
Abstract
This article proposes a multiple-step fault estimation algorithm for hypersonic flight vehicles that uses an interval type-II Takagi–Sugeno fuzzy model. An interval type-II Takagi–Sugeno fuzzy model is developed to approximate the nonlinear dynamic system and handle the parameter uncertainties of hypersonic firstly. Then, a multiple-step time-varying additive fault estimation algorithm is designed to estimate time-varying additive elevator fault of hypersonic flight vehicles. Finally, the simulation is conducted in both aspects of modeling and fault estimation; the validity and availability of such method are verified by a series of the comparison of numerical simulation results.
Keywords
Introduction
Hypersonic flight vehicle (HFV) is a kind of vehicle that flies at a velocity of five times the speed of sound (Mach 5); safety is of greatest significance in flight vehicles, so more and more efforts are focused to improve the security of HFV. 1,2 HFVs are very sensitive to changes of flying conditions by reason of the particular structure and aerodynamic performance of high speed and unusual altitude; and the HFV is highly nonlinear with unexpected uncertainties, hence it is a challenging task to develop an additive fault estimator for the HFVs. Some flights such as X-43, X-51, and Hypersonic Technology Vehicle (HTV) have been tested but failed in the past 15 years, which means the controller design of HFVs is extremely crucial, especially the elevator fault-tolerant controller; therefore, the estimation of elevator fault is important for hypersonic vehicle.
In recent years, numerous control schemes have been proposed for air-breathing hypersonic vehicles, such as adaptive control, 3 neural network–based dynamic surface control, 4 and sliding mode control. 5 Besides, backstepping control is a very common technique for HFVs control; however, it has a large amount of calculation. Xu et al. proposed an adaptive neural control method that is based on minimal-learning-parameter used in their study, 6 and the advantage of this approach is that need to construct the virtual control. Under the actual control situation, unexpected incipient failures are common in many important parts. For example, time-varying additive faults often happen on sensors and elevators which may lead to flight accidents. 7 It is important to redouble our efforts on the fault estimation and fault-tolerant control (FTC) of HFVs. In the study by Hu et al., 8 an optimization-based reference reconfiguration method is given, which can solve the actuator saturation fault. In the study by Zhang et al., 9 the researchers present a dynamic adaptive neural network–based FTC scheme. Lei et al. proposed a state feedback method for HFV with sensor fault. 10 Some works for stuck fault, partial actuator failures can be found in the study by Yu et al. 11,12 Such control schemes are passive FTC, which are robust against possible faults. However, without fault information, the passive FTC is more conservative, making the active FTC helpful for HFVs with actuator fault. Therefore, how to obtain more accurate fault value is investigated in this article. For FTC, the tracking error and fault estimation error are important indices, so how to obtain such errors is a significant work. To address this problem, Wu et al. 13 proposed an adaptive fuzzy controller for perturbed strict-feedback nonlinear systems which can obtain the ultimate tracking errors. The latest developments on FTC of HFVs in recent years could be found in the literature. 14–15 It is well known that premise information of fault has great realistic significance for hypersonic FTC, hence this article will focus on estimating the elevator fault of hypersonic.
Before estimating the time-varying elevator fault, it is necessary to construct a reliable model for HFVs. Takagi–Sugeno (T-S) fuzzy system modeling is one of the most prominent tools that can identify the behavior of high nonlinear systems.
16
During the last few years, the T-S modeling technique has been applied to describe the hypersonic attitude dynamics such as described earlier in the literature.
17
–20
However, uncertainties may exist in the modeling progress because of many factors such as the lack of sufficient experiment data, high-order modes that are ignored, and unknown disturbances existing during flight. Besides, the change of elastic structure model and the consumption of the fuel during the flight will also lead to parameter uncertainties. Such uncertainties are harmful to maintain the performance of the hypersonic control and even lead to unexpected results, especially in some cases of time-varying additive actuator faults.
21
The parameters Ai are assumed to have 10% perturbation, and such perturbation are expressed as
In order to estimate the time-varying additive fault, the multiple-step actuator fault estimation approach based on the study by Huang et al. 25 and Zhang et al. 26 is applied to HFV. Through the multiple-step time-varying elevator fault estimation scheme, the obtained fault estimates can practically approximate the time-varying additive faults. Given the good approximation performance of I-T-II T-S technique and the accurate estimation capacity, the proposed I-T-II T-S-based multiple-step fault estimation (MS-FE) scheme can be applicable to estimate the actuator fault of any nonlinear system which is difficult to determine the memberships.
The main contribution of this article can be summarized as follows: The I-T-II T-S fuzzy model for HFV in consideration of actuator time-varying fault and external disturbances is presented in this article. The type-II T-S fuzzy sets can provide additional redundancy in modeling progress, which enhances the capability of the system to handle parameter uncertainties. An MS-FE algorithm is proposed in light of the works by Huang and Yang
25
and Zhang et al.
26
Several conditions of fault value in Liu et al.
27
such as
This article is organized as follows: Section “Hypersonic flight vehicle model description” briefly recalls the complete hypersonic longitudinal model and describes the I-T-II T-S system with actuator faults. In “Multiple-step actuator fault estimation approach,” an MS-FE algorithm is applied to the fuzzy fault model. In “Simulations and experiments” section, several simulations are conducted to verify the validity of the proposed modeling method and the MS-FE scheme. Final section draws the conclusions.
HFV model description
In this section, an HFV dynamic model is described according to the fore passed modeling works of HFVs and the I-T-II T-S fuzzy model is developed by fuzzy IF-THEN rules.
Hypersonic longitudinal dynamic model
HFV is a complex system with six-DOF. The geometry of the hypersonic flight vehicle is shown in Figure 1. The most common model of HFV is developed by NASA Langley Research Center. The primary consideration of control of HFVs is the longitudinal dynamics, including the velocity, flight-path angle, altitude, pitch angle, and pitch rate. The longitudinal nonlinear dynamics of a general HFVs model considered in this work are as follows 20


