
Abstract
In this paper, the consensus of nonlinear multi-agent systems (MASs) is discussed, considering actuator fault and switching topology in the presence of communication noise. The actuator fault and communication noise are both considered to be random. The switching of the topologies is considered random as well. These issues are handled by Distributed Nonlinear Dynamic Inversion (DNDI), which is designed for Multi-Agent Systems (MASs) operation. The convergence proof with actuator fault is provided, which shows the robustness of the controller. The simulation results show that DNDI successfully dealt with the actuator fault and communication events simultaneously.
Introduction
Multi-Agent Systems (MASs) is a useful platform to execute complex tasks like surveillance, search and rescue, delivery, fire-fight etc., which must be performed cooperatively, and the agents must achieve consensus among themselves. The information shared by the agents with its neighbour is utilised to compute the values of the consensus protocols. These protocols are designed using the different branches of control theory, considering the agent dynamics and communication topology. Many researchers have addressed the consensus problem in their work which can be identified in a few categories like flocking, 1 formation control 2 and synchronisation 3 are some of the examples.
In a real-world scenario, the agents face difficulties to achieve the consensus among themselves. The difficulties occur due to 1. issues affecting the communication among the agents, 2. internal faults and 3. external disturbances. The most common issues associated with MASs communication are switching topology, noise and delay. The common internal fault is the actuator fault. The external disturbance occurs due to events in the operating environment like a wind gust. In this paper, we will restrict our discussion to switching topology, communication noise and actuator fault. A brief literature survey about these topics is presented in the following paragraphs.
The primary reasons behind the switching topology are, change in surroundings, limited communication range or link failure. A few examples of research papers that discussed switching topology while designing the consensus protocol are mentioned here. Wen et al. 4 addressed the distributed consensus tracking problem for agents having Lipschitz-type node dynamics. The problem was formulated considering changing topology among followers. Kim et al. 5 discussed the consensus problem for heterogeneous multi-agent systems. They considered the communication with probabilistic link failure and presented using a Bernoulli probability sequence. Ding et al. 6 discussed the consensus problem of nonlinear multi-agent systems subjected to Markovian switching topologies. Liu et al. 7 presented the leaderless consensus problem of MASs considering switching communication topology. Xia et al. 8 described the leader-following consensus problem, and they considered switching topology in their study.
In addition to switching topology, communication noise creates difficulties to achieve the consensus. It is stochastic in nature and perturbs the agent information. Chen et al. 9 proposed a mean square consensus protocol for MASs. In their study, they considered fixed communication topologies and channel noise. Wang et al. 10 presented the consensus problem considering communication noises. The agent dynamics were linear. A consensus algorithm for multi-agent with noisy communication is proposed by Morita et al. 11 Liu et al. 12 studied the consensus of MASs, and the communication among them was subjected to noise.
There are papers where authors have studied the effect of switching topology and communication noise simultaneously. Kar et al. 13 described the consensus of MASs, where they included communication link failures and channel noise in their study. Wang et al. 14 presented the consensus of MASs subjected to both Markovian switching topologies and communication noise. Ming et al. 15 presented the communication among the agents as Markovian switching topologies. They included stochastic communication noise as well. Li et al. 16 presented the consensus of MASs, where the agent communication is subjected to Markovian switching along with communication noises. Also, necessary and sufficient conditions for the consensus are derived. In another work, 17 the same authors considered random switching topologies in their study along with communication noise.
In addition to communication issues, the agents may experience faults during the execution of a complex mission, which results in failure. The consensus protocol should handle the fault such that the agents continue the mission with the fault. The controller should be robust enough to compensate for the effects of the faults. One primary requirement of fault-tolerant control is to ensure acceptable performance and desired safety and reliability. There exist a few papers which discussed the actuator faults in the consensus problem.
Saboori et al. 18 proposed fault-tolerant consensus control for agents having linear dynamics. The distributed fault-tolerant consensus problem for uncertain linear multi-agent systems using the adaptive protocol is described by Ye et al. 19 Qin et al. 20 presented the consensus tracking problem of second-order nonlinear multi-agent systems (MAS) with disturbance and actuator fault using the sliding mode control. Wang et al. 21 described the leader–follower consensus problem. They considered uncertain systems having nonlinear dynamics and actuator fault. Sakthivel et al. 22 addressed the leaderless consensus problem for a class of continuous-time MASs. The agents are subjected to time-varying actuator faults. Trivedi et al. 23 proposed a fault-tolerant consensus of nonlinear MASs. The authors consider communication topologies to be directed. They also considered communication noise and actuator faults. Wang et al. 24 presented an adaptive consensus tracking control scheme. They considered high-order nonlinear agents having unknown time-varying actuator faults. Li et al. 25 described the consensus problem for Lipschitz nonlinear multi-agent systems subject to actuator faults.
All of these papers implemented robust and adaptive controllers to handle the actuator fault. In this paper, we have implemented Nonlinear Dynamic Inversion (NDI) based distributed controller DNDI, 26 which can handle the actuator faults. It also can address communication issues like switching topology and noise. The NDI is a robust state feedback nonlinear control law that can be used to design the fault-tolerant consensus protocol. A brief overview of NDI is presented in the following section.
Nonlinear Dynamic Inversion is regarded as a powerful tool that is useful to design controllers for nonlinear plants. The philosophy behind NDI is to use feedback linearisation theory to remove the nonlinearities in the plant. Also, the response of the closed-loop plant is similar to a stable linear system. There are many advantages to using an NDI controller. Some of them are closed-form control expression, easy mechanisation, global exponential stability, the inclusion of nonlinear kinematics in the plant inversion and minimisation of the need for individual gain tuning or gain scheduling.
Dynamic inversion is used to design controllers for many applications. Enns et al. 27 implemented NDI to design a flight controller. A controller for autonomous landing of UAV was described by Singh et al. 28 using NDI. Padhi et al. 29 presented Partial Integrated Guidance and Control (PIGC) to describe reactive obstacle avoidance of UAVs using neuro-adaptive augmented dynamic inversion. A formation flying scheme is proposed by Mondal et al. 30 where the NDI controller is used to track the desired attitude commanded by the leader. Caverly et al. 31 used dynamic inversion to control the attitude of a flexible aircraft. Horn et al. 32 presented a control design study using dynamic inversion. Lombaerts et al. 33 solved an attitude control problem of a hovering quad tiltrotor eVTOL vehicle using an NDI controller.
The contribution in this paper is given as follows. • In this paper, we have applied the NDI-based controller, DNDI, to solve nonlinear agents’ consensus problem with actuator fault. DNDI inherits all the advantages of NDI and designed for MASs operations. • The convergence study of the controller with faults is presented. The mathematical details provide a solid theoretical base. • The performance of the controller is evaluated, considering switching topology and communication noise. We have relaxed the restriction on the number of switching topologies. The user can scale it, as it is often in real cases. Also, switching and noise are considered random.
The rest of the paper is organised as follows. Preliminaries are given in Preliminaries. The problem description is given in section Problem Description. The mathematical details of the DNDI are shown in section Distributed Nonlinear Dynamic Inversion controller for Consensus of MASs. The convergent study is presented in section Convergence of DNDI in the presence of fault. The simulation results are discussed in section Results. Finally, the conclusion is given in section Conclusion.
Preliminaries
A brief description about the topics required for this work is discussed in this section.
Consensus of MASs
A general definition of the consensus of networked MASs can be given as follows.
Let us consider a MASs with N agents, where X
i
, (i = 1, 2, 3, …, N) denotes the states of the i
th
agent. The MASs will achieve the consensus if ∥ X
i
− X
j
∥ → 0, ∀i ≠ j as t → +∞. The objective of the consensus protocol is to minimise the consensus error in similar states of the agents by sharing information with its neighbours over the communication network, which is described by graph theory.
Graph theory
The communication topology is described using a weighted graph, given by G = {V, E}. The vertices are given by V = {v1, v2, …, v
N
}, which denote the agents. The edges is denoted by the set E ⊆ V × V which represents the communication among the agents. The elements of weighted adjacency matrix
Communication noise
The communication noise perturbs the information shared among the agents. Therefore, the perturbed information is received by i
th
agent from its neighbours. We present an additive noise model which shows how the noise is added to information shared by the agents with their neighbours. The perturbed information received by i
th
agent from j
th
neighbour j ∈ N
i
can be given by
Switching topology
The agents are subjected to switching topology. The switching of the topologies is assumed to be random. We have generated many topologies, which are basically the adjacency matrices. These topologies are generated using Algorithm 1.
34
It can be mentioned that the number of topologies is not fixed and can be selected by the user.
Random topology generation x ← random number x ∈ (0, 1) A
k
(i, j) ← 1 A
k
(i, j) ← 0 A
k
(i, j) ← 0
Let us consider A
k
as the k
th
topology, k = 1, 2, …, N
p
, where N
p
is the number of topologies. It can be observed that N
p
adjacency matrices are generated, and they are square. The value of each element of these matrices is decided through a random variable x. If the value appears x > 0.5, the A
k
(i, j) = 1, otherwise A
k
(i, j) = 0. The reason for selecting the threshold value of 0.5 is to obtain 0 and 1 with equal probability, but the threshold can be changed. It can be mentioned that all the graphs may not consist of a spanning tree. Therefore, the DNDI is evaluated considering this issue. At each time instant, one of the N
p
topologies is selected randomly. The way to select the graph is given in Algorithm 2.
34
Selection of topology x ← random number x ∈ (0, 1) ind ← random_integer([1 N
p
], 1) A
S
← A
ind
A
S
remains same
Let us consider A S is the selected topology. The time instants are denoted by the variable i. Similar to Algorithm 1, the switching is decided according to the value assigned to a random variable x. The variable x is assigned a random value in the range between 0 and 1. If x is more than 0.5, a random integer ind in the range [1 N p ] is generated using the MATLAB function random_integer([1 N p ], 1). Then, A S is the topology corresponding to the integer ind, that is, A S = A ind . If the x ≤ 0.5, the topology does not change.
Actuator fault
The fault model for i
th
agent is discussed in equation (1)

It can be noted that the fault expression in equation (1) describes the fault free case if β
i
= 0 is selected.
Nonlinear dynamic inversion (NDI)
NDI is an efficient technique for designing a feedback controller for nonlinear systems. The mathematical details of NDI are given in this section. Let us consider a class of affine nonlinear dynamics as follows


The system is perfectly known and the matrix g(X) is invertible for all time. The NDI controller aims to produce the control U to make the output of the system, that is, Y to track a bounded and smooth reference signal Y* with time t. The tracking error is written as follows



g(X) is non-singular for all the time.
Lemma
The useful Lemmas are given here.
