
Abstract
This article seeks to achieve high tracking performance of the hybrid automobile electro-coating conveying mechanism with disturbances and uncertainties. An integral sliding mode control scheme is first presented to eliminate the reaching phase in sliding mode control. Then, an adaptive integral sliding mode controller is designed without knowing the disturbance information. Finally, a composite strategy, referred to as nonlinear disturbance observer (NDO)-based adaptive integral sliding model control, is put forward to further reduce the switching gain. By compensating the lumped disturbances via a NDO, the switching gain is only required to be higher than upper bound of the disturbance estimation error which is much smaller than actual disturbance. The results of both numerical simulations and experiments show that the proposed approach has good control performance especially in reducing the switching gain and alleviating the chattering problem.
Keywords
Introduction
The hybrid automobile electro-coating conveying mechanism is a hybrid mechanism composed of parallel and serial mechanisms. Compared with other commonly used conveying mechanisms, the hybrid conveying mechanism not only can effectively eliminate roof airbags, but also has the merits of strong loading capacity, high flexibility level, and environmental protection. 1 Hybrid conveying mechanism is a multi-input and multi-output highly nonlinear coupling system. The constant change of position, velocity and acceleration of the mechanism in the process of movement result in time varying characteristic of the Jacobian matrix, which makes the design of controller challenging. Meanwhile, due to the presence of friction, load variation, and unknown disturbances in practical application of hybrid conveying mechanism, high trajectory tracking accuracy and control performance is hardly achieved. Hence, a high performance controller with robustness is required to enhance the control performance.
Facing the complexities and control challenges mentioned above, various advanced control methods, such as adaptive control and H∞ control have been proposed to achieve high performances for the serial and parallel mechanisms in the past few decades. 2,3 To improve the ability of eliminating external disturbances and parametric uncertainties, sliding mode control (SMC) is a powerful nonlinear control technique. 4,5 SMC is widely used in various robotics, such as serial robots, parallel robots, series-parallel robots, non-holonomic robots, unicycle-like robots, wheeled mobile robots, and robot trajectory planning. 5 –12 However, there are two challenging problems in the process of conventional SMC: the chattering phenomenon and the reaching phase. Problem in order to overcome these shortcomings and improve the control performance, many researchers have proposed many SMC strategies. Some researchers have combined conventional SMC with other control algorithms to alleviate the chattering phenomenon, such as fuzzy SMC and second-order SMC. 13 –15
To solve the problem of reaching phase in SMC, the integral sliding mode control (ISMC) is introduced to compensate the disturbance from the very beginning of the control action. 5 The ISMC design methodology consists of two kinds of controls, namely a nominal control and a discontinuous control. 16,17 The nominal control determines the expected performance of the nominal system without perturbations, and the discontinuous control is used to eliminate the disturbances and model uncertainties. 17 The ISMC has been applied to serial and parallel mechanisms due to its simplicity and robustness.
However, there are two major shortcomings concerning the existing ISMC-based trajectory tracking controllers. The upper bound of the external and internal uncertainty needs to be known in advance when choosing the switching gain. Nevertheless, the value of upper bound may not be easily obtained. In practice, we always select a high switching gain, which will aggravate the chattering problem and result in unnecessary wear and tear of the actuator. In addition, the integral action always has some adverse effects on the control systems, such as large overshoots and oscillations. 18 –20
Therefore, two alternative techniques are proposed in this article to alleviate the chattering problem and enhance the transient response and performance. First, an adaptive law is designed to estimate switching gain according to the sliding surface deviation, which makes it possible to develop an adaptive integral sliding mode control (AISMC). 21 Second, a disturbance observer–based control (DOBC) scheme is proposed to further alleviate the chattering problem, which combines AISMC with a nonlinear disturbance observer (NDO). 22 An NDO is designed to estimate all the unknown disturbances and then compensate them within the closed-loop systems. The advantage of DOBC scheme is that it is not a worst-case-based control approach, while other robust control methods achieve the robustness at the cost of sacrificing the nominal control performance. 23 The DOBC scheme has been successfully applied to many kinds of engineering systems, such as robotic systems, 24,25 MAGLEV, 26 bank-to-turn missile, 27 and hydraulic servo. 28
The motivation of this article is to develop a trajectory tracking control scheme for the hybrid automobile electro-coating conveying mechanism with internal and external disturbances via an NDO. An NDO-based AISMC approach is proposed to improve the robustness and alleviate the chattering problem in SMC. The marked feature of the proposed approach is that the switching gain is only required to be higher than upper bound of the disturbance estimation error which is much smaller than actual disturbance. The rest of this article is organized as follows. The dynamic modeling of hybrid conveying mechanism is presented in the second section. In the third section, the proposed composite control scheme for the hybrid conveying mechanism is described. The results of simulations and experiments are discussed in the fourth section. Finally, conclusions are summarized.
Dynamic modeling
The hybrid automobile electro-coating conveying mechanism consists of two parts: traveling mechanism and lifting-turnover mechanism. In this article, the lifting-turnover mechanism is the research object. The structure of the lifting-turnover mechanism is shown in Figure 1, where

