
Abstract
An adaptive variable structure control strategy is proposed for the output tracking control of input delay non-minimum hypersonic flight vehicles. The problem is challenging because of the complex nonlinearity of hypersonic flight vehicles and the existence of input delay. The nonlinear model of hypersonic flight vehicles is partially linearized, and a state tracking model is constructed based on the ideal internal dynamics of hypersonic flight vehicles. A filtered tracking error is introduced to handle the input delay. A variable structure control strategy is proposed for the stability of filtered tracking error system, and an adaptive law is established for the unknown perturbations. Finally, the effectiveness of the proposed control method is shown by the simulation results.
Keywords
Introduction
Hypersonic flight vehicles (HFVs) are a kind of vehicles which can launch low earth orbit satellites in a more low cost, provide rapid global-response capabilities, and be repetitious used. Because of the important military and civil applications foreground, the guidance and control of HFVs have been the main objective of researchers. 1 HFVs adopt air-breathing scramjet engines, 2 which can obtain oxygen from atmosphere, so compared with traditional flight vehicles, this kind of vehicles can carry more payload. Due to integration of airframe system and scramjet propulsion system, the couplings of the nonlinear dynamics of HFVs are very strong, and the parameters of aerodynamic forces vary very fast, so the nonlinear dynamics of HFVs are extremely complex. In addition, because of the high flight speed and the existence of various random disturbance, the robustness of HFVs’ control system is high. All of the above ingredients make the design of guidance and control strategies of HFVs a challenging task.
The control of HFVs has been widely studied, 3,4 and since a nonlinear model of HFVs including flexibility effects is built by Bolender and Doman, 5 the flexible HFV model has been the main objective of researchers. Plenty of control strategies have been proposed for the flexible HFV model, such as adaptive sliding mode control 6,7 and linear output feedback control. 8 The above methods are all based on the linear model of HFVs, which is linearized around the equilibrium point of HFVs. Since the nonlinear dynamics of HFVs are complex and the parameters of aerodynamic forces vary very fast, a linear model cannot approximate the nonlinear model exactly. In this case, nonlinear control design methods are introduced for the control of HFVs. In the study of Hu et al., 9 Takagi–Sugeno (T–S) fuzzy approach is utilized for modeling and control of HFVs, and then, a fuzzy guaranteed cost control is proposed. In the work of Xu et al., 10 neural network is also utilized to approach the nonlinear dynamics of HFVs. But the T-S fuzzy modeling and neural network-based approaches tend to be unaccepted complex along with the growth of the nonlinear system’s complexity, and because of the complexity of HFVs nonlinear dynamics, the conservative and solving difficulty of T-S fuzzy approach seem to be hard. 11 Nonlinear adaptive control 12 and backstepping control 13,14 have also been applied for control design of HFVs, and in the work by Hu et al., 15 a stable inversion-based controller is proposed for the exact output tracking of HFVs, and the non-minimum phase characteristic is analyzed by phase portrait. Because of the computing speed and nonlinear dynamics of the actuator, input delay is inevitable for HFVs. The existence of input delay may affect the stability and control performance of HFVs, so input delay must be considered for the control design of HFVs. The input delay problem of HFVs has drawn much attention and has been studied by Li et al., 16 but the method proposed is based on the linear model of HFVs. To the best of our knowledge, a controller for input delay non-minimum phase model of HFVs has not been discussed.
A nonlinear non-minimum phase system is that the internal or zero dynamics of the system are unstable. The tracking control of this kind of system is highly challenging, because of the unstable internal dynamic, which would drive the system to be unbounded. Traditional controller design methods of nonlinear system, such as backstepping control, sliding mode control, and dynamic inversion, are not suitable for a nonlinear system with non-minimum phase characteric, 17,18 especially when input delay occurs. The nonlinear dynamic of HFVs is a non-minimum phase system, and the actuators of HFVs are fuel-to-air ratio Φ and elevator deflection δe. Input delay of Φ and δe is inevitable, so the effect of input delay cannot be ignored when designing a controller for HFVs, a controller against input delay for HFVs is necessary.
Motivated by the above discussion, an adaptive variable structure control (VSC) is proposed for HFVs with input delay. Firstly, the nonlinear model of HFVs is input/output linearized, and according to the diffeomorphism coordinate transformation, the internal dynamics of HFVs are constructed. An ideal internal dynamics (IID) 19 based control strategy is utilized to transform the output tracking of HFVs into a state tracking one. 20 A filtered tracking error is defined to handle the input delay of the non-minimum system into an input delay-free one. For guaranteeing the output tracking performance of HFVs, an adaptive VSC strategy is proposed. By choosing appropriate adaptive parameters and adaptive law, the proposed VSC can guarantee the global stability in the existence of input delay. Comparison results are provided to verify the availability of the proposed method.
The rest of this article is as follows. The control objective is presented in the “Problem formulation” section, and the steps of the design of adaptive VSC for input delay HFV model are given in the “Adaptive VSC design” section. The results are presented in the “Simulation results” section, and we finish this article in the “Conclusion” section.
Notation. The notation used throughout the article is fairly standard. The superscript “T” denotes matrix transposition; ℝ
n
denotes the n-dimensional Euclidean space; and the notation P > 0 means that P is real symmetric and positive definite. y(i) is the i th derivative of y with respect to time. ǁ • ǁ is the usual Euclidean norm. λmax(A) represents the maximal eigenvalue of matrix A.
Problem formulation
Model description
The nonlinear model of HFVs considered here is developed by Bolender and Doman,
5
and the nonlinear dynamics are shown as follows associated with a reference frame of HFVs in Figure 1


