
Abstract
A robust adaptive neural control scheme based on a back-stepping technique is developed for the longitudinal dynamics of a flexible hypersonic flight vehicle, which is able to ensure the state tracking error being confined in the prescribed bounds, in spite of the existing model uncertainties and actuator constraints. Minimal learning parameter technique–based neural networks are used to estimate the model uncertainties; thus, the amount of online updated parameters is largely lessened, and the prior information of the aerodynamic parameters is dispensable. With the utilization of an assistant compensation system, the problem of actuator constraint is overcome. By combining the prescribed performance function and sliding mode differentiator into the neural back-stepping control design procedure, a composite state tracking error constrained adaptive neural control approach is presented, and a new type of adaptive law is constructed. As compared with other adaptive neural control designs for hypersonic flight vehicle, the proposed composite control scheme exhibits not only low-computation property but also strong robustness. Finally, two comparative simulations are performed to demonstrate the robustness of this neural prescribed performance controller.
Keywords
Introduction
Research effort of hypersonic flight vehicle (HFV) has drawn considerable attention during the past several years, because it can provide large time reductions within both civil and military flight activities. 1 –3 The success of the experimental aircraft NASA’s X-43A has affirmed the feasibility of this technique. 3 Unfortunately, the control of HFV is still confronted with a large amount of intractable issues, such as the famous vibrational effects caused by slender geometry and special structures of HFV, intensely coupling between engine system and aerodynamic force and the variation of vehicle characteristics with different flight conditions. 4 Thus, in order to keep the flight stability and safety of HFV, transient and steady-state performance characteristics are desirable to be ensured through suitable controllers.
In the literature, due to lack of experimental date on lateral model of HFV, the control problem of HFV mainly focuses on the longitudinal channel. The sum of squares/robust linear matrix inequation method is proposed to design the nonlinear controller for the longitudinal dynamics of HFV with parametric uncertainties. 5 Utilizing the Takagi-Sugeno (T-S) fuzzy modelling technique to approximate the nonlinear dynamics of HFV with modelled and unmodelled disturbance, a robust disturbance observer mixed H2/H∞ controller is designed for the obtained T-S fuzzy model. 6 To provide stable tracking of the velocity and altitude reference trajectories, a high-order extended state observer-enhanced control is adopted to improve the tracking performance. 7 By employing the input/output linearization technique to transform the nonlinear model of HFV, a back-stepping technique–based exponential sliding controller is proposed and analysed for the longitudinal dynamics with mismatched uncertainties. 8 Moreover, some other sliding mode control schemes, such as super twisting sliding mode control, 9 high-order sliding mode control 10,11 and recursive terminal sliding mode control 12 , are also proposed to design the control system of HFV in the presence of parametric uncertainties. In addition to the aforementioned control method, numerous significant approaches have been applied to tackle the control problem of HFV, including linear parameter varying control, 13 minimax linear quadratic regulator (LQR) control, 14 back-stepping-based method, 3,4,15 –17 predictive control 18 as well as neural/fuzzy approach. 19 –22 Approximation-based adaptive back-stepping control methods have been widely researched for a nonlinear strict-feedback system, 23,24 and the noteworthy problem of ‘explosion of items’ is elegantly overcome by introducing a dynamic surface control (DSC) technique (low-pass filter) in the control design. 25 –28 More specifically, adaptive neural control with the back-stepping technique has also been extensively developed for HFV control. 29,30 Noting another fact that the operation mode of engine system has rigorous demands on actuators as well as HFV states, the constraints should be considered in the controller design from a practical perspective. 31 To ensure relatively satisfying control performance of HFV when physical limitations are in effect, a compensation system is first used to avoid actuator constraint problem. 31 After that, other kinds of compensation mechanisms have emerged and evolved to deal with this issue. 32 –35 Similarly, command filter–based adaptive back-stepping control is also investigated for HFV in the presence of constraints on system states and actuators. 36,37 Despite the prominent progress in adaptive neural control methods of HFV, a common characteristic of aforementioned outstanding works is that transient performance is often neglected; only the convergence of the altitude and velocity tracking errors to a residual set are established. 38 –40