Geometry of the hypersonic vehicle model.
with
where the rigid-body states V, γ, h, α, θ, and q denote velocity, flight-path angle, altitude, attack angle, pitch angle, and pitch rate, respectively; L, D, T, and Myy represent lift-force, drag, thrust, and pitching moment, respectively; m, Iyy, S, μ, and Re stand for the vehicle mass, moment of inertia, reference area, gravity constant, and the earth radius;
The velocity denoted by V is mainly associated with the throttle setting β and the altitude denoted by h is mainly influenced by the elevator deflection δe. Therefore, the longitudinal system can be decomposed into the velocity subsystem and the altitude subsystem, hence the velocity controller designing can be separated from the altitude controller designing. And the dynamic engine model can be formulated as

where βc is the throttle setting of engine. According to the above narration, it is obvious that the HFV longitudinal system is nonlinear, and parameter uncertainties should also be considered in the modeling progress; therefore, the I-T-II T-S model is applied to the longitudinal system in the next part of this article.
I-T-II T-S model with actuator faults
For HFVs, actuators, including elevators and the throttle, are the most important components. The elevator gain loss fault and additive fault are common failure modes in actual situations. The model of actuators can be shown as
A type-II fuzzy linear dynamic model which was proposed by Mendel and described by several fuzzy rules will be adopted to deal with the nonlinear system of HFV. The i th rule of the I-T-II fuzzy model for HFV with elevator fault is described as the given form

where

where
The mark

where
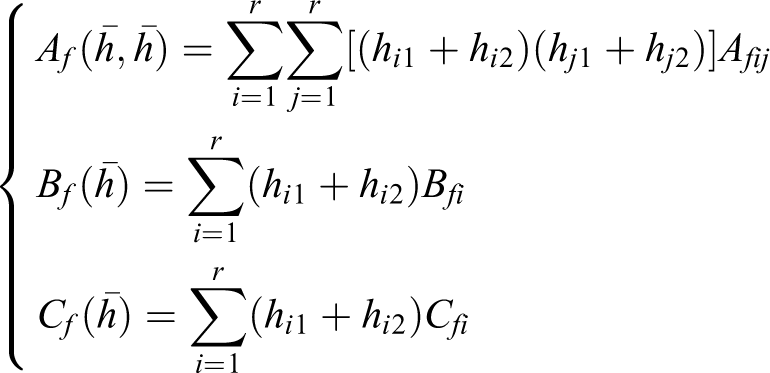
Finally, the I-T-II T-S fuzzy model of HFVs longitudinal system with elevator faults can be simplicity rewritten as following notations