Reference frame of HFVs. HFV: hypersonic flight vehicle.
The details and expressions of T, L, D, M, N1, and N2 are listed in the study by Parker et al. 21 and are shown as follows
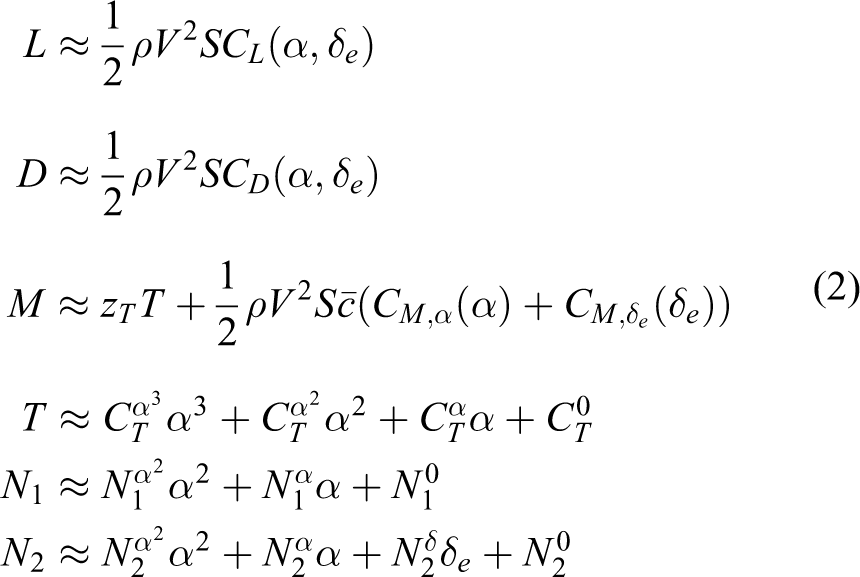
with

For analyzing conveniently, the nonlinear equations (1) to (3) are rewritten as an affine form. Devoting equations (2) and (3) into equation (1), the affine form of HFVs can be got

