
Abstract
In this article, an adaptive fault tolerant control strategy is proposed to solve the trajectory tracking problem of a generic hypersonic vehicle subjected to actuator fault, external disturbance, and input saturation. The longitudinal model of generic hypersonic vehicle is divided into velocity subsystem and altitude subsystem, in which dynamic inversion and backstepping are applied, respectively, to track the desired trajectories. For the unknown maximum disturbance upper bound, actuator fault, and input saturation constraint, adaptive laws are proposed to estimate these information online. Finally, numeric simulation is conducted in the cruise phase for generic hypersonic vehicle. Simulation results show that the controllers designed in this article can make generic hypersonic vehicle track the desired trajectories in the presence of actuator fault, external disturbance, and input saturation.
Introduction
Hypersonic flight vehicles (HFVs), which possess good advantage in military and civil application owing to its high flight speed and cost-effective capability in space access, have become a research hot spot. However, designing controllers for HFV poses numerous challenges mainly caused by its highly coupled and nonlinear nature as well as flight conditions. The control system of HFVs is sensitive to the changes of flight conditions and its physical or aerodynamic parameters since they are always flying in near space areas at a high Mach numbers. Although there are great amounts of research on HFVs, 1 –3 it is still enormously worth to study control strategy for HFVs.
Scholars have made numerous studies on the longitude dynamics of HFVs based on nonlinear and adaptive control in the last decade. Input output linearization technology is firstly applied to simplify the complex coupled longitude model as a two-input and two-output system, and a sliding mode surface with respect to tracking error is then proposed with vehicle mass uncertainty, aerodynamic parameters uncertainty, wing area uncertainty, and so on considered. 4 Controllers based on sliding mode technology can efficiently reject system disturbance; however, chattering is an inevitable phenomenon causing great damage to actuators. For chattering reduction purpose, a high-order sliding mode control strategy is proposed by Wang et al. 5 To deal with the external disturbances for HFVs, sliding mode controller combined with an observer is implemented by Chen et al. 6 Recently, increasing attention is paid on finite time controllers 7,8 for their advantage of higher control accuracy and enhanced convergence speed over other control methods. In the study of Sun et al., 9 a novel finite time controller with disturbance observer is designed to cope with tracking problem while there are unknown disturbance and uncertainty in generic hypersonic vehicle (GHV) system. Besides the issues mentioned above, dynamic surface control is widely applied for HFVs. 10 –12 Trajectory tracking problem is analyzed by using backstepping, in which intelligent algorithm with much less computation burden is applied by Xu et al. 13,14 Neural network-based dynamic surface control strategy is applied in the HFV system. 15,16 Compared with the traditional dynamic surface control, neural network can estimate the complex control gain and system uncertain online, which need less information about the longitude dynamics. Dead-zone input nonlinearity is such common trouble that the HFV system is always trapped in, which makes the key factors considered in controller designing procedures greatly different. In the study of Xu, 17 a novel neural network method is used to compensate for dead-zone input nonlinearity. Moreover, the output magnitude of actuators is under some certain constraints because of the characteristics of the mechanical structure. In the study of Tian et al., 18 a robust adaptive controller is proposed with input constraints, external disturbance, and system uncertainty taken into consideration, in which the effect of input saturation is eliminated by an adaptive law. Inspired by the work of Chen et al., 19 different methods coping with the saturation problem for HFVs have been adopted. 20 –22
However, the aforementioned controllers are designed based on the assumption that HFVs are working without actuator faults. As the flight conditions always change rapidly, the dynamics of HFVs inevitably suffer from actuator faults. It is extremely urgent to design controllers considering actuator faults. An adaptive controller dealing with tracking problem for GHV encountered actuator efficiency loss is constructed, so that the system can complete flight mission perfectly. 23 However, only actuator effectiveness loss fault is considered.
In this article, adaptive dynamic inversion and backstepping method are exploited, respectively, to fulfill the need of tracking problem of GHV with actuator effectiveness loss fault, actuator drift fault, external disturbance, and input saturation constraint. This article can be divided as follows: The longitudinal model of GHV is established in the following section. In “Controller design” section, dynamic version controller and fault tolerant controller are developed for velocity subsystem as well as altitude subsystem, respectively. Furthermore, the feasibility of the controllers is proved as well. Numerical simulations are exhibited in “Simulation” section. Finally, this article ends up with some concluding remarks.
Longitudinal model of hypersonic vehicle and problem formulation
Vehicle model with actuator fault
In this article, the longitudinal model of a GHV can be established as follows 1