Let ψ1(t), ψ2(t) ∈ R
m
be continuous positive vector functions, by Cauchy inequality and Young’s inequality, there exists the following inequality
35
Let

In this paper, the objective is to design a consensus control for agents in MASs. There are N agents. In this paper, the dynamics of the agents are the same as equations (2) and (3). The dynamics for i
th
agent are given by



Distributed nonlinear dynamic inversion (DNDI) controller for consensus of MASs
The mathematical details of DNDI are presented in this section. In the case of consensus of agents, the reference states to i
th
agent in its neighbouring agents’ states. The error in states of i
th
agent (scalar agent dynamics) is given as follows













Convergence of DNDI in the presence of fault
According to the fault model the control expression is obtained as






Since λ2 > 0. Hence,
Differentiating equation (25) we get







Results
The simulation results are generated for different cases. • Case 1: Actuator fault only • Case 2: Actuator faults with switching topology and communication noise
Agent Dynamics considered for Simulation Study
The nonlinear dynamics considered for the i
th
agents is given by





Actuator fault only In this case, the effect of actuator fault is discussed alone. The faults are assumed to be random. They are generated using MATLAB function rand() ∈ (0, 1), that is,
Random fault in a few agents
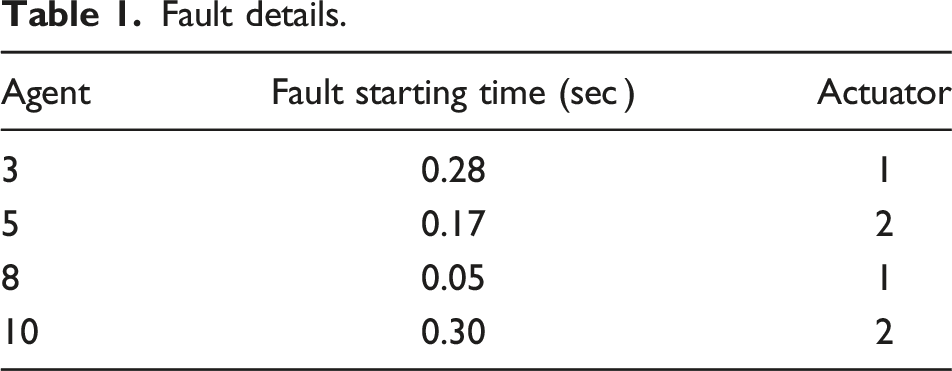
Fault details.
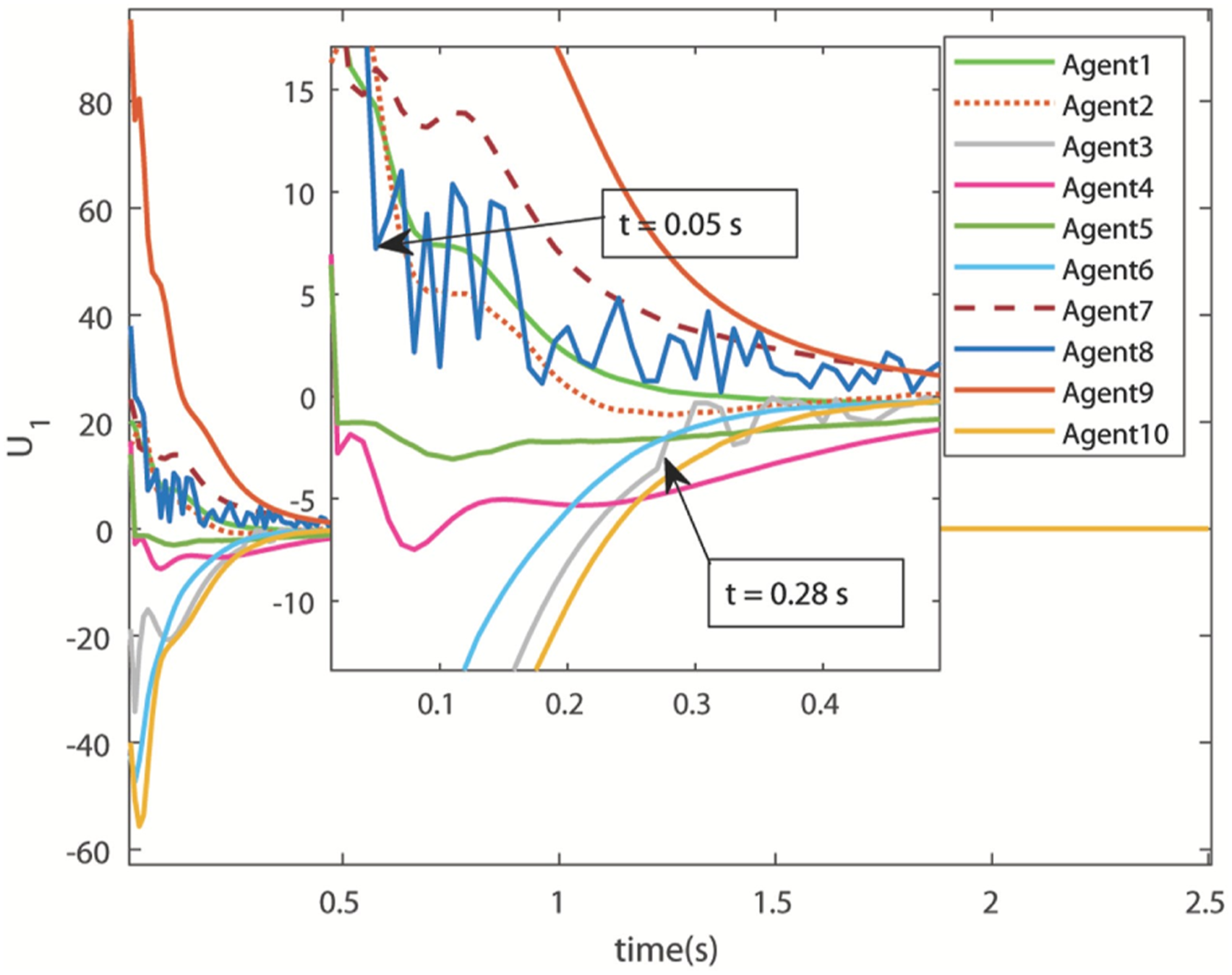
Control U1 (Case 1). Random fault in a few agents.
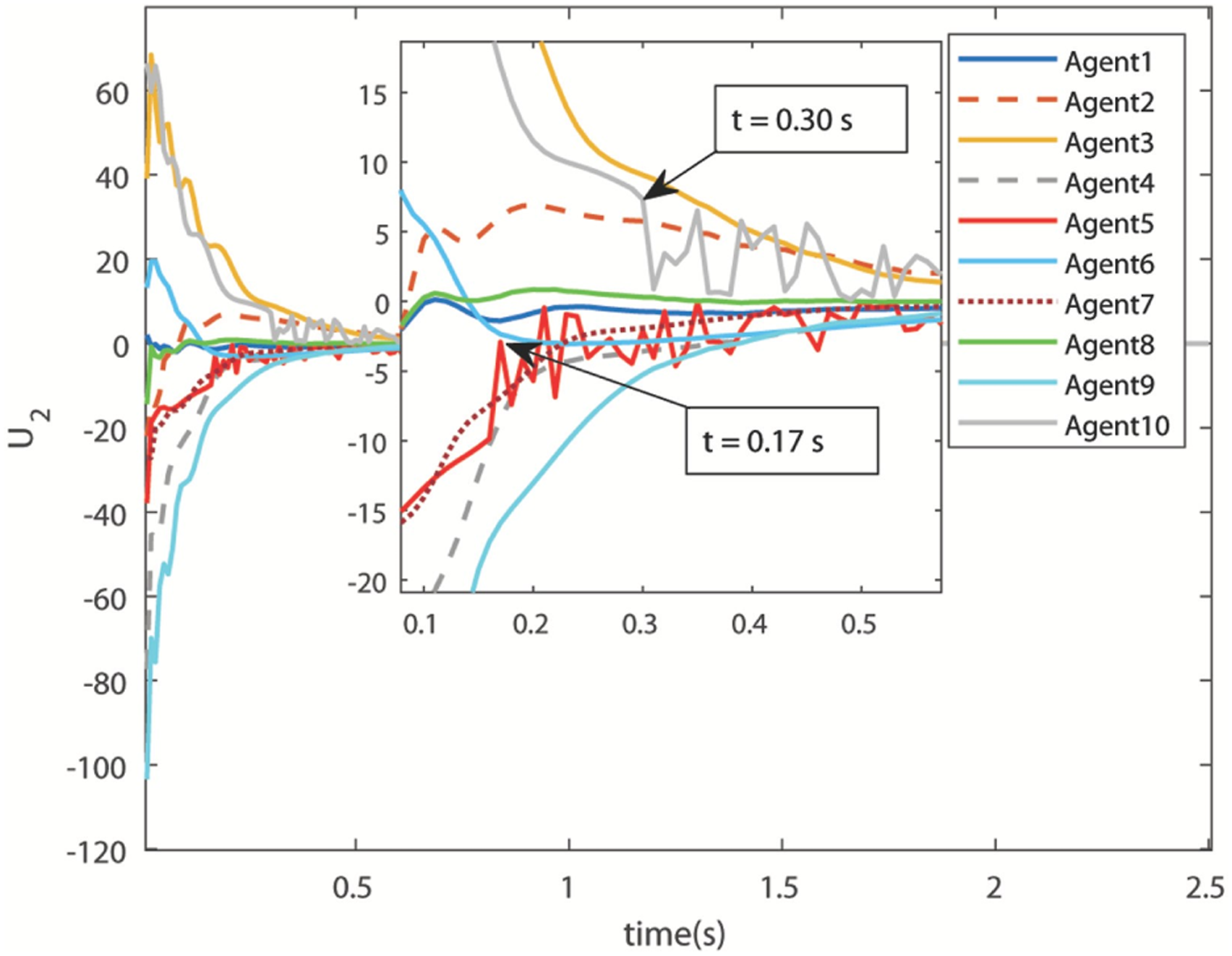
Control U2 (Case 1). Random fault in a few agents.
The response of actuator 1 for all agents is shown in Figure 1. The magnified view of the control U1 shows that faults in agents 3 and 8 started at t = 0.28 sec and t = 0.05 sec, respectively. They are pointed using black arrow.
The fault in actuator 2 for agents 5 and 10 started at t = 0.17 sec and t = 0.30 sec, respectively, which is visible in the magnified view in Figure 2.
