
Abstract
In this thesis, an innovative model-free adaptive control strategy based on a multi-observer technique that takes advantage of input/output measurement data is proposed for the aeroelastic system of the two degree of freedom pitch-plunge wing, and this unknown complicated nonlinear system is a general multi-input multi-output plant with input constraints. In this algorithm, the multi-observer technique is applied to estimate the value of the pseudopartial derivative parameter matrix in the approach of the compact form dynamic linearization designed to linearize the model of the two-dimensional wing-flap system with input constraints. At the same time, this model-free adaptive control method consists of the approximate internal model and the optimal controller. Moreover, this control scheme is based on the linear matrix inequalities, which is a kind of real-time computation. In the design process for controlling this two-dimensional wing-flap system in the condition that the control inputs are subjected to amplitude and change rate limits, the problem of the dynamic control is transformed into the optimization problem, which can minimize the performance index. Finally, simulation results for the two-dimensional wing-flap system with input constraints can demonstrate the availability and potential of the presented multi-observer-based model-free optimal control strategy for unknown nonlinear multi-input multi-output system with input saturation.
Keywords
Introduction
Model-based control strategies can be used in a variety of domains when the superior identification of plant dynamics and the knowledge of the processes can be obtained. However, due to the shortage of the adequate priori physical models, these methods cannot get the good performance and strong robust. 1 –3 Unfortunately, it is the common case that we cannot obtain the precise matching models of control systems with complex dynamics and highly nonlinear characteristics in the modern industry. For solving this intractable and unavoidable problem, the adaptive techniques for the general nonlinear systems on the basis of neural network and fuzzy logic come into being during the last several decades. 4 –7 However, there are still some disadvantages for the methods of fuzzy logic and neural network, such as no assurance of high convergence speed and so on. Furthermore, it is very difficult to select the amount of the fuzzy control rule base in fuzzy logic. Similar to the condition of fuzzy control, it is very hard to do the decision for the amount of the hidden units in the general neural network control.
The data-driven control (DDC) serves as the effective approach when the indispensable control information is obtained immediately from a lot of process data. This term of data driven was first proposed in computer science, and many researchers in the control society pay attention to this method in recently years. 8,9 The controller of the DDC strategy is only based on input/output measurements in the process dynamics. In the design procedure, the unmodelled dynamics are not necessary. In addition, DDC technique makes good use of a plenty of measurable control data to get the adequate information of the control plants. 10 In recent years, the methods of data driven can be used to many aspects, such as fault diagnosis, 11 robot control, 12 and aeronautical and aerospace area. 13 With the development of the control theory, there are several typical DDC strategies, for example, model-free adaptive control (MFAC), 14 lazy learning approach, 15 and dynamic optimization strategy. 16
MFAC is one of the most popular DDC methods used in many fields. Hou and Jin 17,18 and Xu et al. 19 have taken use of compact form dynamic linearization (CFDL) to design MFAC algorithm for discrete-time systems. Others also have utilized the techniques of partial form dynamic linearization or full form dynamic linearization to achieve the same goal. 20 But the vast majority of results for MFAC is aimed at the systems of single-input single-output (SISO). Many control laws for SISO systems cannot be applied to the multi-input multi-output (MIMO) systems due to unavoidable existence of the input coupling. 21 Moreover, in many control design for MIMO systems, the decoupling matrix must be calculable for the convenience to decouple the control inputs. In some cases, the decoupling control is very difficult to be realized, and the performance of the control is not satisfactory.