The structure of the lifting-turnover mechanism.
There are many methods that can be used in dynamic modeling of a hybrid conveying manipulator, such as Lagrange–Euler, Newton–Euler, and virtual principle. In this article, the Lagrangian–Euler method is used, the general dynamic equations are given by 4

where
In the above dynamic model, model errors, system uncertainties, frictions, actuator dynamics, and unknown external disturbance are not taken into consideration. The uncertainties are assumed to have bounds and can be denoted as

where

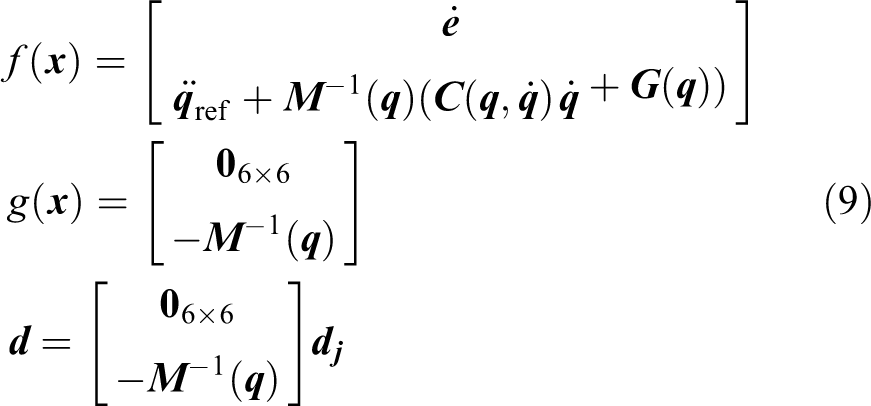
According to equations (2) and (3), the dynamic equation (1) of the hybrid conveying mechanism can be written in state space form as

where

where
Assumption 1
The inertial matrix
Assumption 2
The Jacobian matrix is non-singular in the work space.
Assumption 3
The lumped disturbance
The dynamic equation of the hybrid conveying mechanism in joint space coordinates can be obtained by Jacobian matrix transformation

where

where




Define the tracking error

where
Controller design
A controller with robust and high performance is needed to move the white car with the desired trajectory. Generally, there are two control schemes for the hybrid automobile electro-coating conveying mechanism. The first control scheme is known as task space control scheme and the second one is joint space control scheme. The former needs information of task space position of the hybrid conveying mechanism which can be measured by 6-DOF Cartesian position and orientation sensors. The latter can be simplified as control of the length of each leg, which can be computed by inverse kinematics. Both control schemes have their own advantages and disadvantages. The joint space control scheme appears to be preferable, because it does not need the task space position of the hybrid conveying mechanism. In this section, the disturbance observer–based AISMC is designed for the hybrid conveying mechanism in joint space. The block diagram of the proposed control approach is shown in Figure 2. First, suppose that the bound parameter uncertainties and external disturbances exist, an integral sliding mode controller is designed. Second, the adaptive law of switching gain is designed under the condition of not knowing disturbance information. Finally, in order to further enhance the control performance and alleviate the chattering problem, a NDO-based AISMC control scheme is introduced.

