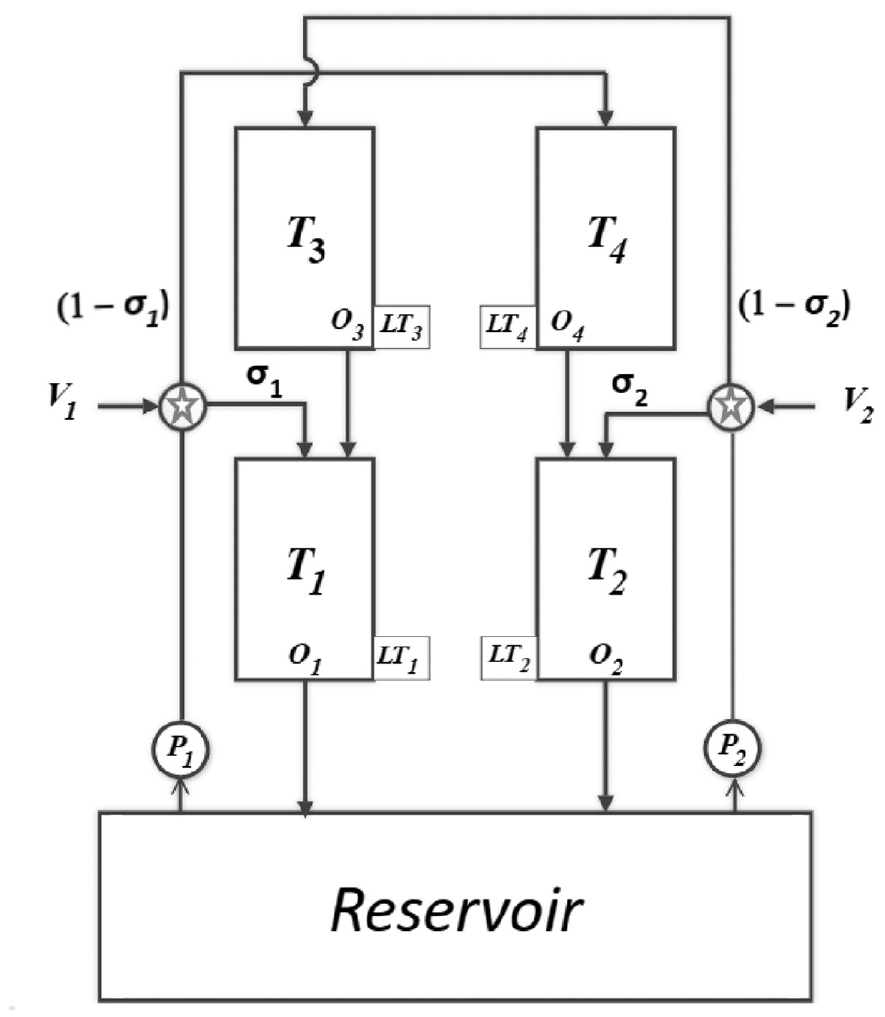
MIMO process configuration of QTP.
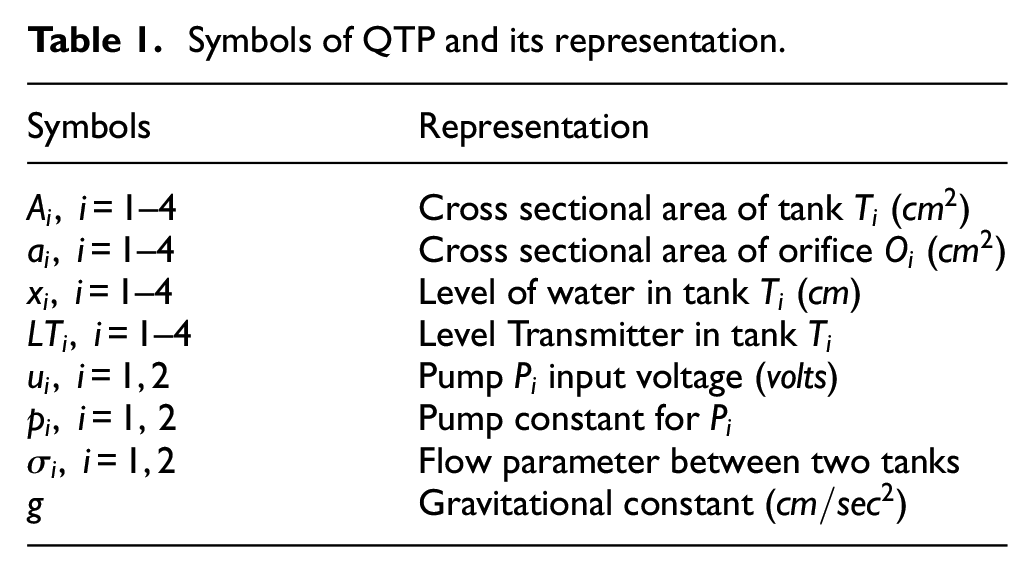
Symbols of QTP and its representation.
Mathematical modelling
The non-linear differential equations governing the mass balance for QTP 18 are described as:




The equilibrium inputs




Taylor series expansion is used to linearise the differential equations (1)–(4) around the equilibrium points (5)–(8). The linearised state space representation of QTP is given as:
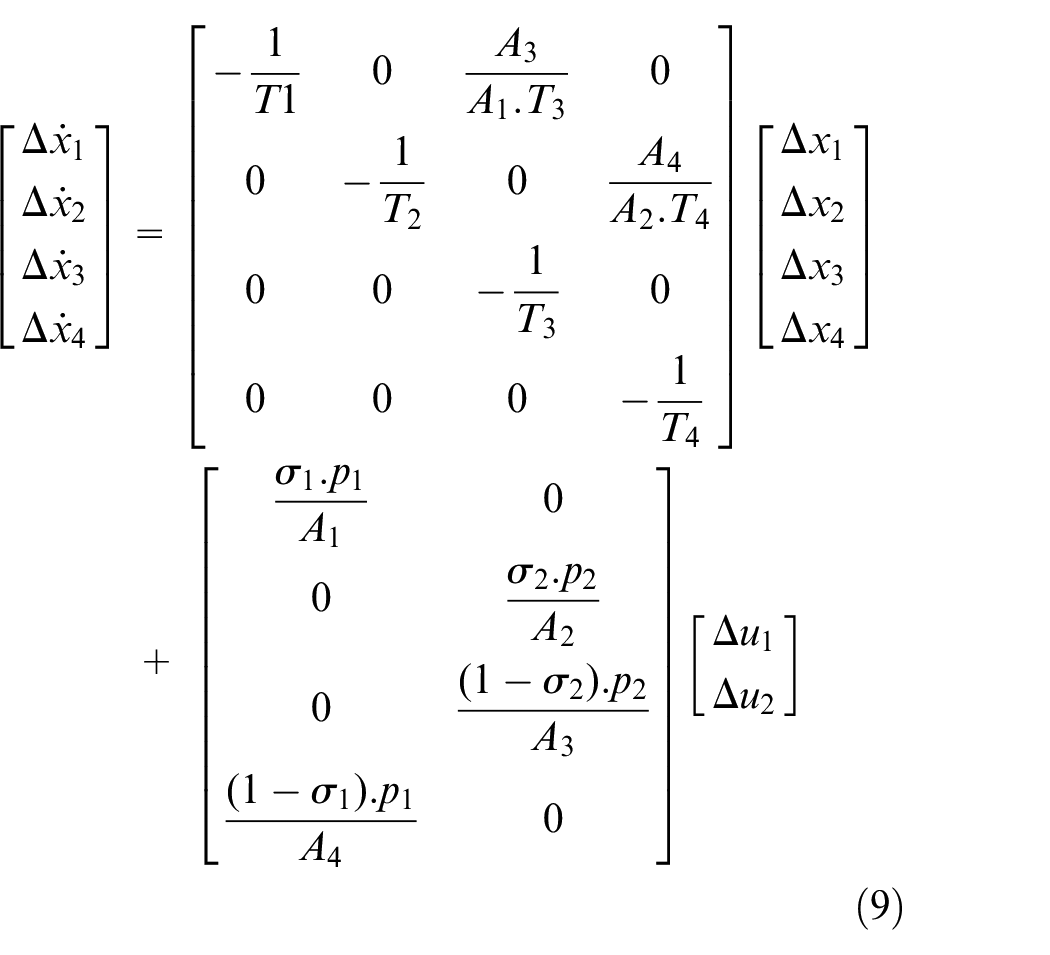
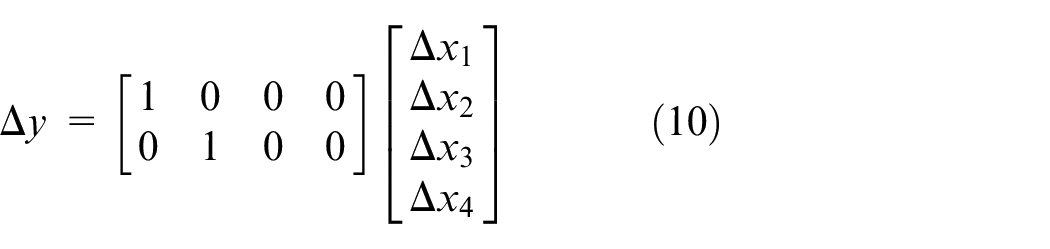
where,
Introduction to LQI
A preliminaries about LQI
32
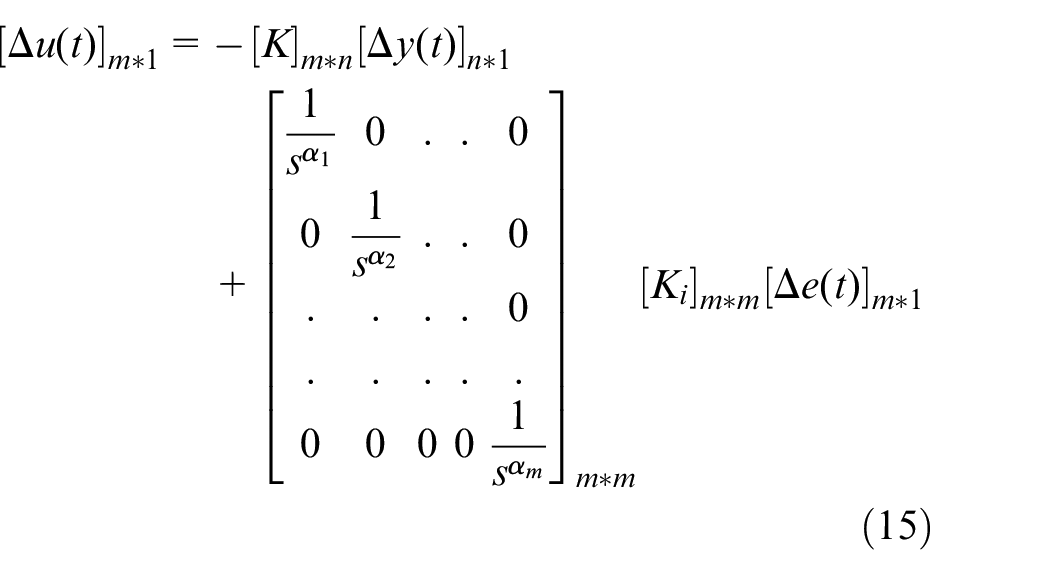
is presented in this section. In general, an optimal LQI controller is tuned by applying weightages on either or both control signal
State space equation:

Cost function:

where, the matrices

where,
Optimisation problem
The closed loop schematic representation of QTP with FOLQI controller tuned under continuous load disturbance is shown in Figure 2. The FOLQI controller parameters for QTP at given operating conditions are tuned by formulating an optimisation problem to meet the desired specifications with minimum control effort under continuous load disturbance
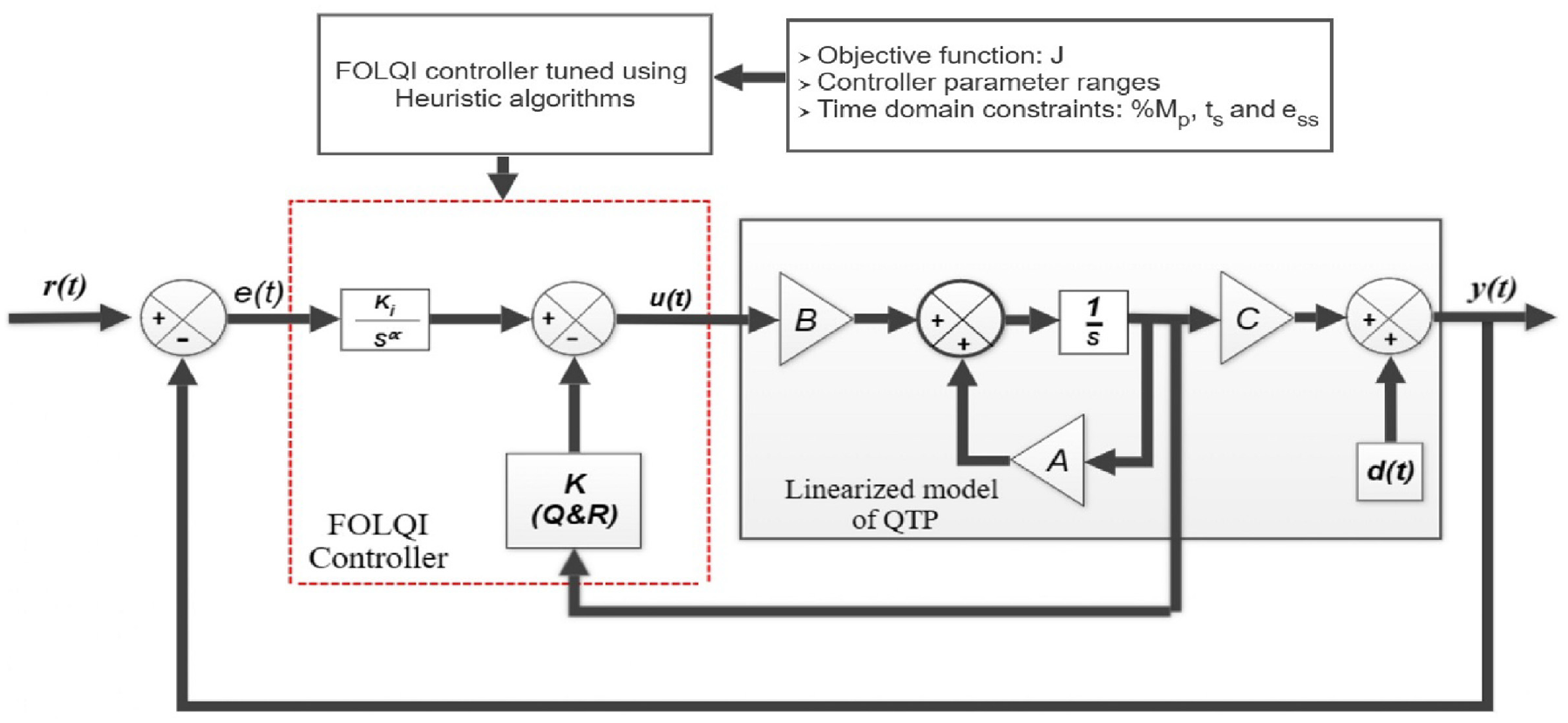
Closed loop configuration of QTP with FOLQI controller.
Cost function:

Subject to inequality constraints:
Overshoot / undershoot
Settling time
Steady state error
where,
where,
Heuristic algorithms
In this section, nature inspired meta-heuristic based algorithms such as CS, APSO and FF used for solving the proposed constraint optimisation problem given in Section 4 are discussed.
CS algorithm
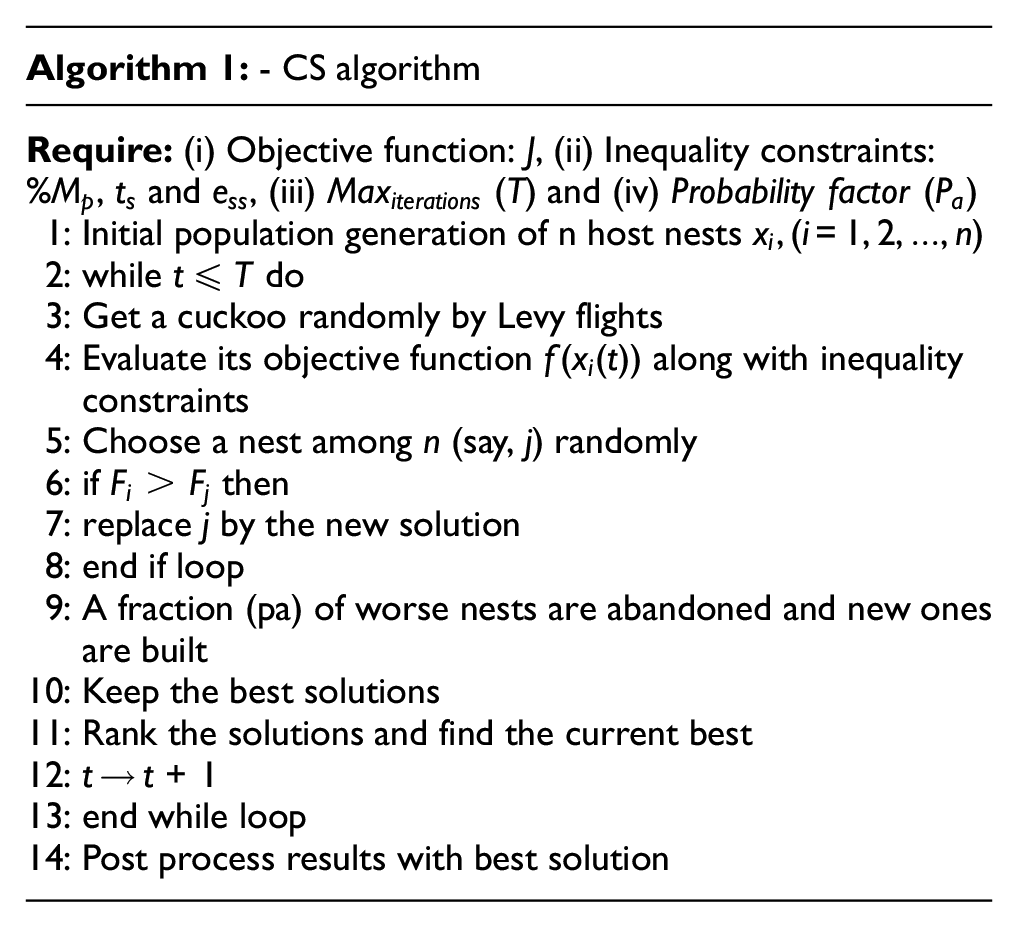
CS algorithm introduced by Yang and Slowik 49 in 2009 is based on obligate brood parasitic habitual of cuckoo birds and levy flight habitual of some birds/fruit flies. CS algorithm mimics the egg laying behaviour of cuckoo bird in other host birds nest. The egg which successfully gets hatched is considered to be best and travels to next generation. The technique that cuckoo birds use to search for nest and spawn is mathematically represented by levy flight mechanism. The host bird finds the egg and if it is not his own, it throws out the egg or moves to some other nest by leaving the cuckoo egg which fails to results in hatching. The three stages of CS algorithm are as follows:
Cuckoo lays egg only in one randomly selected nest at an instant.
