
Abstract
This article proposes a control scheme for formation of maneuvers of a team of mobile robots. The control scheme integrates the integral sliding mode control method with the nonlinear disturbance observer technique. The leader–follower formation dynamics suffer from uncertainties originated from the individual robots. The uncertainties challenge the formation control of such robots. Assuming that the uncertainties are unknown but bounded, an nonlinear disturbance observer-based observer is utilized to approximate them. The observer outputs feed on an integral sliding mode control-based controller. The controller and observer are integrated into the control scheme to realize formation maneuvers despite uncertainties. The formation stability is analyzed by means of the Lyapunov’s theorem. In the sense of Lyapunov, not only the convergence of the approximation errors is guaranteed but also such a control scheme can asymptotically stabilize the formation system. Compared to the results by the sole integral sliding mode control, some simulations are presented to demonstrate the feasibility and performance of the control scheme.
Keywords
Introduction
Today, robots are changing the way we live and work. 1 They free human being at dangerous places. Manipulation at disaster sites, nuclear plants and warehouses, is often accomplished with robots. 2 To achieve some complex jobs in rescue, manufacturing, and space exploration, several robots have to cooperate with each other such that a multi-robot system consists of them. 3 The multi-robot system can deal with some tasks that are beyond the individual capacities. 4 Some potential advantages are often referred, such as efficiency, reliability, and flexibility. In the multi-robot system, each robot plays a unique role. To schedule the robots, coordination of such a system rises up. 5
Formation is one of the typical cooperative tasks. The task can be treated as a special case of consensus problems. 6 –8 Concerning the multi-robot system, the robots have to form up into some predefined shapes in order to achieve a given formation task. The background of formation originates from the real world. For instant, the robots need to maneuver in some formations when they move in very complex environments.
To achieve multi-robot formations, coordinated control mechanisms should be predefined. Up to now, several kinds of coordinated control mechanisms have been reported. These mechanisms can roughly be classified as behavior-based mechanism, virtual structure mechanism, and leader–follower mechanism. 3 Among the three categories, the category of leader–follower mechanism has become popular because its dynamics are experimentally modelled, but the internal formation stability can be theoretically guaranteed. 5 Based on the leader–follower mechanism, various control methods have been developed for multi-robot systems, that is, robust control, 9 model predictive control, 10 feedback linearization control, 11 backstepping control, 12 decentralized control, 13 to name but a few. A systematic review on this topic is presented by Kala. 14
As a nonlinear feedback design tool, the sliding mode control (SMC) technique 15 is attractive because of its invariance, meaning that matched uncertainties in an SMC system can be suppressed by the invariance. Some SMC-based methods have been addressed to solve the formation control problem of multi-robot systems, that is, integral SMC, 5,16 first-order SMC, 17 terminal SMC, 18 second-order SMC, 19 intelligent SMC, 20,21 and so on. These contributions have verified the feasibility of the SMC methodology for multi-robot formations.
Compared to other SMC methods, the integral SMC design can guarantee an integral SMC system against matched uncertainties from the initial time, indicating that an entire response of the system is of invariance. 5 Some successful applications of the integral SMC method have been reported in industries, for example, electric vehicle system, 22 aerospace engineering, 23 and so on.
Uncertainties exist everywhere. Recall the multi-robot system, where each individual robot may suffer from uncertainties, including but not limited to external disturbances, unmodelled dynamics and parameter perturbations. Affected by the uncertainties, formation dynamics of the multi-robot system become uncertain. Inherently, the formation uncertainties are unmatched such that the invariance of SMC cannot suppress them. In previous works about the SMC-based formations, 5,16 –20 the formation uncertainties are considered because they adversely affect the formation stability. Two solutions can be summarized from the works. One solution is to discuss the formation stability by means of graph theory. 16,21 The other is to analyze the formation stability in light of the Lyapunov’s theorem. 5,17 –20 To guarantee the formation stability, both the solutions need to assume that the formation uncertainties are bounded by a known boundary. Unfortunately, the boundary is rather hard to exactly measure or know in reality. The lack of such a boundary may result in severe problems, that is, decrease of the formation robustness, deterioration of the formation performance as far as deficiency of the formation stability. To obtain the important information, it is desired to adaptively approximate the formation uncertainties.
The technique of nonlinear disturbance observer (NDO) has been proven to be effective in handling uncertainties and improving robustness. 24 The applications of NDO have been investigated by some actual cases. 25 Such a technique can be considered as an alternative to attack the issue of formation uncertainties. So far, the academic problem of how to eliminate the adverse effects of the formation uncertainties by NDO still remains unsolved and problematic.
Concerning the formation problem of an uncertain multi-robot system, this article proposes a control scheme that integrates one controller with one observer, where the controller is designed by the integral SMC method and the observer is structured by the NDO technique. One of crucial issues induced by the integration is how to ensure the integral SMC-based formation maneuvers with guaranteed stability in spite of the formation uncertainties. To settle the issue, an integral SMC law of the controller is developed by the Lyapunov’s theorem as well as the estimation errors of the observer. Some results are presented to demonstrate that the formation maneuvers are of asymptotic stability.
Modelling
One single robot
Consider a unicycle-like robot in Figure 1. The round robot is with a radius of r. It is equipped with two driven wheels that are symmetrically mounted on both sides of an axis crossing the center. Each wheel of the robot is independently controlled by one DC motor. Define a vector