Block diagram of the proposed disturbance observer–based adaptive integral sliding mode control.
ISMC design
In the ISMC approach, the control law can be designed as

The ISMC is a combination of two controllers, namely the nominal control
The nominal control

where

It is implied that the tracking error
The sliding surface

where
When
Assumption 4
The lumped disturbance
The discontinuous control

where η is high enough to realize the sliding motion and defined as

From equation (13), if the system (8) is trapped on the switching surface (13), the equivalent dynamics of system (8) is determined by the equivalent control method, namely

Remark 1
From equation (8) and equations (11) to (16), at the sliding manifold
Lemma 1
If the sliding surface satisfies the condition, then the reachability condition of sliding mode can be guaranteed 5

However, the above condition can only ensure asymptotic reaching on sliding surface. A stronger condition for finite time reaching is given as follows 29

where λ is a positive scalar.
Theorem 1
The tracking control law (15) can guarantee the existence of the sliding mode.
Proof
Consider a Lyapunov function as

Taking the time derivative of the Lyapunov function for

Since

where ε is positive and small large than
Because

then

Since
AISMC design
In practice, the exact knowledge of the upper bound of

where

where a is used to regulate the estimation rate and
Theorem 2
The dynamic of the hybrid conveying mechanism (8) will asymptotically converge to the switching surface
Proof
Consider a Lyapunov function as

Taking the time derivative of the Lyapunov function for

Since

This implies that the reachability condition of the sliding mode is satisfied.
Define
Since

According to Barbalat’s lemma, 15 the following results can be obtained
that is

As the dynamics of system (8) at the sliding manifold is
DOBC-based AISMC design
As we know, the switching gain depends on the upper bound of the disturbance for the ISMC. Since the disturbances in the process of auto electrophoresis are complex, it may need high switching gain in AISMC if the disturbances are large. However, it is not practical to use a high switching gain in actual application. In order to solve this problem, a NDO is developed to estimate the lumped disturbance
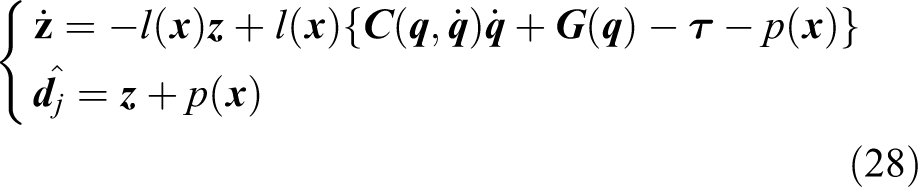
where
Assumption 5
Suppose the NDO is well designed and implemented, the observer (28) is globally asymptotically stable by choosing the observer gain
The following composite controller is constructed by

where
Remark 2
With a well-designed NDO,
Theorem 3
The dynamic of the hybrid conveying mechanism (8) will asymptotically converge to the switching surface
Proof
Consider a candidate Lyapunov function as

Taking the time derivative of
Since

where β is positive and smaller than
Remark 3
In the proposed controller (21), the discontinuous function
Simulation and experiments
Numerical simulations
In this section, a numerical simulation is presented and discussed to demonstrate the effectiveness of the proposed control scheme. The parameters of the prototype are listed in Table 1. The reference trajectory of the mechanism in task space is represented by the following equations 4


Parameters for the hybrid conveying mechanism.

The proposed control scheme is compared with other two controllers (SMC and AISMC) for performance comparison analysis. The proposed control scheme is designed as equation (23), the AISMC law is designed as equation (15), and the SMC law is given by

where
Real working conditions are taken into consideration in the simulation analysis, such as system parameter uncertainties, external disturbances, and mechanism with load. The uncertainties of system parameters are assumed to be about 10% of the nominal value. The external disturbance is
SMC:
AISMC:
NDO-based AISMC:
The simulation results for three different control schemes are shown in Figures 3 to 8. Figure 3 presents the time histories of position tracking for the conveying mechanism in task space. Figure 4 presents the time histories of position tracking error for the conveying mechanism in task space. Since the conveying mechanism is symmetrical, only results of the first slider, the second slider, and the active wheel are presented here. The plots of first slider, second slider, and active wheel position tracking errors are shown in Figure 5. Table 2 is the position tracking root mean square error (RMSE) of each joint under three controllers. It can be seen that three different controllers have successfully tracked the reference trajectory without knowing the upper bound of the total disturbances. Moreover, compared with other controllers, NDO-based AISMC has made the minimum tracking error and achieved the best tracking performance because ISMC could remove the initial tracking error totally. It is also noticed that the tracking performance of AISMC is similar to that of NDO-based AISMC. However, NDO-based AISMC has smaller tracking error than AISMC, which only needs a relatively smaller switching gain due to the combination with NDO. The merit of NDO is illustrated in Figure 6.