Best nest with high quality of egg is considered to be success for moving to the next generation. The best egg/solution in the current generation is replaced by the best egg/solution in the next generation.
The number of host nest (n) is fixed and the probability of finding alien egg
The generated solution of the levy flight formulation is given as:

where, (
The pseudocode of CS algorithm is given as follows:
APSO algorithm
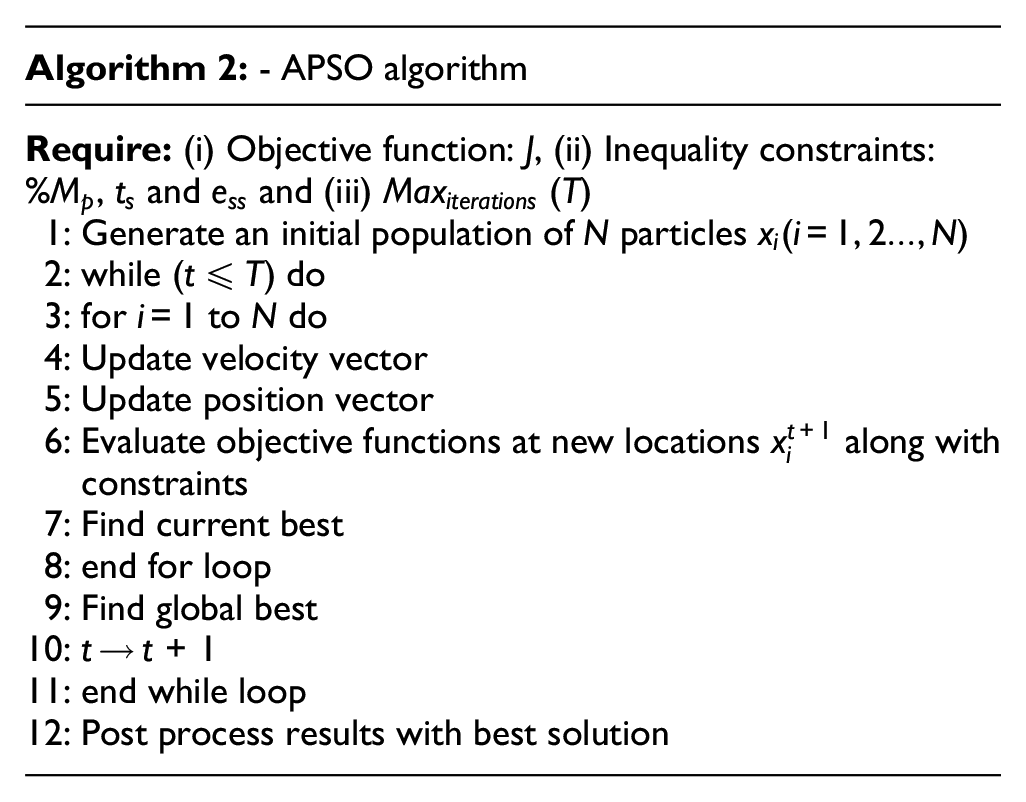
PSO algorithm is proposed by Kennedy and Eberhart in 1995. 50 This algorithm is inspired by the swarm behaviour of fishes and birds that follow while in search of food. Each bird is referred as particle in search space and it changes its flying characteristics following the particle which is nearer to its prey. APSO differs its function from PSO by avoiding calculation of individual best by introducing randomness in the initial guess which results in increased accuracy and fast convergence. 51
In this algorithm, velocity vector is computed during each iteration and the corresponding position is updated. The updated velocity and position vectors


where,
The pseudocode of APSO algorithm is given as follows:
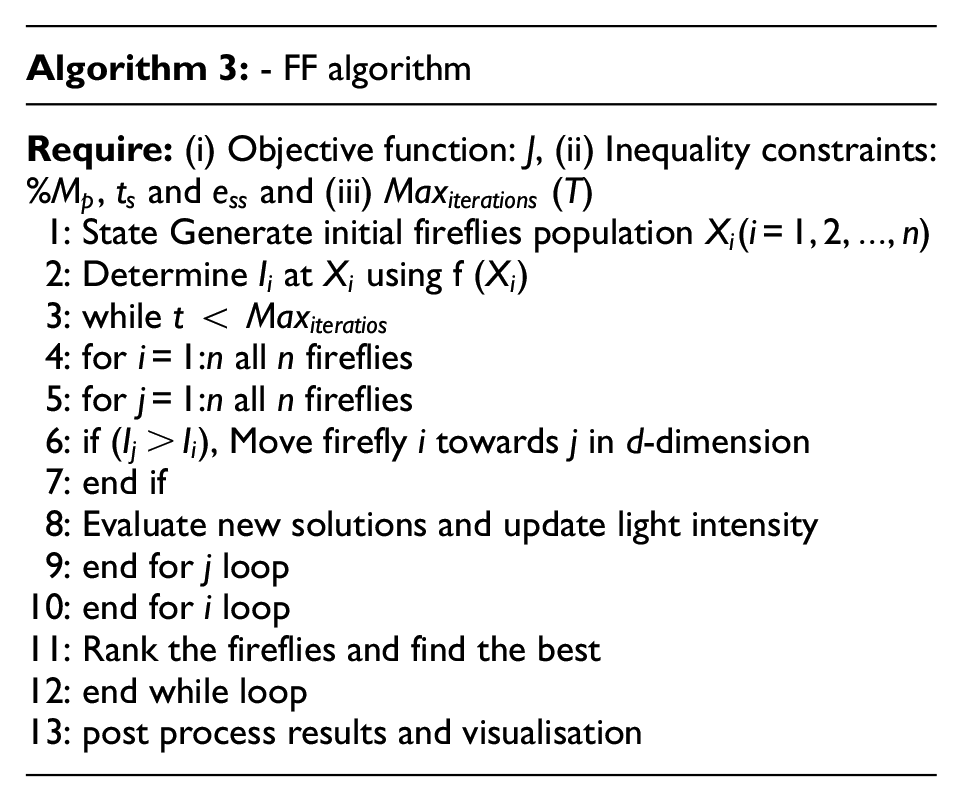
FF algorithm
FF algorithm is proposed by Yang and Slowik in 2008. 52 This algorithm is inspired by flashing behaviour of fireflies belonging to a particular species. The behavioural assumptions of fireflies are as follows:
Fireflies are unisex and attracted towards each other based on the intensity of light it produces.
Less intensity fireflies are attracted towards high intensity fireflies.
Intensity of the light increases when fireflies comes closer.
If both the fireflies have same brightness, they move randomly without attracting each other.
The relative movement occurring between less bright firefly and more bright firefly is represented as follows:

where,
The pseudocode of FF algorithm is given as follows:
Results and discussion
In this section, the heuristic algorithms CS, APSO and FF are used to tune the FOLQI controller parameters and the results are compared with IOLQI controller. To realise the FOLQI controller, the fractionality in the integrator is approximated to an integer order using oustaloup approximation of order five for the range of frequencies [0.001, 1000]
Parameters and equilibrium points of QTP.
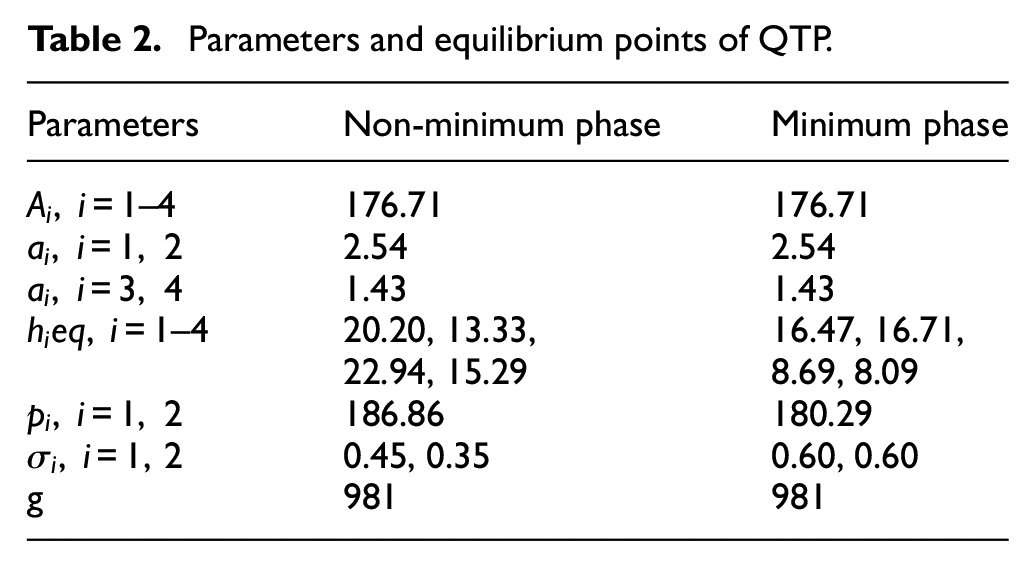
The FOLQI controller parameters are tuned to suppress the continuous load disturbance with minimum controller effort in addition to meet the desired constraints: less than 10% in
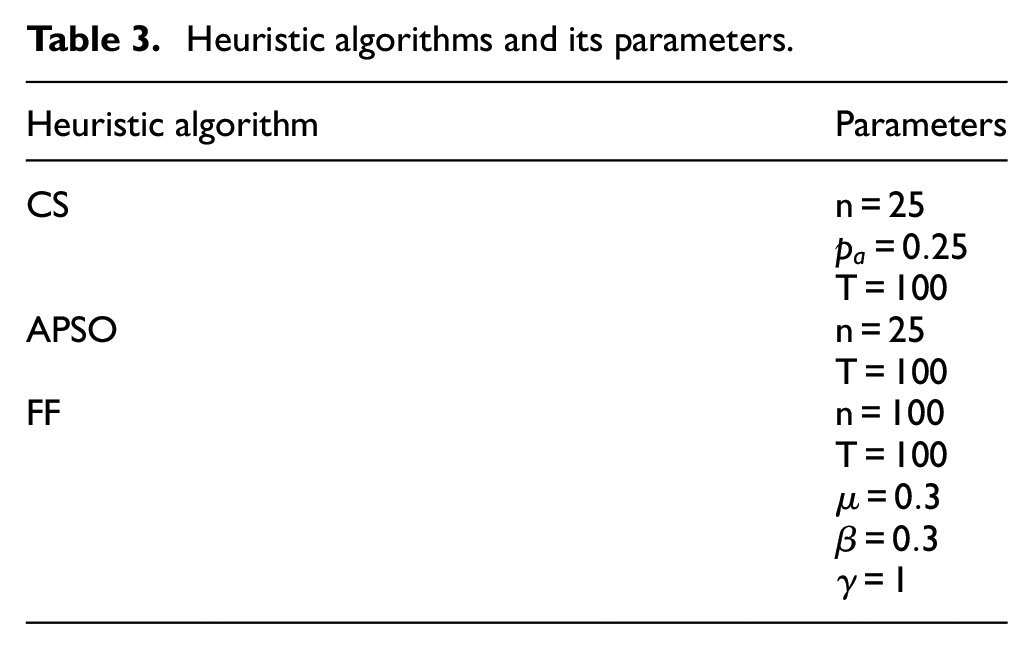
For optimisation, the parameters of CS, APSO and FF algorithms presented in Table 3 are chosen and
Heuristic algorithms and its parameters.
Converged controller parameters of IOLQI and FOLQI controllers.
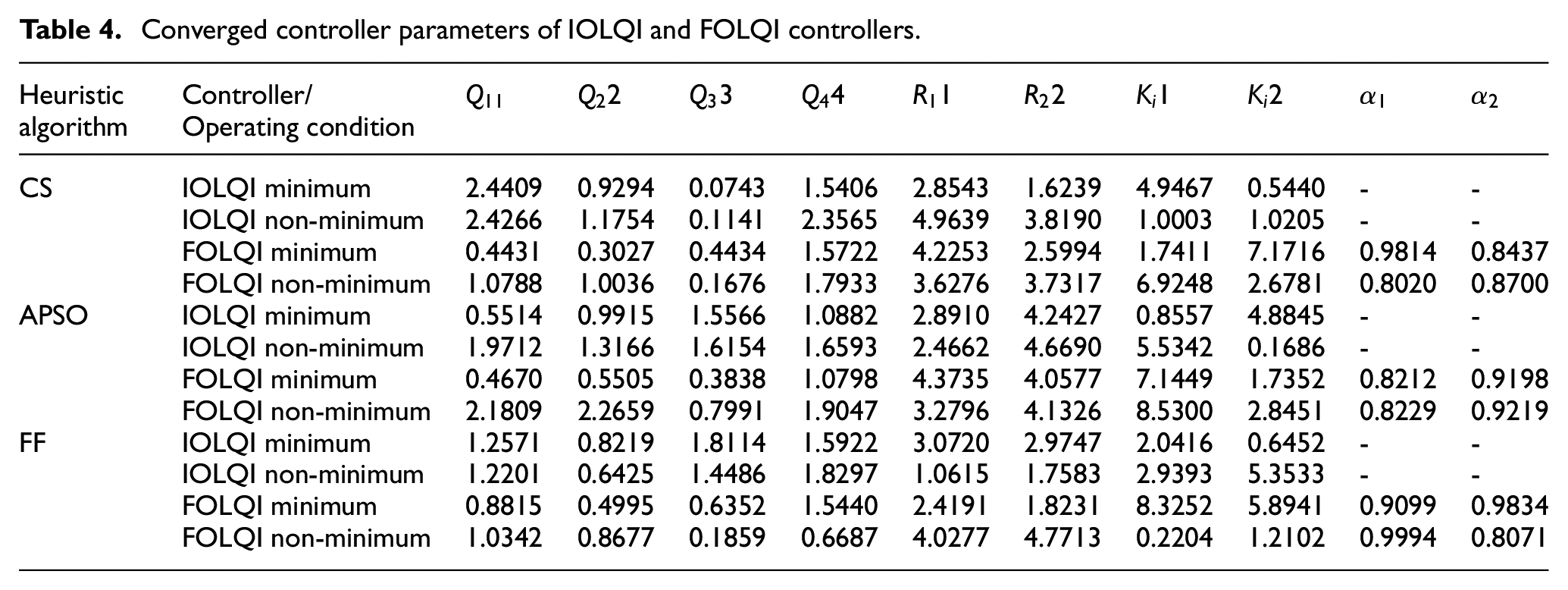
The convergence of objective function
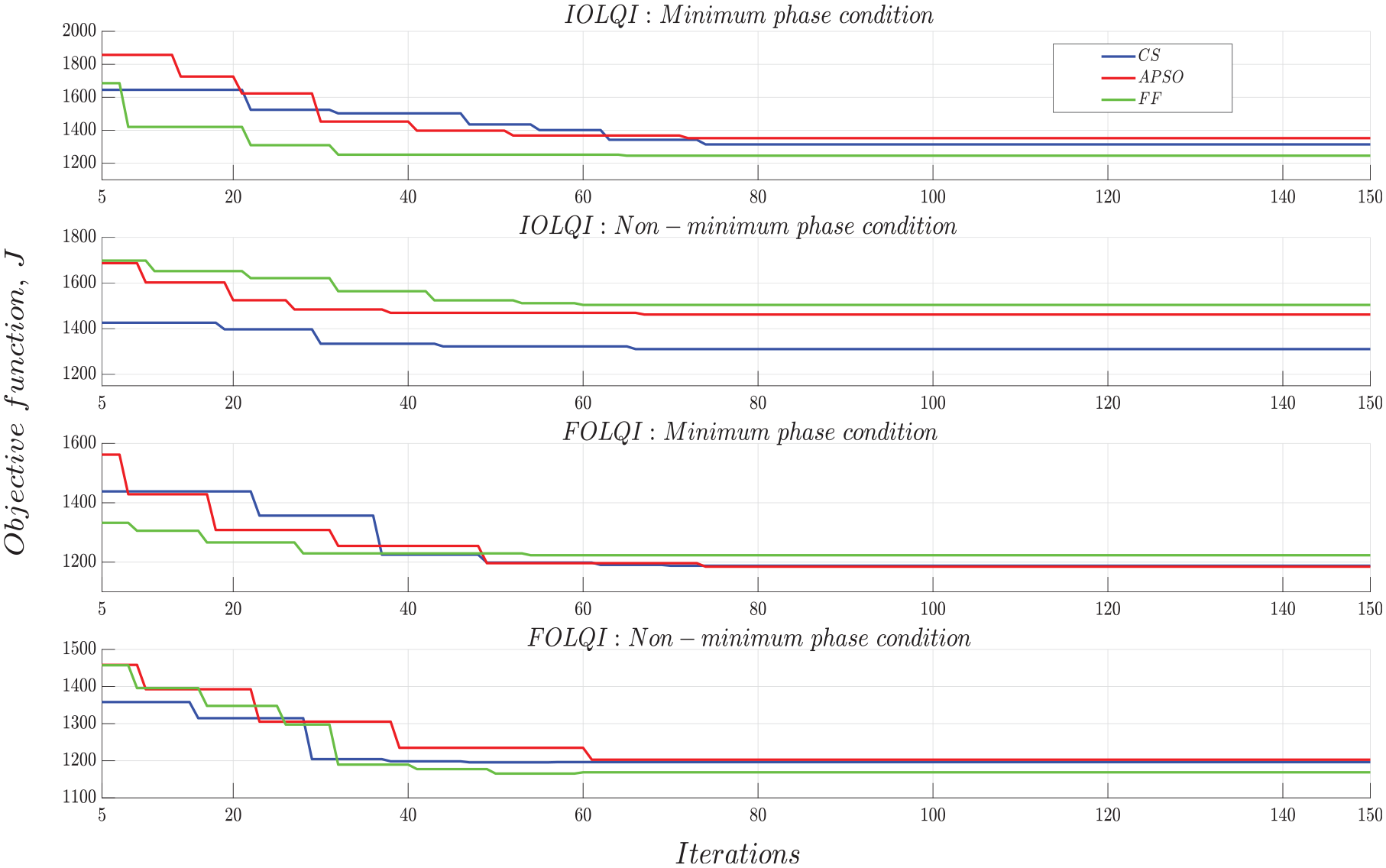
Convergence plot using CS, APSO and FF algorithms.
Convergence epochs and statistical index of CS, APSO and FF algorithms.