One single robot.
In a multi-robot system, there are N identical robots displayed in Figure 1. Considering the pure rolling and nonslip conditions, the kinematic model describing the n th robot has the form of

The conditions indicate (1) subjects to

In (2),
Leader–follower mechanism
Having modelled the n th robot, a formation mechanism of the group should be defined to coordinate the robots and achieve their formation maneuvers. According to the leader–follower mechanism, appoint arbitrary one and name it leader. The remaining N − 1 robots are titled followers. Such a hierarchical mechanism creates N − 1 pairs, where the sole leader traces a predefined trajectory and all the followers takes charge of tracking the leader. To form up into a given formation, each follower has to keep track of its desired distance and relative angle from the leader. Figure 2 illustrates the mechanism by a pair, where indexes i and k represent the leader and the follower, respectively.

A leader–follower pair.
Given a receiver located at the leader’s center and a sensor equipped at the follower’s front castor, the distance lik is defined by
The individual uncertainties in equation (2) have unfavorable effects on the leader–follower mechanism, leading to the formation uncertainties. Such derivative uncertainties adversely affect the formation stability. Owning to their randomness and complexity, the formation uncertainties are rather hard to be modelled so that they challenge the formation control design very much. Motivated by the challenge, the article develops a control scheme under a mild assumption that the formation uncertainties are bounded by an unknown boundary. In order to concentrate upon the development, some ideal conditions in the pair are taken into considerations: (a) no collision, (b) no communication delay, and (c) the follower knows the leader’s posture as well as its own.
The leader–follower mechanism in Figure 2 can be modelled by differentiating lik and ψik twice with respect to time. Finally, the formation dynamics can have the form of

In equation (3),




From equation (3),
Formation design
Nonlinear disturbance observer
Assumption 1
Assumption 2
Consider the formation dynamics (3) and design the following NDO-based observer (4). 24

In (4),
Define an error vector

The solution of equation (5) is
Integral sliding mode controller
To coordinate the pair in Figure 2 by the integral SMC method, a nominal integral sliding surface vector (6) has to be developed at first.

where
Differentiate the vector δik in equation (6) with respect to time, substitute equation (3) into the derivative of δik and

Concerning the uncertain term, a real sliding mode surfaces vector is defined as

where
According to the designed control scheme, the control law is defined by

where
System structure
The system structure is presented in Figure 3. From Figure 3, the state variables, composed of lik, ψik, and their first derivatives, are located at the feedback channel. They feed on the NDO-based observer to estimate the approximation

Structure of the control scheme.
System stability
Assumption 3
Theorem 1
Consider the formation dynamics (3), take assumptions 2 and 3 into account, design the NDO-based observer (4), define the real sliding surfaces (8), and utilize the integral SMC-based control law (9). The closed-loop formation control system structured by Figure 3 is asymptotically stable if
Proof
Differentiate