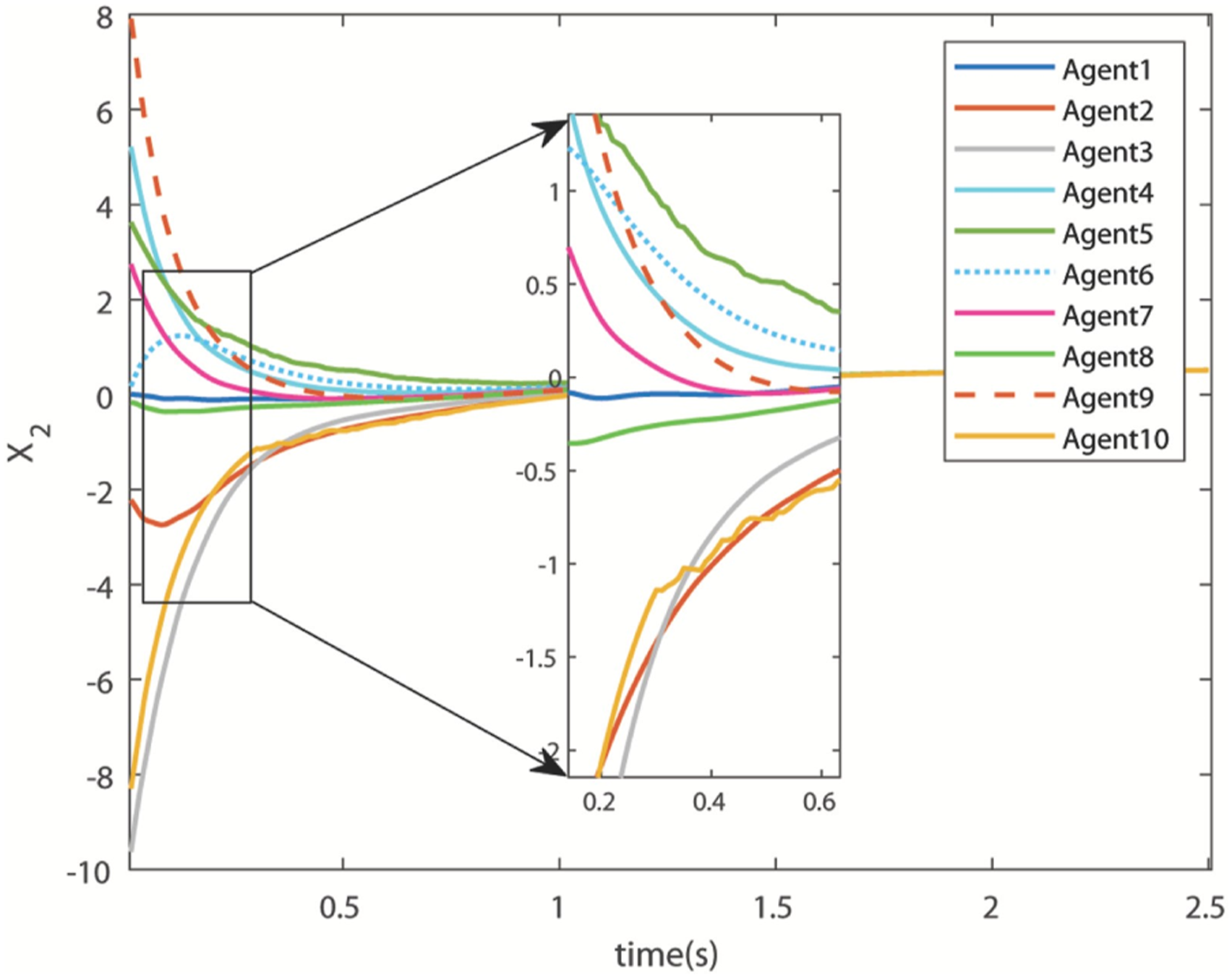
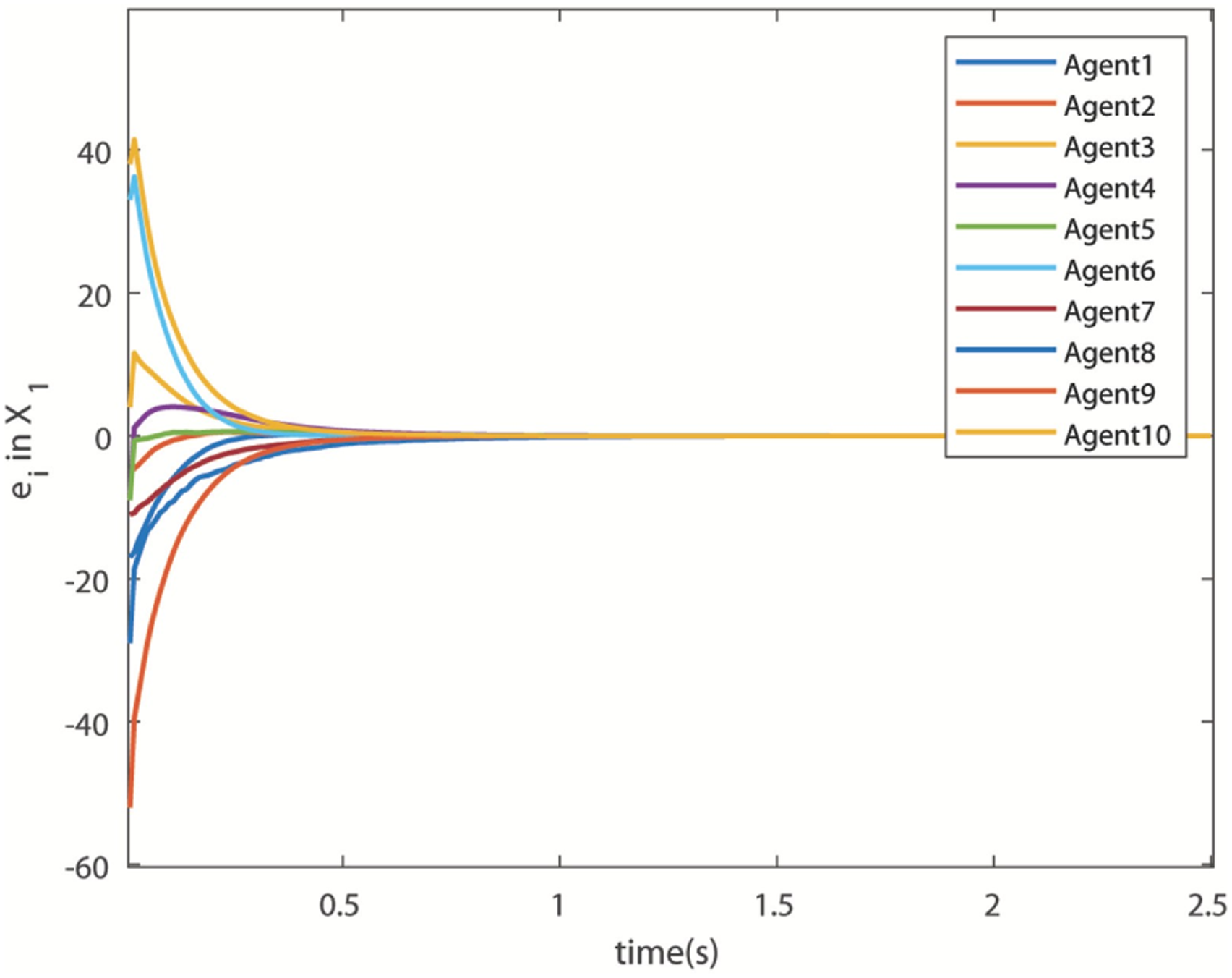
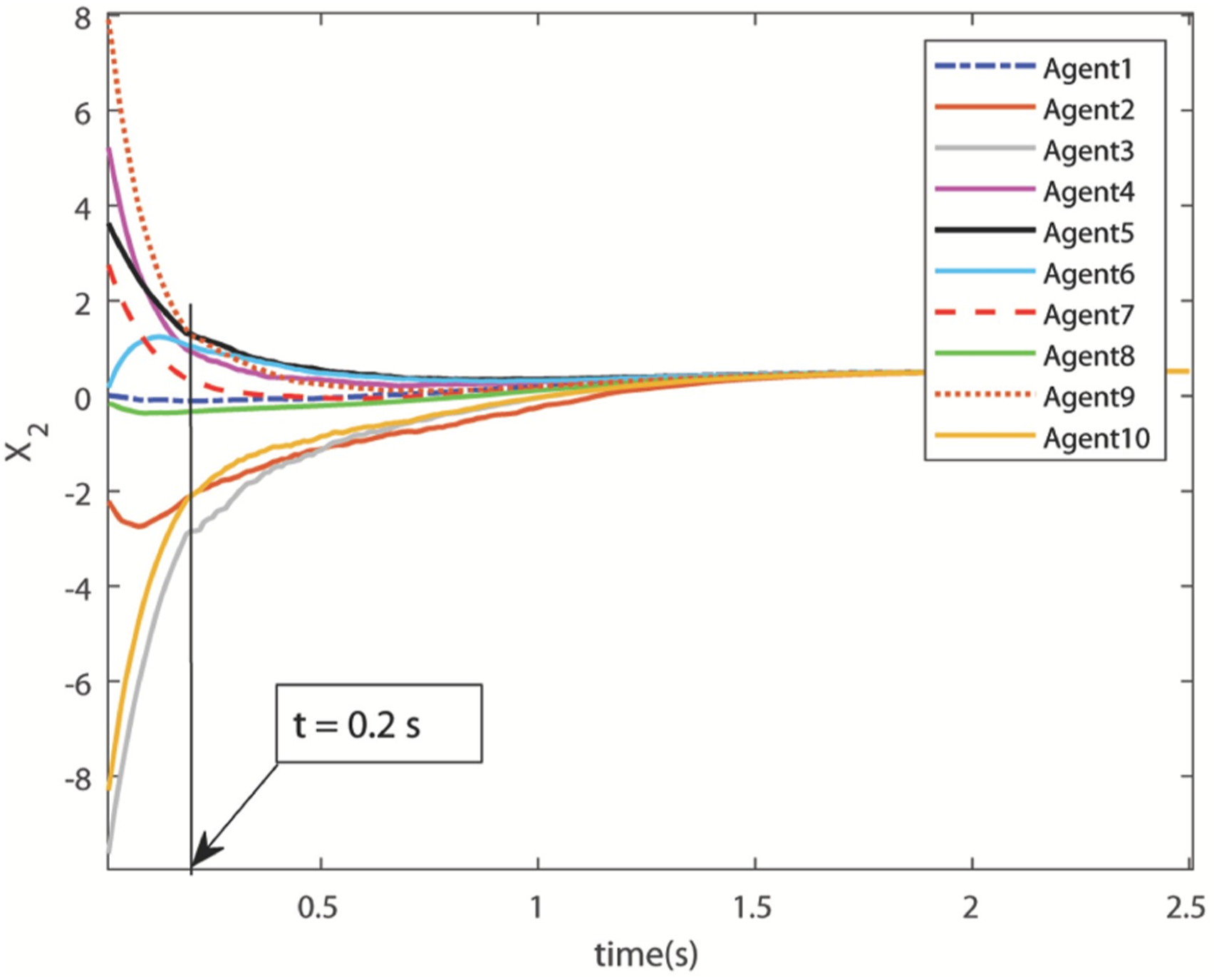
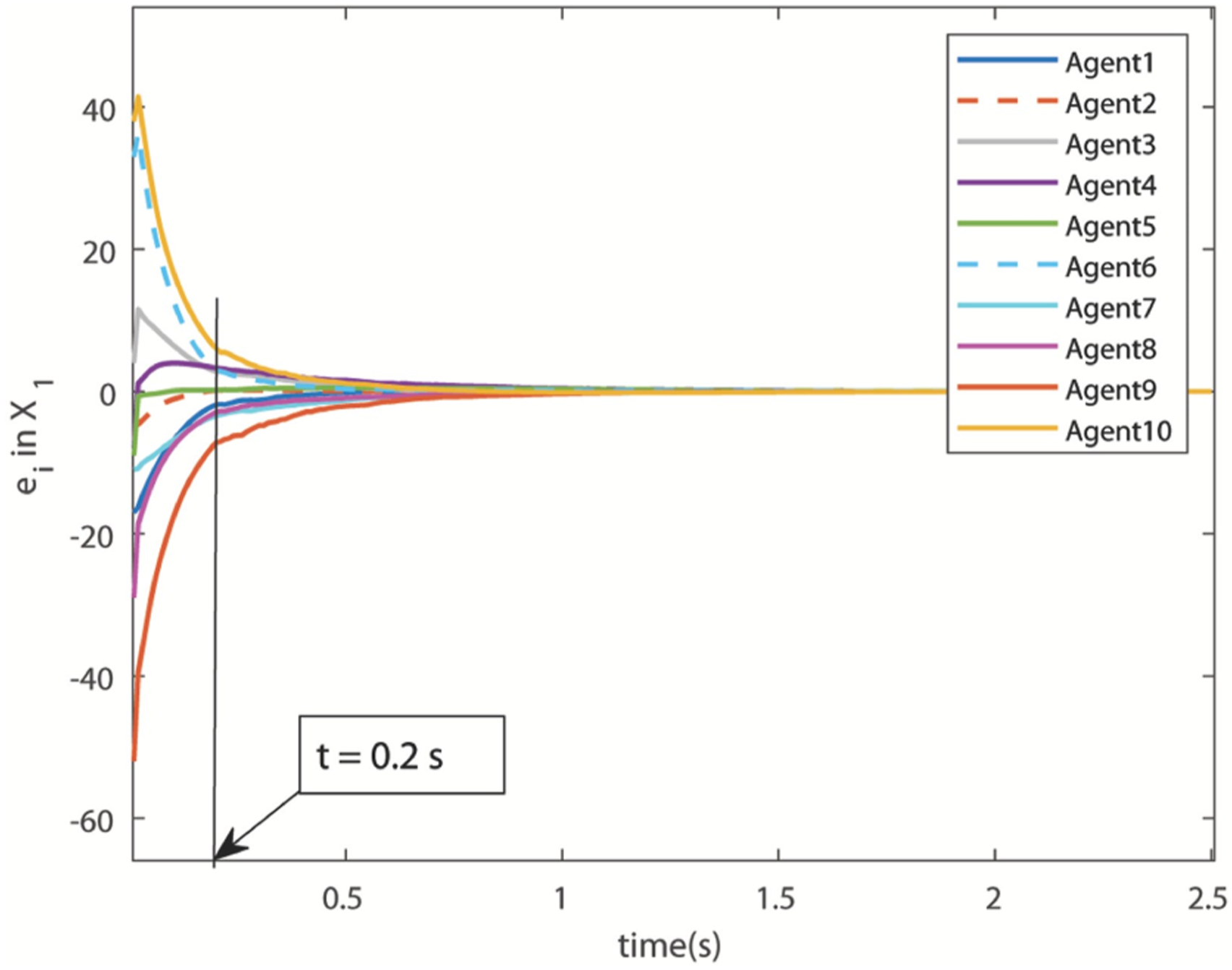
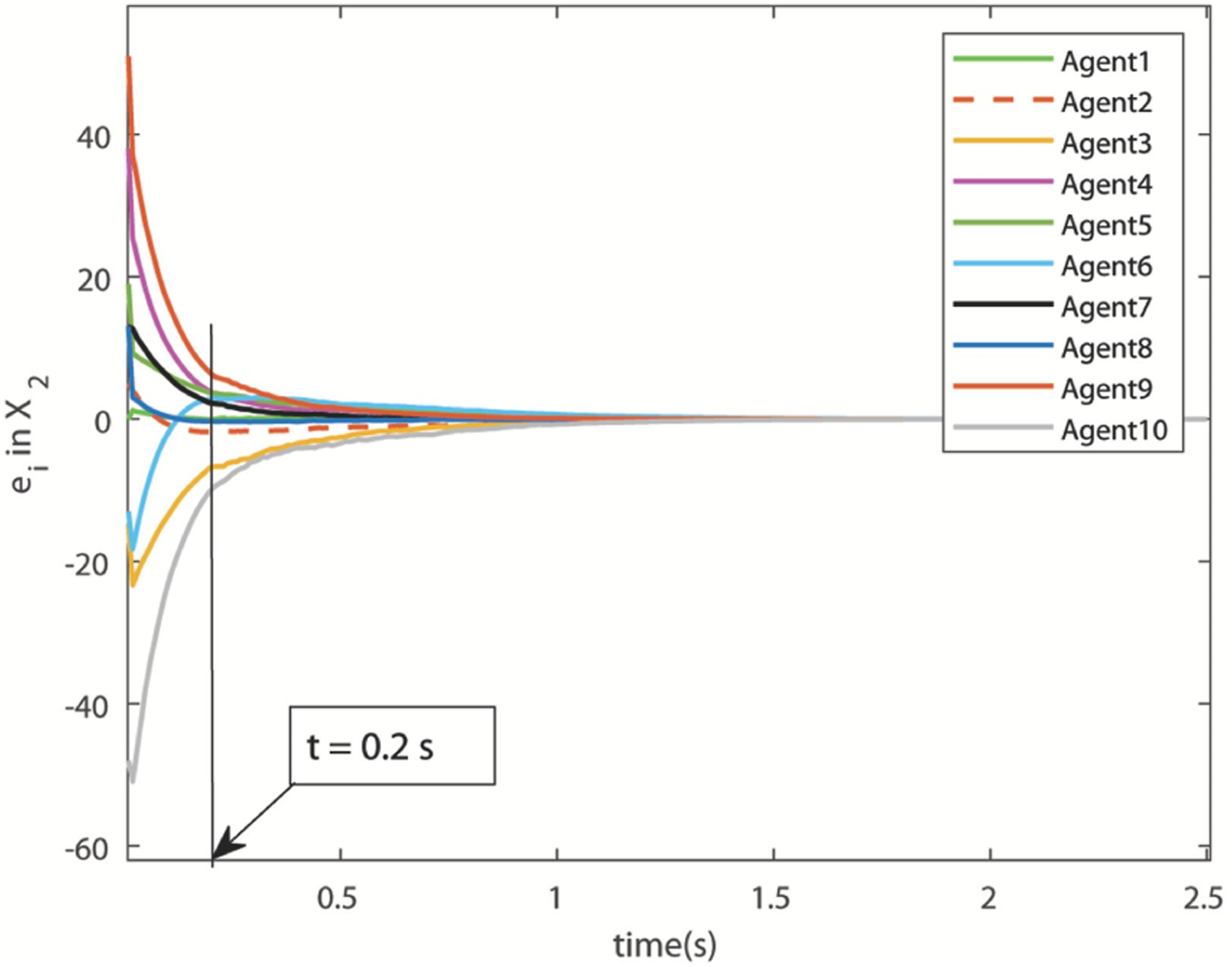
The state trajectories X1 and X2 of all the agents are shown in Figure 3 and Figure 4, respectively. The magnified views are provided in these figures. It can be observed that the X1 trajectory of agents 3 and 8 are affected by the actuator fault in U1. The X2 trajectory of agents 5 and 10 are affected by U2, which is visible in the magnified view of Figure 4. The consensus errors of the agents are shown in Figure 5 and Figure 6. It is clear that the DNDI controller successfully