Position tracking performances in task space. (a) Tracking performances in Z-direction and (b) tracking performances in β-direction. SMC: sliding mode control; AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.

Position tracking error in task space. (a) Tracking error in Z-direction and (b) tracking error in β-direction. SMC: sliding mode control; AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.

Tracking error response of each joint. (a) Tracking error of the first slider, (b) tracking error of the second slider, and (c) tracking error of the active wheel. SMC: sliding mode control; AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.

Comparison of estimated switching gains. AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.
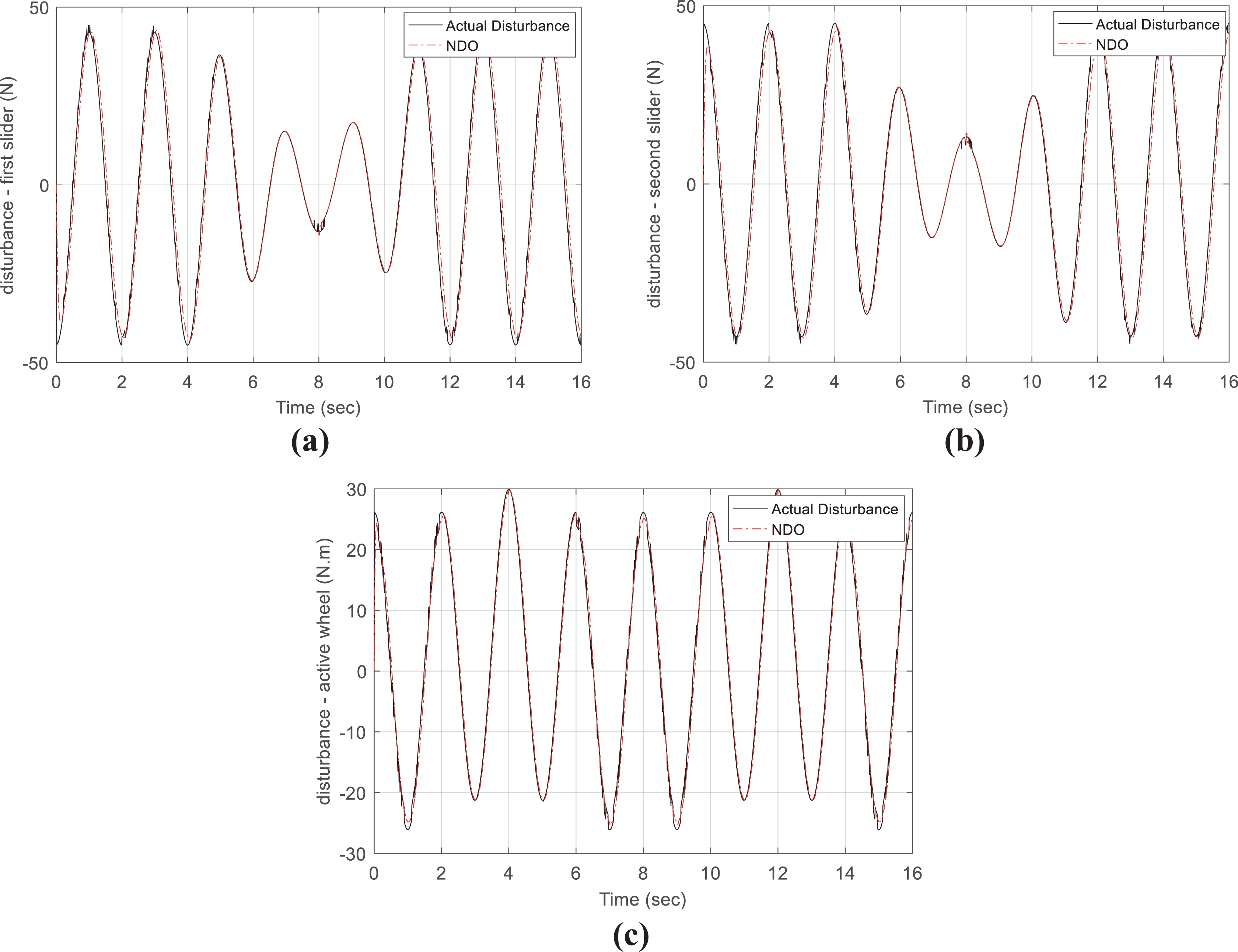
Disturbance estimation of each joint. (a) Disturbance estimation of the first slider, (b) disturbance estimation of the second slider, and (c) disturbance estimation of the active wheel. NDO: nonlinear disturbance observer.