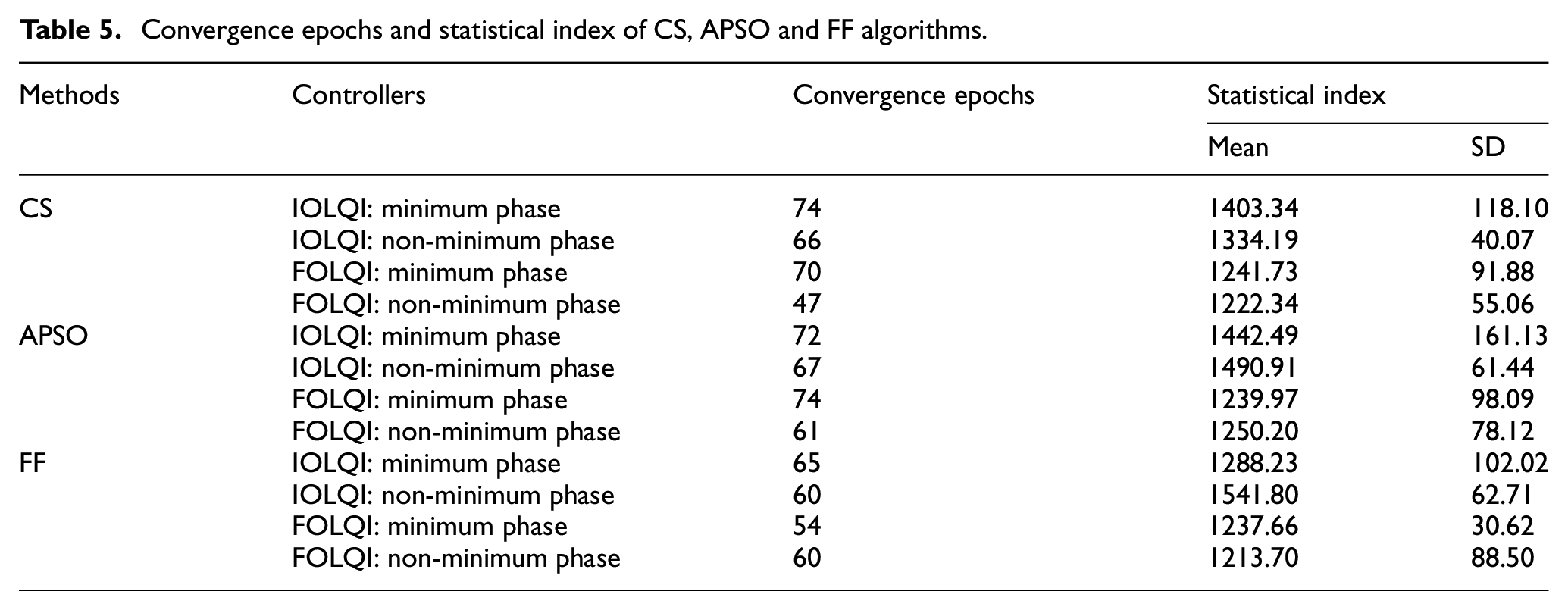
In general, the FF algorithm has both advantage and disadvantages compared to CS and APSO. FF algorithm takes long convergence time and has the characteristics to lock in local minima region. But proper selection of ranges for controller parameters will give the advantage of converging to best optimum point compared to CS and APSO. 52 We have made many trail and error to select the best controller parameter range which led FF algorithm to explore the best optimal controller parameter.
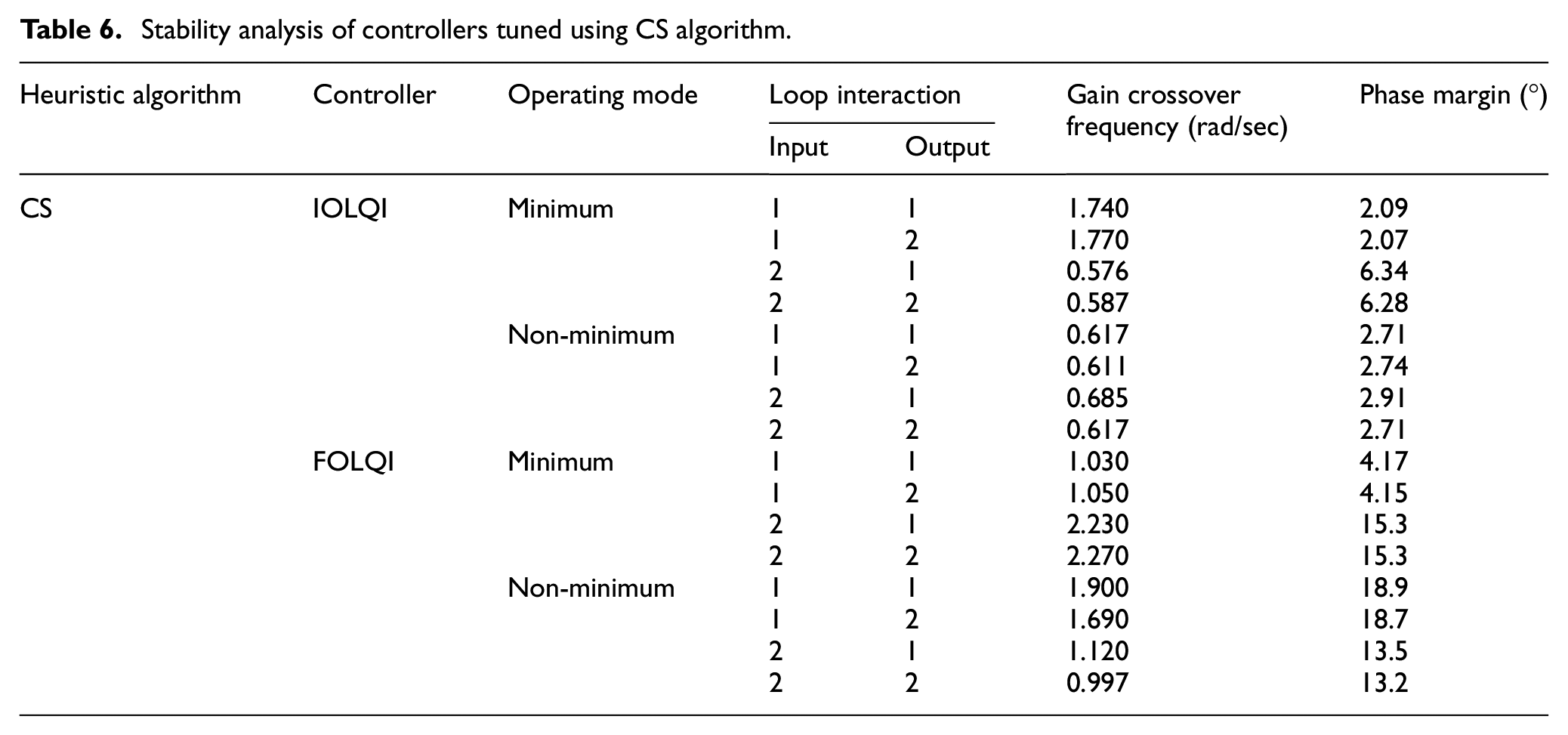
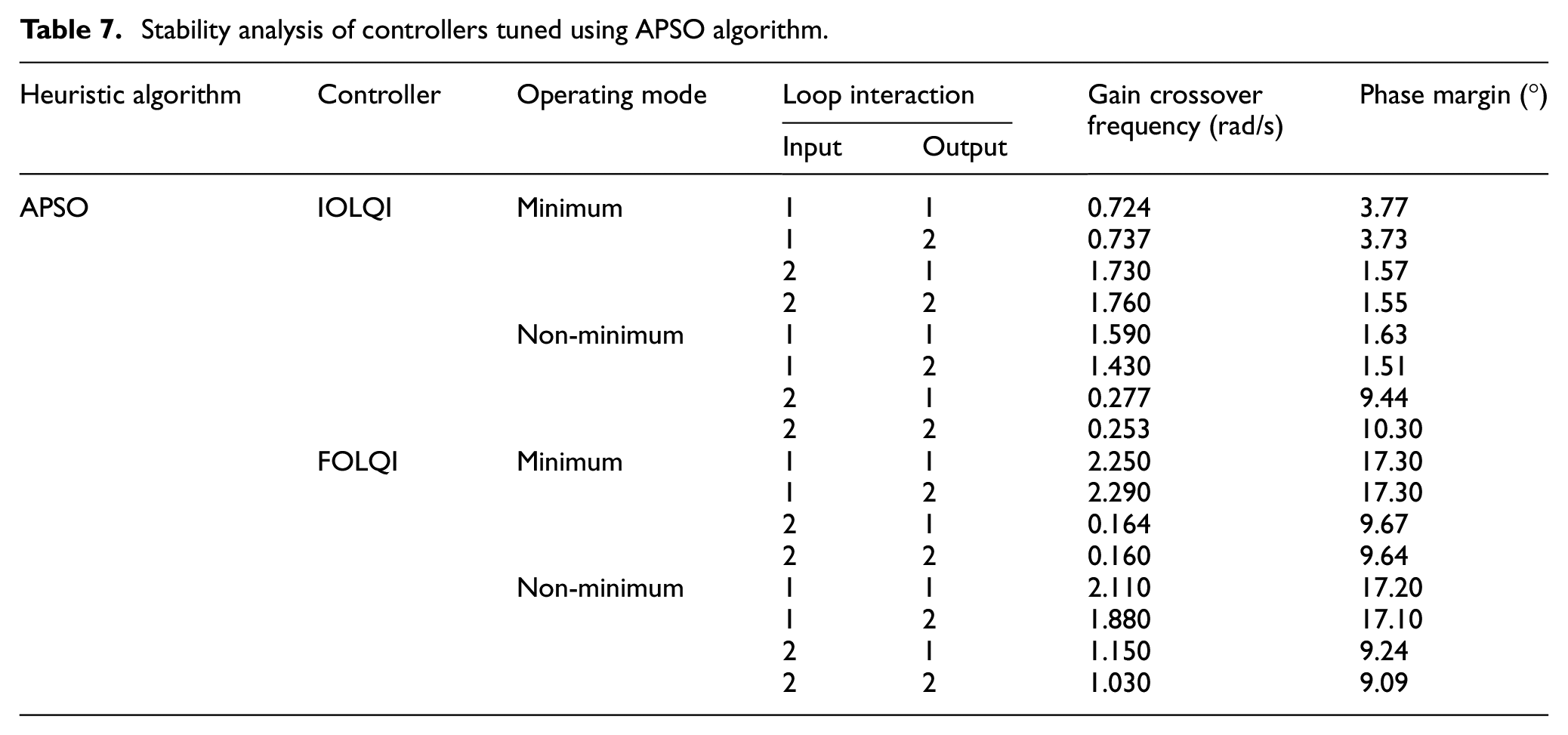
Stability analysis
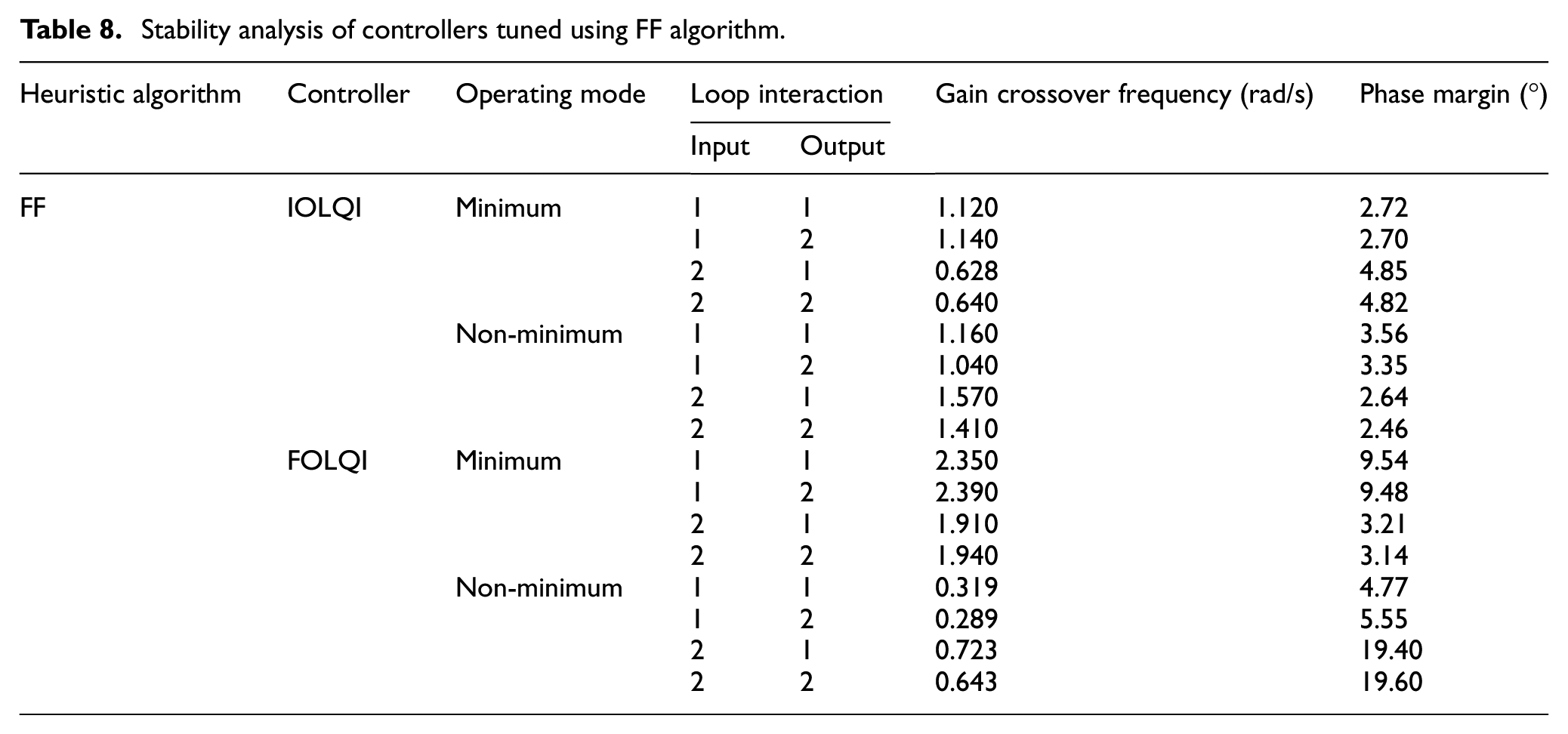
The stability analysis of QTP with the obtained IOLQI/FOLQI controllers tuned using CS, APSO and FF algorithms are studied using frequency response method. Tables 6–8 show that, gain crossover frequencies and phase margins for all the control loops are found to be
Stability analysis of controllers tuned using CS algorithm.
Stability analysis of controllers tuned using APSO algorithm.
Stability analysis of controllers tuned using FF algorithm.
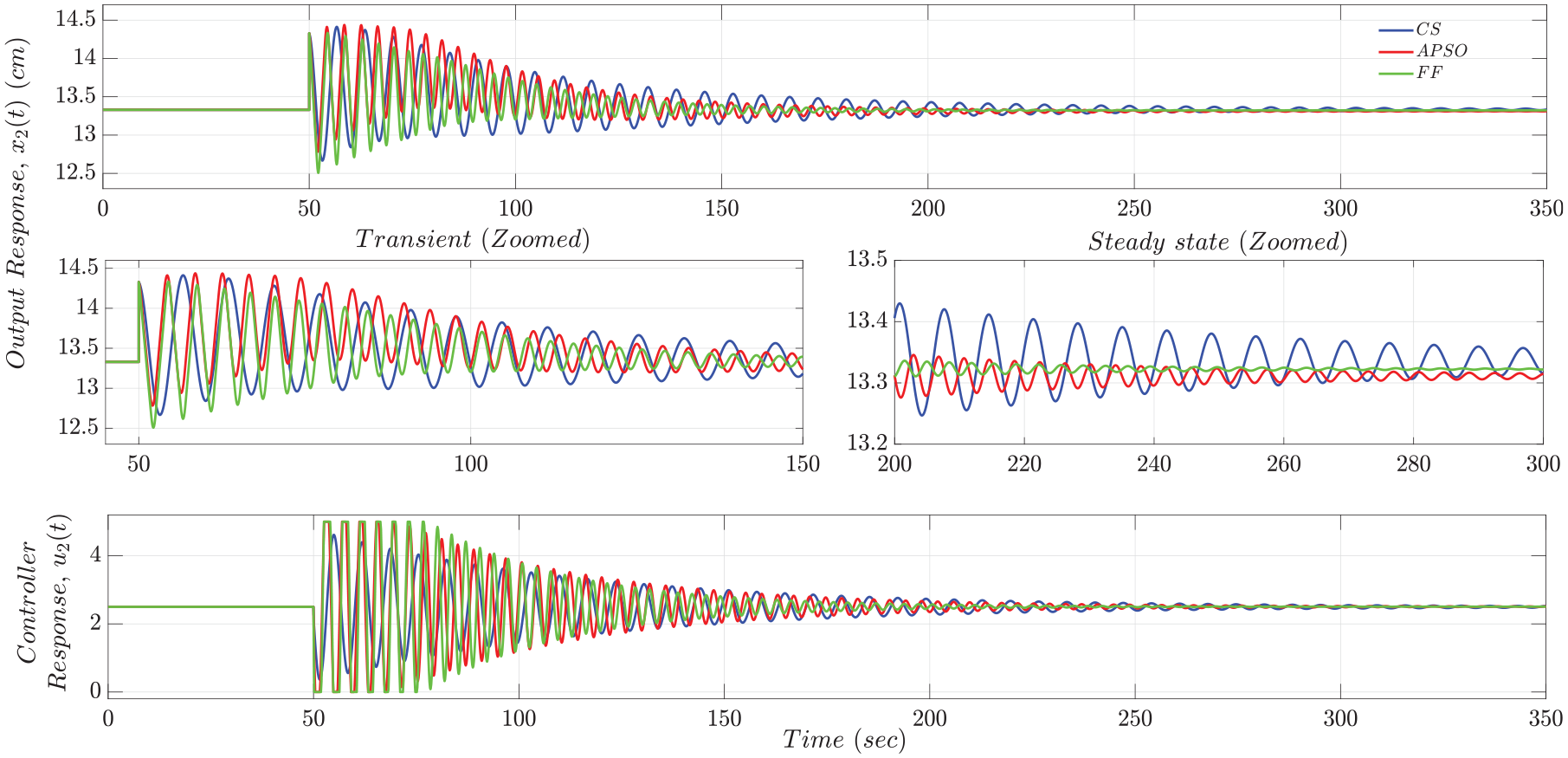
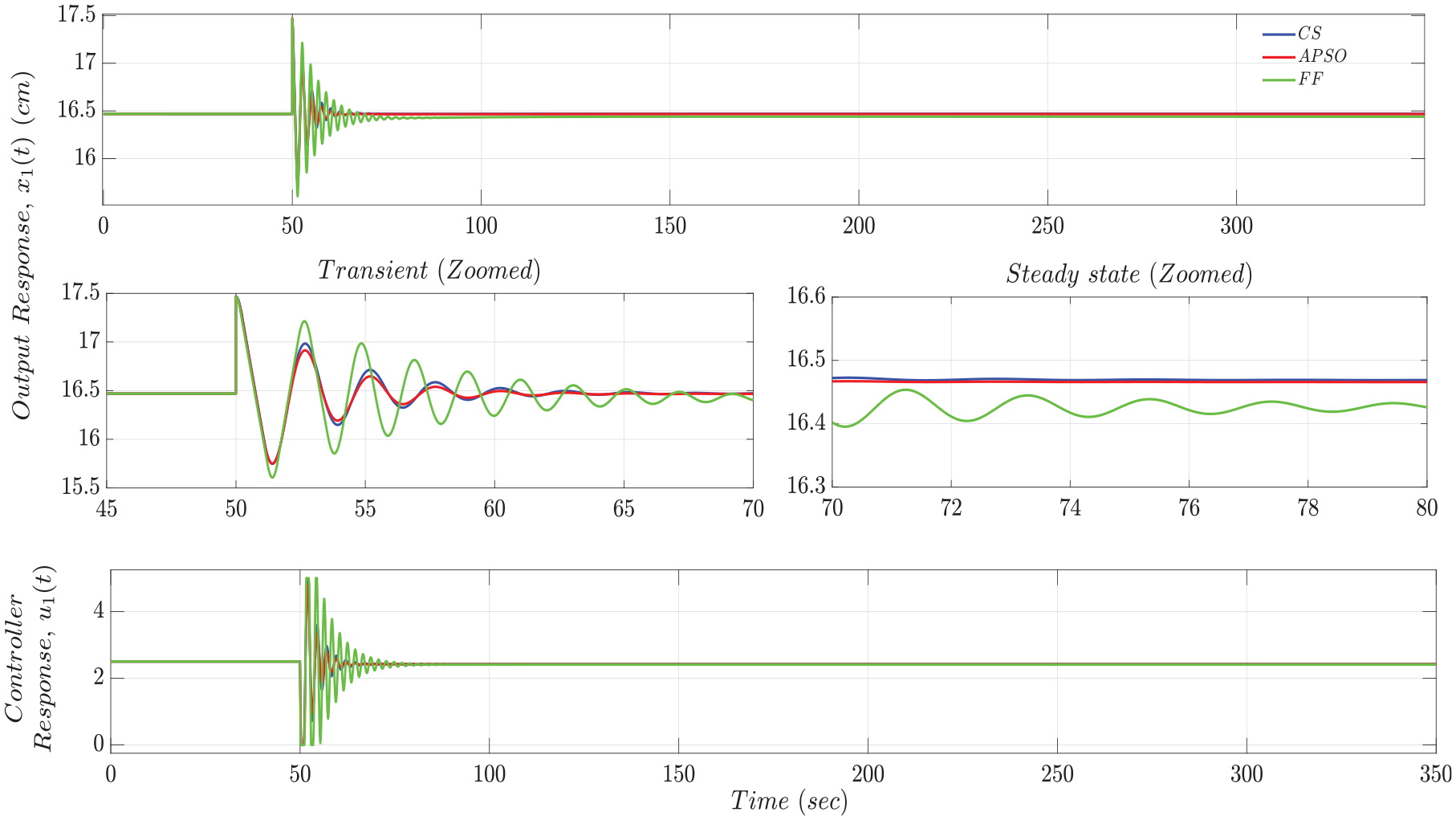
Case 1: Under disturbance condition
The simulation is performed for QTP with FOLQI and existing IOLQI controllers obtained using CS, APSO and FF algorithms for a duration of
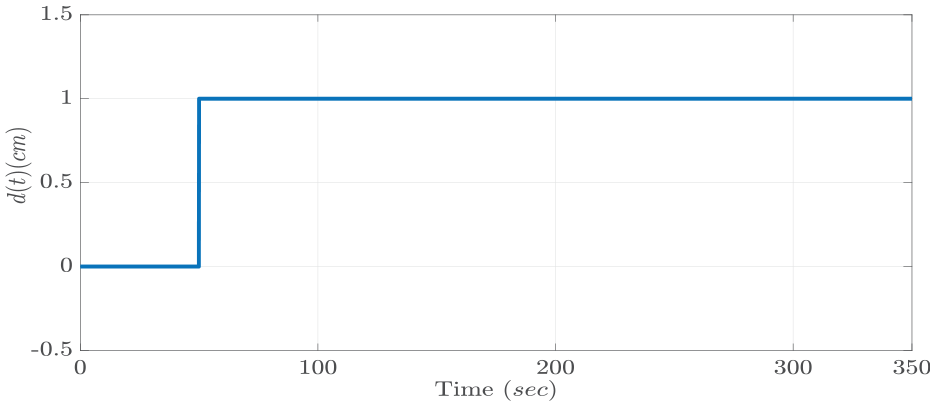
Load disturbance signal.