This nonlinear affine model contains both rigid-body state and flexible states, to be specific, five rigid-body state variables

where


Input/output linearization
The output of affine model (4) is
where

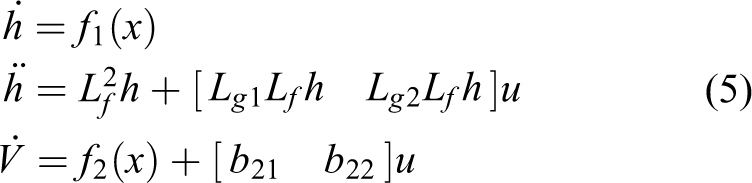
The relative degree of affine model (4) is rh = 2 and rV = 1. Then, the internal dynamics can be constructed according to the appropriate diffeomorphism coordinate transformation. According to the analysis of our previous work, 15 the internal dynamics of HFVs are unstable, so the model of HFVs is an multi-input multi-output nonlinear non-minimum phase system. The details of the constructing and analyzing of the internal dynamics can be found in the work of Hu et al. 15
Considering input delay of HFVs, the nonlinear model can be transformed into the following form
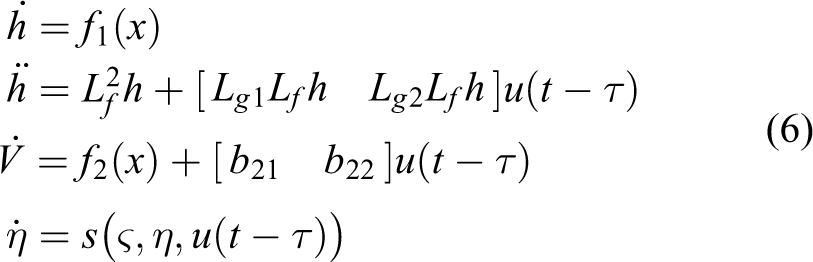
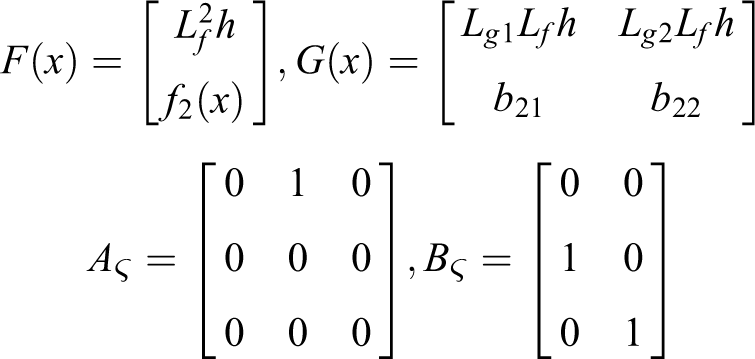
where η is the internal state,


where
Remark 1
In most literatures, the internal state function is usually written as a standard form,
Remark 2
In equation (7), we introduce a virtual controller
Control objective
Since the internal dynamic of HFVs is non-minimum phase, the controller design method is different from the minimum ones. The designed controller should not only meet the tracking performance but also guarantee closed-loop stability. When input delay occurs, the controller design for HFVs becomes extremely complex. An IID-based state tracking method for the tracking control of HFVs has been proposed by Hu et al. 11 IID is an ideal trajectory of internal dynamics, which is driven by the given trajectory yd and its differentiation. For the application of this method, the following assumption is needed.
Assumption 1
The given reference trajectory
After getting IID, the output tracking problem is rewritten as the following state tracking one

where

where (ς0, η0) is the equilibrium point of equation (1),
Then, the tracking control objective of HFVs with input delay is to find a controller for state tracking model (10), which can guarantee the closed-loop stability in the existence of input delay.
Adaptive VSC design
In this section, the tracking control of non-minimum phase HFVs with input delay is analyzed, and an adaptive VSC is proposed. For dealing with the input delay τ, define

where ep is the finite integral of past control. Then, define the filtered tracking error as

The following assumptions are used throughout the article.
Assumption 2
The finite integral of past control values ep is bound by an unknown positive scalar ρ1, such that

Assumption 3
The nonlinear function G(x) is already known, and bounded away from zero, such that

where ρ2 is an unknown positive scalar.
Assumption 4
The nonlinear perturbation d is bound by an unknown positive scalar ρ3, such that