achieves consensus among the agents in the presence of actuator faults. Consensus of state X1 (Case 1). Random fault in a few agents. Consensus of state X2 (Case 1). Random fault in a few agents. Consensus error in state X1 (Case 1). Random faults in all agents. Consensus error in state X2 (Case 1). Random faults in all agents.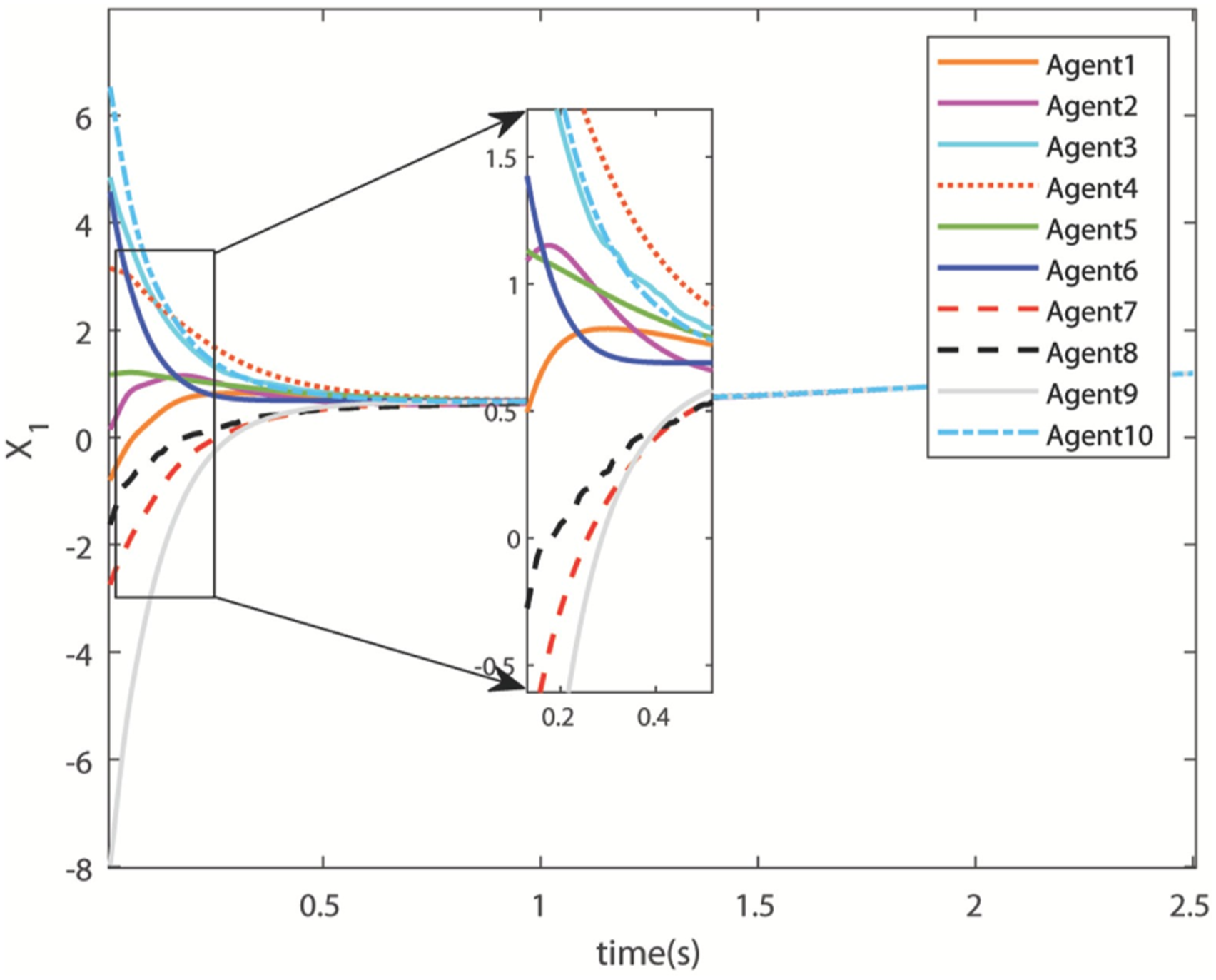
Random faults in all agents
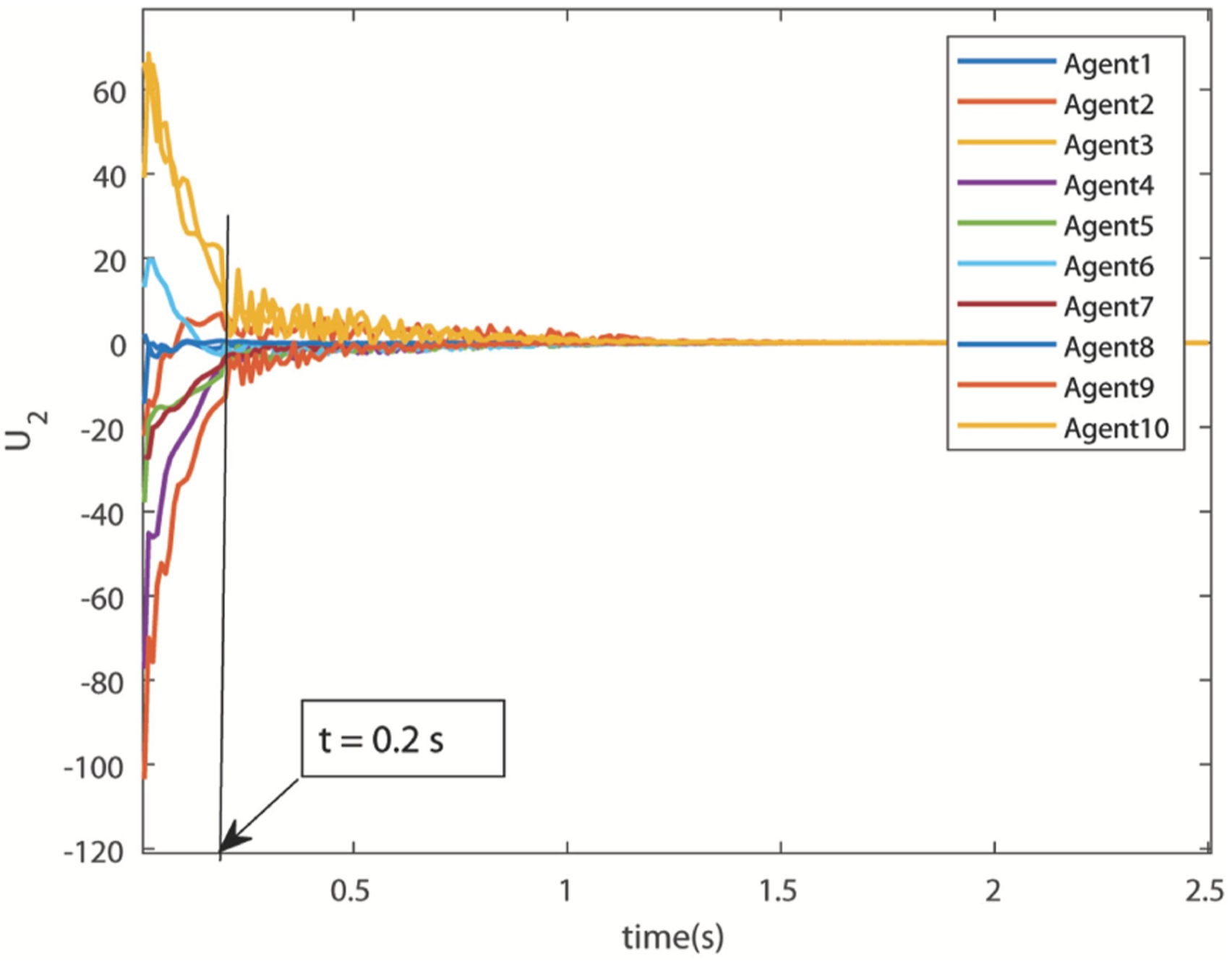
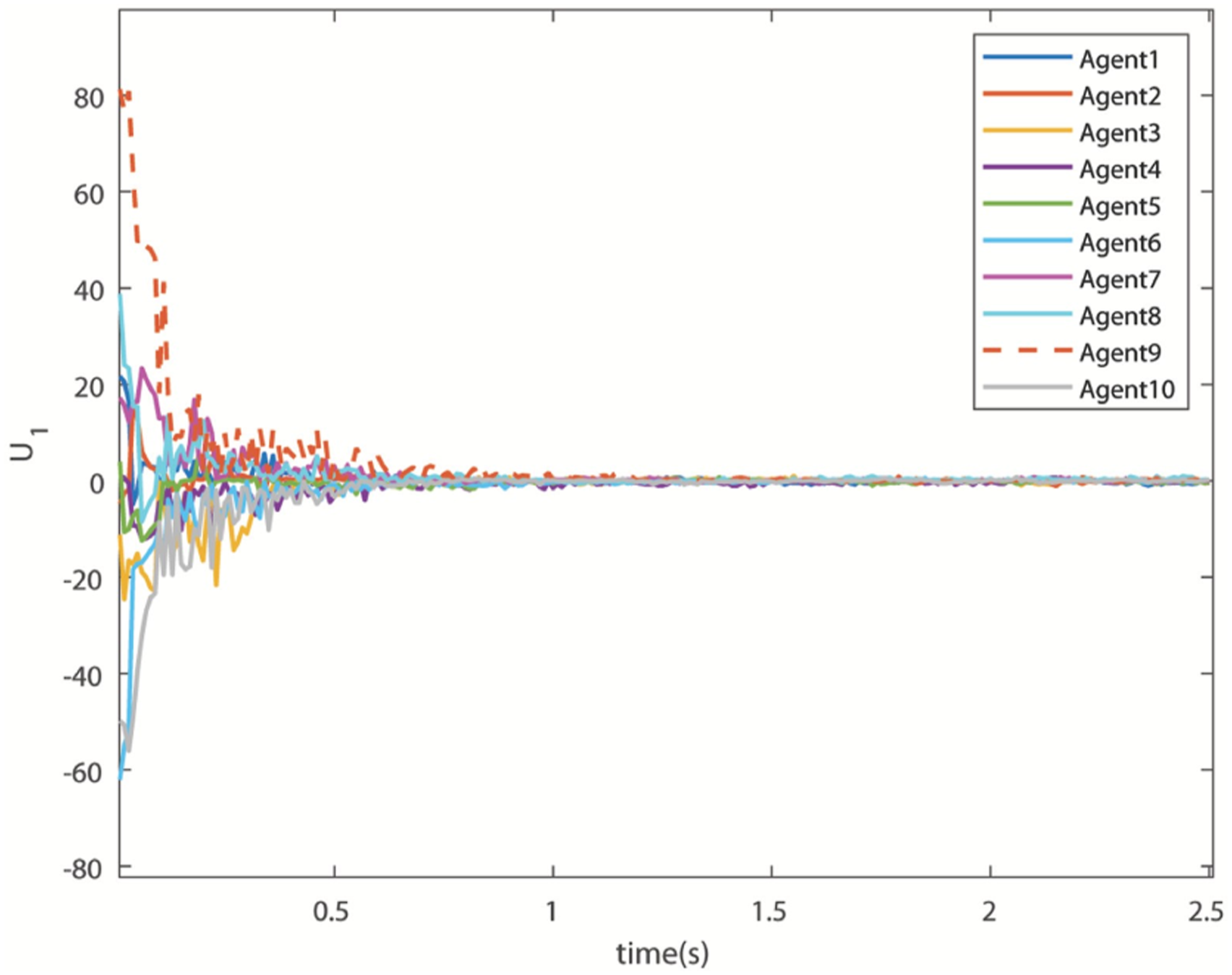
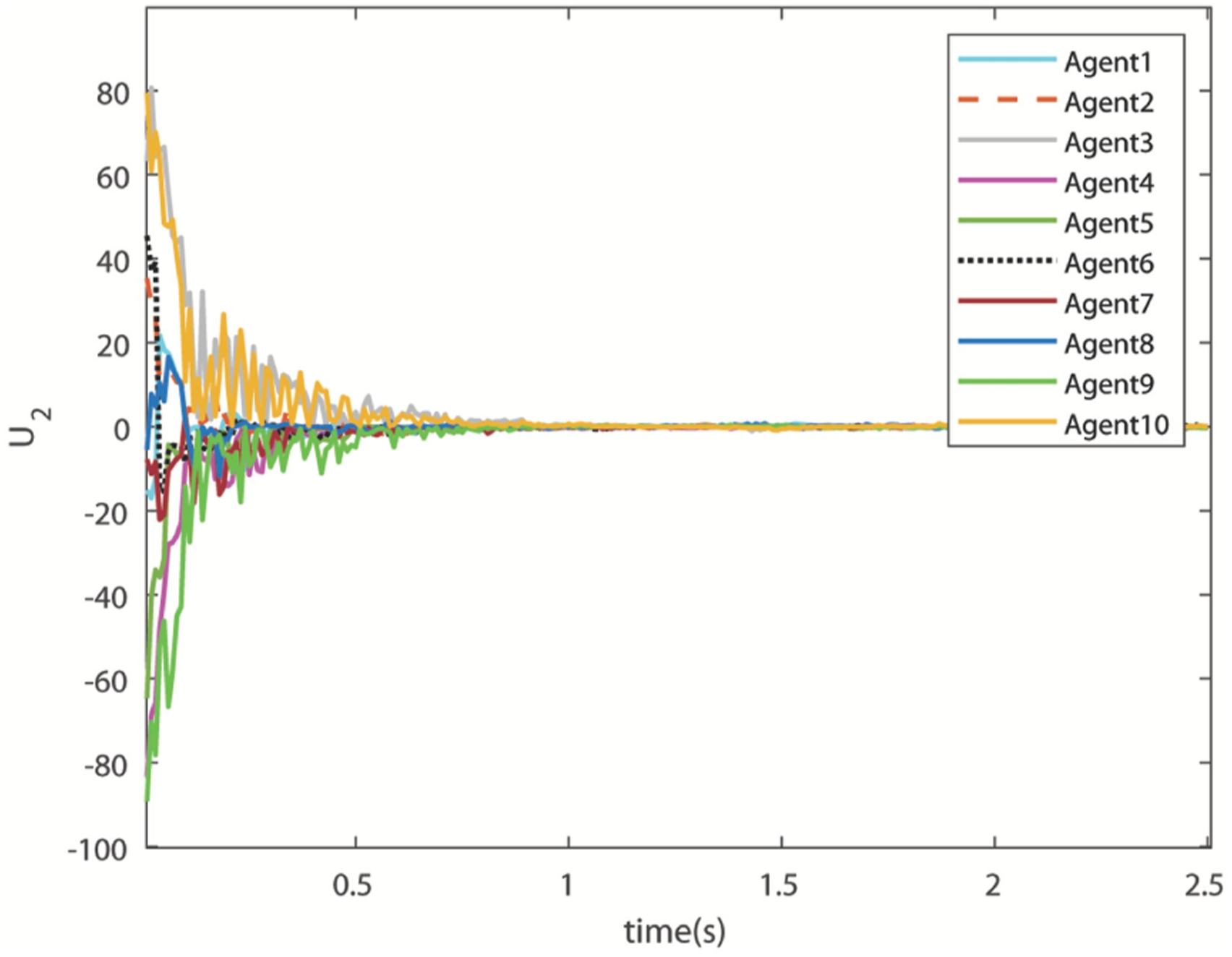
In this case, all the agents are having random faults for t ≥ 0.2 sec in both actuators. This situation somewhat describes a worst-case scenario in context of faults. The