where







and

Remark 2.1
Traditional T-S fuzzy modeling technique is widely adopted to approximate the high nonlinear hypersonic longitudinal dynamic model; however, parameter uncertainties are inevitably exist in the T-S fuzzy model. Different with the common T-S model, I-T-II fuzzy modeling technique makes the membership functions also fuzzy, so the uncertainty range can be captured by the secondary membership functions. Hence, the I-T-II fuzzy system considered here is more applicable than the original form.
Up to this point, the type-II T-S fuzzy model of HFV has been established as described in equation (5), and it is the basis of the time-varying elevator fault estimation in the next parts.
Multiple-step actuator fault estimation approach
In this subsection, an MS-FE approach is developed according to the aforementioned work by Huang and Yang 25 and Zhang et al. 26 With such fault estimation method, the estimation result can approximate the true value more precisely while the rapidity is guaranteed. The whole estimate scheme is shown in Figure 2.
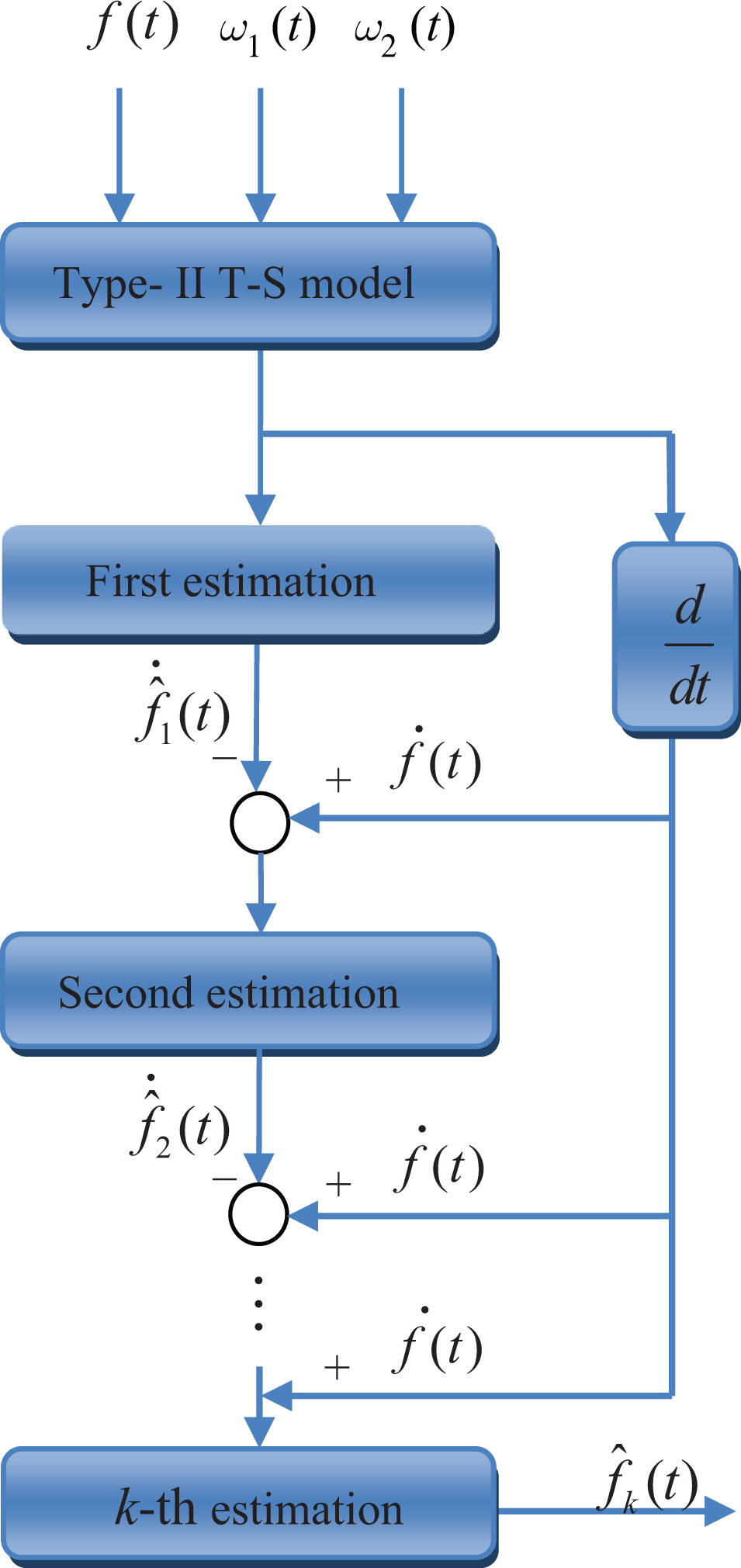
Diagram for the estimation scheme.
According to the existing fault estimation observer,
26
one can obtain the information of

where
Denote that

where
Assumption 3.1
The time-varying additive elevator fault satisfies that
Remark 3.1
The time-varying additive elevator fault is viewed as a disturbance in this method. The additive fault
Theorem 1
For the matrix

and

where
Proof
At first, an important lemma used in this article should be introduced as following.
Lemma 1
For each of the system matrix

