
Abstract
The difficulty of finger robot grasping control designs is the inevitable coupling in the dynamics of finger joints and finger tips because this dynamics coupling effect lets the overall motion of the finger robots to be constrained by the object states when they are controlled to manipulate an object’s postures. Besides, from the practical implementation point of view, a stable and easy-to-implement control structure is also an important task for this topic. For solving these two design issues, an optimal hybrid control design which combines feedback linearization and nonlinear H2 control concepts for grasping design of three-joint dual finger robots is investigated in this study. This investigation makes two main contributions to the finger robot grasping control design: (1) an effective and acceptable control performance for finger robot grasping control designs under the effect of dynamics coupling is delivered and (2) a really simple nonlinear optimal control scheme is obtained.
Introduction
In the past decades, technological advances and the emergence of the digital era have led to the ubiquitous use of robots in daily life, and robots with most of them requiring a high-quality motion mechanism and a well-designed controller are demanded in various industrial and service fields such as industrial robots, humanoid robots, and wheel-type mobile robots. 1 –3 One of these robots: the finger robot has attracted a lot of attention of researchers recently because the fundamental functionalities, such as grasping and manipulation, for various objects by finger robots are often required in a variety of environments. In a grasping design, both the end-effector position and the interacting forces between the grasped objects and the controlled finger robots should be stably and precisely controlled. However, the natural system coupling between robot fingers and objects raises the barrier of control designs. This means multitracking errors should be controlled to converge to zero simultaneously under the system coupling effect in a successful task. Therefore, the grasping task for finger robots becomes one of the complicated functions and challenging missions because the controlled finger robots must possess the capabilities to overcome this system coupling effect and achieves satisfactory control performance in the working area. Besides, finger robots have been expected to elegantly mimic the operations of human hands; hence, well-developed finger robots must have the capability of dexterous and elaborate manipulations in real time. For achieving this control issue, a controller with an easy implementation structure is always required for real-time grasping manipulations of autonomous finger robots. From the above-mentioned reasons, it is easily to find out that how to effectively develop a control design for finger robots stably regulating objects in real time is still an open challenging question in robotics because this is a very difficult mission for researchers to develop such a control design which simultaneously possesses (1) simple and easy implementation control structure and (2) quick error convergence and (3) optimal control performance guaranteed design under the effect of system coupling.
From the development history of the finger robots, a lot of different types of open-loop control designs are announced for four or five fingers with two or three joints. 4,5 In these kinds of designs, the relationship between robot fingers and the grasped object were never considered because there are no sensing messages can be feedback to the control loop to derive robot fingers to desired postures with suitable normal and tangential forces. Published results 6,7 introduced some design concepts via using sensory motors for overcoming the drawback of the above-mentioned open-loop control designs. These results provide the possibility to construct a controller with the kinematics constraints of robot fingers and the grasped object; however, some strong assumptions are needed for these achievements. By the survey of the existing literatures, three main categories in control designs of finger robots can be classified as: (1) model-based control, 8 –13 (2) adaptive controller 14 –16 and (3) neural network and fuzzy control designs. 17 –20 From practical implementation point of view, control methods of categories 1, 2 and 3 are too complex in the structures of controllers and can’t be easily implemented via using low-cost microchips for real-time applications due to their high computational consumptions. For solving the computational burden and the system coupling effect of the finger robot control design, an advanced nonlinear hybrid control design that is with an easy-to-implement structure and can properly mitigate the dynamics coupling effect is proposed based on feedback linearization control concept (for object regulation purpose) and H 2 control concept (for joint manipulation purpose). To meet the requirements of easy implementation and low-cost spending in computation and hardware, one nonlinear closed-form solution which possesses the simplest control structure is derived mathematically for the joint manipulation of finger robots. This is also one of the main contributions of this investigation. Generally, the closed-form solution of the nonlinear H2 control design needs to solve the corresponding nonlinear time-varying Riccati-like equations, which cannot be easily solved except for very simple cases. Fortunately, a closed-form solution can be obtained for this investigation by the adequate choice of state variable transformation and detailed analysis of tracking error dynamics. Besides, by selecting suitable control gains for the proposed hybrid controller, the dynamics coupling effect can be asymptotically decoupled, and tracking errors of the overall finger-object system will converge to zero quickly. In the following sections, mathematical model between the robot fingers and the grasped object and hybrid control design of this proposed method will be derived in detail first. Discussions of the simulation results which reveal the satisfactory control performance of this proposed method are also indicated then.
Mathematical models of fingers-object system
A three-joint dual finger robot, which grasps a rectangular object, is shown in Figure 1.