Under the background that modern science and technology have been developed at top speed, there has been a noticeable increase in methods to control the aeroelastic system, which is a typical nonlinear MIMO system. However, most of the strategies have been adopted on the basis of accurate mathematical models for aeroelastic plants. According to inherent characteristics of the structural and aerodynamic nonlinearities for the aeroelastic system, the precise model of the aeroelastic system cannot be easy to get. 22 When those nonlinearities exist in the system, the aeroelastic system may present several undesired responses such as limit cycle oscillation or flutter. 23 Under the condition of considering those nonlinear characteristics in the aeroelastic system, the general model-based methods are difficult to obtain the satisfactory control performance. In actual control process of aeroelastic system, magnitude and rate constraints of control inputs are known as the most important nonlinearity in the aeroelastic system although many researchers have ignored these serious problems. 24,25 If the constraint problems cannot be considered, the performance of the aeroelastic system may decrease in some extent. In more serious condition, the system can become unstable. Optimal control, which has the capability of handling multiple constraints, is the common systematic method. A model predictive control method with the capability of prediction serves as an effective way to solve the problems of various constraints, including amplitude, rate, and state constraints.
In this thesis, we present a kind of innovative MFAC method for aeroelastic systems with input constraints, which are MIMO nonlinear control systems with unmatched model and varied disturbances. From some research achievements in dynamic linearization, 18 we propose an innovative control strategy based on the multi-observer for the two degree of freedom (2-DOF) pitch-plunge wing, which is the typical aeroelastic system. In this algorithm, the pseudopartial derivative (PPD) can be adopted to linearize this complex aeroelastic wing with nonlinear characteristics. Due to the inevitable existence of the control input constraints in this dynamic process, we must design a unique constrained controller from online identified multi-observer model and the internal model optimal control. Simulation results for the 2-DOF pitch-plunge wing are shown to prove the high efficiency of this presented MAFC strategy. The main innovative points in our paper are described as the following details: (1) a novel multi-observer-based MFAC scheme is presented for such MIMO aeroelastic system with uncertainties; (2) in the design process of controller, magnitude and rate limits of control inputs are considered in this MIMO nonlinear aeroelastic system; and (3) the optimal control problem subjected to the magnitude and rate constraints of control inputs is transformed as a problem of real-time computation based on the linear matrix inequalities (LMIs).
The remaining parts of the presented article can be organized as follows. System description for 2-DOF pitch-plunge wing subjected to magnitude and rate constraints of control inputs is shown in ‘System description for 2-DOF pitch-plunge wing’ section. In ‘Main results’ section, CFDL for this MIMO aeroelastic system and MFAC strategy based on multi-observer is presented. In ‘Simulation results’ section, simulation results for 2-DOF pitch-plunge wing are given to demonstrate the availability and potential of this presented method. The conclusions are provided at the end of the thesis.
System description for 2-DOF pitch-plunge wing
In this section, we shortly introduce the 2-DOF pitch-plunge wing, which is the typical aeroelastic system, and the structure of the 2-DOF pitch-plunge wing is depicted in Figure 1. The general governing equation of this aeroelastic system with external disturbances, which is developed from the previous research results in, 13,26,27 is as follows
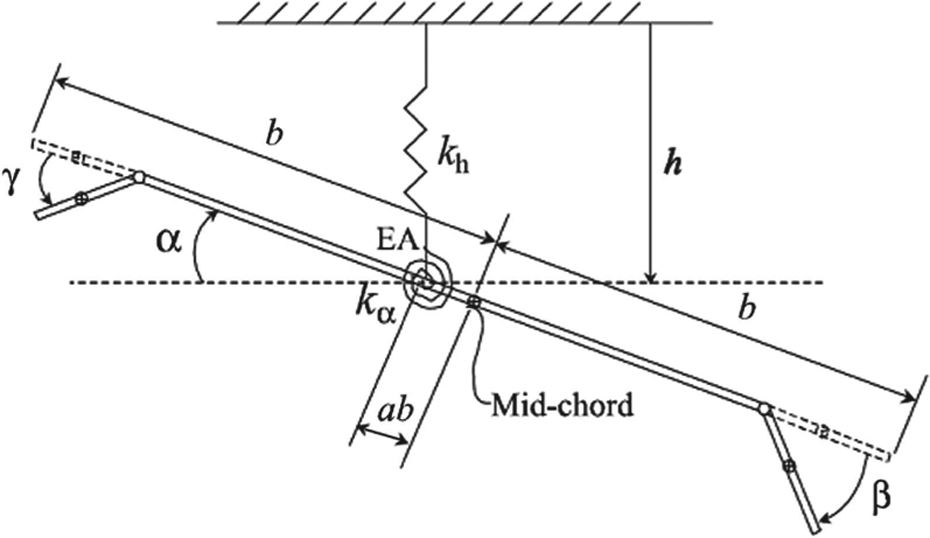
The constructional drawing of 2-DOF pitch-plunge wing. DOF: degree of freedom.