From equations (9) and (12), we can get the filtered tracking error
where

Remark 3
Since the past control u(t − τ) is already known at time t, the finite integral of past control ep and
Then, we can design a controller for the filtered tracking error

where
P is a positive definite matrix, K is the gain matrix, P and K will be designed later, and C is the switching gain and will be analyzed later.
Theorem 1
Consider the filtered tracking error system (13), suppose Assumptions 1 to 4 are satisfied. If there exist a positive definite matrix P and a matrix K, for a given symmetric positive definite matrix Q, the following inequation satisfied

and the switching gain
Proof
Choose the Lyapunov function of equation (13) as

Taking the time derivative, we have

From equation (16), we can see that

then

From Assumptions 2 to 4, G(x), d, and ep are all bounded, so the norm of

so we can choose an appropriate switching gain C, satisfied

Then, from equations (18) and (19)

The proof is completed. ▪
Then, we just need to choose a switching gain C; the tracking error will be bounded. From Assumptions 2 to 4, ρ1, ρ2, and ρ3 are all unknown, so we commonly choose a bigger value for C to stabilize the tracking system, which aggravates the chattering of VSC. To overcome this defect, an adaptive law is proposed. The unknown upper bound of

where

Theorem 2
Consider the filtered tracking error system (13), suppose Assumptions 1 to 4 are satisfied. If there exist a positive definite matrix P and a matrix K, for a given symmetric positive definite matrix Q, the following inequation satisfied

The closed-loop filtered tracking error (equation (13)) is asymptotically stable with adaptive VSC law (20), and the adaptive law is chosen as

with
Proof
Choose the Lyapunov function of equation (13) as
where

From equation (22),

The proof is completed. ▪
The filtered tracking error system (13) is asymptotically stable and es tends to be zero under the adaptive VSC (equation (20)), and the finite integral of past control is bounded; nonlinear function G(x) is Lipschitz, so the tracking error e of equation (9) is tended to be bounded.
Remark 4
For the VSC system, chattering is a common phenomenon,
23
which is usually caused by the term of sign(S) in the VSC of equation (20). To reduce the chattering phenomenon, one simple and useful way is to replace the term sign(S) by
Simulation results
A numerical example is provided to evaluate the proposed controller design method. The equilibrium point of equation (1) is listed in Table 1. According to the equilibrium point, the details of A and B can be computed

Trim condition.

Based on the analysis of “Adaptive VSC design” section, suppose

In simulation, the nonlinear perturbation d is assumed to be a random disturbance

where dmax is the maximum absolute value and dmax = 0.1, N(•) denotes the normal distribution with mean zero and standard deviation one. The parameter q of adaptive VSC law is set to be q = 0.01 and δ = 0.01.
A stable inversion-based controller for HFVs without input delay proposed by Hu et al. 15 is utilized here for comparing. The stable inversion controller is

where

For getting a smooth trajectory, the given step reference signal is forced to pass a second-order prefilter

where ζ = 0.9 and
The IID of equation (1) can be constructed by stable inversion method.
15
The reference command hd, Vd, and their time derivatives