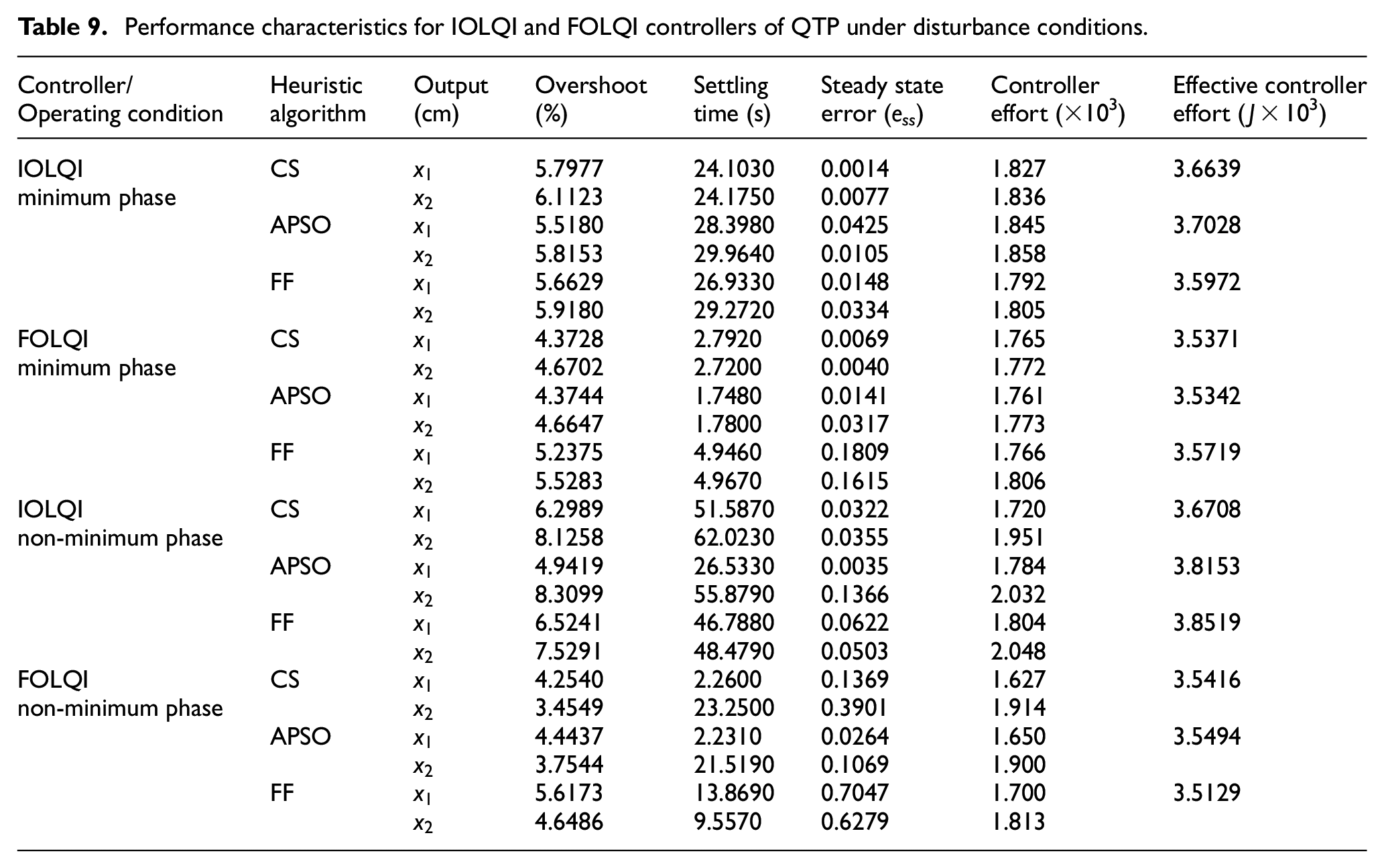
Performance characteristics for IOLQI and FOLQI controllers of QTP under disturbance conditions.
Output
Output
Output
Output
Output
Output
Output
Output
From the table, it is observed that FOLQI controllers provide better time characteristics
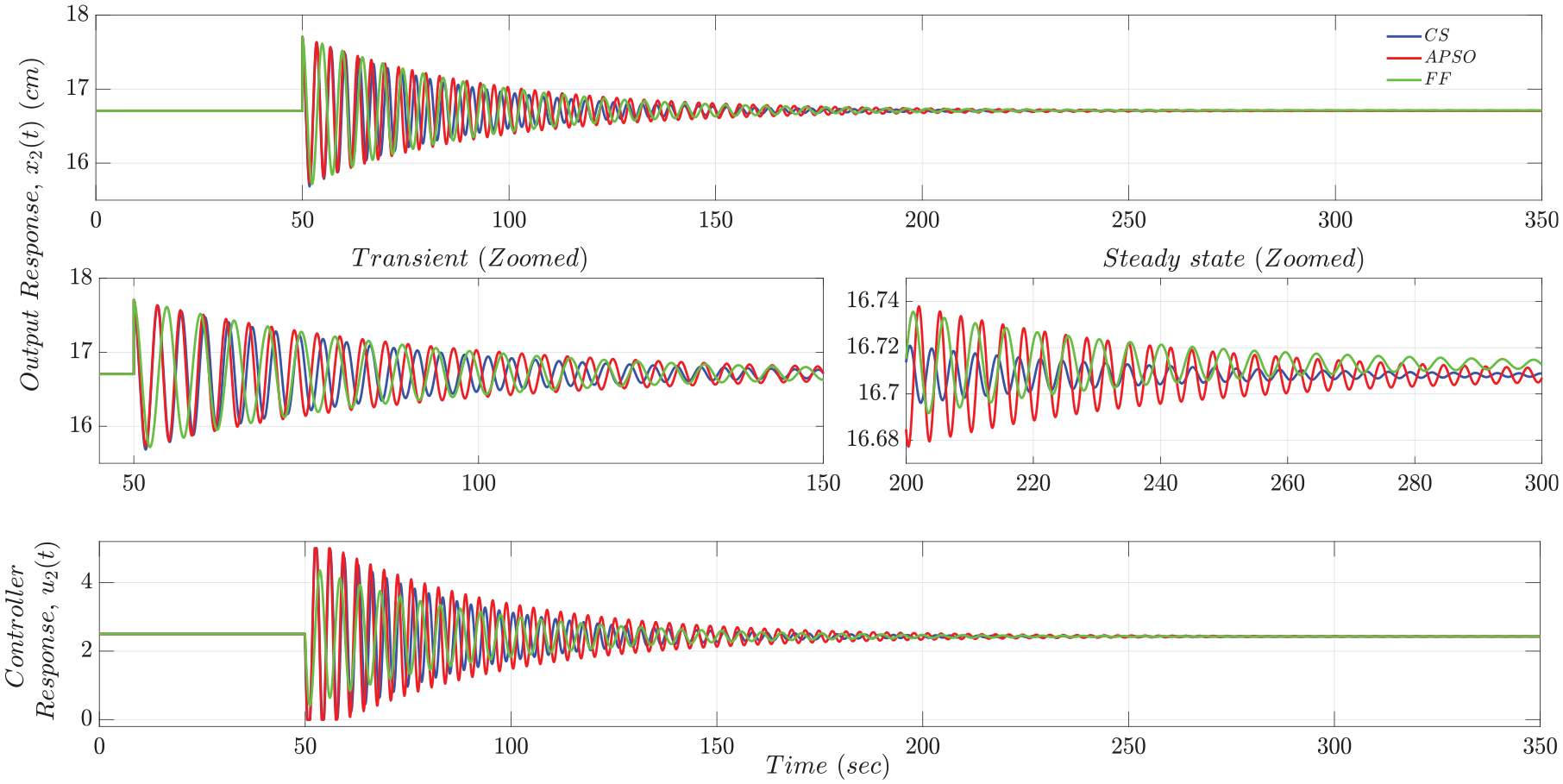
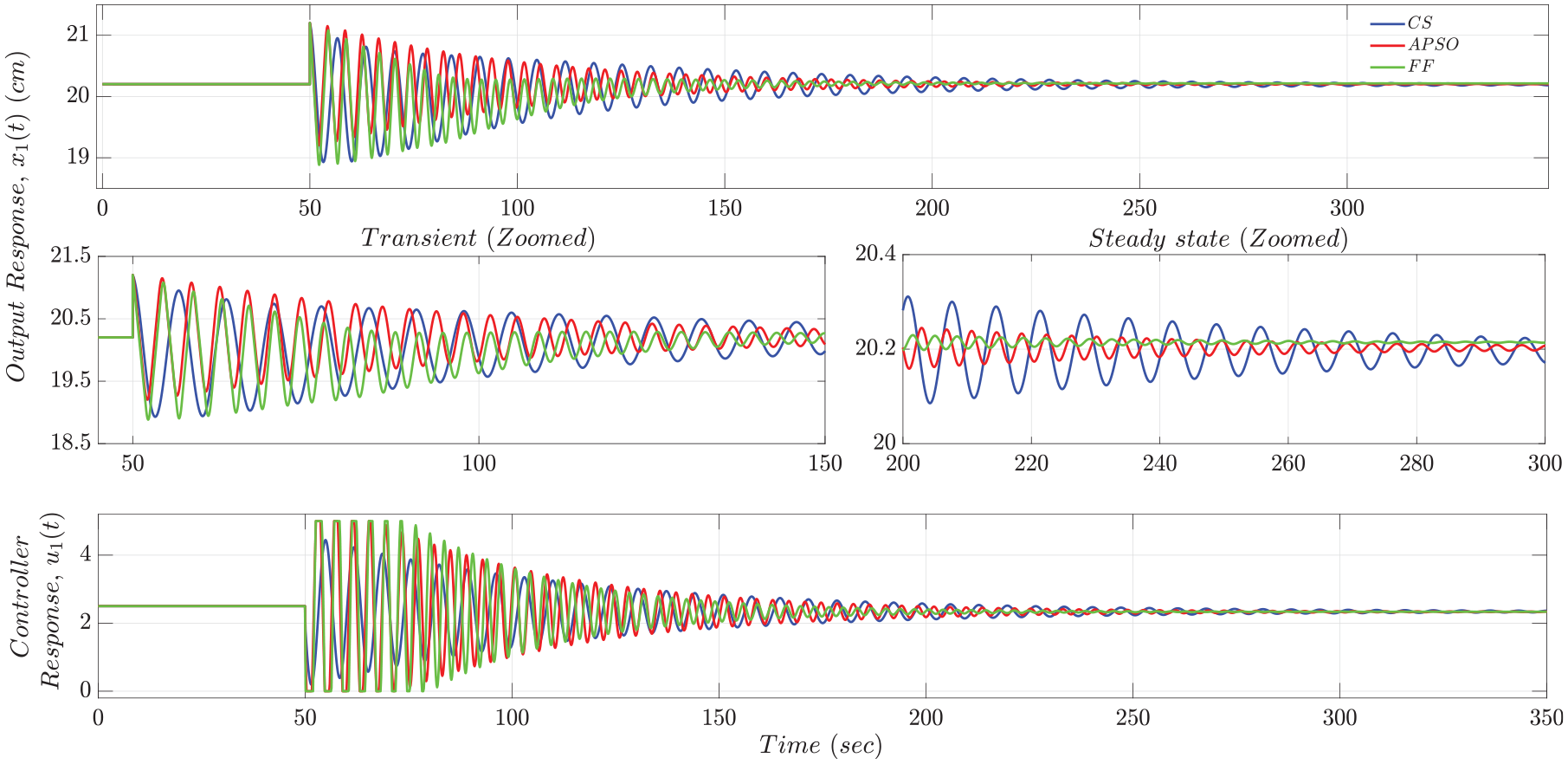
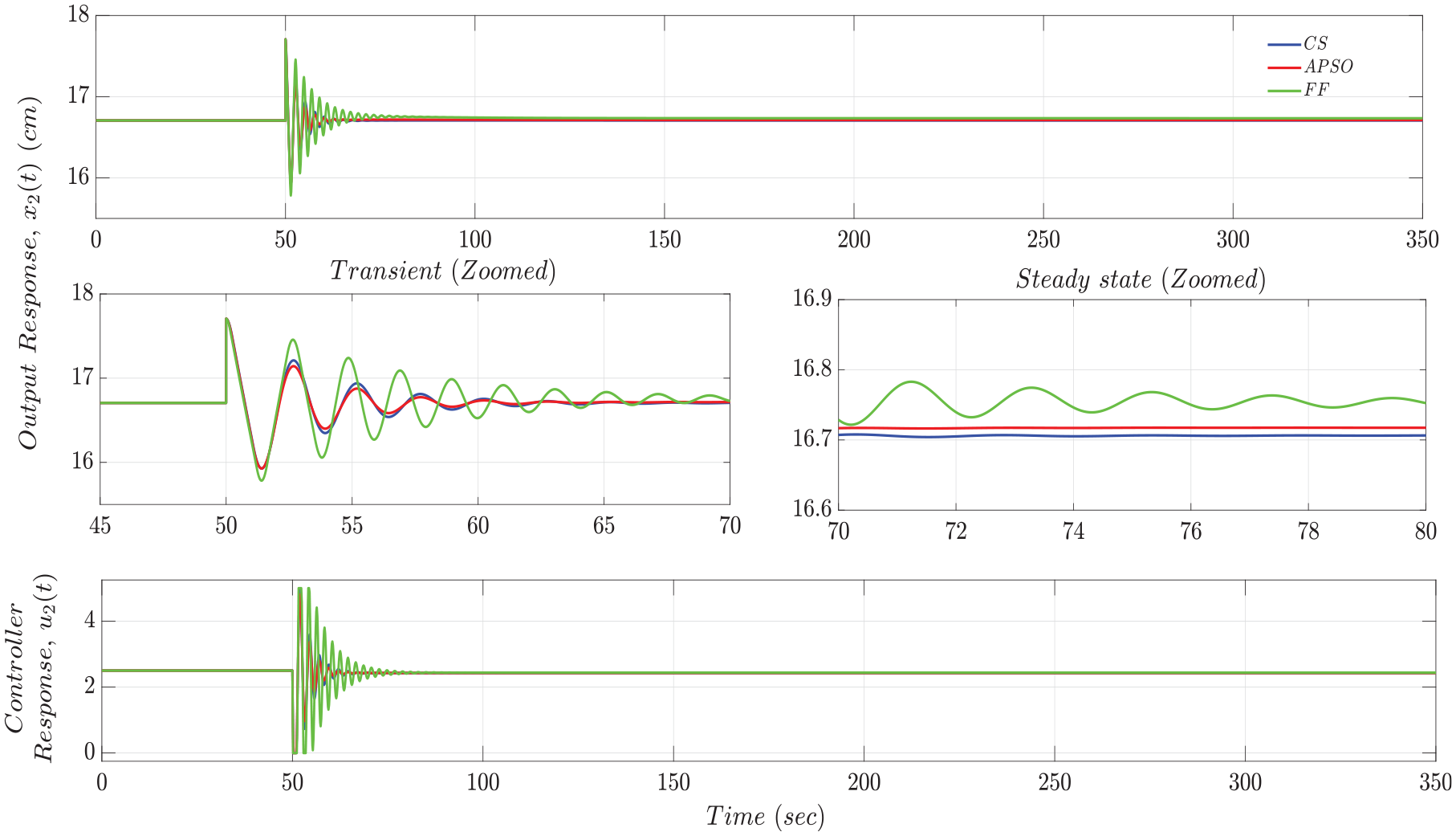