where α denotes the distance from midchord to elastic axis, b is the semichord, and ch and kh represent the values of structural damping coefficients and structural spring stiffness in plunging, respectively. cα and kα are similar to ch and kh in pitching, respectively. Iα denotes the elastic axis inertia, L and M represent aerodynamic lift and moment, Lg and Mg are aerodynamic lift and moment from external disturbances, mT and mω are mass of wing and pitch-plunge system, xα denotes distance from elastic axis to midchord, and α and h are pitching and plunging, respectively. In equation (1), the quasi-steady lift L and aerodynamic moment M can be written as

where Clα, Cmα, and Cmα−eff are change rate of lift, moment, and effective moment with respect to angle of attack, respectively. Clβ, Cmβ, and Cmβ−eff denote change rate of lift, moment, and effective moment with respect to trailing-edge control surface deflections, respectively. Clγ, Cmγ, and Cmγ−eff are change rate of lift, moment, and effective moment with respect to leading-edge control surface deflections, respectively. U∞ and ρ are freestream velocity and air density, respectively. β and γ represent trailing-edge flap and leading-edge flap, respectively. s denotes wing section span. Cmα−eff, Cmβ−eff, and Cmγ−eff are written as follows

From the above equation, we define the aerodynamic loads which have the bounded external disturbance as

where ωG(τ) represents the disturbance velocity, therein τ means the dimensionless time variable, which can be written as τ = U∞t/b. From the above formulas, we can get the following equation

where

In dynamic modeling, the 2-DOF pitch-plunge wing can be redefined in the following form

therein


The input of this system is defined as


Due to

Now, we consider the condition of control input saturation in this system of the 2-DOF pitch-plunge wing. The amplitude constraint of control input is shown as

where

where

where Ts denotes the sampling time. Considering the actual amplitude and the change rate constraints from the above analysis, for the next interval, two restrictive constraints can be concluded as

Main results
Dynamics transformation and linearization
In this section, a presented innovative constrained method is designed with the dynamic linearization. We transform the general system model of the 2-DOF pitch-plunge wing to the MIMO CFDL model. Furthermore, we use the method based on multi-observer to estimate the values of PPD parameters. Main contribution in this section is that we adopt a new PPD estimation strategy based on multi-observer.
This CFDL of the system for 2-DOF pitch-plunge wing is based on two necessary conditions.
19
First, the partial derivative of the output in the system with respect to
From equation (9), we can realize that partial derivatives of

where


The CFDL form of equation (14) can be divided into two MISO equations, and the two MISO equations based on dynamic linearization are defined as

where
Then, we design an observer to estimate the parameter vector

where
Therefore, due to equations (14) and (16), the output estimation error dynamic can be described as

where

The gain

where s1 denotes the positive constant. Therefore,
According to equations (16) and (17) in previous analysis, the error dynamics is described that

where Ω1 is given by

where I1 represents the identity matrix. The major property for estimation strategy can be summarized in a conclusion: assume that ∥Δ
Following the same steps as in the first observer, we design the second observer to estimate the parameter vector


where
For ascertaining research topic for the next content, two observers can be jointed as

where
Adaptive optimal controller design based on multi-observer
From this part, we show the adaptive optimal control method, which is a new strategy of internal model optimal control based on the multi-observer for the two-input and two-output system of the 2-DOF pitch-plunge wing.
Based on the above section, equation (21) can be rewritten as the following new form

where
It is easy to obtain that equation (22) can be redefined as

where

where

where
and

Schur complements. Define the diagonal matrices

where

Based on Schur complements, equation (26) leads to the matrix inequality

The control input is subjected to equation (13), and the constraint conditions are redefined that

where

where

This LMI formulation in equation (31) can be solved by standard algorithms. The controller of this aeroelastic system uses the reference signal
Internal gmodel control (IMC) method has the characteristic that its control device consists of a controller and a predictive model for control plant, 28,29 and this predictive model is known as the internal model. The internal model loop can obtain the error of actual outputs and IMC outputs. Figure 2 depicts the structure of MFAC scheme based on multi-observer for aeroelastic system with input constraints proposed in this article.