hd and its derivatives

Vd and its derivatives
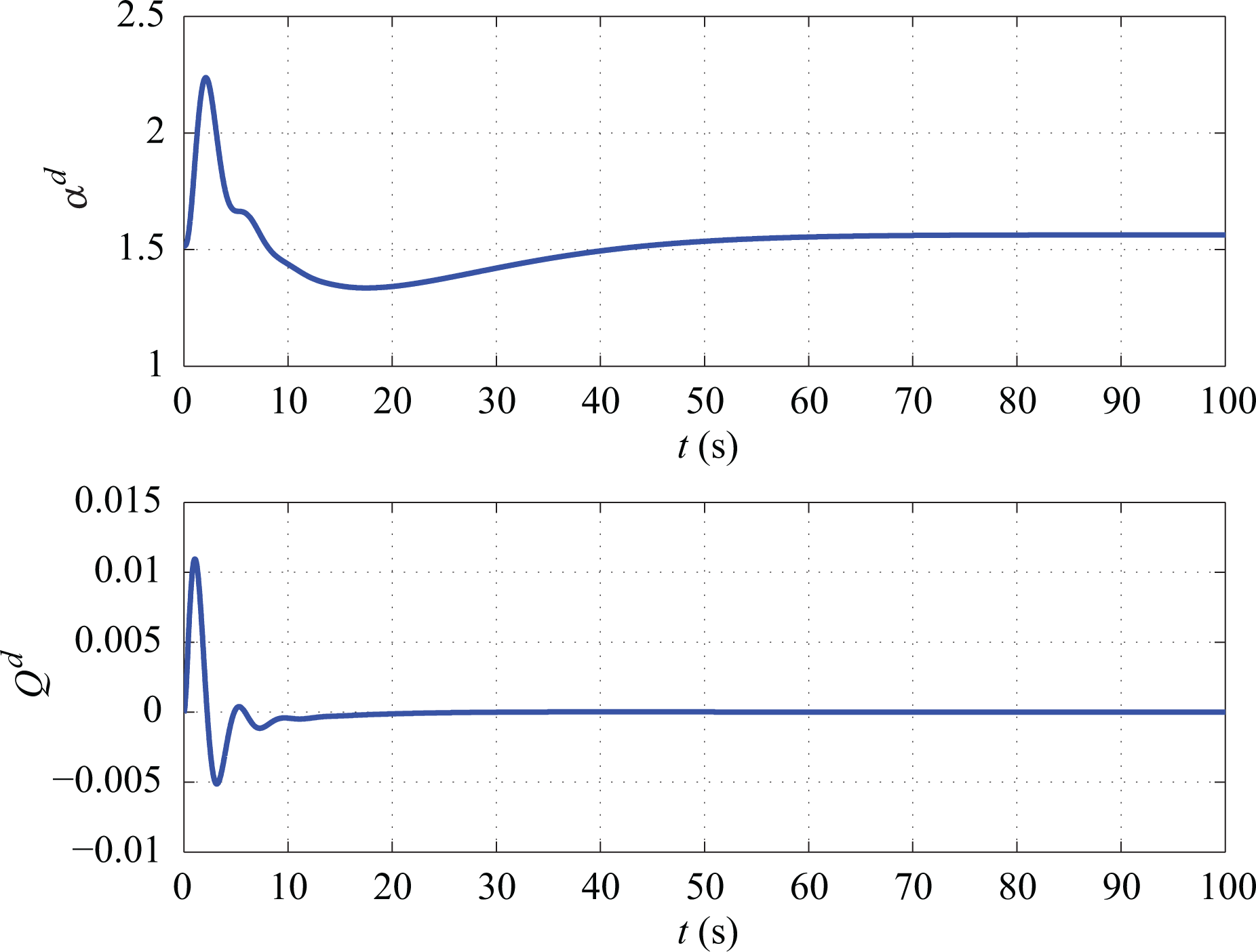
IID of αd and Qd. IID: ideal internal dynamics.

IID of

IID of
Firstly, ud is carried on the nonlinear model of HFVs with input delay, and τ = 0.1. The tracking responses are depicted in Figures 7 and 8. From Figure 7, we can easily see that the tracking error is unacceptably big. So, the tracking performance of ud is not so good when the input of the system is delay. What is more, the input of ud is very big, and the system actuator of HFVs cannot provide such an input for the plant.

Tracking performance of ud with input delay.