Geometrical relations of the three-joint dual finger robot grasps an object.
The overall dynamic equations of the fingers-object system can be described as follows


Equation (1) is the dynamics between the fingertip and the object, and equation (2) is the governing equation for finger joints. In equation (1), Θ = [x, y, θ] is the position and inclined angle of the object, Io is the inertia matrix of object in which M and I stand for the mass and inertia moment of the object, go is the gravity vector and F is the contact force vector which contains the tangential forces and the normal contact forces between the fingertip and the object.
The regulation messages,Yi, for i = 1, 2, which describes the vertical distance between contact points and mass centre of the object, can be formulated as follows

where Yi(0) expresses the value of Yi, when
Nonlinear optimal grasping control design
In this section, the mathematical derivation of the proposed method will be introduced in detail. The control objective is to develop a hybrid nonlinear control law which guarantees the global stability and satisfies an H 2 performance index simultaneously to optimally manipulate an object for a controlled dual finger robot. According to the block diagram of this hybrid control system illustrated in Figure 2, it is easy to find out that this proposed method includes two control loops: (1) the object regulation loop and (2) the finger joint manipulating loop to deal with coupling character of the finger-object dynamics in equations (1) and (2). The first loop is used for the purpose of grasping and regulating an object. That is, the first control loop of this proposed method must be able to regulate the position and inclined angle Θ of the object to the desired posture Θd by F in equation (1), which expresses actual forces exerted on the object. For achieving design targets of global stability, perfect regulation, and offering enough grasping forces to regulate the object, the famous feedback linearization method will applied in this control loop.
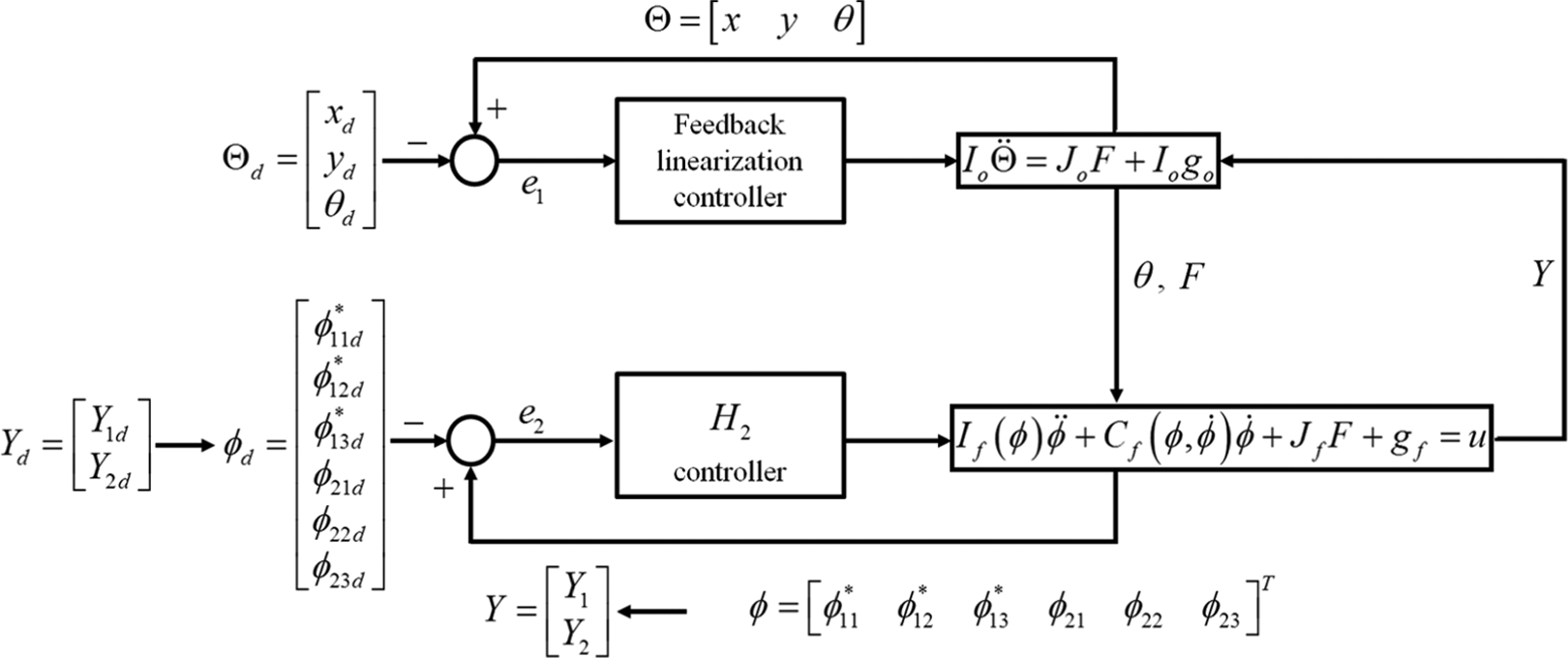
Diagram of overall fingers-object dynamic system with control commands F for the object regulation loop and u for the finger joint manipulating loop.
As to finger joint manipulating loop, it is a posture tracking loop for the finger joints. The developed controller u should have the ability to converge the postures of the finger joints φ to the designed postures φd which are transferred from the desired contact points Y1d and Y2d. The H 2 control law which possesses the optimizing control performance will be applied to this finger joint manipulating loop. Finally, the fingers-object system can be controlled simultaneously by combining these two control loops. The individual description of these two control loops will be introduced as below.