where












with
Most of the existing works on GHV are laying focus on nonlinear output tracking control with the assumption that the actuators work under nominal conditions, which ignores the actuator faults posing huge possibility to cause some catastrophic failures. Therefore, increasing emphasis is put on accurate and reliable control for GHV in the presence of actuator faults. In this article, actuator effectiveness loss fault, actuator drift failure, external disturbance, and control input saturation constraint are taken into consideration, which can be expressed as

where


u1 is the control input, u1 max is the maximum control input satisfying u1 max > 0, ρ1 represents the unknown effectiveness factor of actuator satisfying
Problem formulation
The control objective of this article can be described as designing control laws for GHV such that the desired velocity and altitude trajectories could be tracked in the presence of actuator fault, external disturbance, and input saturation. The following assumptions are applied for the convenience of controllers design.
Assumption 1
The external disturbances and additive actuator fault are supposed to satisfy
Controller design
Based on functional decomposition, the longitudinal model can be divided into velocity subsystem and altitude subsystem. For velocity subsystem, dynamic inversion is applied to design controller as described by Xu. 17 However, adaptive fault tolerant controller is developed for the altitude subsystems. By transforming a given altitude command hd into the desired flight path angle, it can be obtained

where kh is a positive scalar. Note that the flight path angle
To simplify the design of fault tolerant control law, one can transform the altitude subsystems (2) to (5) into a strict-feedback form by defining

where ϑp = α + γ. Therefore, the altitude subsystem can be formulated as follows 23

where

Assumption 2
There is an upper bound for g1(V), that is,
Assumption 3
χ1(u1) always satisfies
For the strict-feedback system (21), the procedures of the controller design can be expressed as follows:
Step 1. For x1,

Introduce a virtual control x2c, which is defined as

where k1 and k2 are positive constants; r = r1/r2, and r1 and r2 are positive odd integers with r1<r2. A new state variable x2d is developed to obtain the differentiation of x2c by introducing a first-order filter

where ε2 > 0 is a constant.
Step 2. For x2, by introducing

To stabilize equation (26), the virtual control x3c can be chosen as

where k3 and k4 are positive constants. A first-order filter is defined as

where ε3 > 0 is a positive constant.
Step 3. Without considering control input saturation constraint, by defining



where k5 and k6 are positive constants.
With the basic fault tolerant control laws (29) to (31), adaptive law is constructed to estimate the unknown parameters. Adaptive fault tolerant controller is presented as






where
Theorem 1
Consider the system described in equations (2) to (4). By applying the proposed control schemes (32) to (37), the state error
Proof
Lyapunov function candidate is selected as

with Si satisfying
The differential of yi, i = 2,3 can be written as

It can be obtained from the study of Xu et al. 27 that there exist constants oi > 0, i = 2, 3 with