Input of ud with input delay.
Secondly, the proposed adaptive VSC uad is carried on the nonlinear model of HFVs with input delay and τ = 0.1. The tracking performance of uad is shown in Figure 9. The inputs of the plant are also given in Figure 10. As can be seen from Figure 10, the tracking error remains bounded and acceptably small, and the input of the plant is within the physical limits of HFVs. From the simulation results, the validity of the proposed controller can be easily testified.
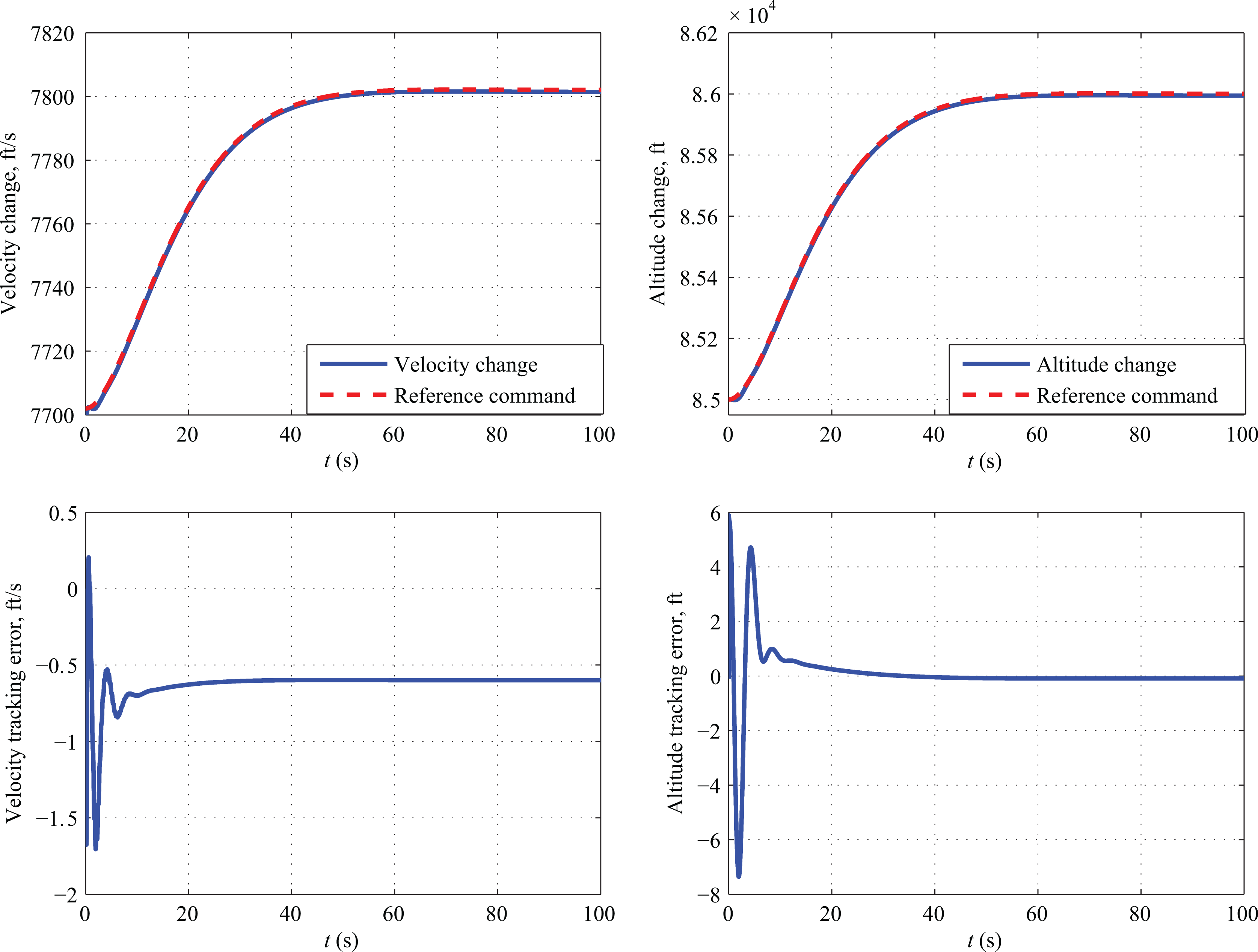
Tracking performance of uad with input delay.
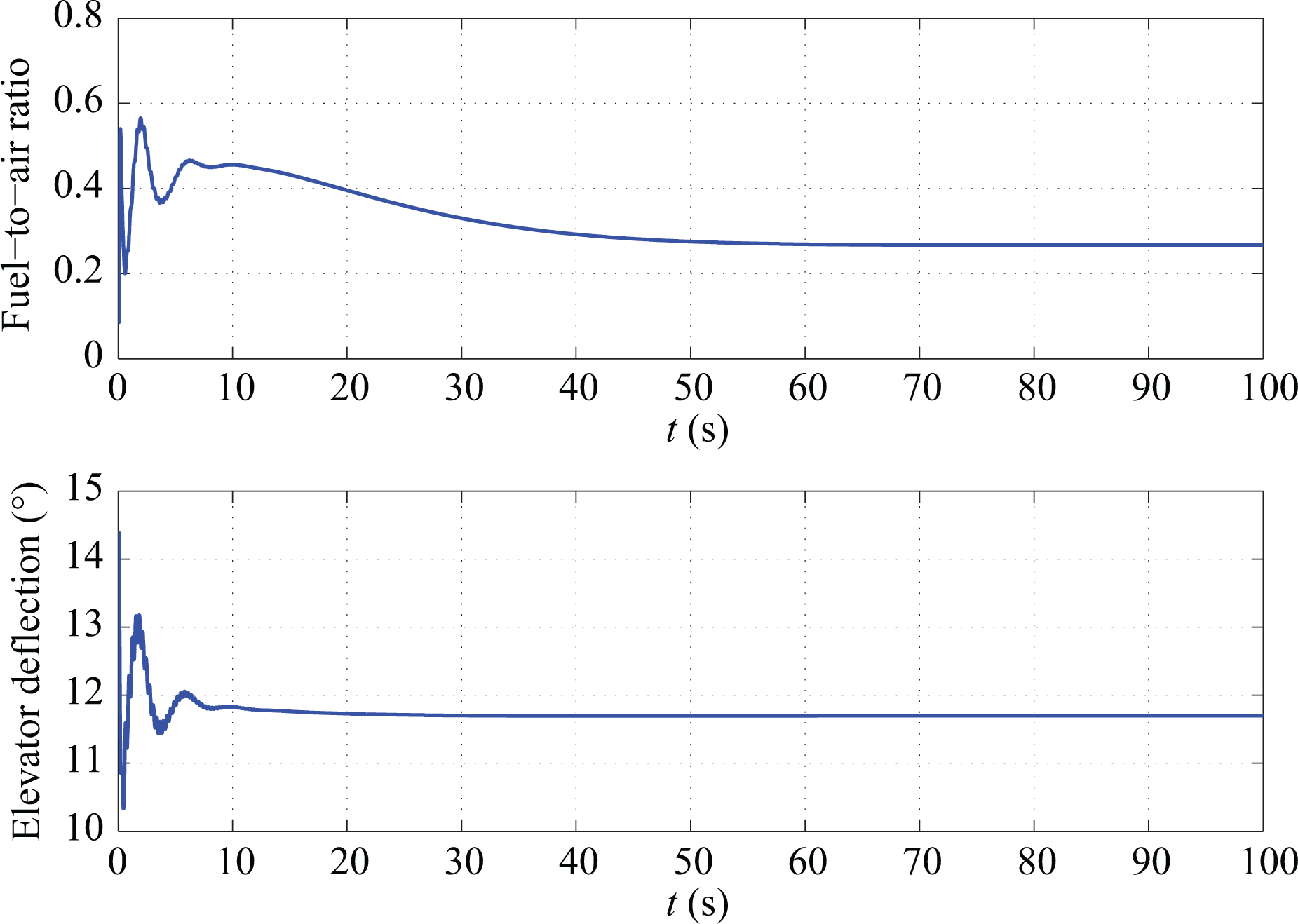
Input of uad with input delay.
Conclusion
In this article, the exact output tracking of input delay non-minimum phase of HFVs has been addressed. A VSC strategy, together with an adaptive law, has been derived. The original model of HFVs has been partially linearized, and a state tracking model has been constructed based on the appropriated diffeomorphism coordinate transformation and the computed IID. For dealing with the input delay, a filtered tracking error is introduced, and then, the input delay system is transformed into a delay-free one with nonlinear perturbation. An adaptive VSC strategy has been proposed to guarantee the stability of the closed-loop system. The simulation results have validated the effectiveness of the proposed control methods.
The method proposed in this article can deal with input delay problem of HFVs for which τ is already known. Via simulation, we find that when the input delay τ > 0.16, the filtered tracking error es tends to be unbounded, which means that the proposed method cannot deal with input delay greater than 0.16. Further work is needed to increase the input delay τ which can be dealt with using the proposed method and to extend the method to the time-varying input delay case.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by National Natural Science Foundation of China (61304001, 61304098, and 11602296).