Object regulation loop
Feedback linearization control approach
To grasp an object securely, the desired normal contact forces of F should be exerted continuously, and the contact forces F between finger tips and object surface aim to track the centre of the object to the desired position Θd = [xd, yd, θd] of the object.
Suppose the contact forces F contain deviation forces ΔF which might accelerate and decelerate the object and desired contact forces Fd that can be set up by designers in prior and are used against the forces of gravity in object. Then the dynamic equation of the object controlled by the deviation forces ΔF and the desired contact forces Fd can be written as follows

Equation (4) can be further expressed as a second-order differential equation with the invertible Io as follows

This equation devotes the relation between control input F = ΔF + Fd and output Θ.
Define the regulation errors of the object as follows

In order to enclose control message in regulation errors, a double differentiation is taken for equation (6) as follows

Substituting equation (5) into (7), we can obtain as follows

According to the feedback linearization method, a feedback linearization-based control force F can be chosen as follows

with the deviation forces ΔF and desired contact forces Fd being expressed as follows


where (Io−1 Jo)+ is the pseudo inverse of (Io−1 Jo).
Substituting equation (9) into (8), a second-order error characteristic equation can be found as follows

where K1 and K2 are control parameter matrices with adjustable coefficients ki for i = 1,⋯,6.
By selecting coefficients ki > 0, for i = 1, ⋯, 6, to let the second-order error characteristic equation in equation (12) satisfy the Routh–Hurwitz condition, that is, roots of equation (12) are all in the left-half complex plane. Then, the regulation errors can be guaranteed to converge to zero exponentially, that is,
Finger joint manipulating loop
Desired finger joint postures
In Figure 1, geometrical relations between the finger robot and the grasped object are shown. Yd = [Y1d, Y2d] is the desired final contact points between the dual fingers robot and an object. For the control purpose, the desired posture angles φd of the finger joints should be calculated based on desired final contact points Yd. The geometric constraints induced by rolling contacts can be expressed as follows