Recently, the study of prescribed performance control (PPC) methodology has drawn considerable attention. 39,41,42 The PPC represents that the tracking error should converge to a predefined bound accompanying with the convergence rate no less than a certain value. 41,43 By exploiting an output error transformation technique, an adaptive PPC method is first developed for a strict-feedback nonlinear system. 41 Afterwards, Bu et al. 42,44 have proposed a control scheme by integrating a PPC technique and neural network (NN) to cope with the output constraint problem of HFV. The control scheme presented in the studies by Bu et al. 42,44 ensures prescribed transient and steady-state performance in the presence of parameter uncertainties. However, those approaches cannot be utilized to tackle the state constraint problem, and the stability analysis of the constrained state needs to be investigated further. Subsequently, a low-complexity approximation-free PPC scheme has been employed to the control of HFV. 45 Although the prescribed performance problem has been tackled, the actuator saturation problem is not considered in it, and there indispensably exist the strict assumptions for nonlinear function with this control scheme. To the best of the author’s knowledge, so far, a composite low-computational neural controller, which is capable of handling actuator and state constraints as well as guaranteeing prescribed performance on transient and steady-state behaviour of the output tracking errors, simultaneously, has not been investigated for HFV.
Motivated by the aforementioned discussion and the control approach,
46
a robust adaptive neural PPC scheme is studied for flexible HFV with model uncertainty and actuator constraints. First, on the basis of the functional decomposition, the longitudinal model of HFV can be divided into altitude and velocity subsystems. NNs are employed to estimate the unknown items, thus the prior information of the aerodynamic parameters is no longer needed. Using the PPC technique, an adaptive neural controller is proposed, which is able to ensure the output tracking errors confined in the prescribed bounds, while the issue of state tracking error constraint is also addressed. In order to deal with the problem of ‘increase of NN’ updating parameters’ and ‘explosion of the items’ in a conventional neural back-stepping method, the minimal learning parameter (MLP) technique and ‘first-order sliding mode differentiator (FOSD)’ are used in the control design. Consequently, a low-computational control scheme is obtained. Using an assistant compensation system, the problem of actuator constraint is also eliminated. The contributions of this article are shown as follows: In contrast to the approach in the study by Bechlioulis and Rovithakis
46
, MLP and DSC techniques are incorporated into the controller design, which avoids the problem of increase of NN learning parameters and explosion of the items’, thus deriving a low-computation design. Compared to previous constraint control schemes,
36,37
a composite adaptive neural PPC method, which is capable of handling actuator and state constraints as well as guaranteeing prescribed performance on transient and steady-state behaviour of the output tracking errors, is first presented, and a new type of adaptive law is constructed by synthesizing the PPC and MLP technique in the back-stepping design procedures. Rigorous Lyapunov analysis has been conducted to prove the stability of this control scheme. Meanwhile, comparative simulations are performed to highlight the robustness of the proposed neural prescribed performance controller.
HFV model and some preliminaries
HFV model
The model of HFV used in this study is based on the study by Parker et al. 2 The HFV model includes system states (V, h, α, γ, q), flexible states (η1 and η2) and control inputs (δe and Φ), where V denotes the velocity, h denotes the altitude, α represents the angle of attack, γ denotes the flight path angle, q denotes the pitch rate; δe and Φ denote the elevator deflection and the fuel equivalence ratio, respectively 4,47,48