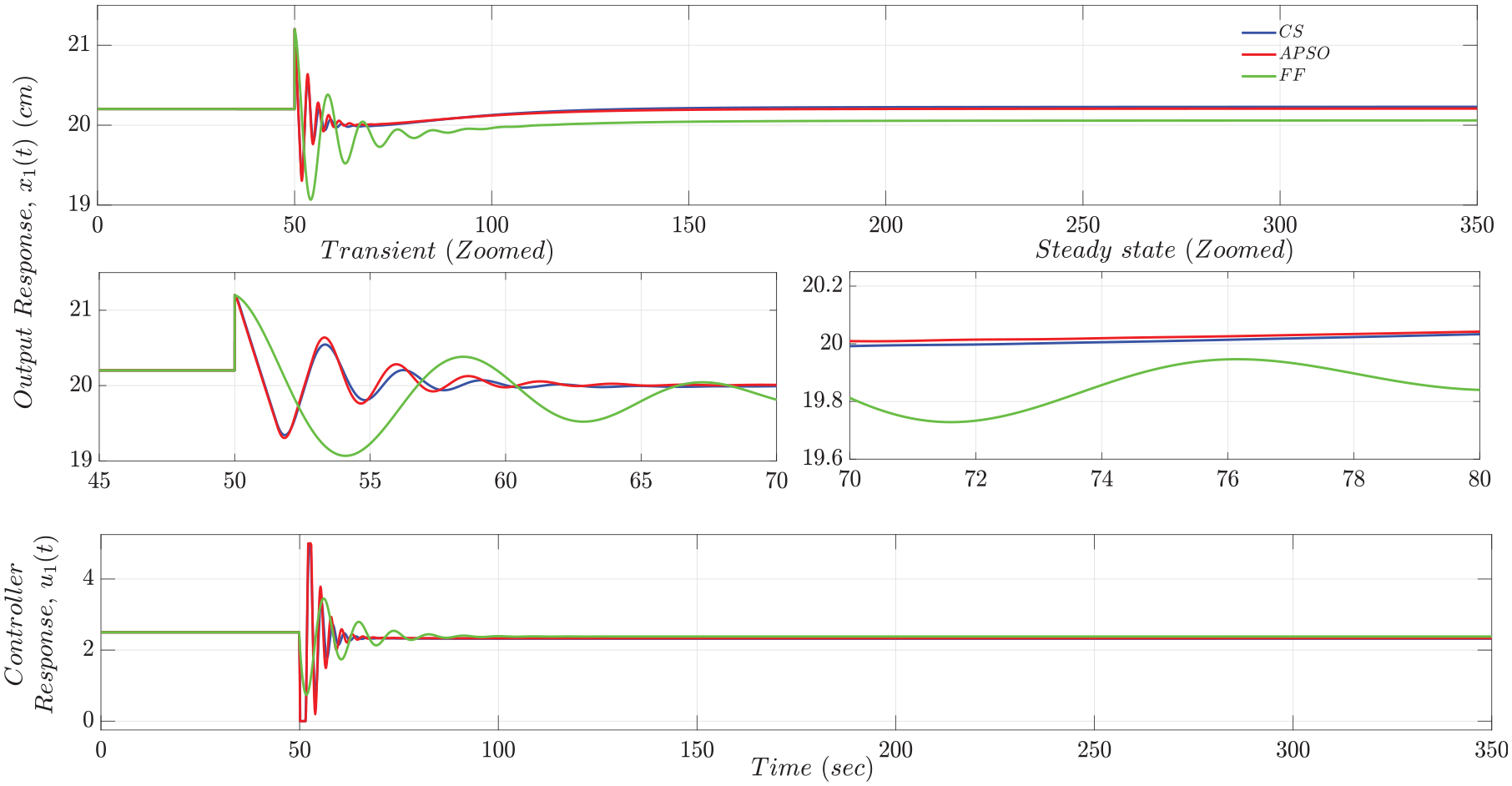
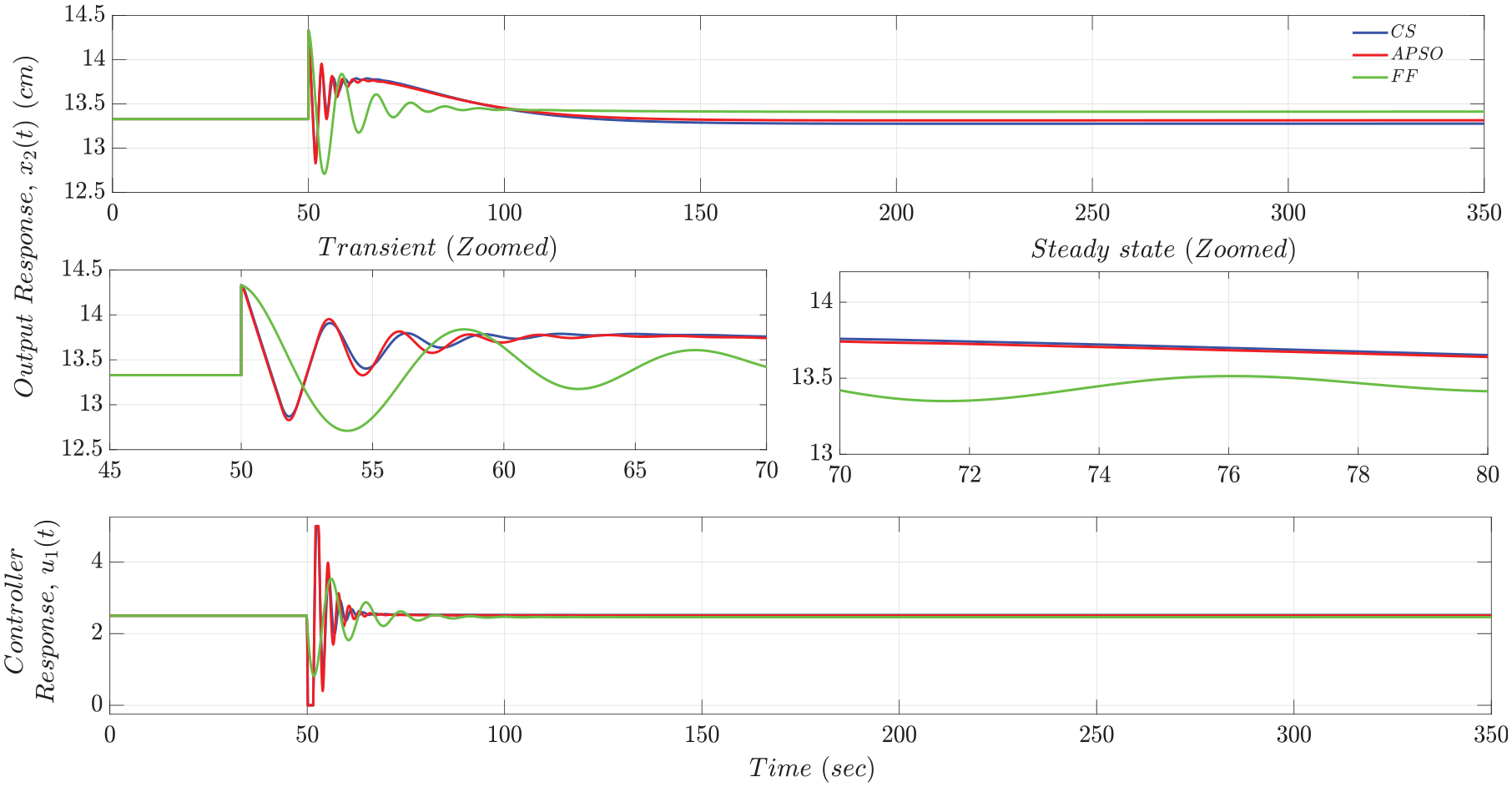
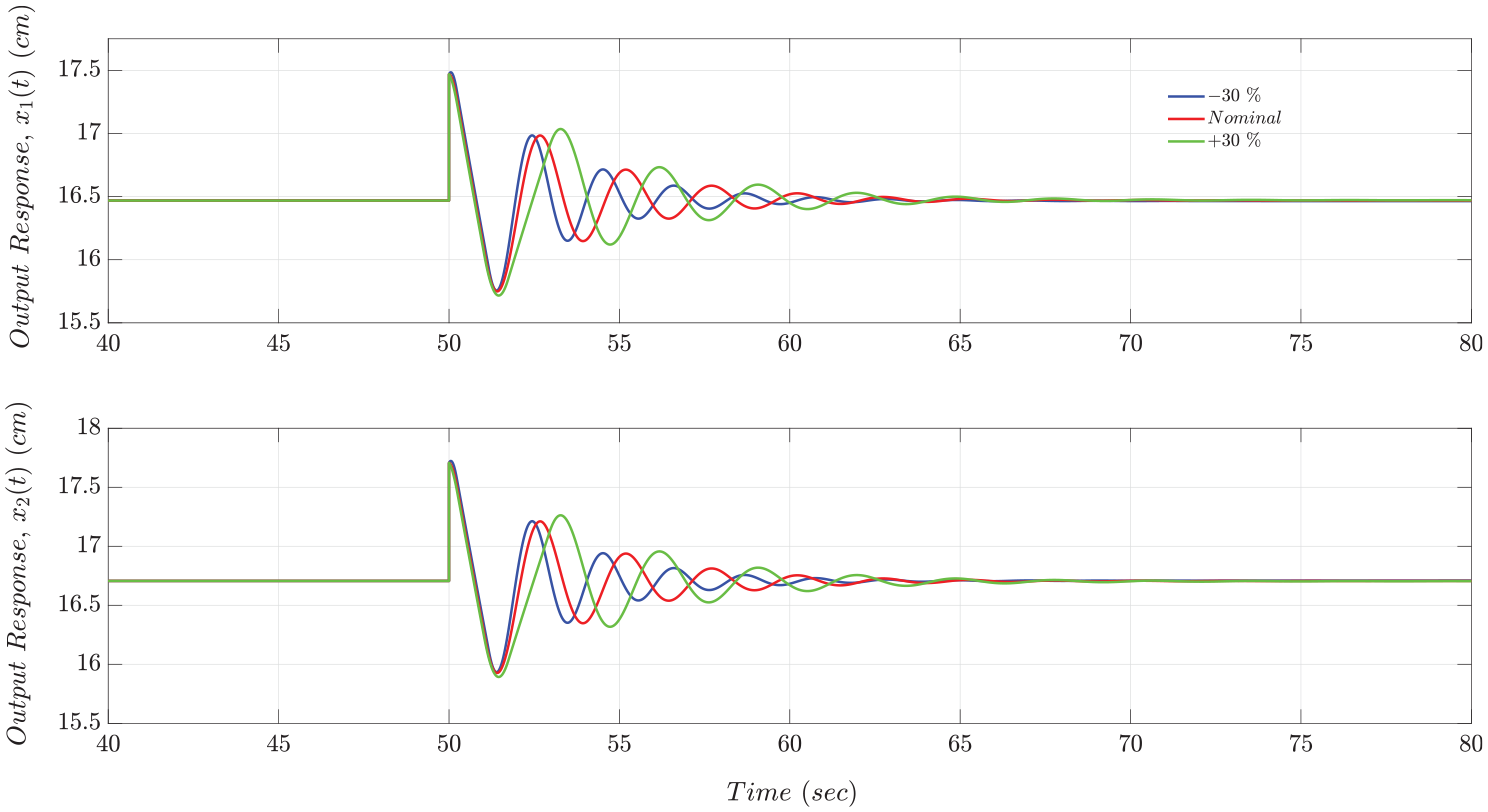
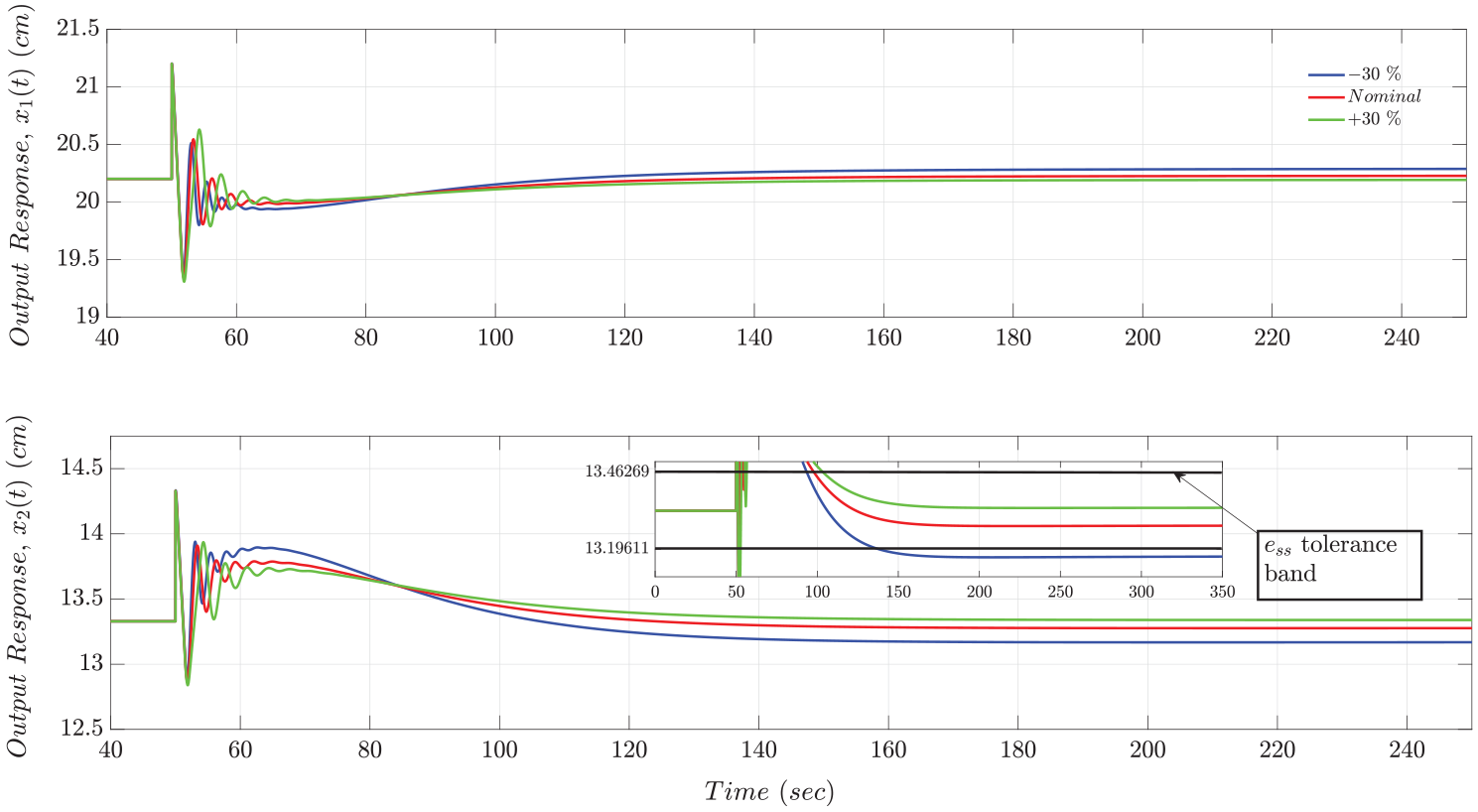
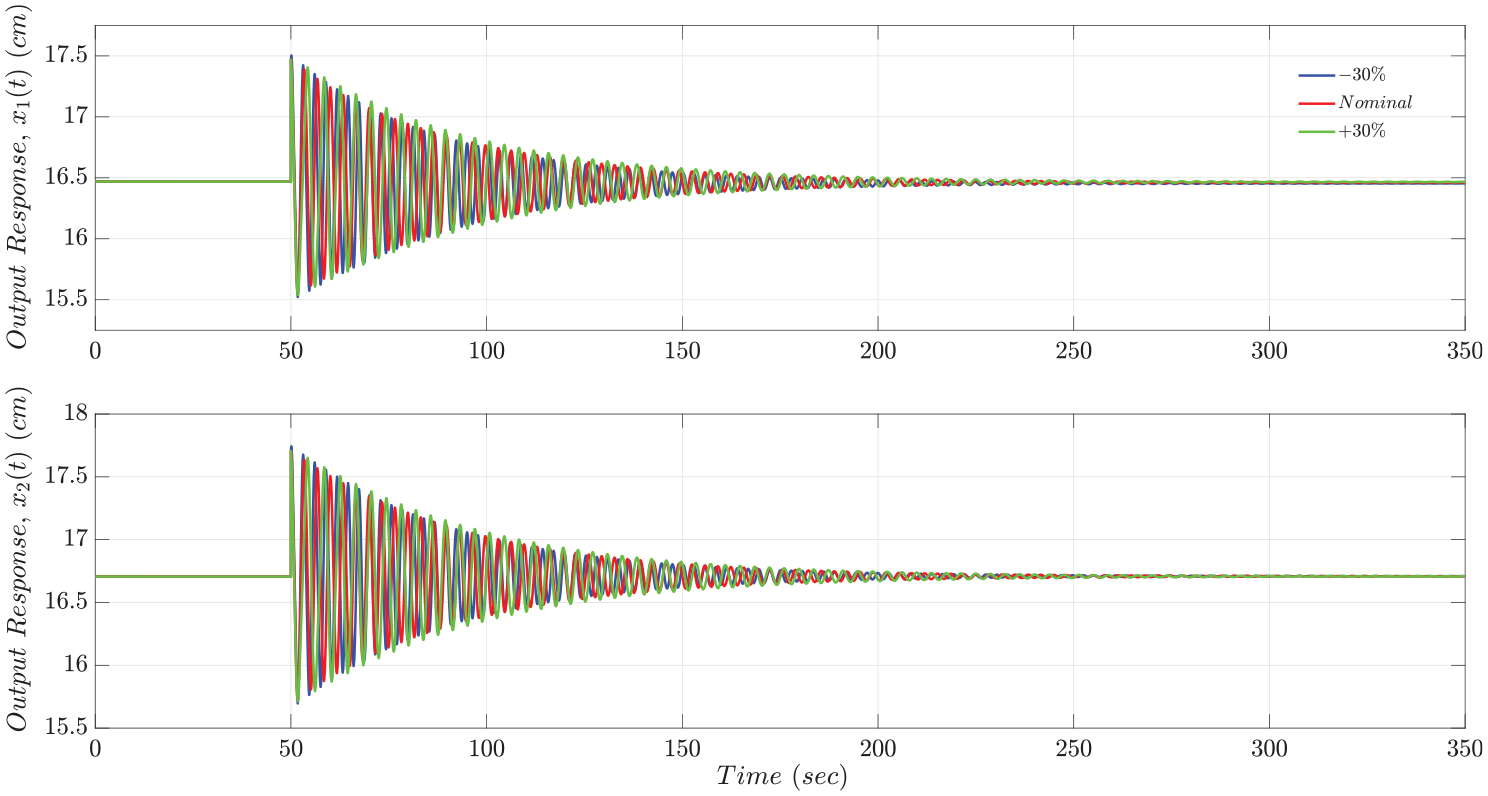
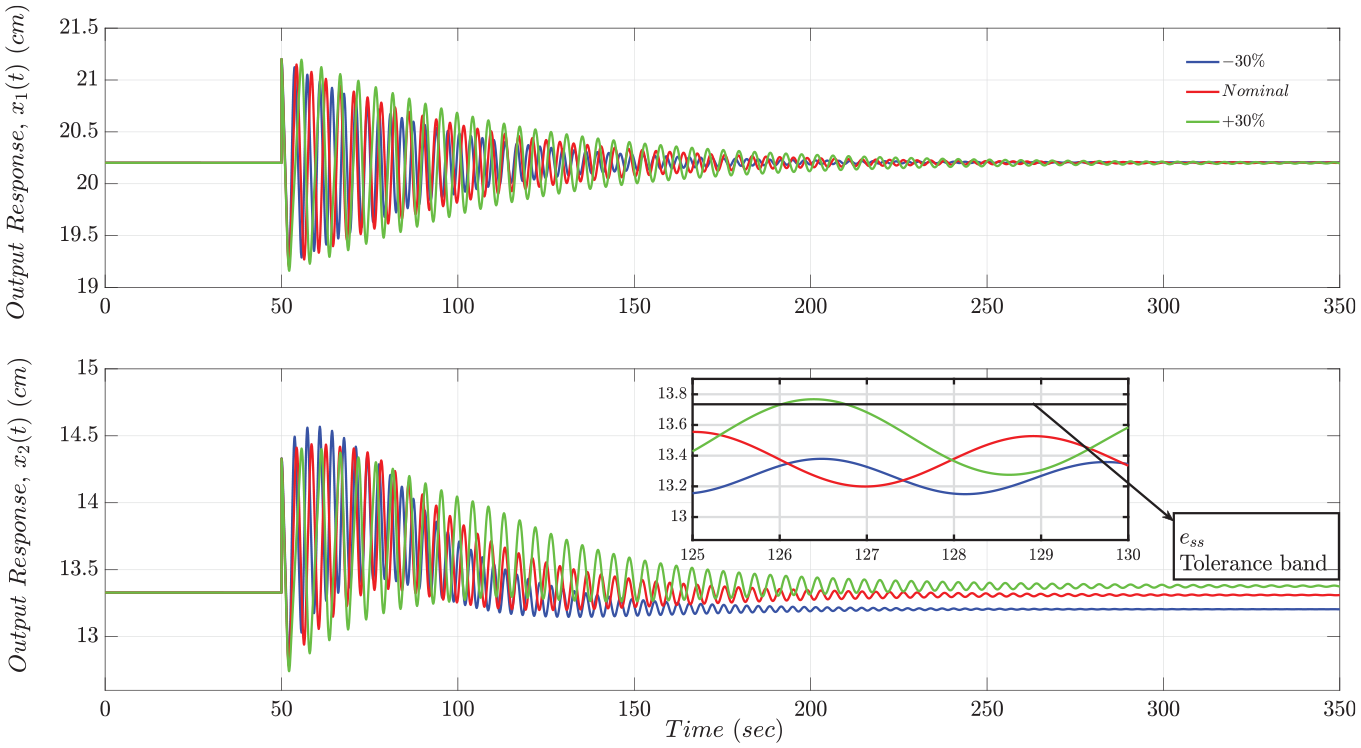
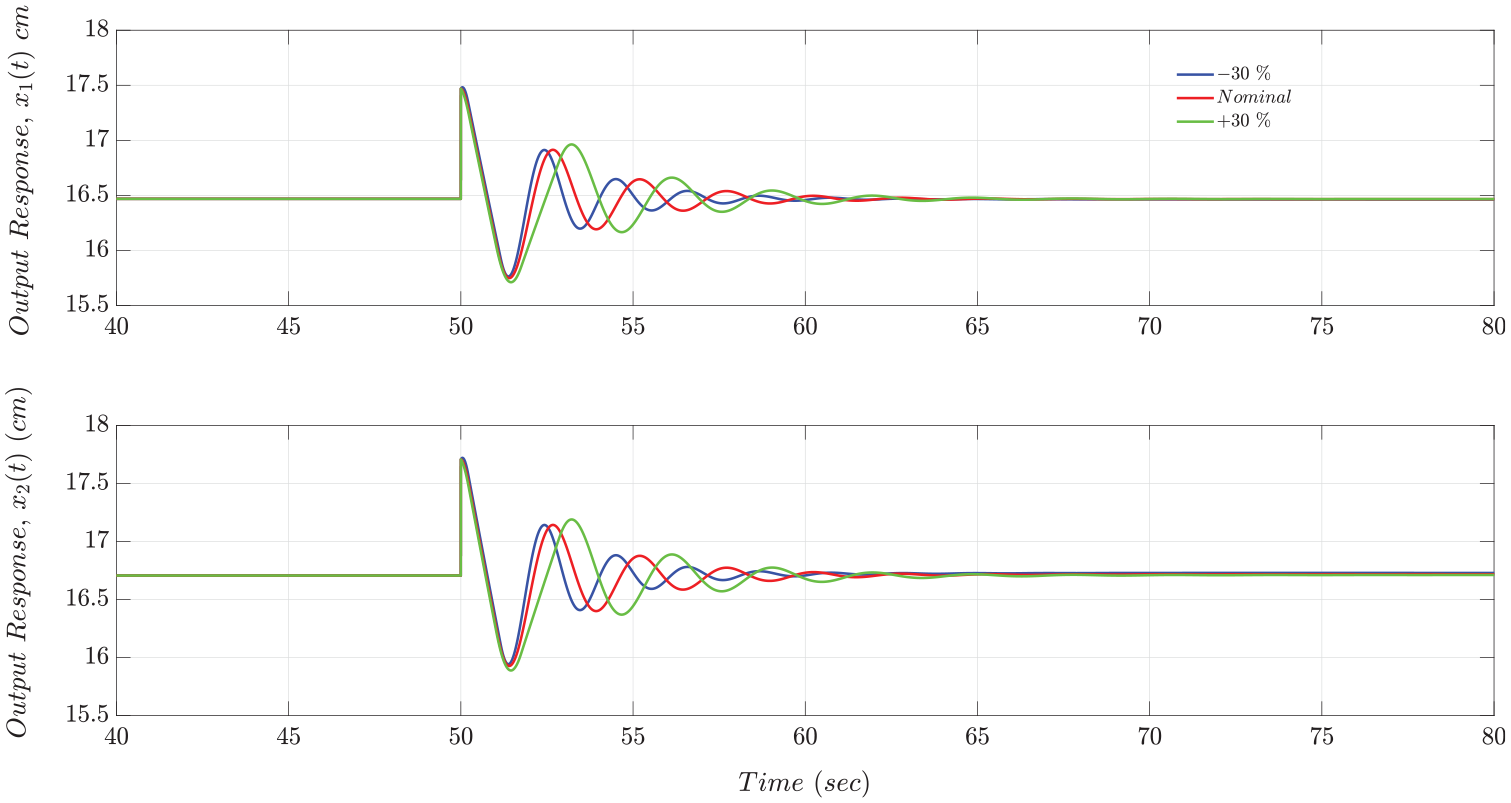
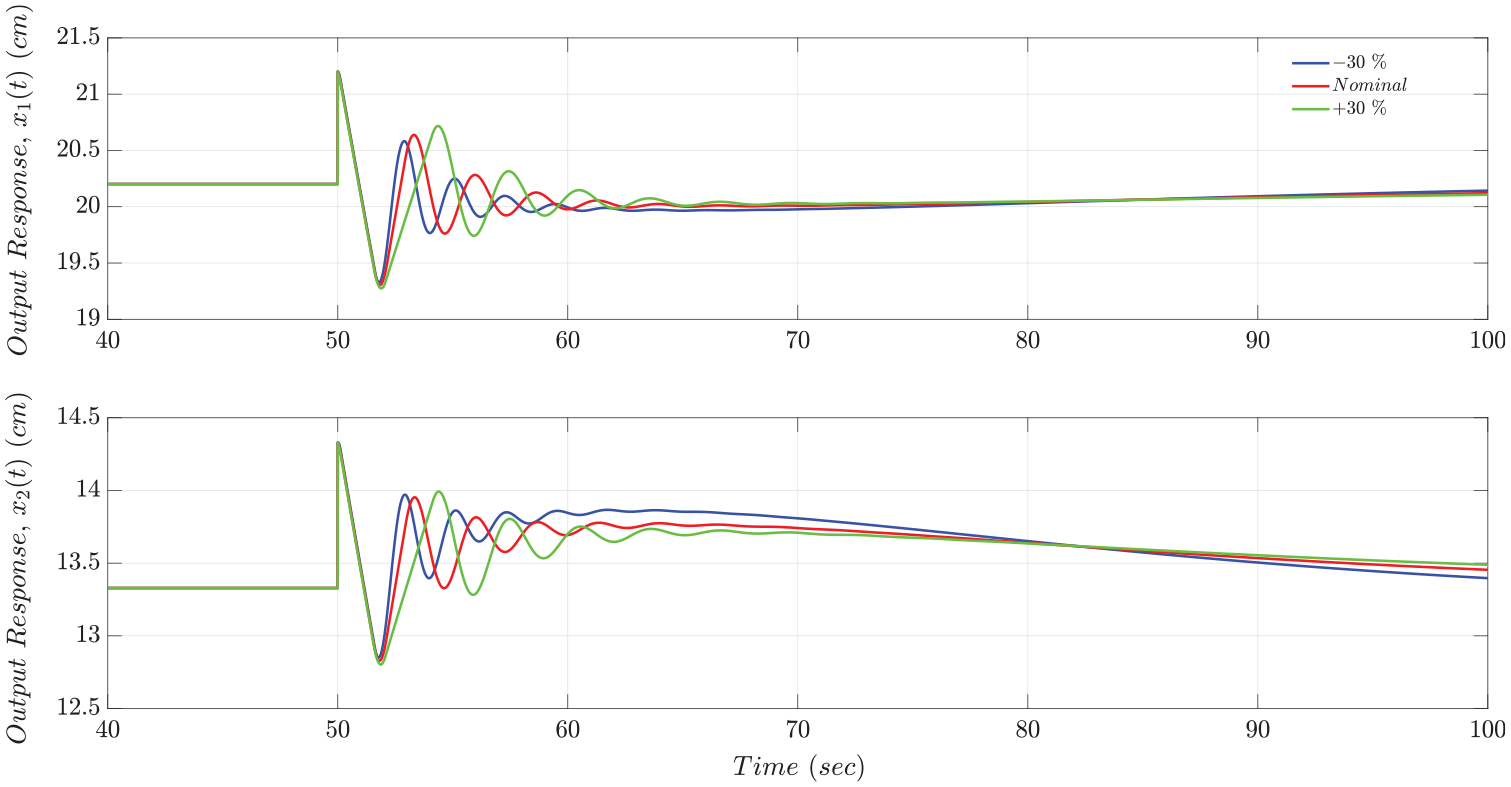
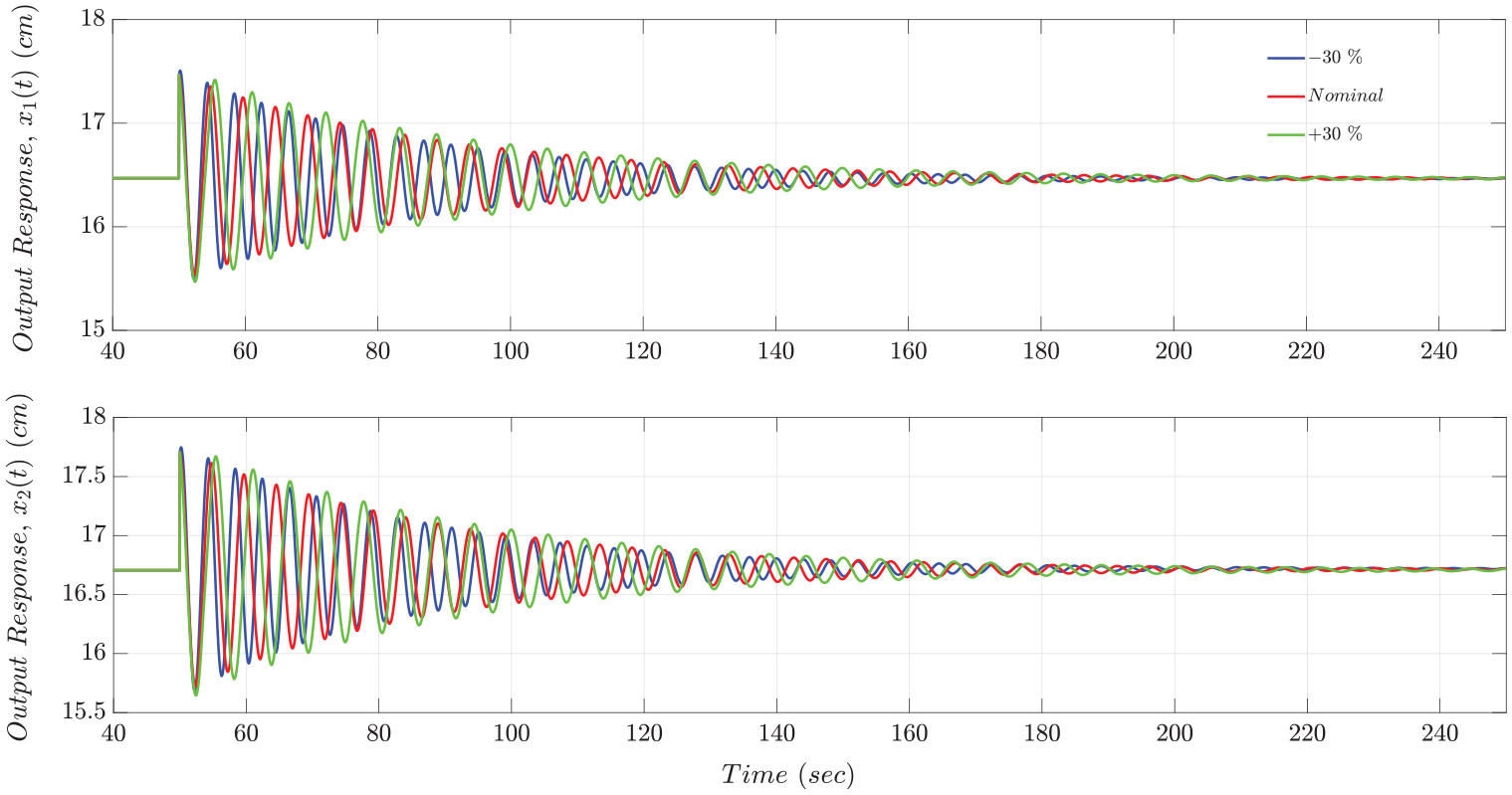
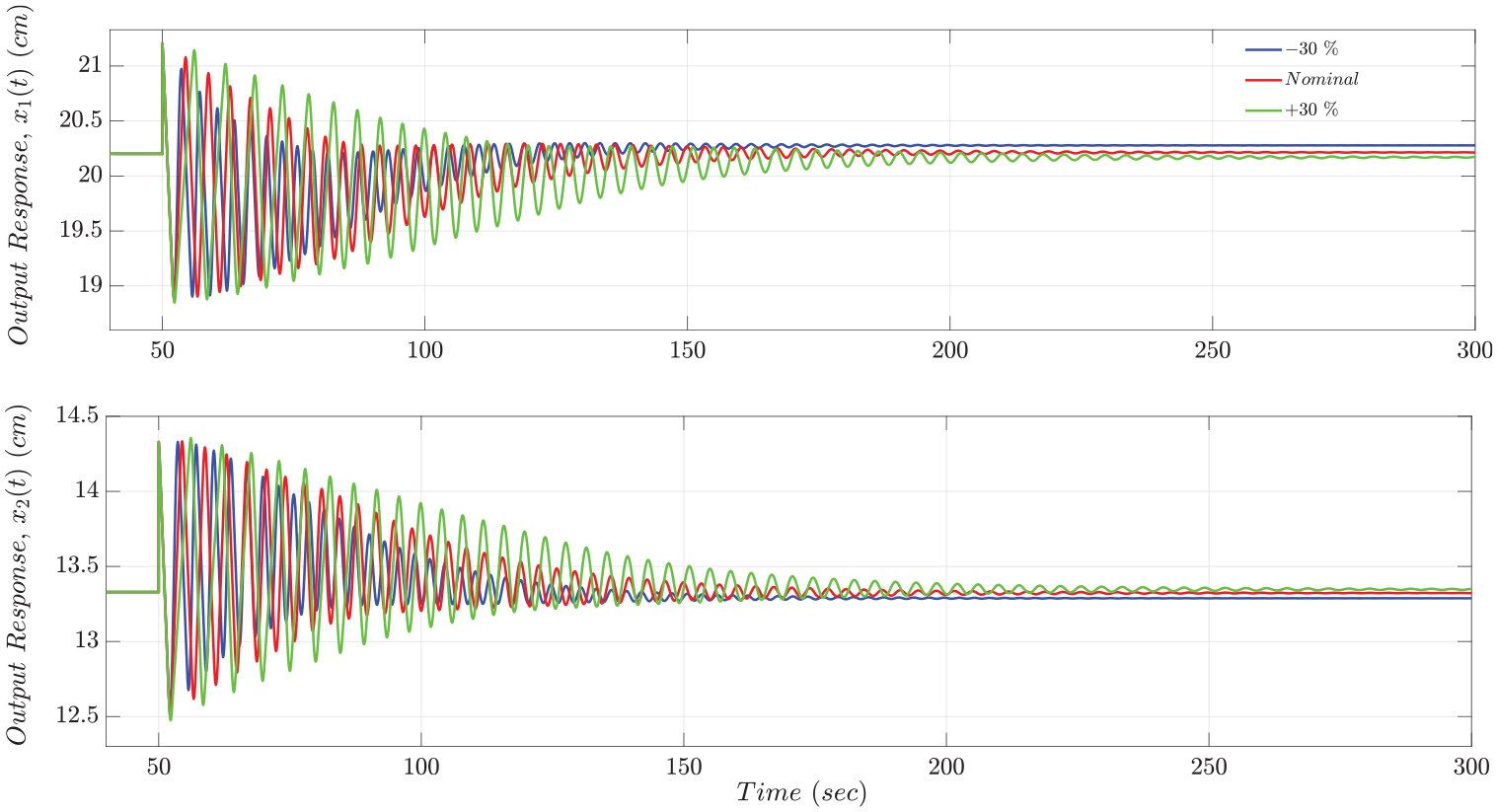