Control force of each joint. (a) Control force of the first slider, (b) control force of the second slider, and (c) control force of the active wheel. SMC: sliding mode control; AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.
RMSE of each joint under three controllers.

Figure 6 shows the estimated switching gains of AISMC and NDO-based AISMC. It is obvious that the switching gain produced by NDO-based AISMC is smaller than that produced by AISMC, which is the same as the evidence stated in remark 1. The adaptive switching gain converges to the value that can guarantee the existence of the sliding mode. The adaptive switching gain is an estimation of the upper bound of
Figure 8 shows a plot of the control forces of each joint generated with three different control algorithms. It clearly indicates the alleviation of chattering for the proposed control scheme because a low switching gain is chosen. The control force of each joint is less vibrating, and the control activity is reduced. According to the abovementioned analysis and simulation results, NDO-based AISMC presents the slightest chattering among the other two algorithms, which verifies the effectiveness of the proposed control scheme.
Prototype experiments
The experiments are performed on the prototype of the hybrid conveying mechanism as shown in Figure 9. The hardware configuration of the control system consists of a PC-compatible computer, a UMAC controller, and eight servo systems. The PC-compatible computer is used to fulfill the task of human–computer interaction, code compilation, and file data management. The UMAC, which is made up of a TURBO PMAC2 CPU, two ACC-24E2A multi-axis motion control cards, a ACC-E1 Power supply card, and a ACC-65E I/O card, is used to realize the motion control of the conveying mechanism. The UMAC and the PC-compatible computer are connected via Ethernet. Each servo system consists of four MR-J4-100A AC servo drivers, four MR-J4-70A AC servo drivers, four HG-SR102BJ AC servo motors, and four HG-KR73BJ AC servo motors. The servo systems and UMAC are connected via RS232/485. The proposed controller is implemented on the PC-compatible computer, and the system’s control frequency is 100 Hz.

Experiment setup.
To confirm the performance of the proposed control scheme, experiments are carried out for the same desired trajectory which was used in the simulation studies. Since AISMC and NDO-based AISMC have better tracking performance than SMC in numerical simulation, the comparison between AISMC and NDO-based AISMC is made in the experiments. Figure 10 shows the experimental results. It clearly indicates that the position tracking errors in the experiment are much greater than those in simulation. Note that due to the measurement noise, the high feedback gain was not used in the experiment. We can see from Figure 10 that the proposed control scheme has good tracking performance and can effectively alleviate the chattering problem.

Experiment results. (a) Tracking error in Z-direction and (b) tracking error in β-direction. AISMC: adaptive integral sliding mode control; NDO: nonlinear disturbance observer.
Conclusion
In this article, the high performance tracking control of a hybrid conveying mechanism has been investigated. An NDO-based AISMC has been designed to improve the tracking performance and alleviate the chattering problem. An ISMC is first proposed to remove the reaching phase in conventional SMC. Then, an AISMC is proposed under the condition of not knowing the disturbance information. Combining NDO with AISMC, a composite NDO-based AISMC scheme can further alleviate the chattering problem, because the switching gain is only required to be higher than the upper bound of the disturbance estimation error. Numerical simulations and experiments for the hybrid conveying mechanism present excellent control performance especially in reducing the switching gain and alleviating chattering problem, which illustrates the feasibility of the proposed control method. Furthermore, the method can be possibly applied to other manipulators.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was financially supported by Blue Project of Jiangsu Province and the National Natural Science Foundation of China (Grant No. 51375210 and No. 61503162).