where oi are unknown positive constants. The time derivative of Si results in


With the application of equations (32) to (37), the time derivative of S3 results in
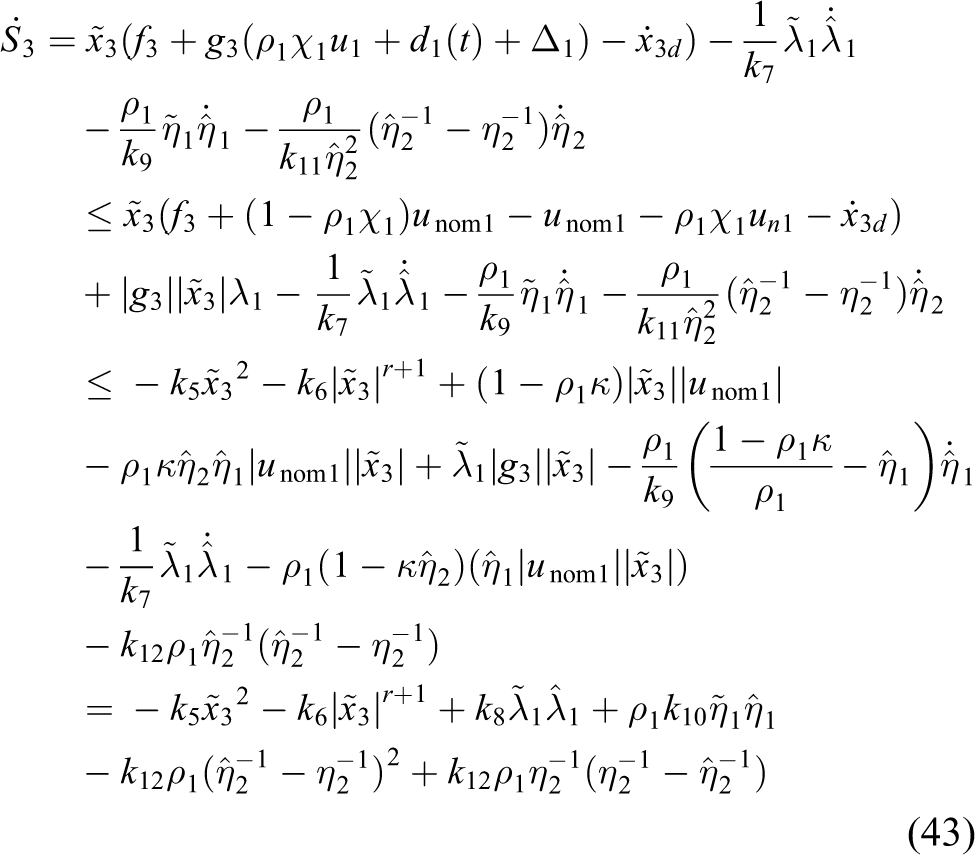
Noting that

where δ2, δ31 > 0.5. Therefore, equation (43) can be expressed as

where


For the differential of S0, one obtains

where




Also, k1, k2, k3, k4, k5, k6, k7, k8, k9, k10, k11, and k12 are chosen, so that ϑj satisfies ϑj > 0. It can be concluded that
Remark 1
The proposed control laws can cause chattering problems as sign function is used. Control chattering can be dealt with by defining a thin boundary layer of width φ2 = 0.2, and boundary layer function is introduced to replace sign function

Simulation
Effectiveness of the proposed controllers is verified by numerical simulations conducted on the longitudinal dynamics of the GHV in its cruising phase with the initial conditions: h = 110,000 ft, V = 15,060 ft/s, and


The external disturbance can be presented as

The initial value of states is chose as the same as cruising conditions while the initial adaption parameters and control gains are chosen as follows



Simulation results are elaborated in Figures 1 to 4. Figures 1 and 2 depict the tracking responses of velocity and altitude, from which it can be observed that altitude and velocity can track the step commands in spite of external disturbance, actuator fault, and input saturation. For control inputs throttle setting and elevator deflection in Figures 3 and 4, it is obviously observed that outputs of the controllers (32) to (37) are within the maximum allowable values of the actuator. Simulation results show that velocity and altitude can track the desired command trajectories with a good performance in spite of external disturbance, actuator fault, and input saturation.

Response to a 15,160 ft/s step velocity command.

Response to a 110,100 ft step altitude command.

Throttle setting of engine β.

Elevator deflection angle.
Conclusion
This article investigates adaptive control method for the cruising GHV to track desired trajectories when actuator fault occurs and external disturbance exists under input saturation. Based on functional decomposition, adaptive dynamic inversion controller is proposed for velocity subsystem while controller is designed based on backstepping for altitude subsystem. The adaption laws are utilized to estimate the values of actuator faults and external disturbances. Simulation results reveal that the designed controllers can finish tracking missions with good performance.
In the further research work, control scheme design for GHV will consider actuator faults with input saturation problem and multiple faults occur simultaneously.
Footnotes
Acknowledgement
The authors thank Yixin Cheng for his useful discussion on controller design and stability analysis.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61622308), Aeronautical Science Foundation of China (20130753005, 2016ZC53019 and 2015ZA53003), Natural Science Basic Research Plan in Shaanxi Province (2016KJXX-86), Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417), and Xi’an Flight Automatic Control Research Institute.