Positions of the desired final contact points in equation (13) can be formulated as the following vector matrix form

where
Namely, the three-joint angles of the dual fingers q can be calculated by referring to Yd and θ with the following transformation

where matrix A+ is the pseudo inverse of A.
By the geometric structure of the dual fingers, relation between finger angles vector q and the desired finger posture angles vector φd related to X-axis can be expressed by

where

For the purpose of deriving the desired finger posture angles φd with respect to the desired contact points Yd in finger joint manipulating loop, equation (15) is substituted into equation (16), and the completed transformation equation was derived as follows

Then, we can introduce the states in equation (17) into the dynamic equation of the dual fingers in equation (2), which is the second-order differential equation of φ. The contact forces F submitted in this loop should satisfy quantities in the first loop simultaneously. Accordingly, the dual fingers robot can be controlled within its physical properties and geometric constrains.
In the second loop, the design objective is tracking errors between three-joint angles of the dual fingers robot φ and desired angles φd should be proven to converge to zero optimally. The achievement of this converge also implies the posture of the desired contact points Yd that can be tracked by the dual fingers robot successfully. The desired posture φd ∈ C2 is assumed to be a twice continuously differentiable function. According to equation (17), we can obtain

with

Nonlinear closed-form H 2 control approach
For optimally manipulate finger joints to let contact points Y be regulated to the desired contact points Yd, a nonlinear H 2 control approach which can optimally control the finger joints and guarantee the globally stability of the fingers-object system will be derived as follows.
Define the posture tracking errors of the dual finger joints with respect to the desired posture angle φd as follows

From equation (2) and posture tracking errors described in equation (18), the dynamic equation for the defined tracking errors can be expressed systematically as follows

The error dynamic equation (19) is generally complex in structure and is difficult to be analysed directly. For finding a simple and effective control form, a filtered link ξ(t) and the state-space transformation matrix S as below are introduced to transfer the tracking error dynamics in equation (19) into an analysable form


where m is a positive constant scale, and M2 ∈ R6×6 is a positive definite matrix which will be determined properly later in this controller design.
Through this arrangement, equation (19) can be formulated as a compact form

where



with

Suppose the closed-form nonlinear H 2 control law u is chosen as follows

Then, substituting equation (23) into equation (22), the posture tracking error dynamic equation can be transformed as follows

Design objective and mathematical derivation of optimal
Design objective
Considering the posture tracking error dynamics in equation (24), and giving some weighting matrices V = VT > 0 and W = WT > 0, the cost function of this posture tracking problem can be described as 21 follows

The design objective of equation (25) is to find a closed-form nonlinear H
2 control law

The analytical solution

with

if P(e2, t) is found, a closed-form nonlinear H 2 control law which guarantees the global stability of the fingers-object system in equations (1) and (2) as below can be obtained for the finger joint manipulating loop

where

ii. Mathematical derivation for obtaining analytical solution
Based on the above analysis, suppose a closed-form solution P(e2, t) can be found from the time-varying Riccati-like equation in equation (27), then the nonlinear H 2 control law u (28) can be obtain as a briefly form. In general, it is difficult to derive a closed-form solution for the highly complex nonlinear time-varying Riccati-like equation as equation (27). On account of the state-space transformation matrix S which has been comprised in formulated process, without loss of generality, the solution P(e2, t) is suggested to be in more definite structure as follows

where Γ is a positive definite symmetric constant matrix. Moreover, the existential matrices S and Γ in equation (29) will be developed particularly in the following.
Substituting equation (29) into the second and third terms on the left-hand side of the nonlinear Riccati-like equation (27), we have