Substituting

then setting

where


since
Theorem 2
The k th


where
Proof
For the k th

where tf means the moment of the failure. Then, the following formulae can be deduced

For the convenience of analysis, one can denote that


where

By the Schur complement, (18) implies that (14) and (15) hold, therefore the k th error dynamics is asymptotically stable while achieving the expected index.
Remark 3.2
In this method, the estimate of each step is used for next estimate step, just like a kind of “iteration.” Through this method,
Remark 3.3
Compared with some existing methods, the proposed fault estimation scheme has the following advantages: (1) an I-T-II T-S model is constructed in this article, the double fuzzy membership grades possess better approximation performance than T-S system
31
–33
; (2) when the elevator break down, the derivative of fault value is limited, so the condition
Simulations and experiments
Several comparative simulations are provided in this section to demonstrate the effectiveness of the proposed I-T-II T-S model and the MS-FE algorithm. To begin with, the HFV modeling via I-T-II T-S fuzzy technique and some analysis are given in section “Interval type-II T-S modeling of hypersonic longitudinal dynamic system”; in “Fault estimation results” section, the common matrix P and the matrix L1 of the first working point obtained by MATLAB toolbox are given at first, and then the fault estimation results according to the MS-FE scheme are presented. Finally, such estimated results are offered to the dynamic output feedback FTC scheme (DOF-FTC) which is mentioned in the literature, 26 and the control results of α are presented in “DOF-FTC performance using the k-th estimation result.”
I-T-II T-S modeling of hypersonic longitudinal dynamic system
As a representative case study, the initial condition of the vehicle is
The concrete parameters of Ai and Bi can be found in the literature. And it is assumed that the perturbation of parameters are 10% since there may exist uncertainties in modeling process. Meanwhile, disturbance distribution is chosen as
Fuzzy membership functions of interval type-II fuzzy system.
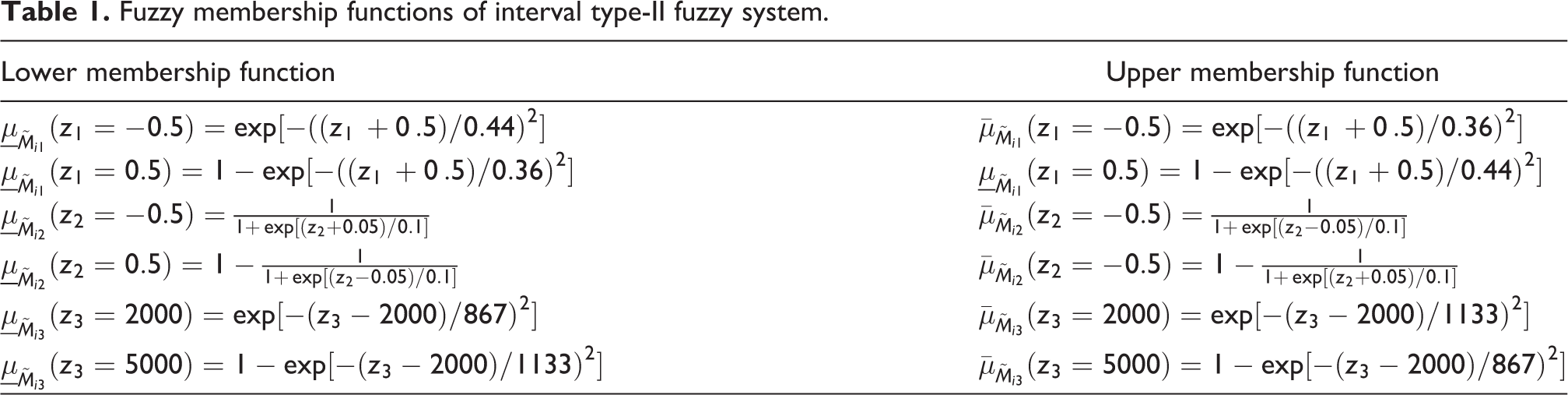
In order to describe the membership functions more clearly, three-dimensional curves of them are shown in Figures 3
–5, where the y-axis shows primary membership function and z-axis is the secondary membership, respectively. From such figures, we can see that all of the secondary memberships of the so-called I-T-II T-S system are equal to one 