where m, Iyy and g denote the mass of HFV and the moment of inertia and gravity. T, D, L and MA denote the thrust of the engine, drag force, lift force and pitching moment, respectively. 23,47 The related definitions are given as follows




The explanation of the other parameters can be referred to the study by Parker et al. 2
Model transformation
Altitude subsystem
Consider x1 = h, x2 = γ, x3 = θ, and x4 = q, where θ = α + γ and

where y is the output signal of altitude subsystem (7), f2(X2) and f4(X4) are unknown functions with the formulation
Velocity subsystem
Velocity subsystem (1) is transformed into equation (8) shown as follows

where
Remark 1
Since we only consider the cruise phase in this article, γ is quite small so we can take sinγ ≈ γ in equation (2) to simplify the model.
Remark 2
Considering the fact that the existence of flexible states η1 and η2 is hard to be measured directly, we regard η1 and η2 as a part of lumped nonlinear function. Thus, the controller design only depends on system states (V, h, α, γ, q).
Prescribed performance
In this section, we will generalize the preliminaries of PPC.
43,49
To achieve the control objective, the tracking errors


where

where λi0, λi∞ and li are design positive constants;
To transform the constrained tracking error condition (9) into an equivalent unconstrained one, the following transformation is employed. We have

where

The derivative of equation (11) is

Useful function and key lemmas
Lemma 1
For any ω0 > 0 and η ∈ R, the following inequality is established 23

where κ0 is a constant satisfying
Lemma 2
The FOSD is shown as follows

where ςi1 and ςi2 are the system states,
Controller design and stability analysis
The control objective in this study is to design a composite adaptive neural prescribed performance controller u and Φ to steer system outputs such as h and V to track their corresponding desired reference signal hd and Vd with their tracking errors confined to the prescribed performance bounds.
Assumption 1
Assume that the system states are measurable, and there is no time delay in the signal transformation.
Assumption 2
Systems (7) and (8) satisfy
Obviously, there are ideal weight vectors

where εi and εiM denote the approximation errors and their bounds, respectively. To decrease the computational burden, the MLP scheme is employed to update NN parameters. Those parameters are defined as
Altitude controller design
To proceed the design process and tackle the actuator saturation problem, 25 the assistant system (17) is constructed to generate ξ1

where

where
The coordinate change (19) is built shown as follows

where α1, α2 and α3 are middle controllers being established at steps 1, 2 and 3, respectively. yd = hd is the reference altitude signal. The control scheme for the altitude subsystem is developed via a back-stepping technique, which contains four-step recursive design procedure.
Step 1
The derivative of

Using equations (13) and (20), the derivative of the transformed altitude error μ1(t) is shown as follows

where
The virtual controller α1 is designed as follows

where k1 and k12 are the positive parameters.
By invoking equations (13) and (22), one has

Define a positive Lyapunov function

where
According to equation (23) and lemma 2, the derivative of L1 is shown as follows
Considering the following fact

Substituting equation (26) into equation (25) results in

where
Step 2
The differentiation of z2 is obtained as follows

Using equations (13) and (28), the derivative of μ2(t) is shown as follows

where
To avoid the complex computation of

where ς11 and ς12 are the states of the system (30), and μ11 and μ12 are the positive design constants.
According to equation (30), we have

where τ1 denotes the estimate error. Obviously, we have that
The controller r2 is designed as follows

where k2 and w2 are the positive design parameters.
The structure of adaptive control laws is expressed as follows


By substituting equation (32) into equation (29), it can be rewritten as follows

Choosing the candidate Lyapunov function

where
Using equations (33) to (35), the derivative of L2 is shown as follows

Next by considering the following facts



we have

Step 3
The differentiation of z3 is obtained as follows

The derivative of μ3(t) is shown as follows

where
In order to estimate the derivative of α2, an FOSD is applied the same with step 2. According to lemma 2, we have

where τ2 denotes the estimate error of FOSD with
Thus, α3 is shown as follows

where k3 > 0 is a control gain.
By substituting equation (45) into equation (43), we have

Choosing the following candidate Lyapunov function

Consider the following inequality

where
By invoking equation (48), the time derivative of L3 is obtained as follows