fault in actuator 1 and 2 started at t = 0.2 sec as shown in Figure 7 and Figure 8, respectively. Control U1 (Case 1). Random faults in all agents. Control U2 (Case 1). Random faults in all agents.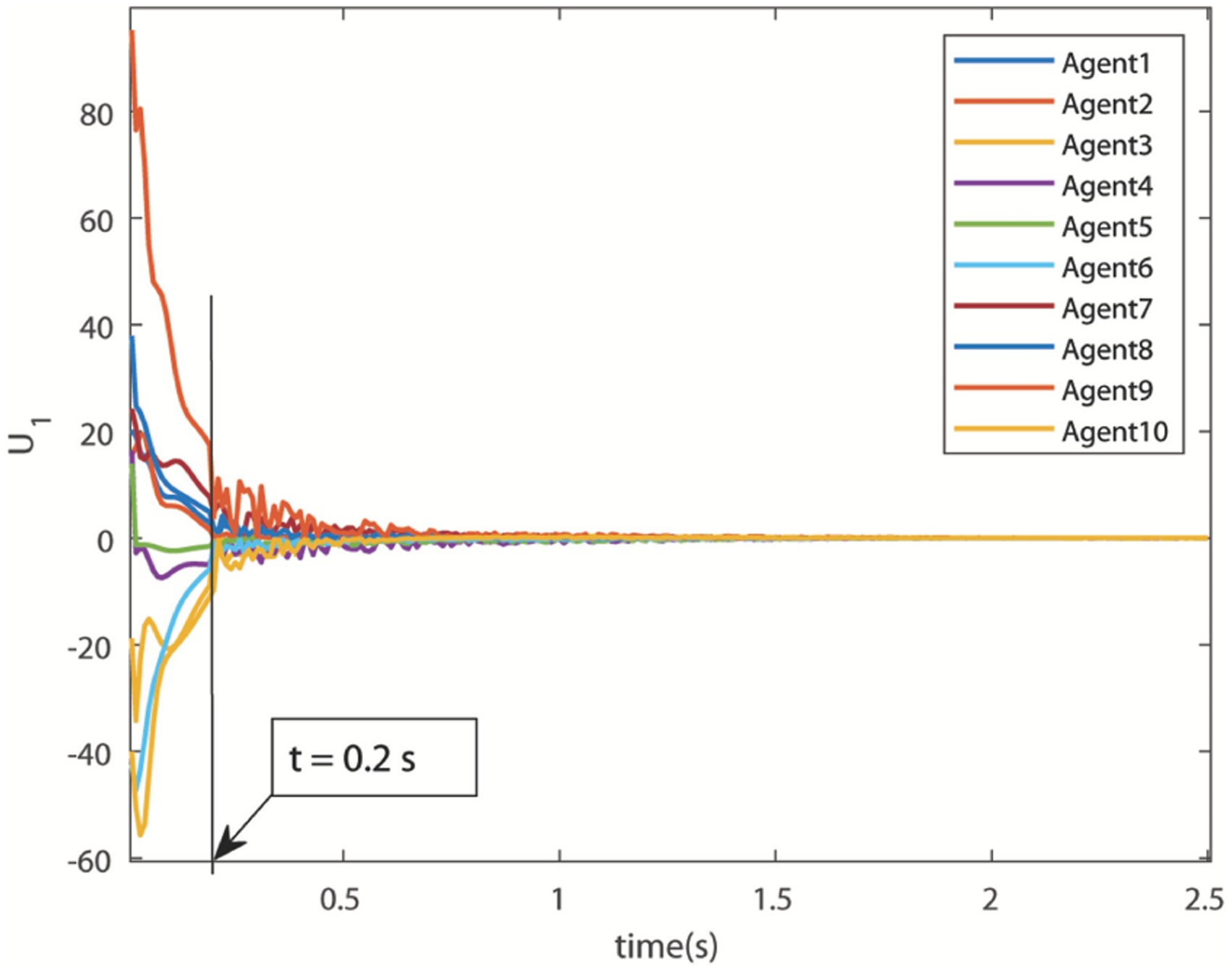
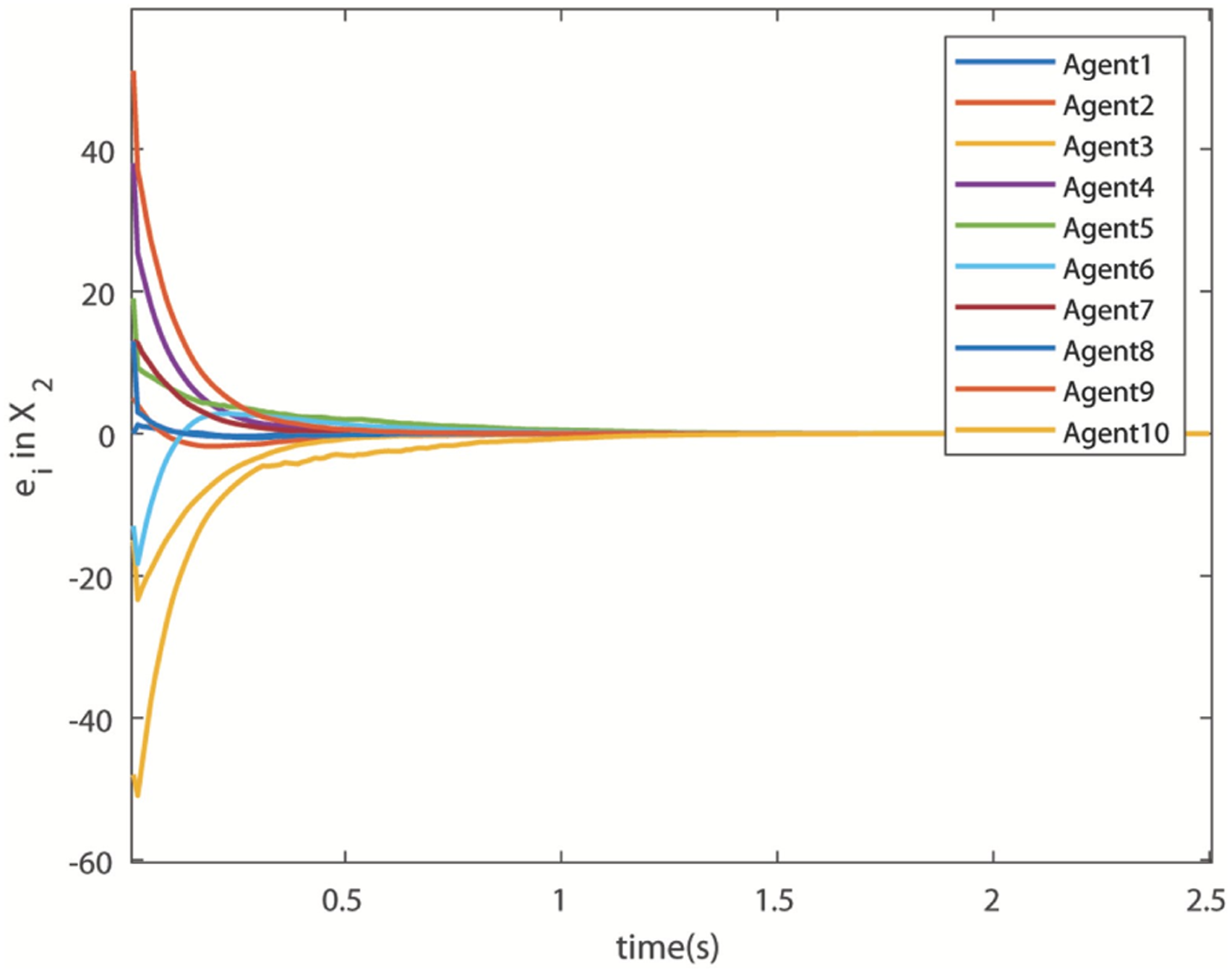
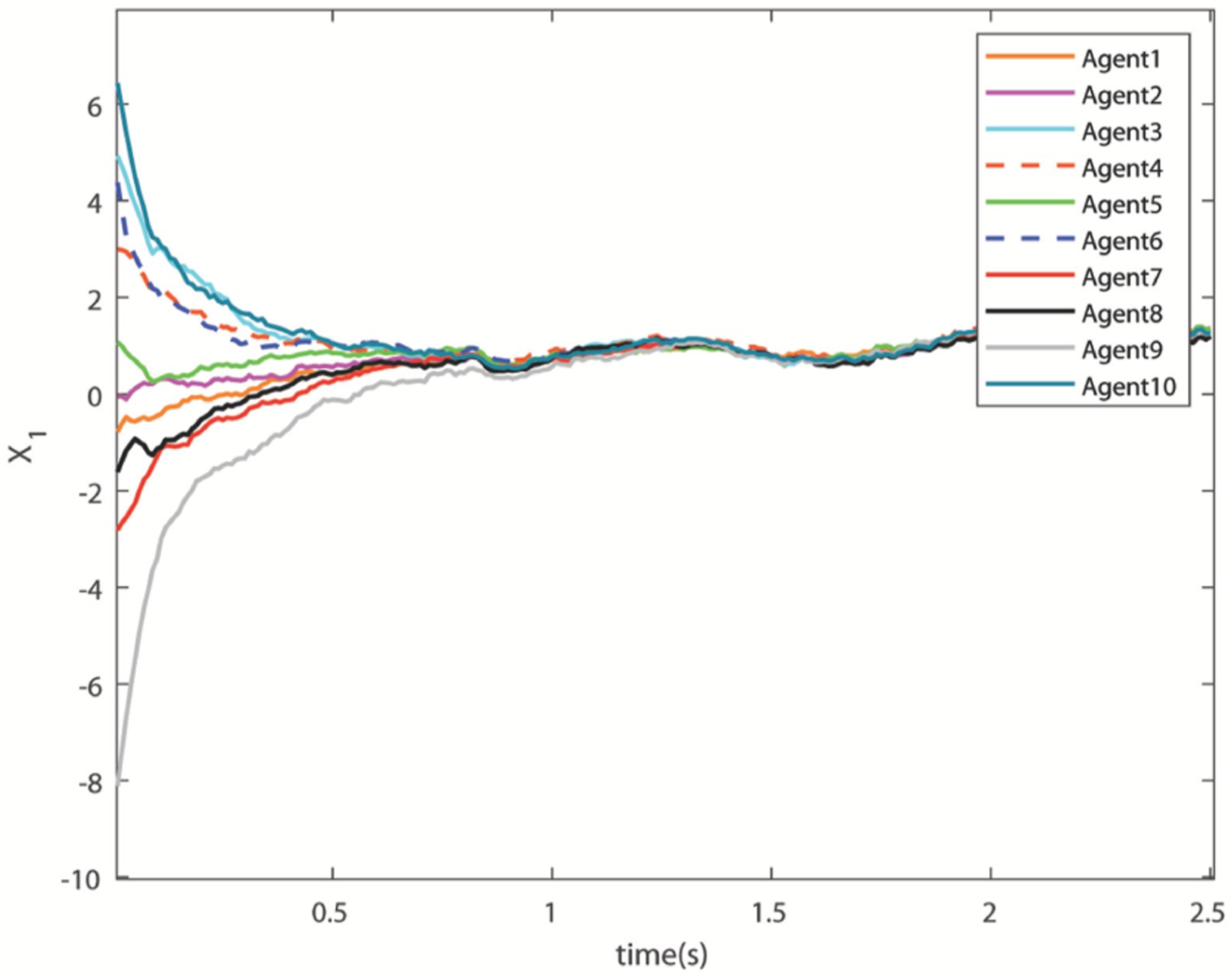
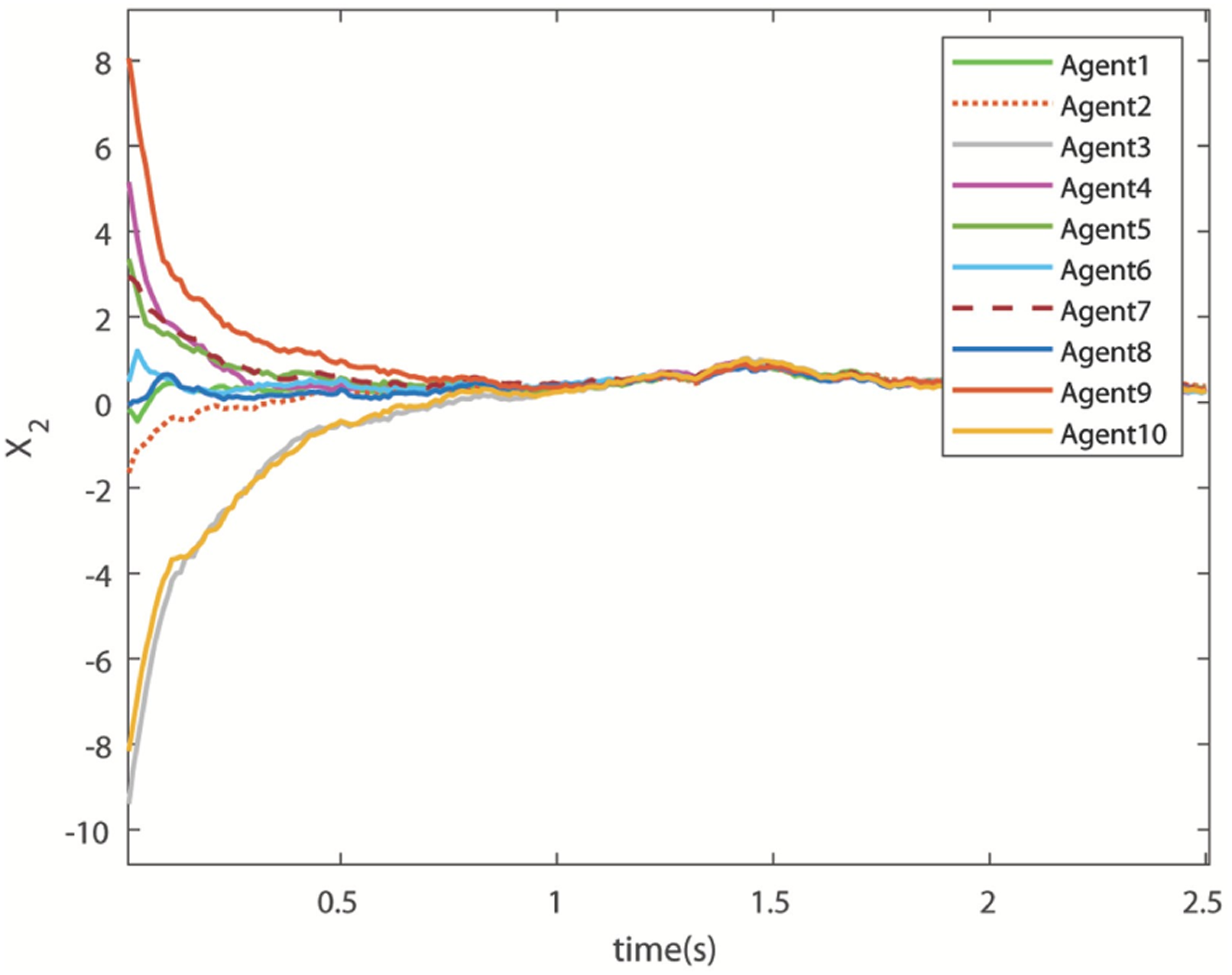
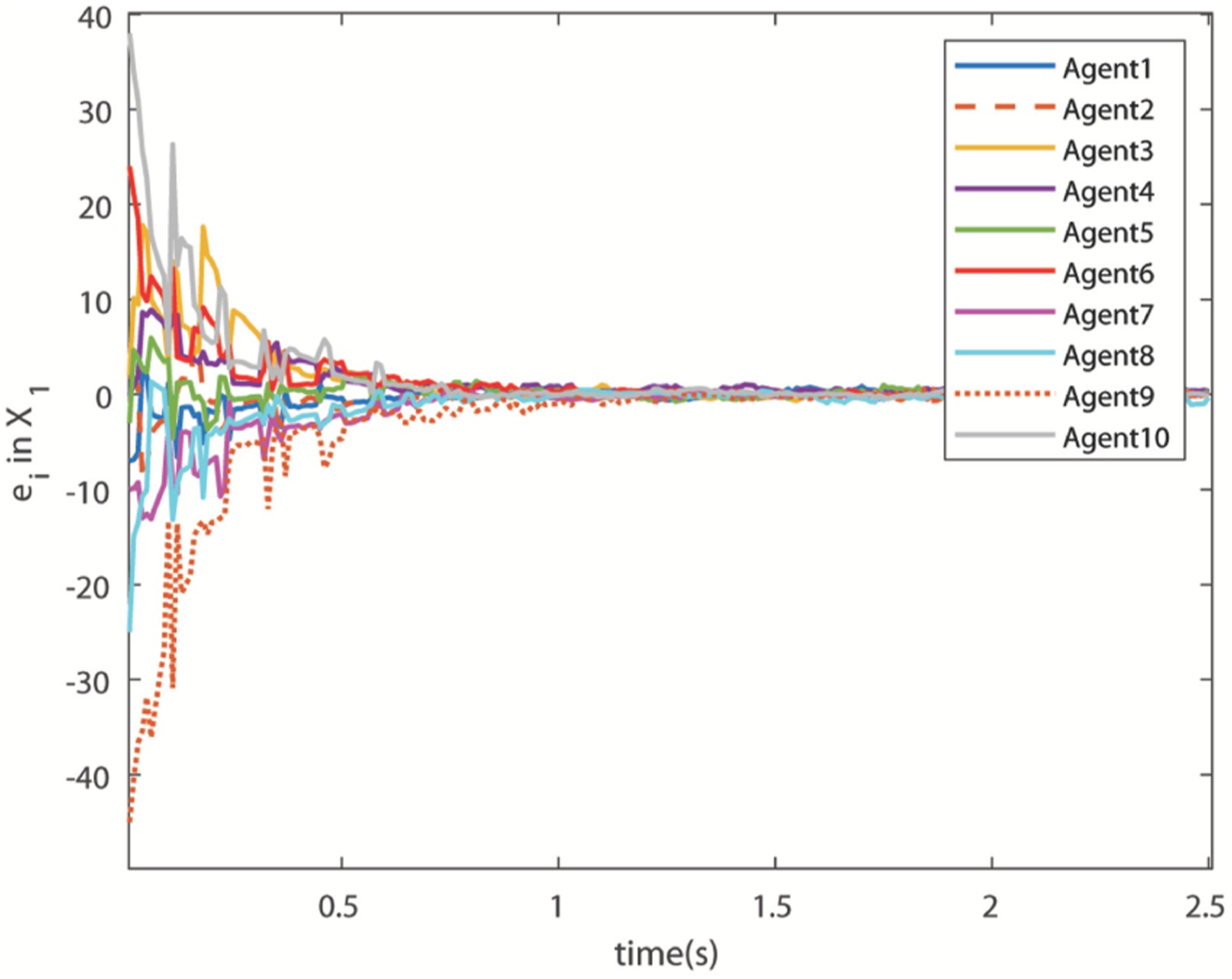
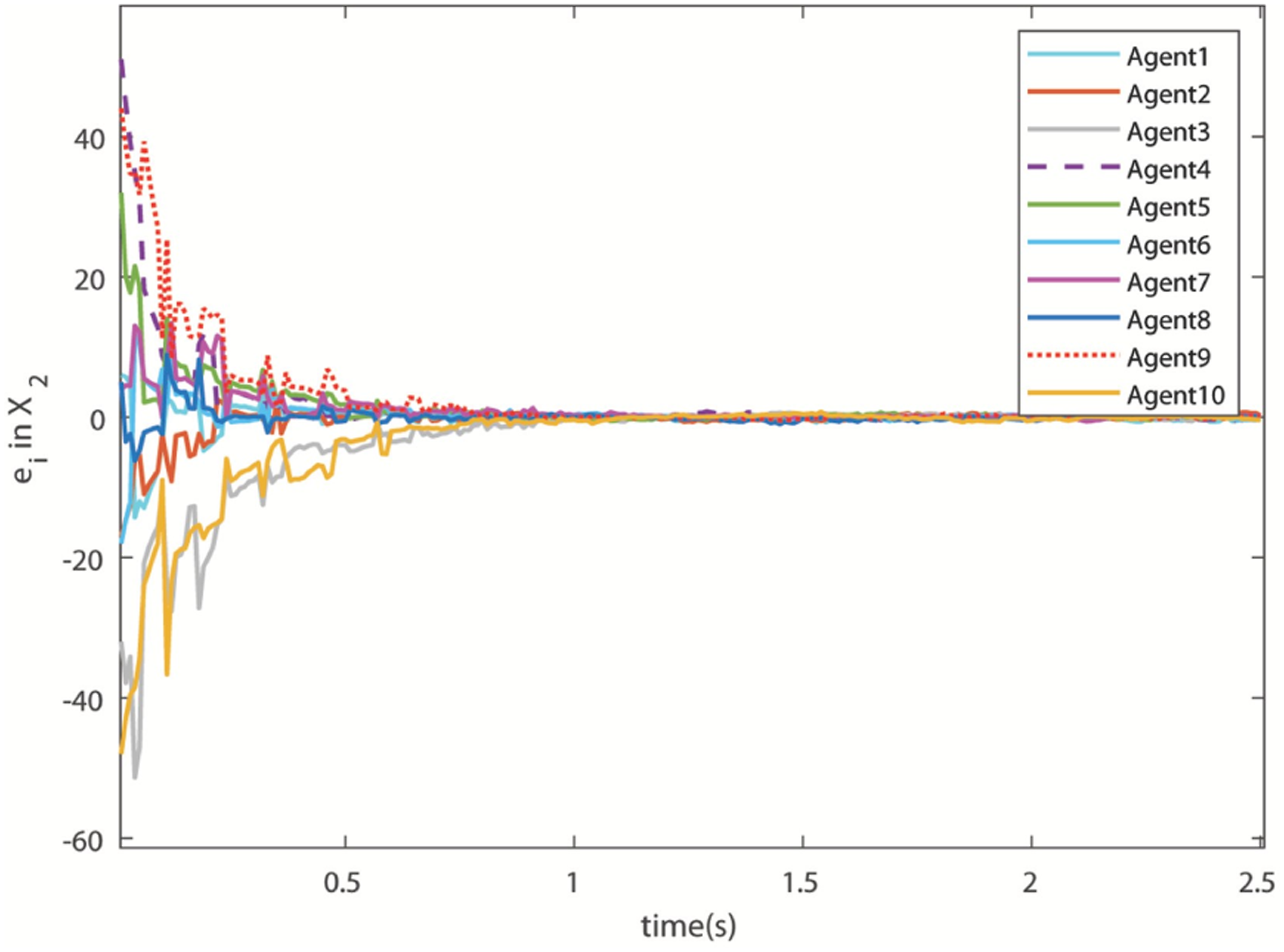
The consensus of states X1 and X2 are shown in Figure 9 and Figure 10, respectively. The effect of the faults is visible in state trajectories for t ≥ 0.2 sec. The consensus errors are shown in Figure 11 and Figure 12, which show that consensus is