The membership function of

The membership function of

The membership function of
Fault estimation results
By solving the matrix inequalities (8), (9), (13), and (14) through the MATLAB toolbox, not only the matrix P but also F1 and L1 of the first working point of the hypersonic longitudinal dynamic system can be calculated

For hypersonic vehicles, elevators and accelerator are actuators which may be failure, and the throttle gets fault less likely, so we consider the time-varying elevator additive fault as following:
Case 1:

Then, the fault estimation response under the MS-FE method for the I-T-II T-S hypersonic system is shown in Figure 6, and the conventional adaptive fault estimation method for I-T-II T-S fuzzy hypersonic system and conventional FE method for T-S hypersonic flight system are presented in Figures 7 and 8, respectively.

Elevator fault and its estimation (three-step fault estimation method for interval type-II fuzzy hypersonic system).

Elevator fault and its estimation (conventional adaptive fault estimation method for I-T-II T-S fuzzy hypersonic model).

Elevator fault and its estimation (conventional adaptive FE method for T-S hypersonic system).
From Figures 6 to 8, it is easy to see that the hypersonic elevator additive fault occurred at 4 s, then by the proposed I-T-II fuzzy system of hypersonic vehicle and the MS-FE method, the time-varying additive actuator fault can be fitted more quickly and more precisely than the conventional adaptive fault estimation approach with T-S fuzzy model in the study by Xu; as we all know, shorter time for estimation, more fault-tolerant time can be saved. Consequently, through the comparison, we can verify that with the I-T-II fuzzy system of hypersonic vehicle and the MS-FE scheme, more time can be saved and more precise fault value can be provided to control the fault, which perhaps is very helpful for hypersonic vehicles.
Next, simulations are conducted to compare with the existing fault estimation algorithms in the earlier studies. 20,25 Only the elevator is assumed to incur a fault at one time in these two cases. The failure situations can be described as follows:
Case 2 20 :

Case 3 26 :

The simulation results are presented in Figures 10 –13, respectively.

Elevator fault estimation errors.

Fault estimation results using a different estimation algorithm (case 2).

Fault estimation results using a different estimation algorithm (case 3).

Fault estimation errors (case 3).

Response curve of α with time varying fault for interval type-II fuzzy hypersonic system.
In Figure 10, the three-step fault estimation algorithm is compared with the adaptive fault estimation algorithm in the study by Shen et al., 20 and the method in this article shows smaller estimation error than the existing algorithm. In Figures 11 and 12, the three-step fault estimation result is compared with the existing algorithm in earlier study, 26 and one can see that the three-step fault estimation algorithm can approximate the true value quickly, and the estimation error doesn’t have fluctuations like the previous algorithm.
Therefore, the abovementioned fault estimation performances and comparisons demonstrate the effectiveness of the I-T-II T-S model and the three-step fault estimation method against the time-varying fault conditions.
DOF-FTC performance using the k-th estimation result
In order to further prove the effectiveness of the aforementioned I-T-II fuzzy system, the dynamic output feedback FTC scheme which is proposed in the literature 26 is applied to such system, then the I-T-II T-S dynamical output feedback controller is constructed as

and
where




Ultimately, the response curves of angle of attack under the I-T-II fuzzy hypersonic system with constant elevator fault and the time varying fault are presented, respectively, in Figure 10.
As shown in Figure 13, it is clearly that the response curves of α under the I-T-II T-S fuzzy model and the DOF-FTC have approximate to the expected value at about 5 s, hence the I-T-II modeling scheme which we used is more useful for hypersonic while the accuracy of complicated model is difficult to be guaranteed. To sum up, the aforementioned simulation results clearly demonstrate the availability of the presented I-T-II fuzzy model of hypersonic vehicle.
Conclusions
The objective of this article is to provide more accurate time-varying elevator fault estimation performance for FTC of HFVs. To fulfill this task, an I-T-II T-S fuzzy model for hypersonic longitudinal dynamic model was developed, which is helpful to deal with the parameter uncertainties. An MS-FE approach is proposed for the elevator additive faults. In such algorithm, the k-step fault estimation observer is designed based on the
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: The project was supported by the the National Natural Science Foundation of China (61533009, 61374130, 61473146), a project funded by the Priority Academic Programme Development of Jiangsu Higher Education Institutions.