Case 2: Under disturbance and parameter uncertainty
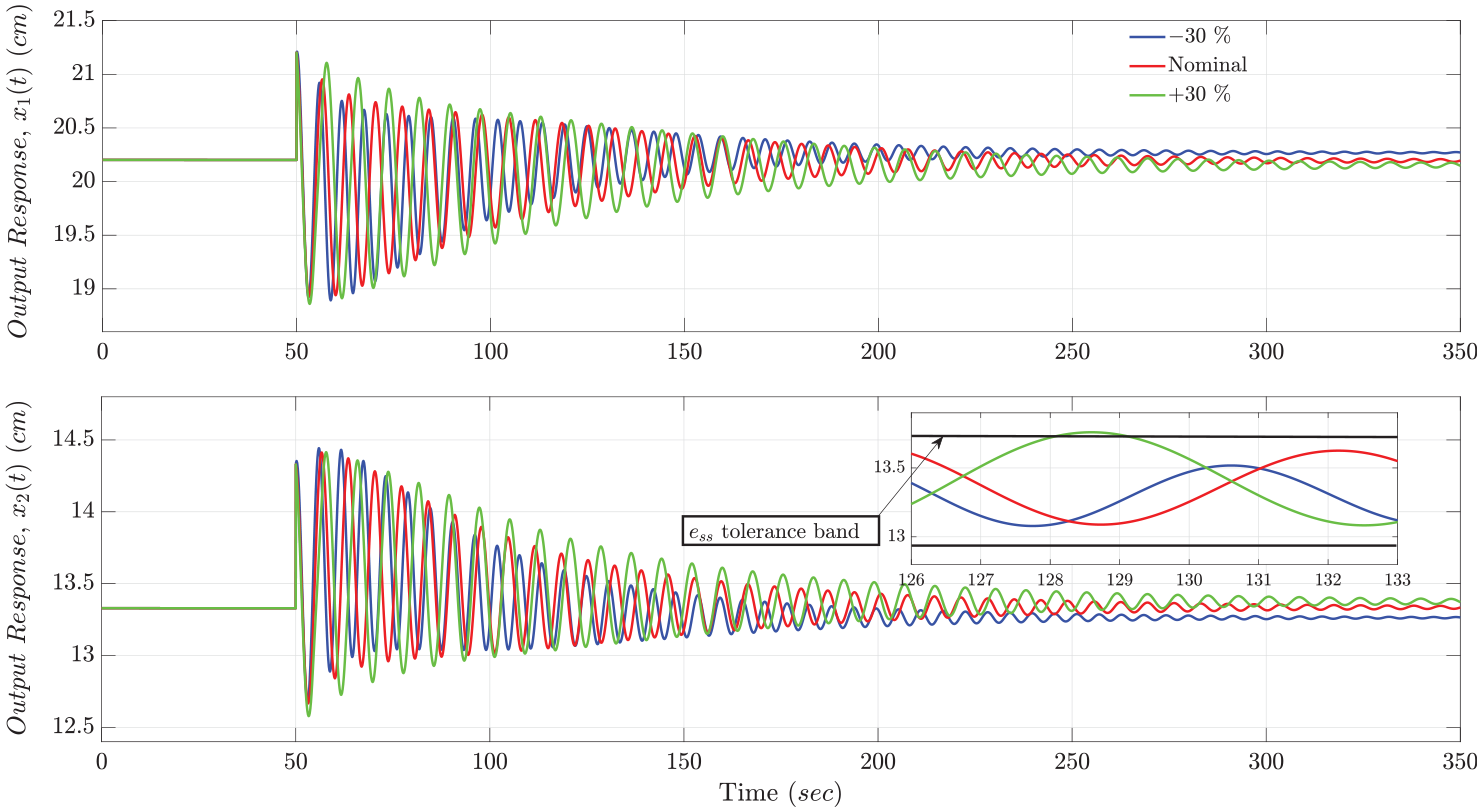
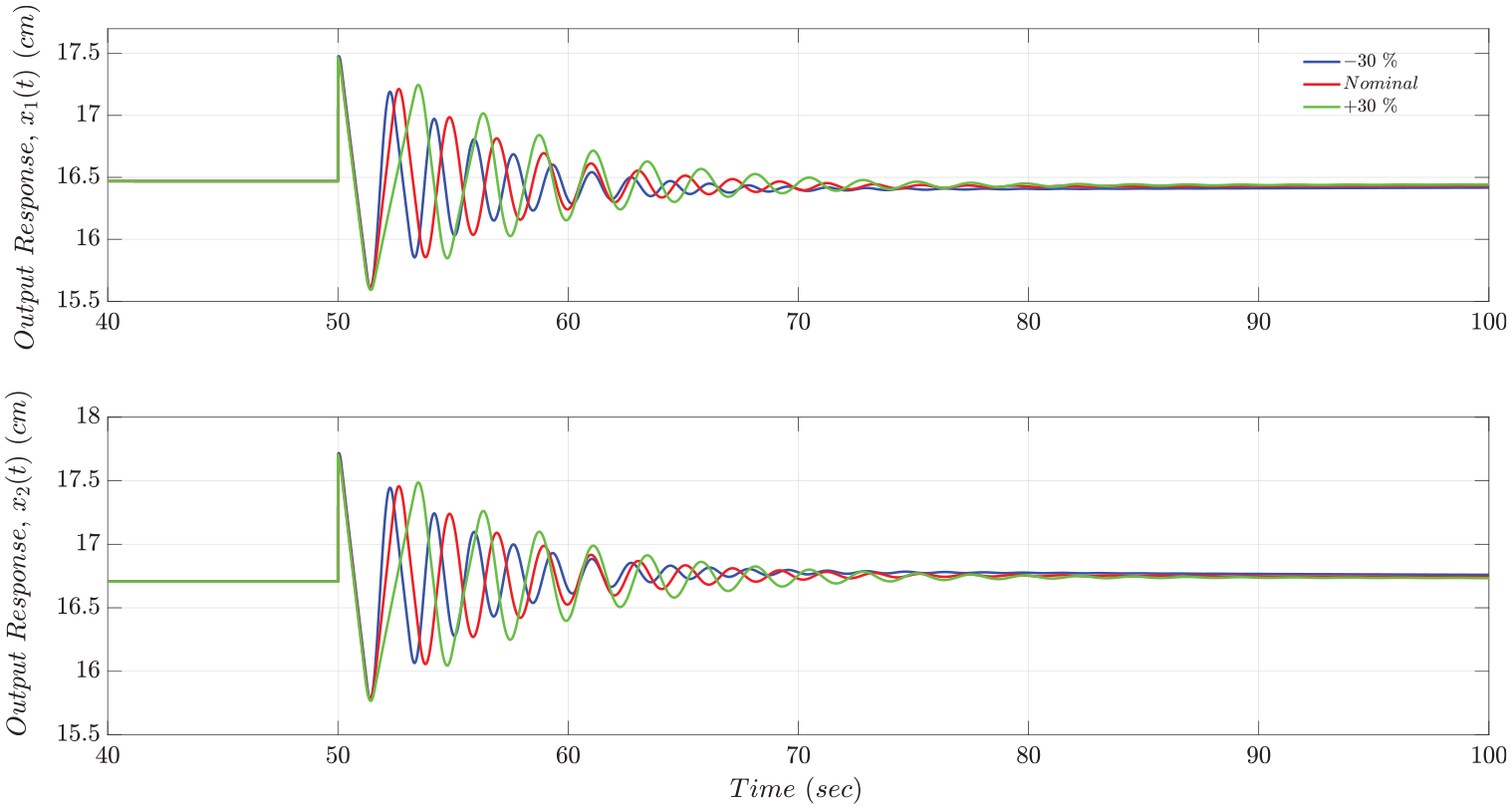
The robustness of the FOLQI controllers are analysed by introducing parameter uncertainty in
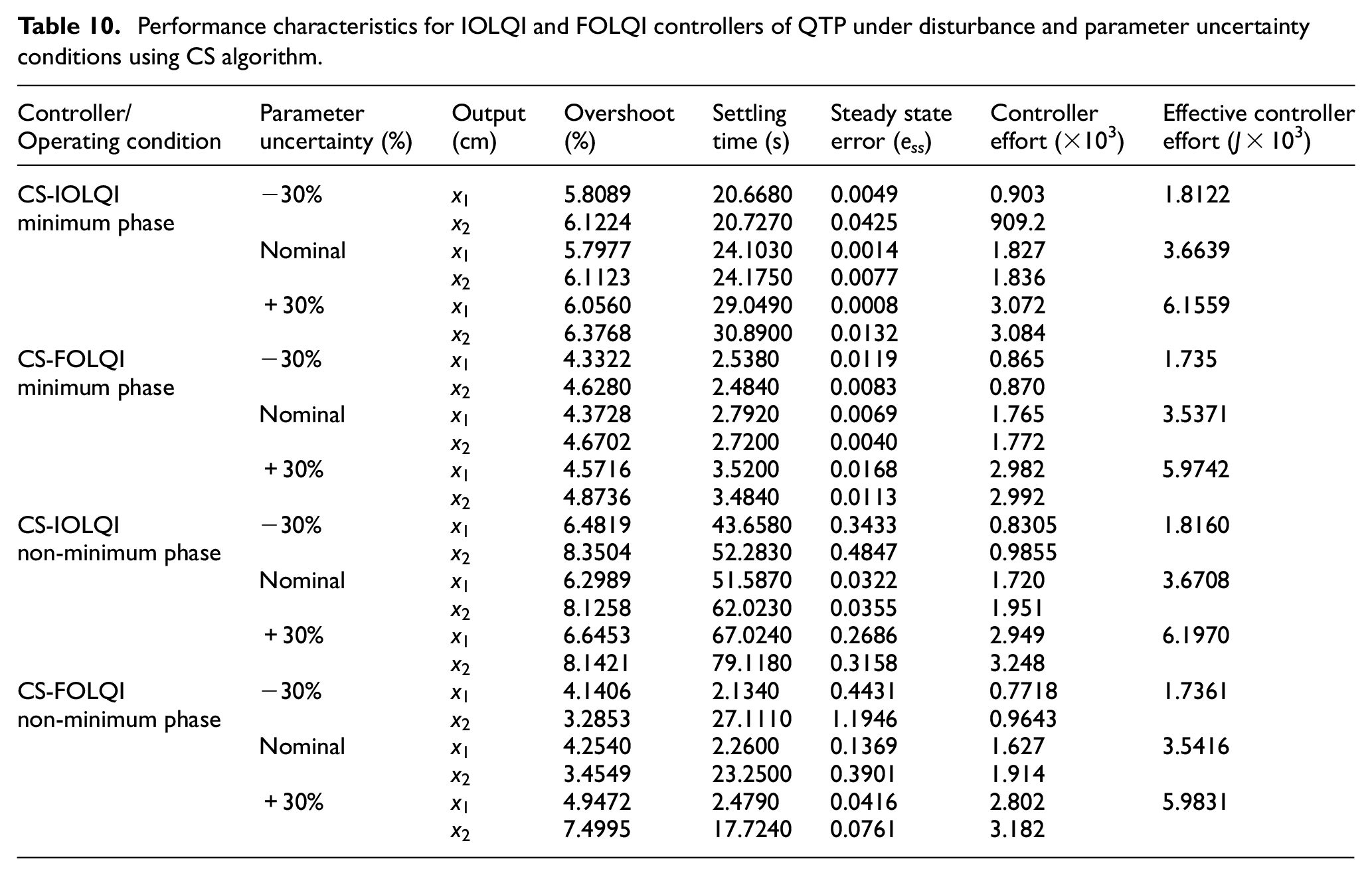
Performance characteristics for IOLQI and FOLQI controllers of QTP under disturbance and parameter uncertainty conditions using CS algorithm.