achieved using DNDI controller. Consensus of state X1 (Case 1). Random faults in all agents. Consensus of state X2 (Case 1). Random faults in all agents. Consensus error in state X1 (Case 1). Random faults in all agents. Consensus error in state X2 (Case 1). Random faults in all agents.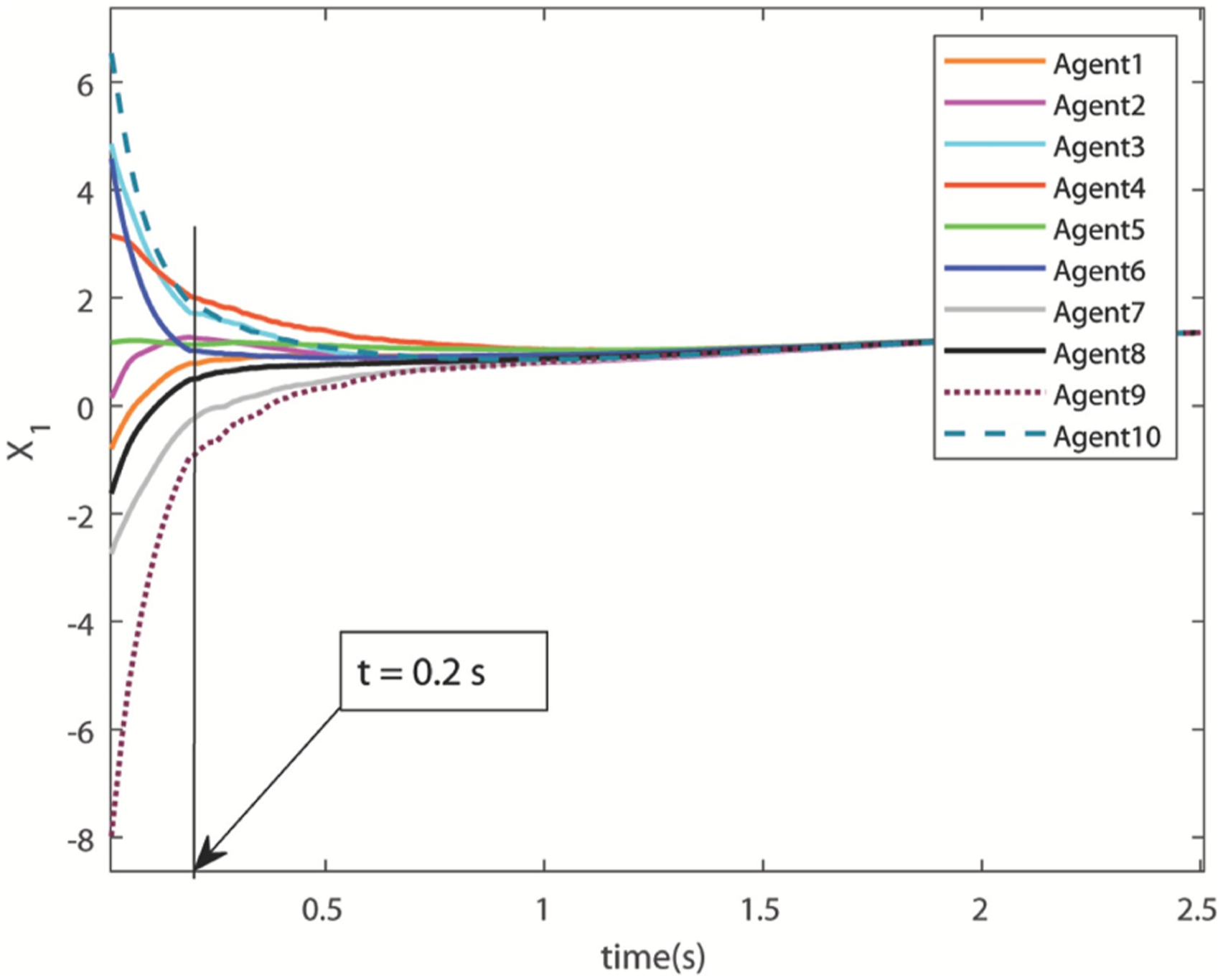
Actuator fault with switching topology and communication noise In this case, the communication noise and switching topology are considered along with the actuator fault. The random switching and noise are shown in Figure 13 and Figure 14, respectively. At each time instant, one topology is selected among 100 topologies using Algorithm 2. The control generated is shown in Figure 15 and Figure 16. It is clear that the switching topology and noise have an effect on control signals. The state trajectories generated by the control contain the effect of switching topology, communication noise and actuator faults. But the DNDI controller handled the issues, and the states converged in finite time. The convergence of the states can be verified by the bounded consensus errors shown in Figure 19 and Figure 20. The simulation results presented here are realistic, and it can be seen that the NDI-based controller or DNDI is successful in achieving the consensus among the agents in the presence of switching topology, communication noise and actuator faults.