Step 4
The actual controller u will be established. The derivative of z4 is shown as follows

Using equation (13), the derivative of μ4(t) is developed as follows

where
As done previously, an FOSD is applied to estimate

where τ3 denotes the estimation error with
According to MLP and PPC techniques, the controller u is designed as follows

where k4 and w4 are the positive control constants.


where ρ41 > 0 and ρ42 > 0 are the positive design parameters.
Thus equation (51) can be rewritten as follows

Considering the candidate Lyapunov function

where
By invoking equations (54) to (56), results in the time derivative of L4 are as follows

Following facts can be obtained as follows


Thus, equation (58) can be rewritten as follows

Theorem 1
Considering the altitude subsystem (7), if the adaptive neural PPC laws are chosen as equations (22), (32), (45), and (53), and updated laws as (33), (34), (54), (55) as well as the parameters satisfied (65). Thus, the boundness of
Proof
We select the candidate Lyapunov function shown as follows

Substitute equations (27), (41), (49) and (62) into the derivative of equation (63), we have

where
The corresponding design parameters should be chosen such that

Define
Remark 3
Assumption 2 imposes a controllability condition on systems (7) and (8), which is rational and equivalent to most controllability condition of HFV in the literature. 17,21,47
Remark 4
By combining sliding mode differentiator, the MLP technique, a composite constrained adaptive neural PPC schemer, is presented, and a new type of adaptive law is constructed simultaneously. The proposed controller is not only able to ensure the state tracking errors confined in the desired performance sets but also owns low-computation since there is only one parameter online to be adjusted for each NNs.
Velocity controller
The velocity tracking error is defined as follows

where ξV is an assistant signal to compensate the saturation effect, and the additional auxiliary system is constructed as follows

where
The derivative of zV is described as follows

According to equations (13) and (68), the time derivation of the transformed error μV(t) is shown as follows

where
By employing the MLP technique, the controller Φ is designed as follows
where kV1 > 0 and wV > 0 denote designed control gains.
Consider the following adaptive laws for


where ρV1, ρV2, σV1 and σV2 denote the positive design parameters.
Theorem 2
Considering velocity subsystem (8), if adaptive neural controller is chosen as equation (70) and updated laws as equations (71) and (72). Then, the boundness of signals μV,
Invoking equations (69) and (70) yields

Considering the following candidate Lyapunov function

where
Based on equations (71) to (73), the derivative of LV is described as follows
Note that the following inequalities hold