Similarity, part of the following term can be derived as follows

Using the results of equations (30) and (31), the Riccati-like equation (27) can be reduced to the following algebraic Riccati-like equation

Furthermore, the control vector of nonlinear H 2 control law in equation (28) can be written as follows

By choosing

where α > 0 and the weighting matrix V = VT > 0 can also be factorized by Cholesky factorization as

Substituting the definitions matrices N and V to Riccati-like equation in equation (32), the equality can be divided into four equalities as follows




By solving equations (36) and (37), we can obtain the submatrices as follows

To satisfy with equation (21) at the same time, the matrix S can be expressed as follows

We can easily derive the following result

Obviously, the matrix V11 should be arranged as diagonal form, and we define

Then, the scale m can be represented as follows

Based on the above derivation, the weighting matrix W is chosen as equation (34) for any finite α > 0, and the weighting matrix V > 0 can be analysed with submatrices V11, V12 and V22 which satisfy the requirements in equations (35) to (42). Then, the closed-form solution of the nonlinear H 2 posture tracking problem of dual finger joints can be obtained as follows

where

Global stability of the overall dual finger robot system
Suppose a bounded control commend F and a bounded regulation distance vector Y are given initially for the finger joint manipulating loop and the objective regulating loop, respectively, then, bounded tracking errors e1 and e2 for these two loops and a bounded regulation distance vector Y = [Y1 Y2]T can be obtained continuously based on the proposed hybrid control design until the grasping process is finished; meanwhile, the feedback linearization-based controller F in equation (9) and the H2 control commend u in equation (45) are bounded. Based on the above-mentioned facts, the following conclusion can be made: the overall dual finger robot system is at least global Bounded input Bounded Output (BIBO) stable.
Simulation results
In this investigation, one feedback linearization control law (FL) and one nonlinear H 2 control concept (H 2) are integrated as a hybrid control design (FL + H 2) for the grasping and regulating missions of dual fingers robots. For verifying the control performance of the proposed hybrid control design of dual fingers robots, a practical regulating mission based on a real finger robot’s model is precisely simulated by the famous software: MATLAB [Version R2013a]. The overall simulation process of the proposed method is illustrated as the flow chart in Figure 3. Clearly, there are two coupled subcontrol loops: One is used for the regulation of object and the other is used for the manipulation of finger joints, existing in the overall control flow.

The simulation process of the object’s posture regulation and the dual fingers’ manipulation.
Specifications of a dual finger robot and an object
The parameters of a real dual finger robot and an object are measured and listed in the Table 1.
Specifications of a dual finger robot and an object.

Control parameters
Control parameters of the proposed hybrid control design are selected as those in Table 2. These chosen parameters satisfy the existence restrictions for the proposed FL + H 2 design and enable the proposed method to be with perfect control performances.
Control parameters of the hybrid control design.

Initial conditions and scenario 1
For verifying the grasping performances of the proposed hybrid control law with control parameters in Table 2, one scenario with initial conditions in Table 3 and the desired conditions in Table 4 are initiated.
Initial conditions of the fingers-object system.

Scenario 1: Desired objective.