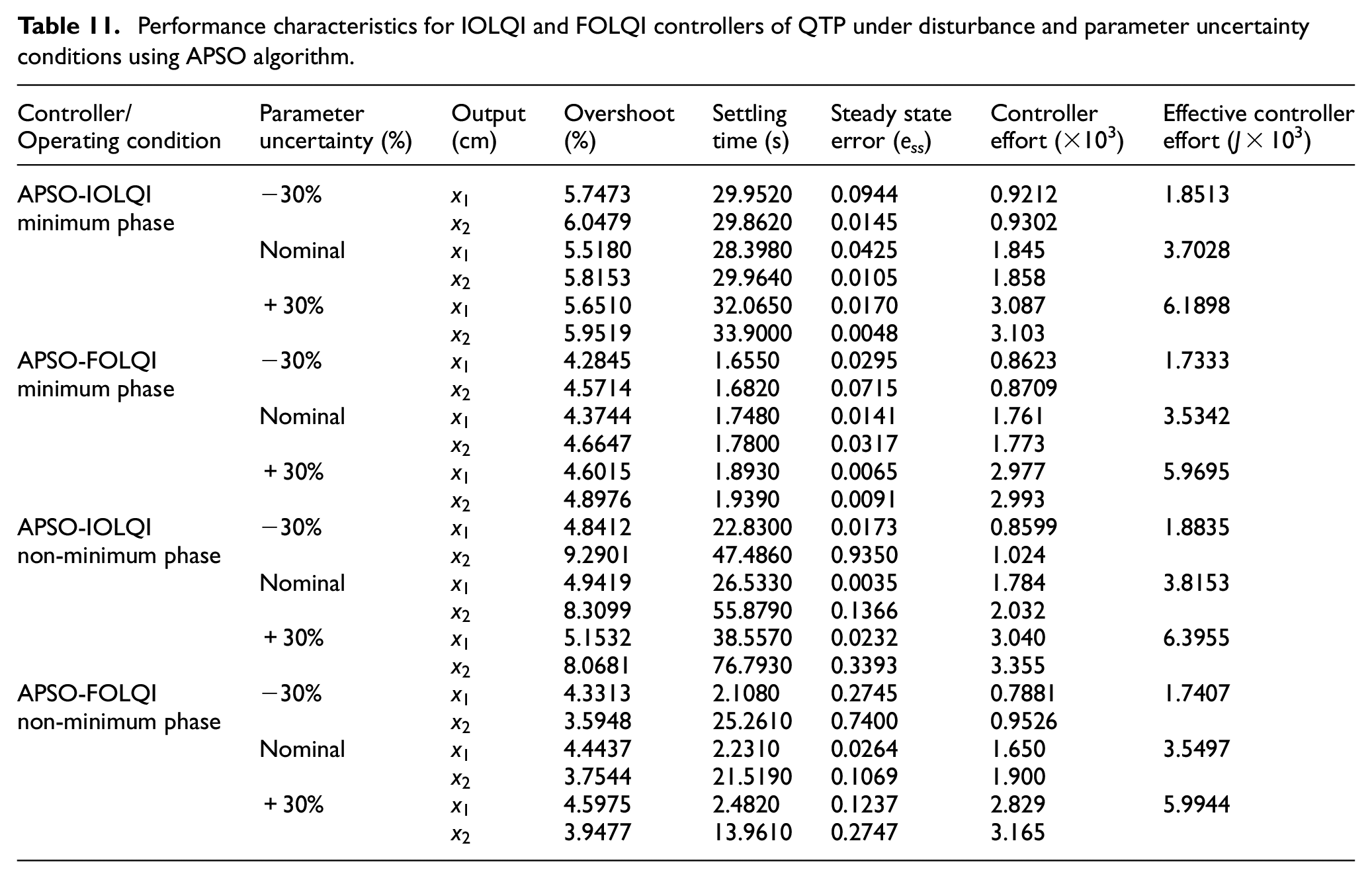
Performance characteristics for IOLQI and FOLQI controllers of QTP under disturbance and parameter uncertainty conditions using APSO algorithm.
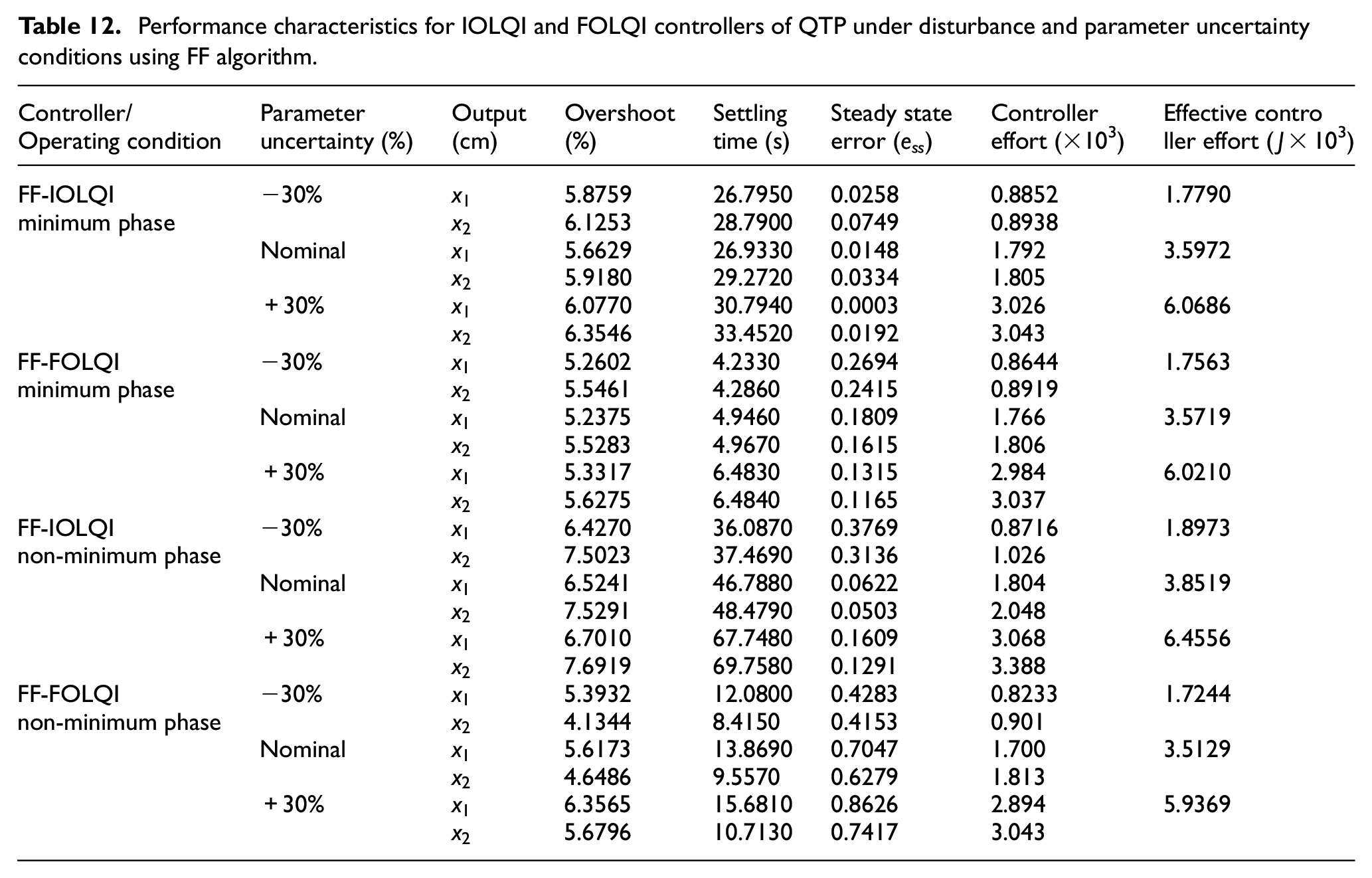
Performance characteristics for IOLQI and FOLQI controllers of QTP under disturbance and parameter uncertainty conditions using FF algorithm.