By considering in equations (76), (77) and (78), equation (75) can be reformulated as follows
where
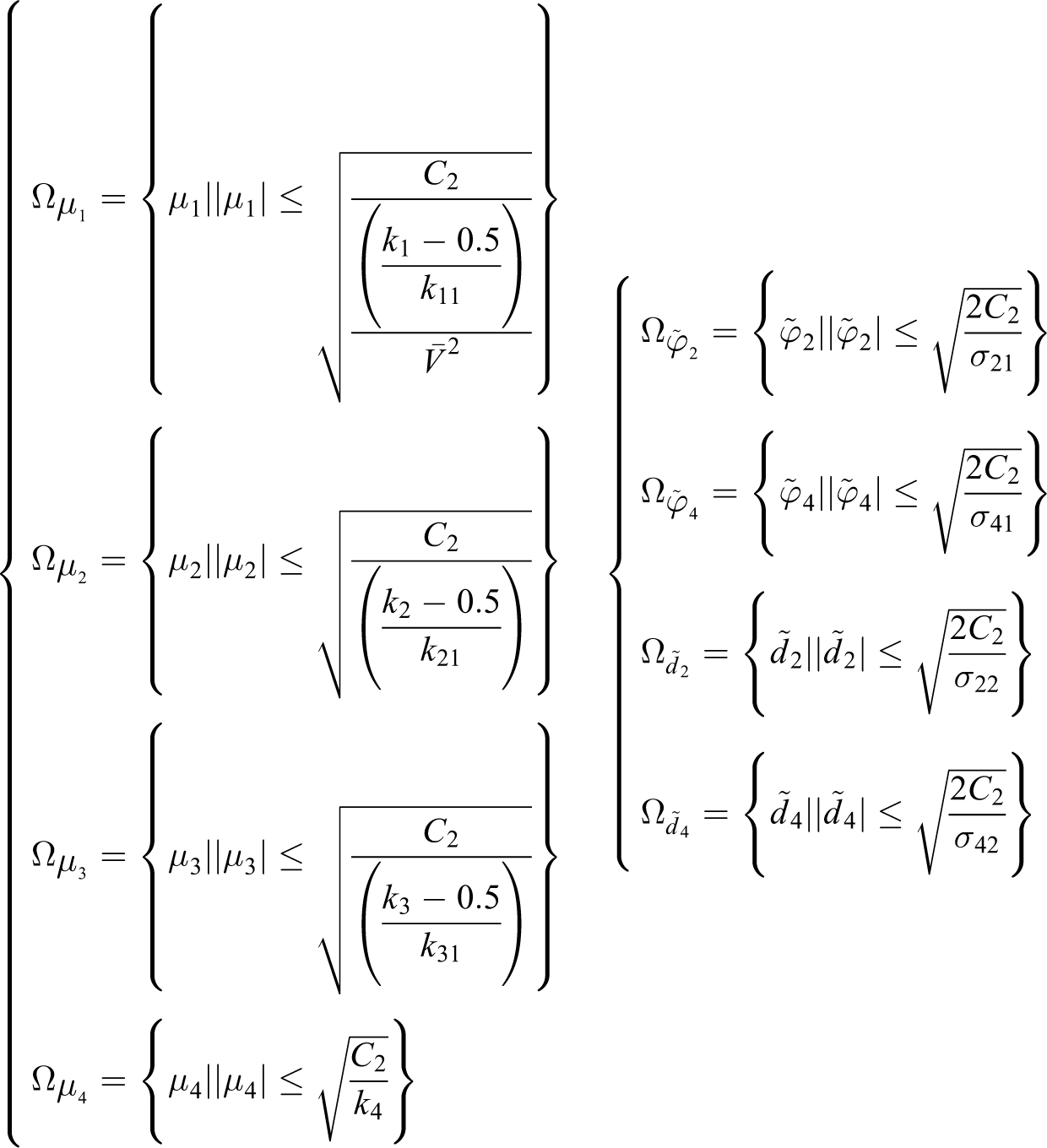
Define the following compact sets

If
Simulations
The model parameters of HFV are the same with the study by Parker et al.
2
The initial trim conditions are set as