Control performance verification
Scenario 1 is used to verify the optimal control performance of the hybrid FL + H 2 control design. As mentioned above, the design target of the object regulation loop is to converge the object’s posture Θ = [x, y, θ] to the desired posture Θ d = [xd, yd, θd], and the proposed feedback linearization control law for this object regulation loop can be constructed using control gain matrices K1 and K2 which were chosen in Table 2 earlier. Based on these two control gains, the control forces F in equation (9) can be realized to effectively regulate and grasp the object by ΔF in equation (10) and Fd in equation (11), respectively. Simultaneously, the control and state messages F and θ of this control loop are provided to the finger joint manipulating loop for the decoupling purpose.
Simulation results of the object regulation loop with respect to scenario 1 are shown in Figures 4 to 6. For scenario 1, the trajectory histories of Θ = [x, y, θ] after control are shown in Figure 4, and all the tracking errors are shown in Figure 5. This proposed method reveals a quicker regulating response in either X-axis or Y-axis. The corresponding control forces F for achieving the posture regulation mission are shown in Figure 6. The normal control forces f1 and f2 still maintain with a desired value of 0.3 N for letting the gripper to be capable of holding the object in the desired posture, and the zero value of the tangential forces λ1 and λ2 means that there is a non-slipping condition built up for the grasped object and the controlled finger robot. Figures 7 to 11 reveal the histories of states, positions of contact points Y, posture tracking errors e2 between contact points Y and desired targets Yd and control torques u of the dual finger robot. From the histories of the contact points Y and the convergence of tracking errors e2, the proposed H 2 closed-form controller performs the promising control performance to globally and exponentially converge the tracking errors to zero, that is, Y globally and exponentially converges to Yd, even under the coupling effect of the first object regulation loop.

The regulation histories of the object posture in scenario 1.

The regulation errors of the object posture in scenario 1.

The histories of control forces F in scenario 1.

The tracking histories of the finger angles (right finger and left finger) in scenario 1.

Histories of the tracking error of the finger angles (right finger and left finger) in scenario 1.

The tracking histories of the contact points Y in scenario 1.

Histories of the tracking errors of the contact points in scenario 1.