Considering the control law (9), equation (10) becomes

From equation (5),

Select a Lyapunov candidate function
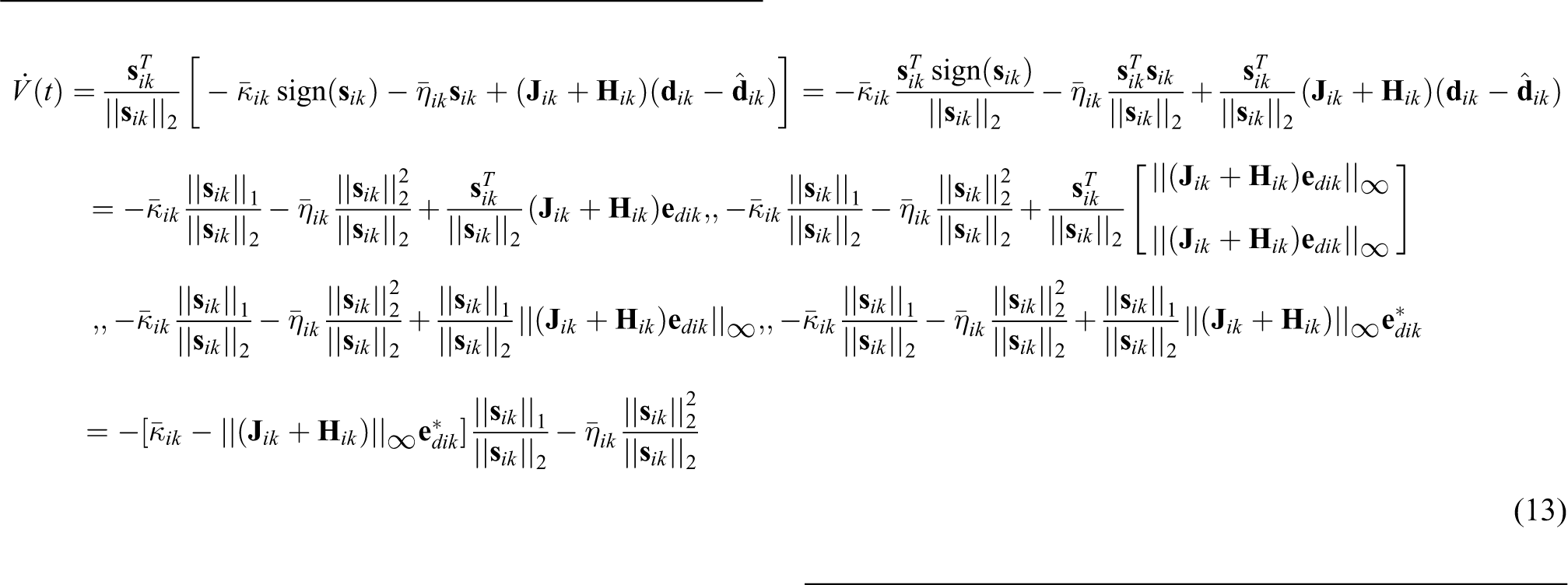
where
Pick up
Considering assumption 3,
Simulation results
To demonstrate the performance of the integral SMC-based control scheme, this section implements some numerical simulations on a multi-robot platform and discusses the results. The platform is composed of three mobile robots. The robots are identical (see Figure 1) with radius 0.05 m, where one leader is numbered by 1 and two followers are numbered by 2 and 3, respectively.
The leader in the formation mechanism is to take charge of tracking its predefined trajectories; its control can be treated as tracking control of a single robot and it is equipped with a kinematic-based sliding mode controller. 26 The designed control scheme is applied to the other two followers in order that the two robots can maintain the desired distances and the desired relative angles.
Δi and Δk in equation (3) are considered as
The parameter matrices
Consider the following formation task. The robots move along straight lines and form up into a string formation. Their formation maneuvers take place at t = 8 s. Thereafter, the alternative formation becomes triangular. The initial postures of the three mobile robots are located at
Figure 4 displays the group of mobile robots forms up into a triangular formation from a string one while moving in straight lines, where those filled circles denote the initial positions of the robots and those unfilled circles indicate the robots’ positions in the dynamic process. In each circle, the arrow means the orientation angle of that robot. To demonstrate their postures and formation, the solid lines in Figure 4 bond the robots together at the same moment. In the simulation, the desired linear velocity

Maneuvers of the multi-robot system from a string formation to a triangular one while moving along straight lines
In the process of achieving the formation task, some comparisons between the adaptive integral SMC and the sole integral SMC are shown in Figures 5, 6, and 7, where the uncertainties in the sole integral SMC-based formation control system are given a conservative boundary.

Performance comparisons between the integral SMC-based formation systems. (a) Distance l12, (b) relative angle ψ12, (c) distance l13, and (d) relative angle ψ13. SMC: sliding mode control.

Performance comparisons of

Performance comparisons of
Figure 5 depicts the system states of the two followers, that is, the distance lik and the relative angle ψik, where the dot curves are desired, the solid curves denote the performances by the presented control scheme (short for NDO-based integral SMC), and the dash curves delegate the performances by the sole integral SMC methd (short for integral SMC). Both the SMC systems share the same integral sliding surfaces. Although the control system can achieve the formation maneuvers by the sole integral SMC, the control system is more sensitive to uncertainties because it has no ability to adaptively resist unknown uncertainties. In contrast, the NDO-based integral SMC-based formation system is more robust and its curves are smoother in the dynamic process.
Figure 6 shows the control inputs of the follower 2 by the two integral SMC-based methods. In Figure 6, the curves by the sole integral SMC dramatically jump back and forth. The phenomenon originates from chattering, a drawback of SMC. The jumping points in Figure 6 are different in each of simulations because Δi and Δk are random. Compared to the results of the two methods, the curves by the NDO-based integral SMC are much smoother because the NDO-based observer can suppress uncertainties so that the control performances can be improved. Some similar results can be draw from Figure 7.
Figure 8 displays each elements of the real sliding surface vector

Sliding-surface vectors and their elements. (a) s12,1, (b) s12, 2, (c) s13, 1, and (d) s13, 2.

Approximation errors
Conclusions
This article has investigated the formation control problem for swarms of uncertain robots. By the leader–follower mechanism, individual uncertainties from the robots chain to the formation dynamics. The formation uncertainties bounded by an unknown boundary trouble the formation control problem. To resist the formation uncertainties when forming up the robots, the integral SMC-based control scheme is addressed. The control scheme consists of an integral sliding mode controller and a NDO. The theoretical analysis proves that the formation control system in the presence of uncertainties is of asymptotic stability. The control scheme has achieved the formation maneuvers by a multi-robot platform. The simulation results have demonstrated the effectiveness of the control scheme.
The control scheme benefits us a lot because it can approximate the boundary of uncertainties so that the formation control system can have the guaranteed stability. The effort to consider the communication topology of the multi-robot systems via the control scheme is our continuous interest and this field is still in progress.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China Project under the grants 60904008 and 61473176, and the Natural Science Foundation of Shandong Province for Outstanding Young Talents in Provincial Universities (ZR2015JL021).