Model-free adaptive optimal controller design based on multi-observer for aeroelastic system with input constraints.
Some uncertainties including external disturbances can be eliminated to some extent filters, which can be properly chosen, like F1(z) and F2(z). The methods of design process for filter F1(z) and F2(z) can be found in the study by Nahas et al. 30
Because of that modeling error will be very large at high frequencies, we infer that the low-pass filter should increase the robustness of 2-DOF pitch-plunge wing. 30 In this section, the filter is chosen as F1 = (1 − κ1)/(1 − κ1z−1). The filter should be tuned, so as to have 0 < κ1 < 1 to guarantee stability of this aeroelastic system.
Remark 1
In many practical systems like many aeroelastic systems, the amplitude and the change rate of the control inputs in the system are not unrestricted. So the control saturation problems must be considered in the process of the controller design. However, a few researchers make substantial results in such problem for this nonaffine nonlinear systems. In this article, the amplitude and rate constraints of control input
Simulation results
This part shows some simulation results for proposed multi-observer-based model-free optimal control method for the 2-D wing-flap system with input constraints, showing that the tracking error of this aeroelastic system can be made arbitrarily small, and the proposed model-free optimal control strategy can eliminate the negative influence of the input saturation.
This 2-DOF pitch-plunge wing is directly impacted with variables γ and β and external disturbances. In this aeroelastic system (1), the parameter values applied for the simulation may be similar to the values used by Wang et al.
13
and Platanitis and Strganac.
31
The parameters, values, and units are summarized in Table 1. It is worth mentioning that all of the parameter values are applied to simulate this system of 2-DOF pitch-plunge wing. However, these parameters are realized as uncertain for the controller design. The initial conditions for α and h can be selected as 4.612° and 0 m. The initial values of

Parameters in the model of 2-DOF pitch-plunge wing.

DOF: degree of freedom.
when the matrix in equation (32) is nonsingular, we can get the relationship as follows

The upper bound of ωG(τ) are related to the value of U∞. When ωG(τ) becomes quite larger than constrained control signals, equation (32) can be nonexistent. Moreover, model variables α and h in this 2-DOF pitch-plunge wing are unable to reach the origin. For this simulation, all values of external signals are all less than 0.077 m s−1, corresponding to 0.58% of the velocity value U∞. In this article, ωG(τ) =
In the design of the multi-observer and the adaptive optimal controller,

Estimations of the PPD parameters in multi-observer. PPD: pseudopartial derivative.

Dynamic responses for aeroelastic system based on the proposed model-free adaptive optimal control method.
Conclusions
A novel multiple adaptive observer-based model-free optimal control strategy is proposed for the 2-D wing-flap system with input constraints, which is a MIMO nonlinear aeroelastic system under model mismatch and disturbances. According to CFDL technique, we use an innovative MFAC scheme combined with the adaptive multi-observer for nonlinear MIMO aeroelastic system. And the PPD was used to dynamically linearize this nonlinear aeroelastic system. Moreover, the constraints of control inputs are considered in the design process of this controller. In addition, that the presented control method is based on real-time computation of LMIs, which is an optimization problem to minimize the performance index. Finally, simulation results for the 2-D wing-flap system achieve well tracking ability and satisfactory robustness, which can certify the high efficient and potential of this creative control strategy. In the future, we will improve the robust to optimize this algorithm and improve the accuracy of measured data. Furthermore, we will use this method to nonlinear aeroelastic systems with more complex characteristics. We hope that we provide a new alternative method to deal with saturation problems for control inputs in MIMO nonlinear system for the other researchers.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China (61503156, 61473250, 61403161, and 51405198), the Fundamental Research Funds for the Central Universities (JUSRP11562 and NJ20150011), and the Natural Science Foundation of Jiangsu Higher Education Institution (14KJB120013).