Simulation 1
In the simulation, the initial tracking errors are assumed to be
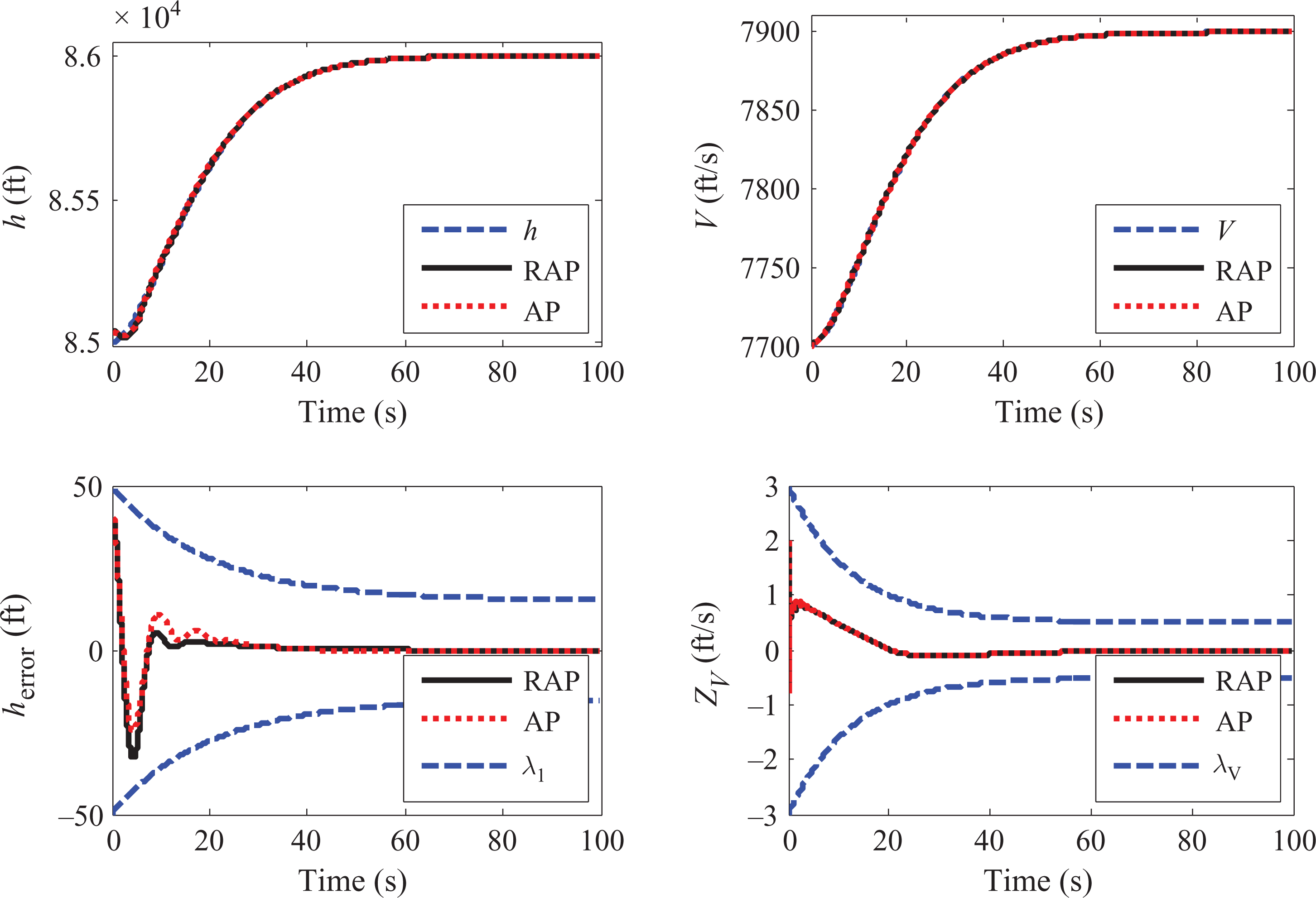
Altitude and velocity tracking.