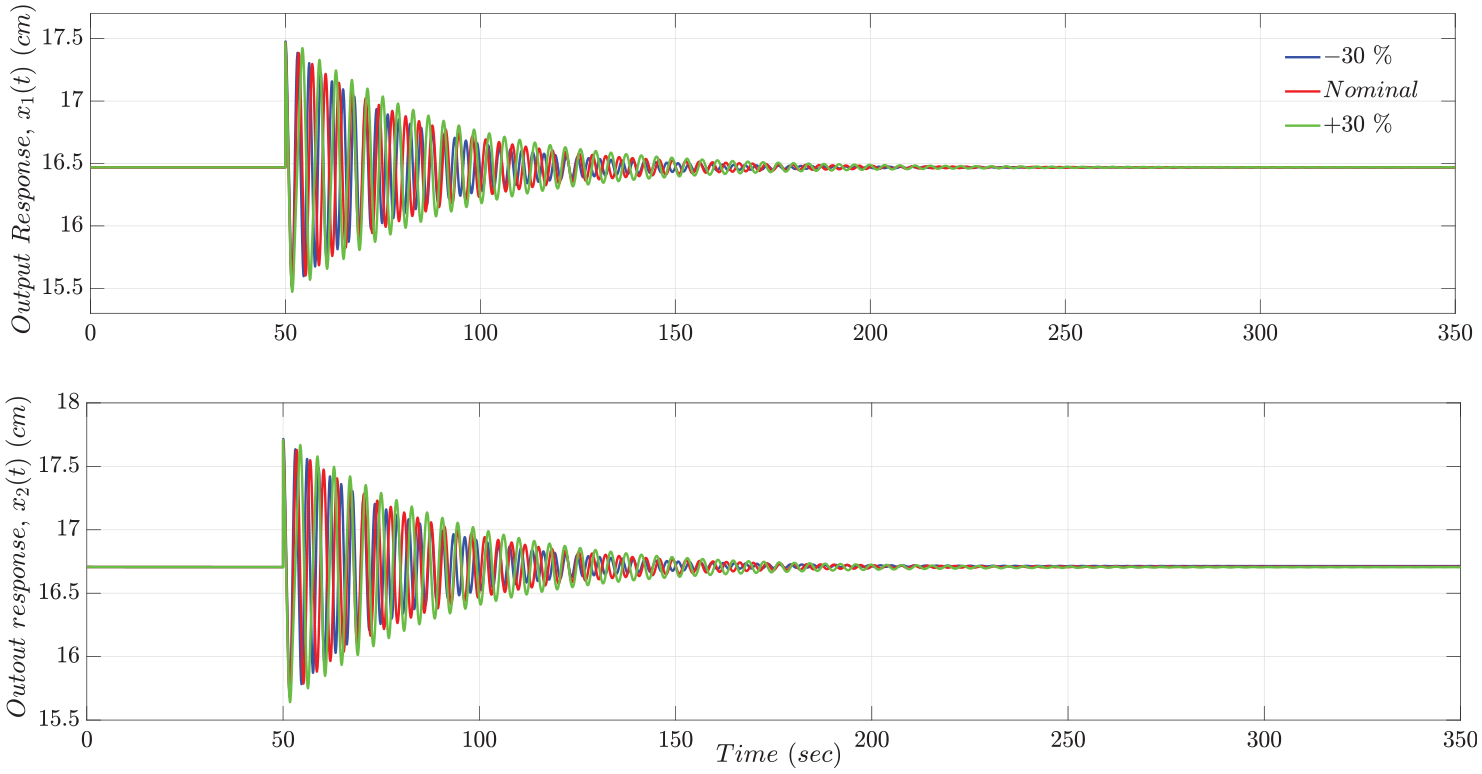
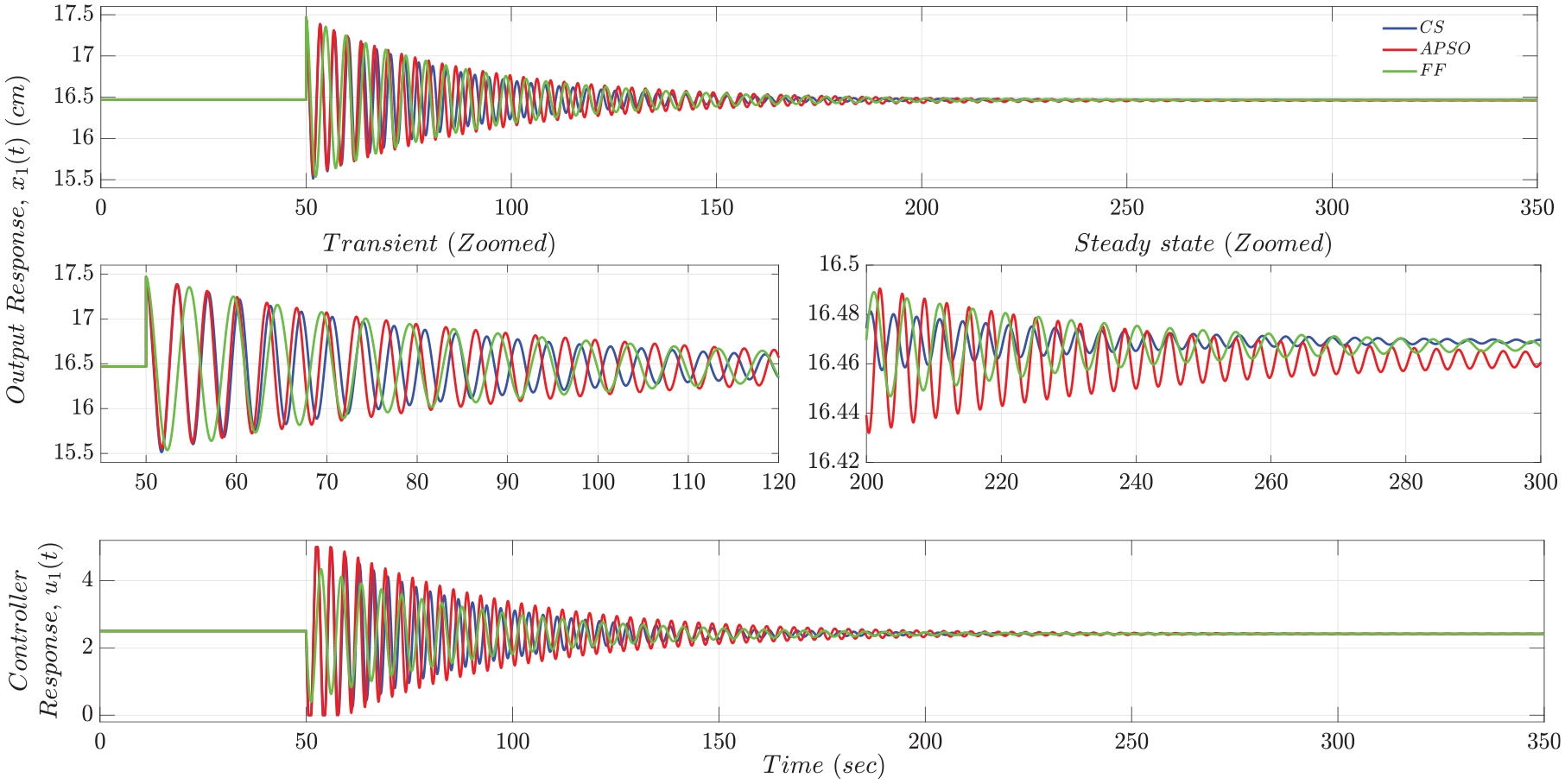
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
Output responses (
From the table, it is observed that (i) FOLQI controllers provide better time characteristics
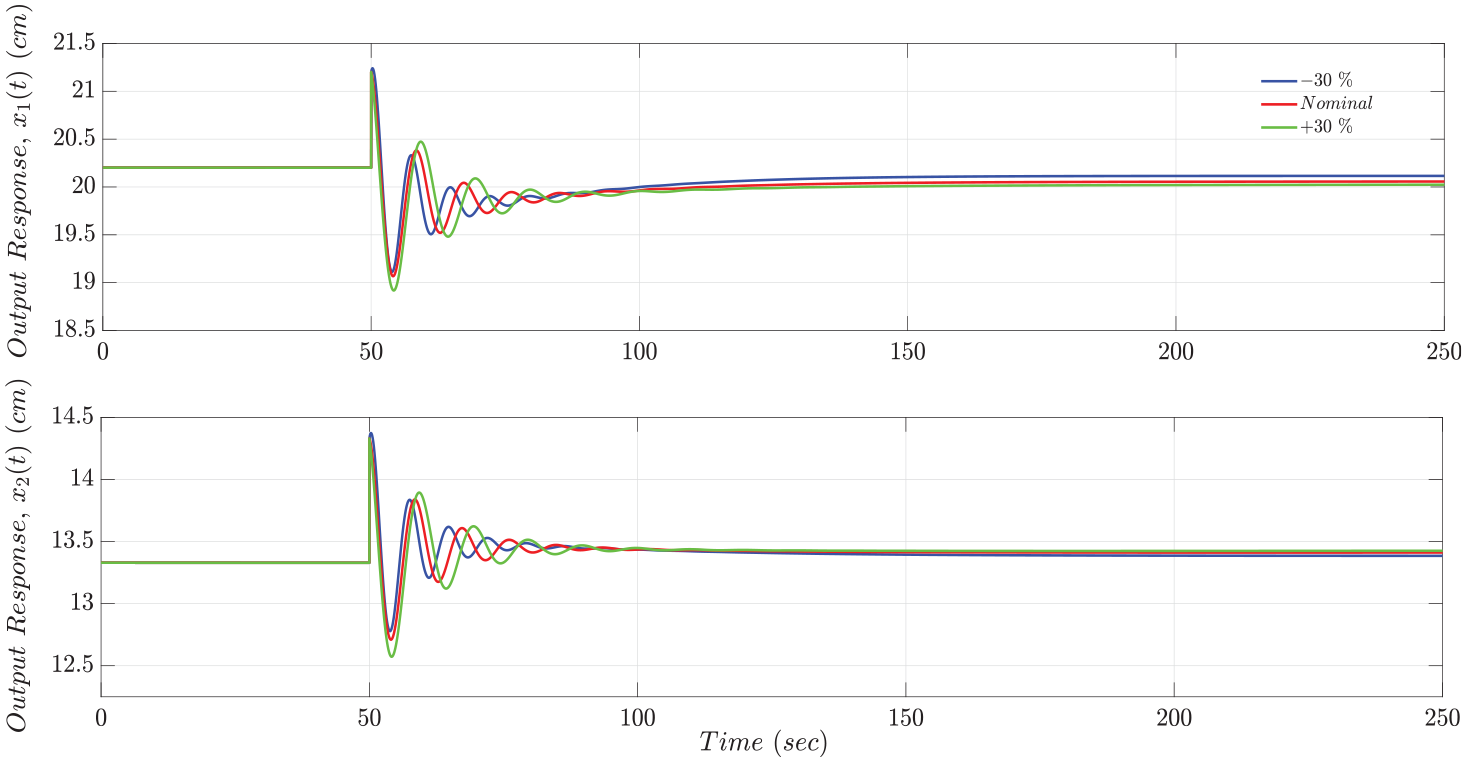
Case 3: Tracking performances under nominal/disturbance condition
The equilibrium points of QTP with both IOLQI/FOLQI controllers are increased to the magnitude of
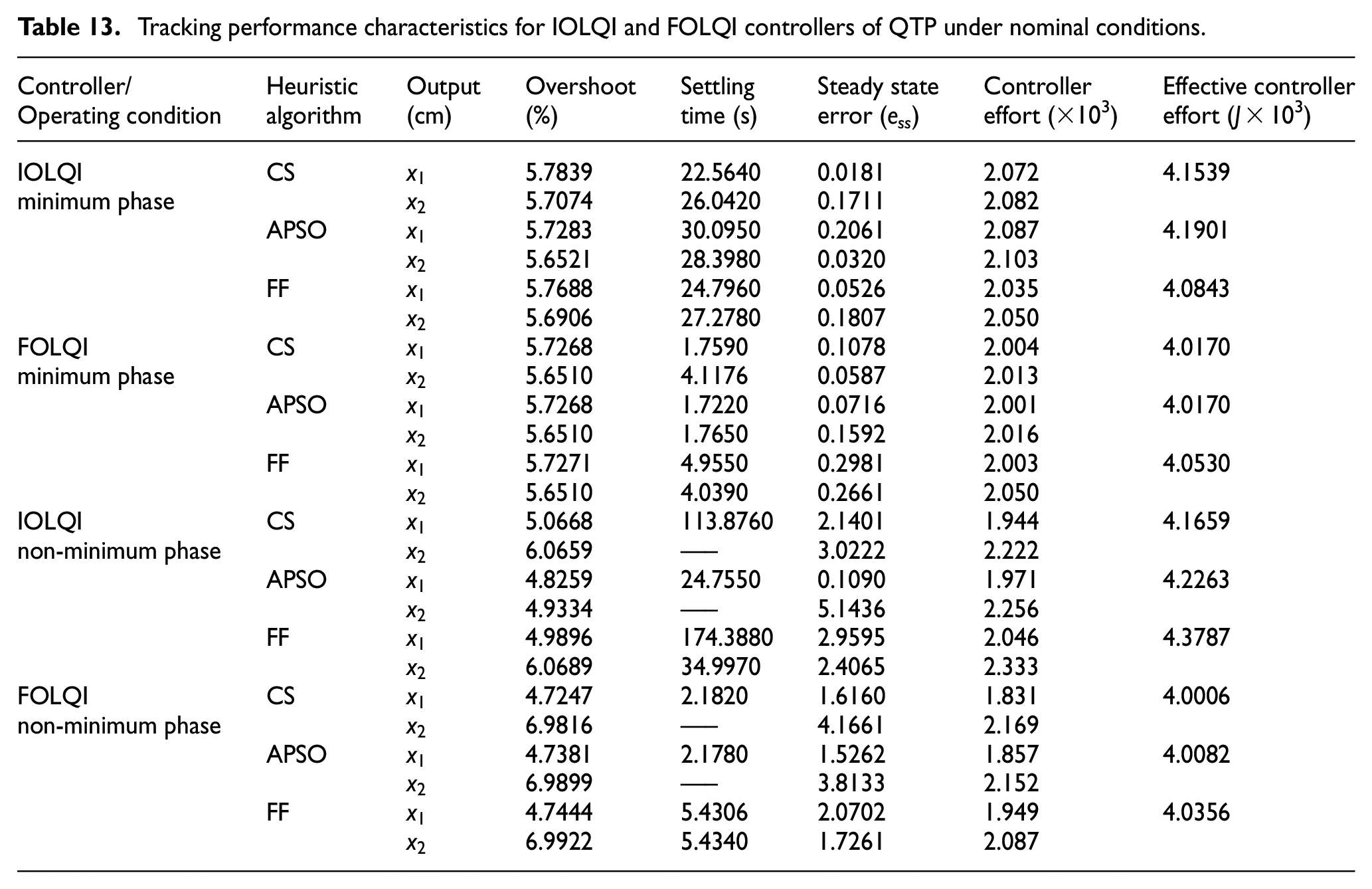
Tracking performance characteristics for IOLQI and FOLQI controllers of QTP under nominal conditions.
Tracking performance characteristics for IOLQI and FOLQI controllers of QTP under disturbance conditions.
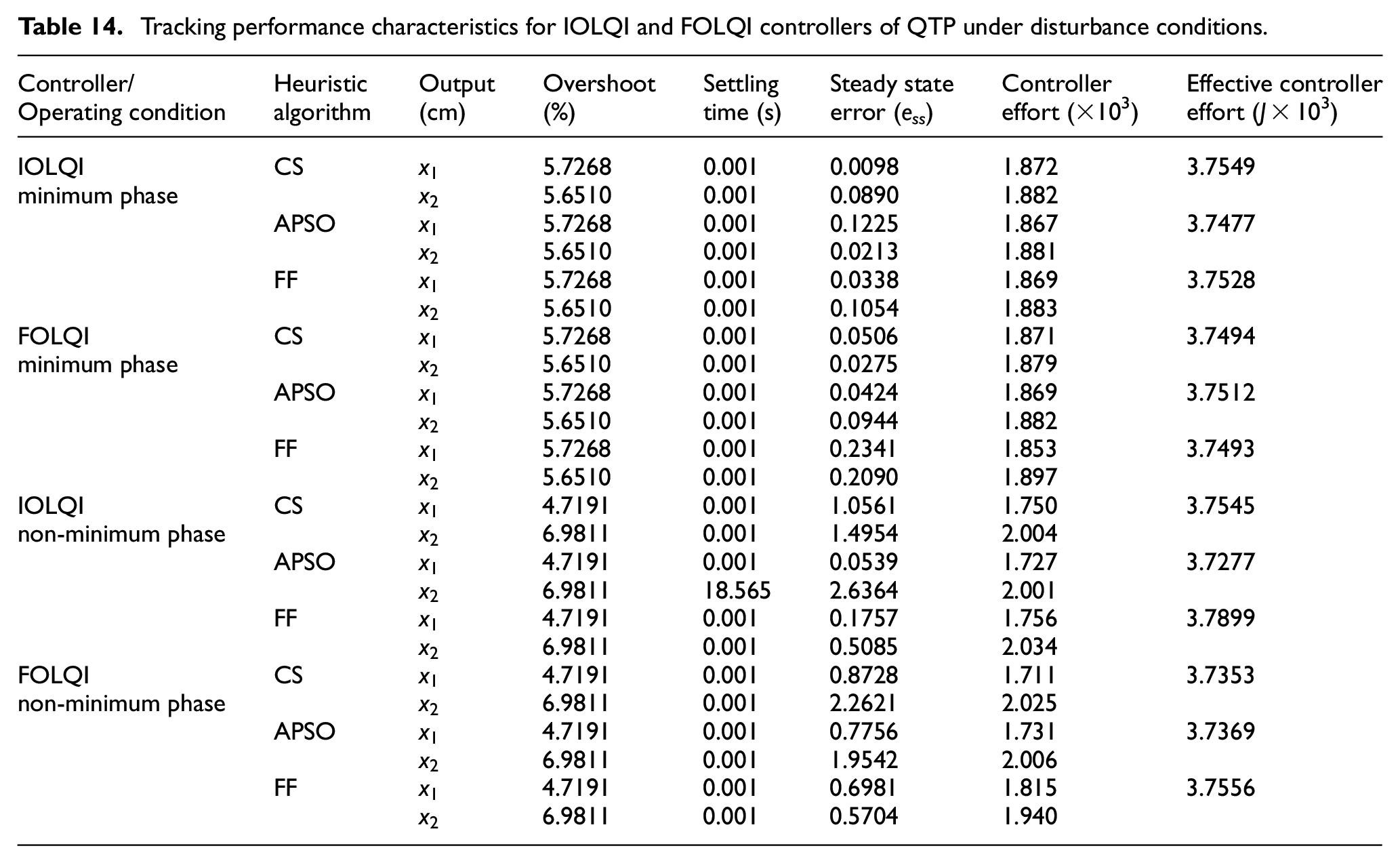
From the table, it is observed that (i) under nominal condition of minimum phase operating mode shown in Table 13, for both IOLQI and FOLQI controllers tuned using CS, APSO and FF algorithms meet the required time specifications whereas in non-minimum phase of operating mode only FOLQI controller tuned using FF algorithms meet the required time specifications (ii) under output disturbance condition, for all the mode of operating condition shown in Table 14, both IOLQI and FOLQI controllers meet the required time specifications.
Conclusions
In this paper, various heuristic algorithms such as CS, APSO and FF were used to tune the FOLQI controllers for QTP under continuous load disturbance condition. The constrained optimisation problem was formulated and solved using these presented heuristic algorithms. Simulations were performed for minimum and non-minimum phase operating modes of QTP under disturbance and parameter uncertainty conditions. To show the superiority of FOLQI controller, the results were compared with optimally tuned IOLQI controller using heuristic algorithms. From the simulation, it is observed that (i) FOLQI controller outperforms IOLQI in terms of
The future directions of this research can be extended to (i) validate the performance of heuristic algorithms on other practical systems (ii) explore on any promising heuristic algorithms for tuning optimal FOLQI controller parameters.
Footnotes
Ethical declarations
Hereby, the authors solely assure that for this manuscript “Heuristic algorithms based optimal tuning of FOLQI controller for quadruple tank process under disturbance conditions” the following ethics are fulfilled:
(1) This manuscript is the authors own work, which has not been published or currently being considered elsewhere for publication.
(2) The authors own contribution in research and analysis of the problem is presented in a truthful manner.
(3) All citation sources are disclosed properly.
(4) The contribution of all authors have been actively involved in this work.
(5) All the software used while preparing this manuscript is originally licenced by the institution “Indian Institute of Space Science and Technology, Thiruvananthapuram, Kerala, India”.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.