Histories of the optimal control torque u = [u1 u2] T of the finger joint manipulation loop in scenario 1.
For verifying the grasping performance of this proposed method in practice, the three-joint dual finger robot shown in Figure 2 is integrated with a two-link robot arm 22 controlled with the feedback linearization control method. The dimensions of the link lengths of the robot arm are 100 and 80 cm, respectively. A lifting and grasping illustration of the integrated robot grasping design is shown in Figure 12(a). In this simulation, an object is set to be grasped by the dual finger robot and be lifted by the robot arm. The initial location and inclined angle of the object is (x, y, θ) = (0 cm, 0 cm, 0°). This object is grasped first with nonslip forces and then is moved by the controlled robot arm to the next location (x, y, θ) = (15 cm, 30 cm, 0°). In the third stage, the grasped object is regulated to the desired position and posture (xd , yd , θd ) = (20 cm, 38 cm, 2°) with our proposed method. Figure 12(b) shows the trajectory of the grasped object from standing on the table to the air. From the simulation result, it is obvious that this proposed method can cooperate with the developed robot arm completely.
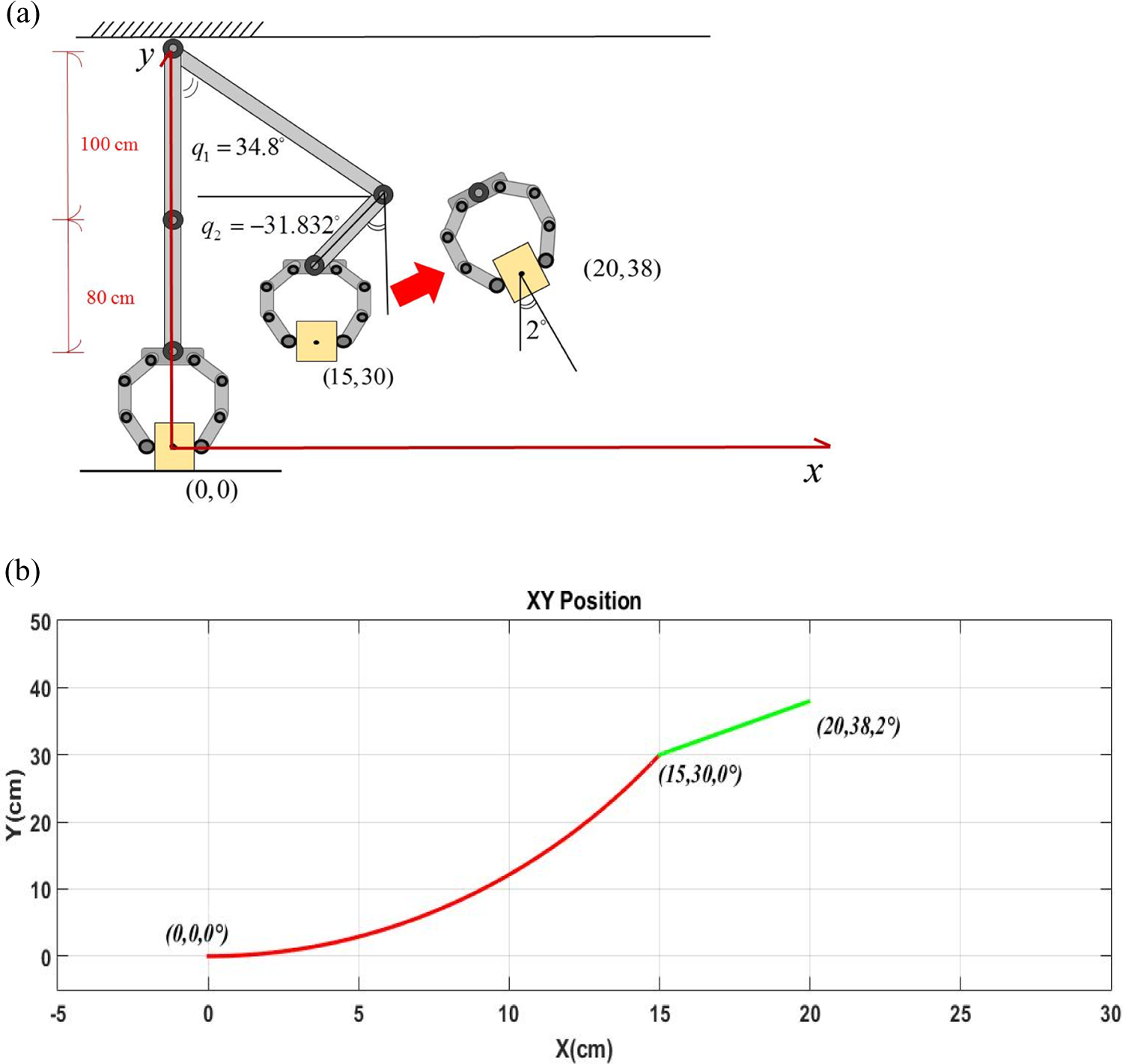
(a) An illustration of an integrated object grasping system for lifting an object which stands on the table with initial condition (x, y, θ) = (0 cm, 0 cm, 0°) to a desired location and posture (xd , yd , θd ) = (20 cm, 38 cm, 2°). (b) Trajectory of an object which initially stands on the table with initial condition (x, y, θ) = (0 cm, 0 cm, 0°) and is then moved by an integrated object grasping system (a) to a desired position and posture (xd , yd , θd ) = (20 cm, 38 cm, 2°).
Conclusions
In this study, a hybrid control design which combines feedback linearization method and nonlinear H 2 control concept is developed successfully for three-joint dual finger robots dealing with the object regulation problems. By solving the coupling effect between the object regulating loop and finger joint manipulation loop, this proposed method can effectively converge the object regulation errors and finger joint posture errors to zero and regulate the grasped object to the desired position globally. Besides, an easy-to-implement structure is also obtained in this investigation due to the closed-form solution of this nonlinear regulation problem is solved directly from the corresponding nonlinear time-varying Riccati-like equation, and this contribution has never been proposed before for the regulation design of finger robots. From the simulation results, it is obvious that the proposed method achieves satisfactory control performances and exhibits excellent regulation and manipulation abilities.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.