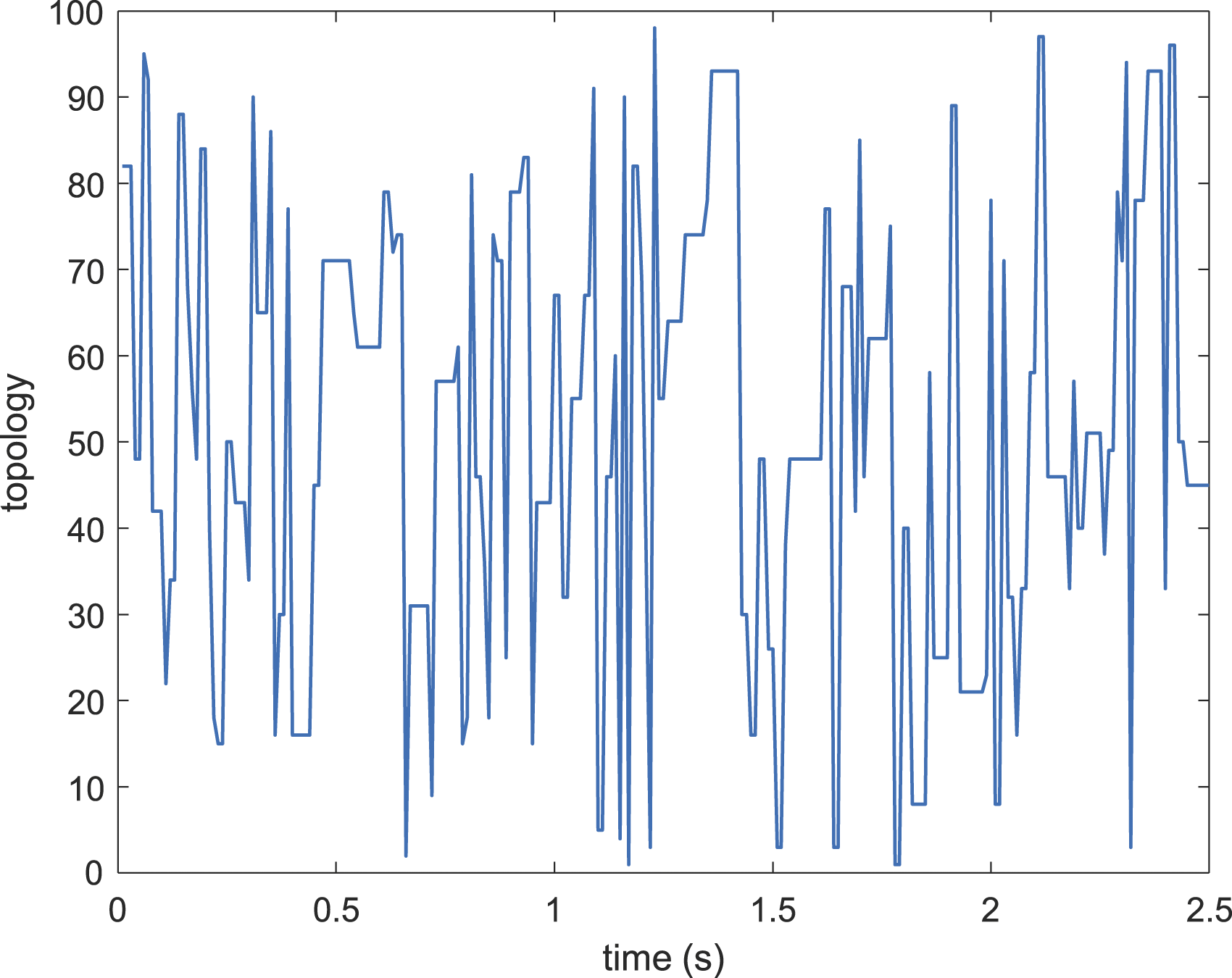
Random switching of the topologies (Case 2).
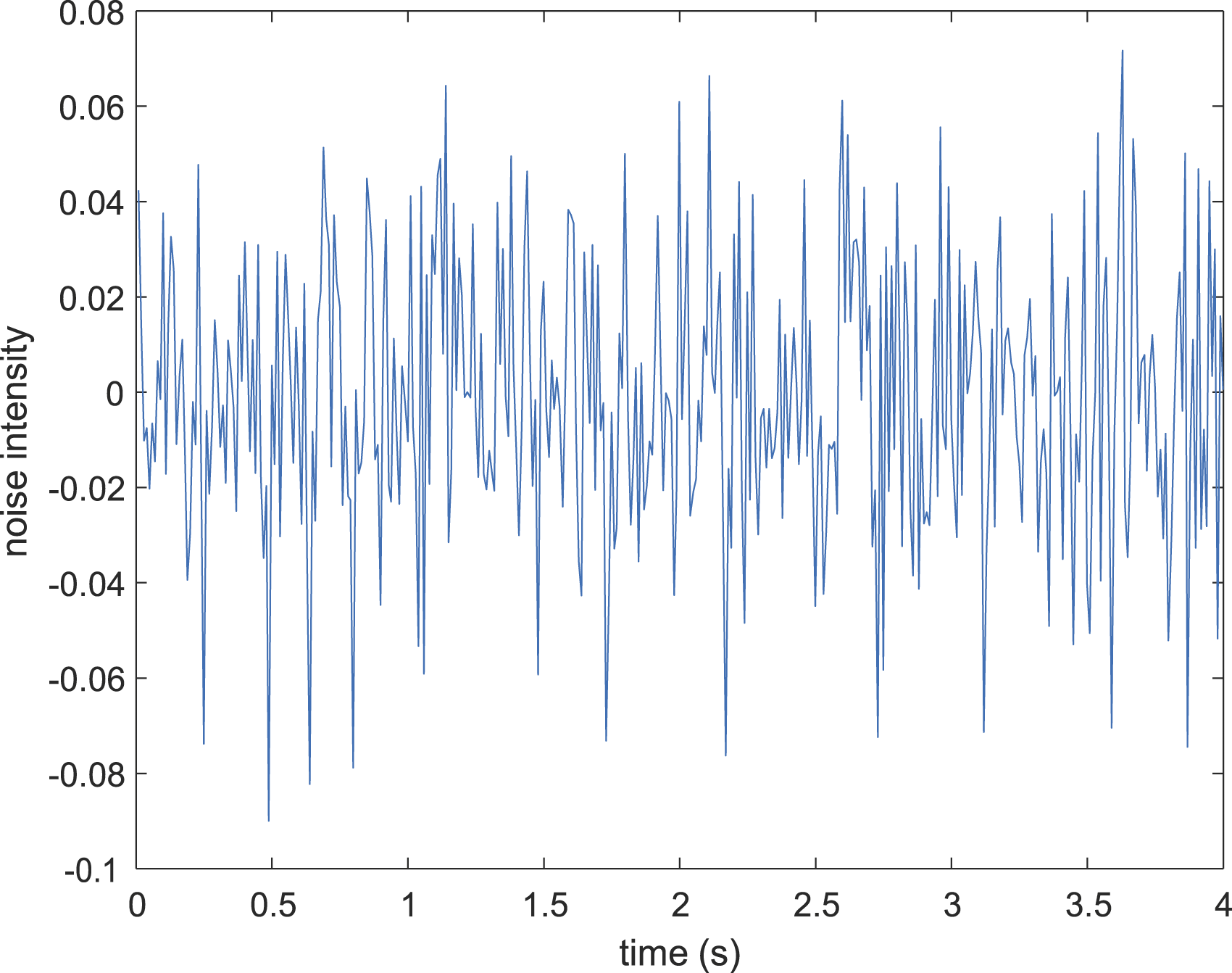
Communication noise (Case 2).
Control U1 (Case 2).
Consensus of state X1 (Case 2).
Consensus of state X2 (Case 2).
Consensus error in state X1 (Case 2).
Consensus error in state X2 (Case 2).
Conclusion
The consensus protocol DNDI successfully handles issues like switching topologies, noise and actuator fault simultaneously. Moreover, the switching among various topologies is considered to be random, which is realistic. The actuator fault is also random in nature, which happens in real-world scenarios. For all the cases, DNDI maintained the stability of the MASs and achieved consensus among the agents efficiently. The mathematical proof of boundedness gives the theoretical base. Therefore, DNDI is a potential candidate for the fault-tolerant consensus protocol design.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partially funded by an Engineering and Physical Sciences Research Council (EPSRC) project CASCADE (EP/R009953/1).