System states and tracking errors.
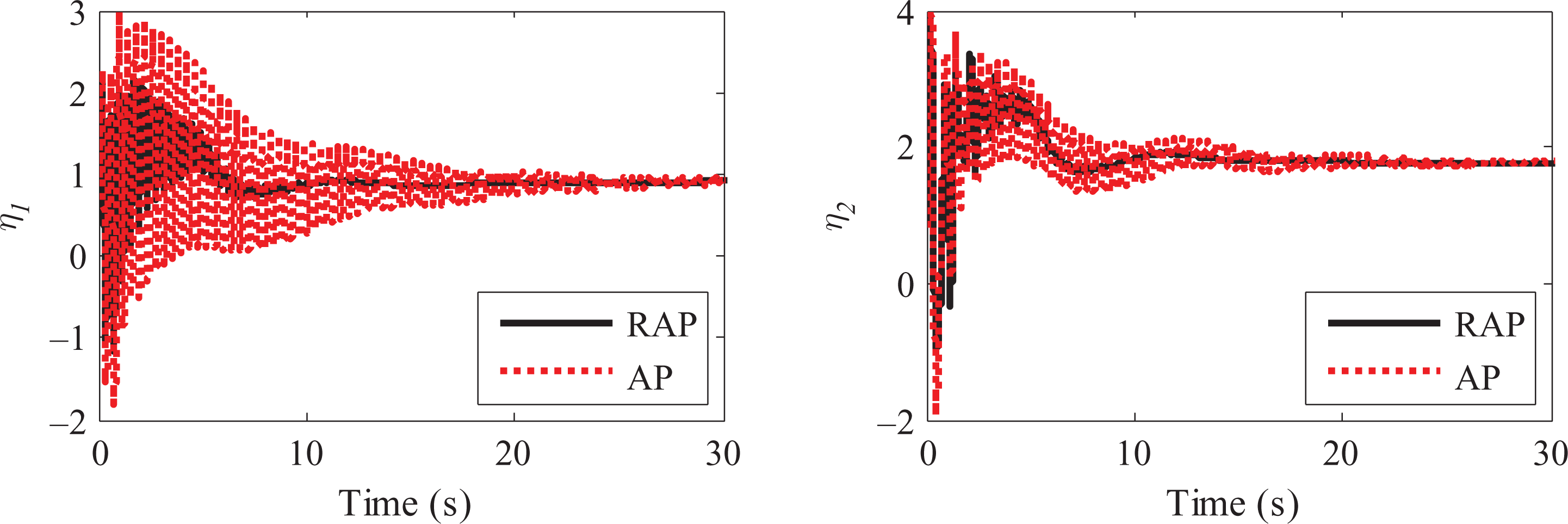
Flexible states.

Control inputs.

Assistant states.
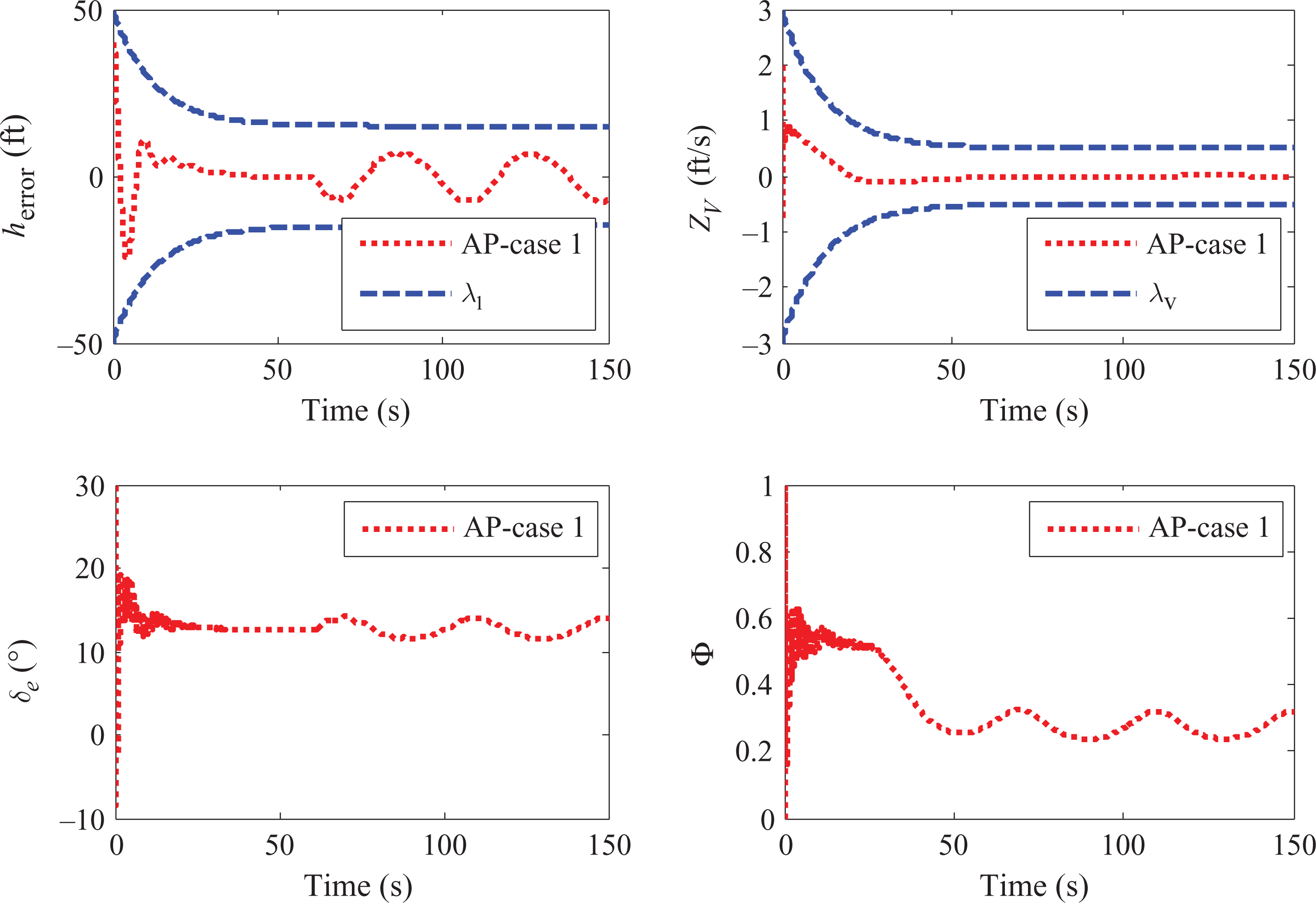
Tracking errors and control inputs with AP in case 1.
Simulation 2
To ulteriorly illustrate the robustness of the proposed RAP controller, the coefficient variation of the HFV model is taken into consideration in three different cases as shown below. For comparison purpose, the NNs are hold to be unvaried, while the control parameters, the performance functions and the initial values are kept as before. Thus the superiority of RAP is shown in Figures 6 to 8. First, we apply the AP scheme to control the HFV with coefficients variation like cases 1 and 2. As Figure 6 clearly demonstrates, the output performance of AP controller can be ensured with case 1. Unfortunately, if we increase the coefficient to case 2 without changing the control gains, the tracking errors of AP control approach overstep the prescribed performance bounds λ1 and λV; meanwhile, the closed-loop system becomes unstable as shown in Figure 7. In contrast to AP control scheme, we apply the RAP control scheme to HFV affected by the same coefficient variation with case 1. As shown in Figure 8, the RAP control scheme also guarantees the output error performance. If we increase the coefficient to case 2, the output tracking prescribed performance and stable closed-loop system behaviour of RAP control scheme are still achieved. It must be pointed out that the RAP control scheme operates successfully even though we further soar the coefficient to case 3. Therefore, compared to AP control scheme, the significant increase in robustness of the proposed RAP is achieved.




Tracking errors and control inputs with AP in case 2.

Tracking errors and control inputs with RAP in cases 1, 2, and 3.
Conclusion
In this study, a guaranteed prescribed performance adaptive neural control scheme has been presented for flexible HFV. Using the MLP, FOSD technique and prescribed performance function, a low-computation state tracking error constrained adaptive neural controller is constructed, wherein the issue of increase of NN learning parameters and explosion of the items’ is removed. With the utilization of an assistant system, the problem of actuator saturation is also eliminated. Compared with other adaptive neural control designs, the proposed controller is not only able to ensure the state tracking errors confined in the desired performance sets but also owns low-computation and better robustness. Finally, two simulations have been performed to demonstrate the robustness of this control scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the Natural Science Foundation of China (Grant no,61573286, 61374032 ), Aeronautical Science Foundation of China (Grant no, 20140753012).